Замена мотора у квадрокоптера

В 90% случаях, мы бесплатно выезжаем в любую точку города в течении часа, для доставки квадрокоптера DJI до рабочего места технического инженера. Опытный курьер бережно отнесется к вашему имуществу и в целости доставит его в лабораторию

У нас в 80% случаев, ремонт дронов DJI выполняется менее чем за 1 сутки, а диагностика за 15-20 минут. Присутствует также срочный ремонт, он занимает от 30 минут времени, благодаря этому вы в кратчайшие сроки получите ваш квадрокоптер DJI исправным и готовым к работе.

Только мы, ремонтируем по стандарту ISO:9001-2008, используем оригинальные запчасти от производителя и проводим правильную диагностику, которая позволяет точно определить причину неисправности. При этом мы постоянно обновляем профессиональное оборудование в наших лабораториях.

Телефон директора, лица и фамилии сотрудников доступны в офисе. Мы отвечаем за работу каждого специалиста и тщательно контролируем деятельность всех отделов нашего сервиса. Только у нас высококвалифицированные специалисты, которые знают свое дело и справляются с любыми, даже самыми сложными поломками квадрокоптеров DJI.

Мы ценим отношение клиентов к нам настолько сильно, что при окончании гарантийного срока можно рассчитывать на бесплатный ремонт квадрокоптера DJI. Система скидок для постоянных клиентов позволит вам быть уверенными, что в случае поломки вашего дрона DJI вы будете знать, куда обратиться для качественного ремонта по выгодным ценам.

Это возможно благодаря нашей CRM-системе, которая позволяет анализировать работу по 75 основным параметрам и с высокой точностью настраивать режим и ритм работы на нужды клиентов.
Оставьте ваш вопрос через форму обратной связи и вам перезвонит именно мастер и ответит без навязывания каких — либо услуг.
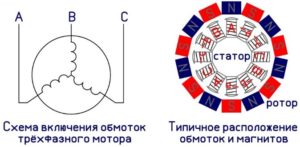
Ремонт бесколлекторного двигателя квадрокоптера, магниты

Ремонт бесколлекторного двигателя квадрокоптера, таких как 2205, 2206 и тд.
Каждый пилот квадрокоптеров сталкивался с крашами, краш (crash) с английского означает авария. Краши характерны для гоночных дронов, так как весь смысл владения таким аппаратом – гонять, облетать препятствия и делать трюки. Дроны для съемок падают редко и в основном из-за ошибки пилотирования, например, человек не увидел ветки или здание. На гоночных же, полет между веток и препятствий является целенаправленным.
Совет для новичков – учитесь летать в поле, там вы скорее всего не разобьете свой дрон, а падать вы точно будете.
Итак, в этой статье я расскажу и покажу, как ремонтировать двигатель после краша. Это единственный ремонт (еще можно поменять подшипники), который можно сделать без специального оборудования.
При крашах могут отлететь магниты, которые находятся в куполе. Они никуда не отлетят, но сместятся и начнут задевать нижнюю часть мотора или что еще хуже, могут заклинить.
После каждого краша осматривайте двигатели и если вы заметили, что начали торчать магниты, то не летайте, а меняйте двигатель на новый, а этот на ремонт. Характерным симптомом того, что магниты не на своем месте, будет скрипящий звук при работе.
Вводная часть закончена, теперь приступим к самому ремонту:
Для ремонта отвалившихся магнитов нам потребуется

- пинцет
- ватные палочки
- клей на основе цианоакрилата, дешевый не берите, иначе отвалится
- ацетон
- мотор
Двигатели могут быть разных корпусов и у них могут быть по разному сделаны пазы с подшипником, валом и стопорным кольцом. У меня два вида движков:




Как видите, они также отличаются и люфтом между нижней частью и верхней. У меня сломался тот мотор, который с левой стороны, т.е. с внутренним пазом.
Первым делом нам нужно снять стопорное кольцо. На правом это сделать значительно проще, а вот на левом это было сделать трудно, в итоге даже отломился кусочек ушка у кольца с левого мотора, который с пазом:


После того, как вы сняли кольцо, не потеряйте его. Далее нужно располовинить (раздвинуть) две половины мотора. Тянуть в стороны нужно руками, будет вот так:


А вот и наша проблема, магниты, которые отклеились и задевали нижнюю часть мотора:


Если внимательно посмотрите, то станет понятно, что они находятся не на ровной линии — кто ниже, кто выше.
Вот здесь ОЧЕНЬ ВАЖНО!
Не нужно снимать все магниты, так как они расположены поочередно — плюс/минус/плюс/минус и чтобы понять, где у магнита плюс, а где минус, вы потратите много времени:
Поэтому делаем так:
Берете пинцет и пробуете оторвать какой-нибудь магнит, если отрывается, аккуратно его снимаем и ложим той стороной, которой он был приклеен — на стол:

Далее берем ватную палочку, смачиваем в ацетоне и чистим паз в котором был магнит от грязи. Вытираем сухой и чистой стороной. Грязи будет будет много, это видно по фотке выше. Также берем магнит, не забывая какой стороной он лежит на столе и протираем ацетоном посадочную сторону.
Берем зубочистку, капаем на нее клей и аккуратно, тонким слоем смазываем площадку в куполе, т.е. паз, с которого сняли магнит. Только не лейте туда литр клея, мотор будет очень быстро крутиться, а этот клей создаст лишний вес в этой точке, мотор начнет вибрировать и быстрее изнашиваться.
Берем магнит и быстро ставим его на место, сильно прижимая.
Вот так делаем с каждым отвалившимся магнитом.
После проклейки мотора, смазываем маслом (не подсолнечным, а машинным, а лучше оружейным) ротор и подшипники. После этого ставим стопорное кольцо на место. Это то еще занятие по установке кольца в такой паз, мало того, что нормально не залезешь туда, так оно еще и крутится на роторе 


Все, попробуйте покрутить его, если все верно сделали, нигде ничего задевать не будет и его можно ставить на дрон.
Вот так вот вы смогли сделать ремонт бесколлекторного двигателя своими руками, ничего сложно нет в том, чтобы приклеить отлетевшие магниты моторы квадрокоптера.
Замена двигателей и регуляторов. Прошу совета!
Тема раздела Коптеры. Комплектующие, сборка, настройка. в категории Квадрокоптеры и мультироторы; Здравствуйте! Приобрёл б\у квадрокоптер Echine 250 Pro. Двигатели 2205 2300KV «уставшие». Купил Emax 2205 2300KV максимальный ток потребления до 30 .
Опции темы
Замена двигателей и регуляторов. Прошу совета!
Здравствуйте! Приобрёл б\у квадрокоптер Echine 250 Pro. Двигатели 2205 2300KV «уставшие». Купил Emax 2205 2300KV максимальный ток потребления до 30 А. Но регуляторы на квадрике на 20А. Купил регуляторы Favourite LittleBee Spring 30A с прошивкой BlHeli. Вопрос-стоит ли менять регуляторы? Нужно ли будет что то перенастраивать? Читал, что регуляторы настраивают по «пикам». Нет ли у кого мануала на такие регуляторы и нужен ли он в моём случае?
Если старые регуляторы были не BLHeli_32, то ничего перенастраивать не нужно, только откалибровать новые регуляторы.
«Если старые регуляторы были не BLHeli_32 » Я не знаю марку старых регуляторов. Они изначально были на квадрике и полностью в черной термоусадке.
4 регулятора по 20А это 80А! С учётом общей усталости квадрика, у меня есть сомнения, что на нем батарея способная отдать такой ток.
А с учётом первого квадрика, у пилота точно не возникнет желание открыть газ, чтобы такой ток запросить.
Поэтому забить и летать.
Регули по пикам настраивали где то пару веков назад.
Если все же требуется настройка, это надо делать через BLHeli Suite. Но это отдельная большая тема для обсуждения.
Подпишитесь на канал Джошуа Бардвела, на ютюбе. У него огромное количество видео по сборке и настройке дронов.
а разве моторы всегда потребляют одинаковый ток? возможно, что один или два мотора будут потреблять в разных режимах ток значительно выше чем другие моторы?
Во время манёвров — да. Секунду или две.
Это точно! Слишком резвый этот коптер для меня. Я только чуток подал стик газа вперёд, а квадрик уже в потолок врезался. На 4-х S. Хочу перевести его на 3S. Или как то на аппаратуре «придавить» газ. Мне не нужна скорость. Пока. Хочу просто полетать и поменьше падать. Дорого всё!
Так как я только-только вникаю в эту тему, то пока хотел бы обойтись без сложных настроек. Особенно без прошивок и программаторов . Пока только полетать!
Нашёл все же описание моего квадрокоптера. Регуляторы 20-ти амперные с прошивкой BlHeli. Получается, что я хочу поставить с такой же прошивкой , но мощнее. Может и в самом деле не стоит их менять с учётом того, что я хочу ограничить газ ?
Последний раз редактировалось Wik; 03.06.2020 в 22:52 .
 Жалко будет! Регуль может пригодится на другой модельке! Вот узнать бы где то токи потребления родных коптерных двигателей. Ведь те же самые 2205 2300kv! Не пойму почему у Emax 2205 ток до 30А, а на коптере при тех же движках регуляторы на 20 А?
Жалко будет! Регуль может пригодится на другой модельке! Вот узнать бы где то токи потребления родных коптерных двигателей. Ведь те же самые 2205 2300kv! Не пойму почему у Emax 2205 ток до 30А, а на коптере при тех же движках регуляторы на 20 А?
На деле моторы могут быть очень разные, потому что есть качество намотки, качество магнитов, зазоры и пр.
Ну и еще потребление тока зависит от пропеллеров. Поставьте 5030 и будут возможно те же самые 20 ампер.
Спасибо! Буду пробовать пока на родных регуляторах. Если замечу, что греются-заменю.
Решил проверить двигатели и регуляторы сначала на столе. Не запустились. Регулятор пропиликал при подключении АКБ. Подскажите-что не так делаю. Схема подключения
Лучше полетный контроллер использовать для тестирования. Сервотестер не всегда работает на копеечных регуляторах.
И 2S регулятор поддерживает?
А, и Сервотестер от чего питается? В регуляторе точно ВЕС есть?
Из регулятора выходят два тонких проводка с 3-х пиновой колодкой. Черный и белый подсоединены к 1 и 3. Я так понимаю, что чёрный-«земля», а белый-сигнальный. Вот их я и подключал на выход сервотестера. Буду пробовать подключать к полётнику. Спасибо за советы и помощь!
Последний раз редактировалось Wik; 04.06.2020 в 17:17 .
Но всё же хотелось бы научится проверять комплектующие по отдельности. Или минимальным комплектом (двигатель+регулятор). Объясните пожалуйста что я не так сделал.
В регуляторах есть косвенная защита проверки мозгов . В регулятор идёт шим сигнал скажностью в диапазоне от 1000 до 2048 микросекунд .
Первое чило 0 оборотов , второе максимум оборотов .Эти числа он сам запоминает при калибровке с пульта или при принудительной установке с помощью программатора через BLHeli Suite.
Числа могут быть разные, например 1020..2000. Причем программируя через программу можно отключить калибровку с пульта , чтобы случайно потом не сбить .( рекомендую )
Это очень важно . При включении ПК на все движки идёт шим с минимальной или начальной скважностью. Если эта скважность отличается от зашитой
в регуляторе то регулятор заблочится. Например ПК дает 1000 а в реге 1008 . Даже если числа совпадают то могут отличатся незначительно частоты кварцы на ПК и в реге.
И регулятор заблочится. Он должен получить точный шим от ПК или сервотестера и тогда запиликает мотор .
Нужно убедится что на выходе сервотестера есть шим , и он меняется. При включении питания на рег дать максимальный уровень газа , когда мотор пикнет дать минимум.
Это всё стаботает если в регуляторе не заблочена калибровка с пульта.
Ремонт квадрокоптера. Замена мотора
№1 снимайте пропеллеры при любых работах с квадрокоптером
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
Снимайте пропеллеры!
№11 проверка fpv системы
Перед первым полетом убедитесь, что FPV система корректно работает: камера fpv снимает и направляет видео в видеопередатчик, а он в свою очередь отправляет сигнал в ваш шлем или очки. Проверьте, совпадают ли каналы на видеопередатчике и шлеме/очках, качественная ли картинка.
Если у вас есть OSD, то его можно настроить под свои нужды, статья как настроить OSD Betaflight.
№15 тренируйтесь в симуляторах
Перед своим первым полетом вам просто необходимо сначала потренироваться в симуляторе, это позволит получить вам первые и необходимые навыки полета и, скорее всего, вы не разобьете дрон в первые секунды. Достаточно полетать в симуляторе часа 4 и уже можно будет пробовать летать на реальном квадрокоптере. Симуляторов очень много, большинство платные, но уже есть и бесплатные.
№3 используйте smoke stopper
Это приспособление очень недооценивают, а ведь оно может спасти ваш дрон от дыма, который выйдет из него после короткого замыкания. Смок Стоппер нужен для первого запуска дрона, благодаря ему электричество направится на лампочку, не спалив сам дрон. Будет обидно увидеть белый дымок из дрона, на который вы потратили тысячи рублей (или пару десятков), а он сгорит при первом же запуске.
№5 проверьте моторы
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Если мотор крутится не в ту сторону, можно исправить 3 способами:
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
№6 проверьте приемник
Подключитесь к бетафлайт и перейдите во вкладку «receiver». Подключите аккумулятор, включите пульт. Проверьте, все ли команды реагируют. Когда вы двигаете стиками и переключателями, цветные полоски тоже должны двигаться.
Если ничего не происходит, убедитесь, включен ли приемник и пульт, правильно ли подключен приемник. Также убедитесь, что во вкладке Конфигурация выбран правильный тип приемника (IBus, SBus и т.д.), а также правильный ли выбран протокол работы (мультишот, дшот и т.д.).
Если полоски двигаются, но не в том порядке, попробуйте поменять карту разметки с AETR1234 на TEAR1234 во вкладке «receiver».
Далее убедитесь, что среднее положение полосок на отметке 1500, а минимальные и максимальные 1000 и 2000 соответственно. Поправить значения можно кнопками на пульте:
или внеся корректировки через CLI, подробнее здесь (в статье это заголовок Receiver).
Неправильные средние значения приведут к тому, что ваш дрон начнет дрейфовать и лететь в разные стороны (смотря какой канал не в середине).
Проверьте, какое число показывает стик газа, когда он в нижнем положении. Число не должно быть выше 1040, в противном случае дрон не получится заармить (запустить двигатели).
№8 настройте failsafe
Failsafe — это одна из главных вещей, которую должен знать каждый новичок в первую очередь. Если вы не настроите Failsafe, то при потере сигнала ваш дрон просто улетит и будет лететь, пока не разрядится аккумулятор. О последствиях, думаю, можно и не говорить, это, как минимум, потеря денег, максимум — он упадет кому-нибудь на голову.
Как настроить Failsafe, можно прочитать здесь.
№9 откалибруйте регуляторы оборотов (esc)
Регуляторы не нужно калибровать, если используется протокол DShot, включая DShot150, DShot300, DShot600, DShot1200 и DShot2400. Но нужно будет калибровать, если у вас PWM, Oneshot125, Oneshot42 и Multishot.
Как откалибровать регуляторы оборотов, читайте здесь.
Rashvinta
RashVinta– программа расчета диаметра воздушного винта для квадрокоптера.
Программа RashVinta позволяет производить вычисления по следующим исходным данным:
- Мощность двигателя и диаметр винта;
- Мощность двигателя и частота вращения винта;
- Диаметр винта и его шаг.
В первом варианте отметка ставится только в поле «Расчет по диаметру винта». Задается размер пропеллера (в сантиметрах), мощность двигателя (в лошадиных силах), максимальная и средняя скорость летательного аппарата. Нажимается кнопка «Расчет». Результатом вычислений будут шаг и частота вращения винта.
Во втором варианте убираются все галочки. В соответствующие окна вводим мощность двигателя, частоту вращения винта, максимальную и среднюю скорость летательного аппарата. Нажимаем кнопку «Расчет». Результатом вычислений будут диаметр винта и его шаг.
Третий вариант расчетов предназначен для профессионалов. Метка ставится в поле «Указать параметры винта». В соответствующие окна записываются диаметр и шаг винта. Нажимается кнопка «Расчет». Результатом является профиль лопасти воздушного винта, который можно изучить в окне просмотра, меняя его масштаб и удаление от ступицы. В виде таблиц результат сохраняется в файле Date.html, присутствующем в каталоге программы.
Кроме того, программа может показать, как выглядит профиль лопасти под реальным углом наклона (галочка в поле «Профиль с углом»), а также продемонстрировать точки, по которым производился расчет (метка в поле «Показывать расчетные точки»).
Полученный профиль можно распечатать в масштабе 1:1.
Балансировка пропеллеров с помощью подручных средств
Купленные дешевые пропеллеры не могут быть на 100% сбалансированными, только если это не оптовый сбыт фирменных пропеллеров. Такие пропеллеры негативно влияют на работу ВМГ, что вызывает дополнительные вибрации и вследствие чего появляется “эффект желе” при съёмках видео.
В данном случае потребует процедура балансировки реквизитов для квадрокоптера. Для её выполнения потребуется:
- винт;
- скотч;
- суперклей (если не нашелся скотч);
- наждачная бумага;
- балансир для пропеллеров (в данном примере рассматривается – Du-Bro Tru-Spin, или можно использовать китайские аналоги, как на видео);
Чтобы приступить к балансировке, установите устройство на ровной поверхности так, чтобы ось была выровнена по горизонтали.
Перед балансировкой лопасти необходимо проверить на отсутствие повреждений, затем установить на ось и немного отклонить в нужную сторону. Далее смотрим на горизонтальное положение пропеллера, удалось ли ему вернуться после отклонения. Если нет, то нужно облегчить более тяжелую лопасть (наждачной бумагой).
При повороте балансировочного станка, необходимо удостовериться, что пропеллер держит равновесие в таком положении. Подчеркнем, что все процедуры по утяжелению и облегчению лопастей необходимо производить с внутренней стороны (вогнутых).
Далее проделываем процедуру балансировки ступицы. Перемещаем пропеллер вертикально, и смотрим, если есть отклонения в одну сторону, то утяжелять нужно противоположенную. Утяжелять можно с помощью лака или суперклея. Достигаем баланса, меняем положение – переворачиваем, и удостоверяемся, что баланс достигнут и с другой стороны. На этом балансировка лопастей пропеллера закончена.
Длина пропеллера и его шаг
Длина и шаг являются главными параметрами определяющие тягу. Во время вращения винта, лопасти образуют диск. Диаметр этого диска и есть длина. Под шагом понимают расстояние, которое винт может преодолеть за одно вращение, в некой плотной среде (если вспомнить шуруп, и то как он вкручивается в доску, то все становится понятно).
Тяга считается сильной, когда винтомоторная группа (ВМГ) винтами перемещает большой объём воздуха. При увеличении длины, шага или какого-то одного из этих параметров, где скорость вращения остается неизменной, тяга винтов увеличивается. Вместе с этим образуется турбулентность за счет увеличения сопротивления воздуха.
Для аэрофотосъёмки идеально подойдут большие пропеллеры с малым шагом, а небольшие винты с большим шагом подойдут для гоночных дронов, которым важна скорость полёта.
Другие преимущества
Этих преимуществ будет достаточно чтобы все же решиться использовать обратное направление вращения.
Из-за того, что передние винты будут вращаться не внутрь, а «наружу», то FPV камера будет собирать меньше пыли и грязи (однако грязь будет собирать ПК) 🙂
Также при использовании реверсированного вращения меньше шансов (теоретически) запутаться в тряпичных воротах.
Еще один плюс в том, что большинство из нас часто ломают CW или CCW винты и одного вида винтов остается небольшой запас. Это происходит потому, что мы левши или правши, и инстинктивно по-разному выполняем левые и правые повороты. Теперь мы можем поменять направление вращения и продолжить летать (чаще ломая те винты, которых у нас больше 🙂 прим. перев).
Как подобрать двигатель для квадрокоптера
Наш моторчик является коллекторным. Для покупки нового, необходимо знать его геометрические размеры: высота и диаметр корпуса, длина и диаметр вала.
В моем случае диаметр – 7мм., высота корпуса – 16мм., а длина вала – 5мм. В интернет-магазине они ищутся по маркировке «микродвигатель 716».
Как поменять направление вращения винтов?
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
- Снимаем винты
- Меняем направление вращения в регуляторах через BLHeliSuite
- Переходим в консоль Betaflight CLI и пишем:
set yaw_motor_direction = -1
save
Обновление (спасибо FEI): В BF 3.2. формат команды изменился:
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
Как разобрать квадрокоптер
Приступать к работам следует после отключения аккумулятора. Его я полностью достал из квадрокоптера. Далее необходимо снять пластиковые стойки с нижней стороны аппарата, они просто вытягиваются из отверстий в корпусе. В оставшихся отверстиях находится четыре болта.
После этого откручиваю два болта, крепящую пластиковую деталь над шестеренками. Это правая нижняя часть на рисунке, именно этот винт не крутится. Откручиваю винт, крепящий лопасть сверху, и снимаю ее.
Калькулятор ecalc
Для расчета винтомоторных параметров, при создании своих моделей беспилотных летательных аппаратов, есть очень удобный сервис – eCalc. Многие, кто собирает квадрокоптеры своими руками знают про этот онлайн калькулятор. Раздел, где приводятся параметры расчетов для квадрокоптеров, выглядит следующим образом.
Сперва может показаться, что всё понятно. Но следует знать о некоторых моментах, которые сильно влияют на результаты произведенных вычислений.
Первоначально, необходимо указать взлётный вес коптера. Если имеются подвесы и камеры, то их тоже нужно включить в этот параметр. Если сервис показывает Without Drive (что значит “без привода”), то нужно указать общий вес рамы, и вес других составных частей, таких как:
- пропеллеры;
- платы;
- контроллер;
- подвеса;
- камера;
- оборудование для FPV полетов.
Также необходимо прибавить к массе 10%, которую займут провода. На выходе получается искомая цифра полного взлетного веса квадрокоптера.
Указываем общее число роторов, по какой схеме они расположены – одиночной или соосной. Указываем верхнюю планку высоту полёта, погодные условия при полете – температура воздуха и атмосферное давление).
В выпадающем списке предлагается выбрать аккумулятор. При отсутствии нужной батареи, выбирайте ту что ближе подходит по токоотдаче и емкости. Далее, система завершит заполнение полей сама. Указываем вес и структуру батареи. При необходимости установить дополнительные АКБ, в текстовом поле P укажите их число. А в поле Weight указывается их суммарный вес.
Поле этого, в выпадающем списке указываем тип ESC, так называемый макс. ток этих регуляторов.
Указываем производителя моторов. В окне появляется его оценка. По показателям KV указывается нужный образец.
Теперь указываем параметры пропеллеров – тип, диаметр и шаг. По возможности, применяйте винт с максимально допустимым диаметром для данной рамы. Указывайте передаточное число, если у привода зубчатая трансмиссия. Количество зубьев направляющей шестерни к ведомой.
Если система не выдает нужных параметров, то можно указать в текстовом поле Custom. И там указать нужные параметры для расчета в калькуляторе. Имейте ввиду, что в одну ячейку указываются параметры батареи.
После заполнения всех полей, производится вычисления. На выходе вы получите необходимые данные. Они изображены в виде графиков, списков и циферблатов.
Количество и форма лопастей пропеллеров
Стандартным вариантом принято считать пропеллер с двумя лопастями. На большинство маленьких квадрокоптерах ставятся винты с лопастями больше двух. Это позволяет обеспечить более равномерный поток распределения воздуха, и как следствие снизить уровень турбулентности.
К тому же, за счет дополнительных лопастей увеличивается и подъемная сила. Таким образом, маленький диаметр винта с тремя (или более) лопастями, способен обеспечить силу подъёма, что и стандартный пропеллер с двумя лопастями и большим диаметром. Отзывчивость квадрокоптера, также зависит от количества лопастей у пропеллера, и чем больше их, тем отзывчивее дрон в полёте.
Присмотритесь на различия форм окончаний лопастей. Их подразделяют на три категории:
Винты Normal позволяют сэкономить расход аккумулятора за счет меньшей тяги, и благоприятно влияют на продолжительность полёта не вызывая дополнительного перерасхода энергии. На винтах Normal имеются заостренные наконечники. Равный диаметр винтов BN при их большой площади создает большую тягу.
Такое преимущество сопровождается недостатком – уменьшение времени полёта из-за высокого потребления энергии. Имеющиеся утяжелители на кончиках реквизитов, способствуют увеличению крутящего момента и повышают скорость реакции квадрокоптера по оси рысканья. Что касается наконечников HBN, то они находятся между Normal и Bullnose.
Методы установки
Установить винты на квадрокоптер можно по-разному. Очень часто вал электродвигателя представляет собой простой металлический штырь, не имеющий каких-либо приспособлений для установки пропеллера. В этом случае применяют специальные переходники – пропсейверы и цанговые зажимы.
Пропсейвер (см. фото) удобно использовать для проведения экспериментов при создании самодельных моделей. Он выглядит как втулка, в боковой поверхности которой имеется два симметричных отверстия с установленными в них винтами. Приспособление устанавливается на вал, а винты затягиваются. Пропеллер также надевается на вал и фиксируется двумя нейлоновыми стяжками или резиновым кольцом.
Более надежным переходником является цанговый зажим. Он представляет собой резьбовое соединение с разрезной конусообразной втулкой. Цанга надевается на вал, далее устанавливается зажимная втулка, пропеллер и шайба. Вся конструкция фиксируется гайкой особой формы – коком.
Если ротор бесколлекторного двигателя находится снаружи (моторы класса Outrunner), то на его верхней поверхности обычно имеется несколько резьбовых отверстий для установки различных переходников и креплений.
У производителей готовых коптеров с бесколлекторными моторами очень популярен вариант с самозатягивающимися гайками от компании DJI. У таких двигателей вал заканчивается резьбой, противоположной направлению вращения ротора.
Механические проблемы
Попробуйте заармить дрон (запустить двигатели) и дать небольшой газ. Без пропеллеров, конечно же.
Теперь слушайте, как они работают — есть ли посторонний шум, скрежет, вибрации или подергивания. Скорее всего, мотор будет дергаться или вибрировать. Для исправления можно попробовать следующее:
- проблему может исправить монтаж полетного контроллера на мягкие подушки (силиконовые);
- если вы используете режим обновления 32К/32К, попробуйте вернуться на 8К/8К, так как на 32К гироскоп намного чувствительнее;
- попробуйте уменьшить значение фильтра гироскопа «low pass filter frequency» (это фильтр низких частот);
Если проблему не удалось устранить, почитайте эту статью, возможно, она вам поможет.
Если ваш квадрокоптер до этой проблемы летал нормально, то, скорее всего, дело в механическом повреждении одного из компонентов. Это также может привести к вопросу, почему переворачивается квадрокоптер.
На двигателе могут отвалиться магниты, вал, может рассыпаться подшипник или оплавиться эмаль на обмотке. Все это выводит из строя двигатель. Из-за магнита и подшипника заклинет, из-за вала может вылететь колокол или зацепится магнит — тоже заклинет. А оплавленная эмаль вызовет короткое замыкание — мотор сгорит.
От перегрева, а также от механических ударов могут выйти из строя регуляторы оборотов, так как это довольно сложная электроника, основанная на «ключах», и выход из строя одного из компонентов регулятора нарушит работу всей платы, а та в свою очередь — работу двигателя.
Если после калибровки акселерометра нет никакого эффекта и модель квадрокоптера по-прежнему не понимает, в каком она положении — у вас проблемы с датчиком, его нужно либо поменять (если вам повезло и вы специалист по ремонту электроники), либо заменить полетный контроллер.
Если во вкладке Setup моделька постоянно крутится и ведет себя неадекватно, то есть проблемы с гироскопом. Для проверки попробуйте отсоединить питание и снова включить — после каждого включения гироскоп проходит калибровку. Если это не помогло, то выход только в замене полетного контроллера.
Возможно, вам поможет статья: Не запускается квадрокоптер? Исправляем проблемы
Статья написана на основе.
Направление вращения
На мультикоптерах используются два типа двигателей – CW (с вращением вала по часовой стрелке) и CCW (с вращением вала против часовой стрелки). Схема установки моторов зависит от типа летательного аппарата. Несколько таких схем показаны на рисунке.
На направление вращения конкретного пропеллера указывает приподнятая кромка его лопастей.
Пластик и карбон: где качество и эффективность
Пластиковые пропеллеры пользуются большей популярностью. Их отличительные черты это:
- пластичность;
- низкая цена;
- большой выбор ассортимента;
- доступность;
Также стоит отметить, что более гибкие лопасти имеют повышенную устойчивость к деформациям при ударах о препятствие, но вместе с тем, имеются погрешности в балансировке.
На рынке также представлены карбоновые лопасти. Карбоновые винты высоки в цене, но обладают рядом положительных критериев:
Также на рынке представлены гибридные пропеллеры из пластика и углеродного волокна. Второй обычно усиливает первый. Пропеллеры такого типа дешевы в цене и не уступают по качеству и жесткости чисто карбоновым.
Под качеством реквизитов понимают то, насколько правильно они изготовлены. Правильное изготовление пропеллеров обеспечивает хороший баланс во время полёта и не создают дополнительную вибрацию ВМГ. Бренды, которые производят лучшие пропеллеры для квадрокоптеров и других летательных аппаратов – это GWS. Также еще рекомендуют APC, которую производят американцы, и EMP с большим ассортиментов товаров, не только реквизитов.
Поиск неисправности дрона
Первое, в исправности чего возникли сомнения – двигатель. Для его проверки достаточно было подключить к источнику питания и проверить вращается ли он. Извлекаем из своего посадочного места, перекусываем два провода питания.
Питаются моторчики от Li Po (литий-полимерный) аккумулятора, напряжение на котором 3,7 вольт. Подключив к блоку питания, обнаружил, что мотор потребляет большой ток, около 2 ампер, но сам не вращается, зато происходит сильный его нагрев. Это говорит о том, что двигатель неисправен, его необходимо заменить.
Проверка и калибровка
Завершив ремонт, заменив мотор, свинчиваем корпус винтиками. Устанавливаем на свое место винт и крепим его. Не исключено, что для нахождения квадрокоптера в устойчивом горизонтальном положении необходимо будет откалибровать дрон с помощью пульта.
Запускаем его, установив на ровной поверхности пола. Видим — что моторчик вращается, игрушка готова взлетать в воздух.
Ради интереса решил разобрать старый неисправный моторчик. На обмотке явно видны следы сгоревшего провода.
Проверьте пропеллеры
Правильно ли установлены пропеллеры? Квадрокоптер — это рама и 4 двигателя, от слова КВАДРО. Для правильного полета 2 двигателя должны крутиться по часовой стрелке и 2 против часовой.
Для удобного восприятия — просто запомните, что двигатели крутятся «внутрь» дрона.
На изображении выше хорошо видно кромку лопасти, которая будет цепляться за воздух.
Всегда снимайте пропеллеры, когда выполняете ремонт или настройку квадрокоптера, и не ставьте их, пока он не будет готов к полету.
Это очень важное правило, может что-нибудь замкнуть или вы случайно своими действиями включите газ — пропеллеры вас достаточно сильно поранят. Несколько тысяч оборотов в минуту в любом случае нанесут травму.
Лопасти пропеллеров могут не только вас порезать, но и замкнуть/перерезать электронику. Как правило, если производится какой-то ремонт на дроне, то со всех сторон начинают торчать провода и прочая электроника, чтобы был доступ к нужному месту.
Подключите квадрокоптер к Betaflight Configurator, перейдите во вкладку Setup, там вы увидите 3D-модель дрона. Подвигайте во все стороны дрон (который у вас на столе), он должен полностью повторять ваши движения. Если вы наклонили нос вниз, то моделька тоже должна наклониться стрелкой вниз.
Если вы наклонили дрон носом вниз, а моделька наклонилась вправо, значит, вам нужно внести корректировки во вкладке Configuration, в блоке меню «Board and Sensor Alignment». Как правило, проблемы такого характера бывают с осью вращения. Там нужно будет выставить значение в градусах, например, 170 (число рандомное, все зависит от того, как будет вести себя моделька по отношению к реальному квадрокотперу).
Проверить нужно следующее:
- все ли двигатели работают;
- в правильном ли направлении они крутятся;
- нет ли механических повреждений.
Подключите аккумулятор, запустите Betaflight configurator и перейдите во вкладку Motor. Поставьте флажок в положение «I understand» (я понимаю). Теперь по одному ползунку поднимайте вверх и смотрите, в какую сторону крутится мотор, схема вращения будет на той же странице. Не нужно сильно раскручивать моторы, без пропеллеров это им только вредит.
Если один из двигателей не реагирует или дергается, проверьте качество пайки от полетного контроллера до ESC (регуляторы оборотов) и от ESC до моторов.
Для более простого определения, в какую сторону вращается мотор, на него можно положить пропеллер (на вал), но не закручивать!
Просто необходимая вещь для гоночного квадрокоптера (да и для съемочного тоже), используется в основном для поиска после падения, своим сильным писком поможет найти дрон даже в густой траве. Также пищалка может издавать сигналы при неисправностях, готовности к взлету, низком заряде аккумулятора и так далее.
Несмотря на понятную принципиальную схему, вряд ли современные квадрокоптеры можно считать простыми устройствами. Даже самый недорогой беспилотник оснащается полетным контроллером и гироскопом. Продвинутые модели имеют на борту десятки датчиков, сенсоров, а сбором и анализом информации занимаются миниатюрные компьютеры.
И все же, если летательный аппарат вдруг начинает тянуть в сторону, или он не способен взлететь, то вряд ли причину стоит искать в электронике. Обычно поломка квадрокоптера заключается совсем не в этом.
Управление движением происходит следующим образом:
- Ускорение скорости вращения пропеллеров приводит к подъему аппарата
- Ускорение скорости вращения винтов с одной стороны и замедление с другой позволяет аппарату двигаться в сторону
- Ускорение винтов, вращающихся по часовой стрелке и одновременное замедление винтов, вращающихся против часовой, приводит к повороту квадрика
- Замедление всех винтов позволяет приземлить дрон на землю
Взлетает и летит коптер благодаря силе тяги двигателей. Стабильное положение в воздухе обеспечивается установленным на борту дрона гироскопом. Как видим, основные принципы управления довольно просты. И если, например, после команды на взлет, у коптера не получается приподняться, то проблема или в винтах, или в моторах. Другие компоненты выходят из строя заметно реже.
Современные бесколлекторные движки весьма надежны, поэтому, скорее всего, что-то не так с пропеллерами. О коллекторных двигателях этого сказать нельзя, и проверять в недорогих дронах нужно не только винты, но и моторы, тоже способные стать источником проблем.
В отличие от самолетов или вертолетов, любительские квадры не только проще в управлении, но и зачастую проще в ремонте. Более того, в некоторых ситуациях ремонт вовсе не нужен.
Конечно, охватить все существующие неполадки квадрокоптеров вряд ли возможно. Все модели разные, и, хотя их и объединяют общие принципы работы, однако электронная начинка, интеллектуальные режимы, настройки управления отличаются порой кардинально. Но можно дать некоторые общие рекомендации.
Типичная проблема, с которой сталкиваются новички – коптер не взлетает, хотя винты исправно вращаются на увеличенной мощности. Скорее всего, дело в неправильно установленных пропеллерах.
Понять, как правильно установить винты на квадрокоптер, очень легко. Проверьте маркировку, нанесенную на них, а также маркировку на лучах. Они должны совпадать. Скорее всего, пропеллер, который должен вращаться по часовой, был поставлен на двигатель, вращающийся против часовой стрелки (или наоборот).
В результате, направление вращения винтов оказалось неверным. Из-за этого дрон не способен взлететь. Прежде чем что-то разбирать или относить коптер в ремонт, еще раз проверьте правильность установки винтов.
Более сложной, но не безнадежной, является ситуация, в которой при запуске беспилотника один или несколько моторов не включаются. Обычно такая ситуация характерна для коллекторных двигателей, не отличающихся высокой надежностью.
Впрочем, может быть дело не в движке, а в банальном обрыве провода или в плохом контакте. Провода нередко рвутся после неудачных приземлений, тогда как контакты могут окислиться под воздействием влаги.
Внимательно осмотрите неработающий двигатель и провод, идущий к нему. Если визуально неисправности не обнаружены, можно прозвонить электроцепь движка. Если и прозвон ничего не дал, тогда нужно проверять сам электродвигатель. Возможно, имело место короткое замыкание, либо же обрыв случился внутри корпуса. Сгоревший двигатель иногда можно опознать визуально.
В случае с бесколлекторными двигателями поломка может объясняться неисправностью электроники. Если не запускается бесколлекторный движок, то, скорее всего, из строя вышел электронный регулятор скорости (ESC). Подключите к исправному мотору тот ESC, который необходимо проверить.
Появление посторонних шумов при запуске движков может являться признаком неисправности. Вполне может быть, что шумы генерируются не самими моторами, а погнутыми или деформированными винтами. Проблема легко решается осмотром и ремонтом пропеллеров, либо же их заменой.
Поставьте коптер на ровную поверхность и внимательно присмотритесь к пропеллерам. Если один или несколько винтов являются выпуклыми, скорее всего, именно они являются источником шума. Искривление поверхности пропеллера приводит к уменьшению подъемной тяги, ведь скорость винта снижается.
Хуже, если шум издают двигатели. Это может говорить о том, что поломка скрыта внутри корпуса мотора. В таком случае ремонт квадрокоптера будет заключаться в проверке и замене движков.
Отсутствие реакции на команды зачастую объясняется тем, что в пульте дистанционного управления сели батарейки или разрядился аккумулятор.
Если сигнальный индикатор на аппаратуре не загорается, то с высокой долей вероятности все дело в севших батарейках. Соответственно, никакой ремонт проводить не нужно. Достаточно вставить свежие элементы питания.
Бывает и так, что пилот неверно выполняет последовательность действий, соединяя коптер с пультом. В инструкции обычно подробно расписываются шаги, которые необходимо совершить, чтобы инициализировать беспилотник. Иногда причиной отсутствия реакции на команды является неверное положение дрона (аппарат перевернут или лежит на боку). Некоторые модели дронов не реагируют на пульт до тех пор, пока не будут установлены на горизонтальную плоскость.
Если замена батареек и правильно проведенная процедура инициализации ничего не дали, то проблему следует искать в проводах и контактах, иными словами, внутри пульта. Возможно, все дело в окислившихся батарейках. В таком случае нужно их заменить и протереть контакты.
Проверьте схему двигателей (mixer)
Перед этой проверкой снимите пропеллеры!
Если у вас переворачивается квадрокоптер, откройте Betaflight и подключите аккумулятор к дрону, затем перейдите во вкладку Motors и проверьте направление каждого двигателя в соответствии со схемой. На глаз вы навряд ли сможете определить направление, так как мотор будет слишком быстро крутиться даже на малых оборотах, поэтому используйте палец. Слегка дотроньтесь до мотора и вы поймете, в какую сторону он крутится.
Если по схеме выяснилось, что мотор крутится не в ту сторону, есть два способа это исправить:
- перепаять провода
- зайти в BL_heli и сделать реверс.
Снова зайдите в Betaflight во вкладку Setup, там будет 3D-модель вашего дрона. Возьмите его в руки и подвигайте, модель должна четко повторять ваши действия. Если вы наклоняете вперед, а моделька наклоняется вправо, то вам нужно скорректировать направление.
Также нужно откалибровать акселерометр. Перейдите во вкладку Setup, там будет кнопка Calibrate. Установите дрон на ровную поверхность и нажмите кнопку. Возможно, датчик был не откалиброван и обманывал полетный контроллер, и последний пытался это исправить.
Во вкладке Setup будет блок для выбора схемы двигателей. Если у вас 4 двигателя, то должна быть выбрана схема Quad X.
Перед тем, как прикрепить моторы к раме, измерьте длину винтов. Слишком длинные могут повредить обмотку мотора, что приведет к короткому замыканию, да и просто испортит двигатель.
Сгоревшим мотором дело может не обойтись. Если вы еще не в курсе — карбон (материал, из которого сделана рама) токопроводящий материал, и если винт замкнет на проводку, то сгорит и вся остальная электроника, которая касается рамы.
Вот инструкция, как этого добиться при использовании Baseflight / Cleanflight или Betaflight
- Снимаем винты
- Меняем направление вращения в регуляторах через BLHeliSuite
- Переходим в консоль Betaflight CLI и пишем:
Ставим винты в обратном порядке, CW вместо CCW и наоборот. Не нужно переворачивать винты! 🙂
После обновления прошивок каждый раз убеждаемся, что у нас всё настроено как надо.
Ремонт (замена) моторчика дрона
Ремонт квадрокоптера заключается в замене одного из его коллекторных двигателей. Подобрав аналогичный моторчик, устанавливаем шестеренку на вал. Налезать она должна с небольшим усилием.
Обрезаем провода до нужной длинны. Залуживаем их и спаиваем с теми, которые идут от квадрокоптера. Не забываю изолировать их с помощью термоусаживаемой трубки.
Двигатель с насаженной шестеренкой устанавливаем на свое место в корпусе квадрокоптера, следим при этом, чтобы зубья вошли в зацепление со второй шестеренкой.
Спецификация и характеристики
Чтобы понять параметры определенного пропеллера, следует смотреть на кодировку. Производители обозначают длину, шаг и количество лопастей в таком формате:
LLPPxB или LxPxB – где L-длина лопасти, P-шаг (указывается в дюймах) и B-количество лопастей.
На примере разберем два разных формата обозначения:
Так первый реквизит с пометкой 6045 (6 на 4,5), говорит о том, что у пропеллера две лопасти (по стандарту), 6-дюймов длина и 4,5-дюйма шаг.Во втором уже указано количество лопастей 5040 на 3 (5 на 4 и 3), где 3 на конце это, как раз, количество лопастей. А 5 и 4 дюйма, длина и шаг соответственно.
В некоторых случаях указываются обозначения направления вращения. Они указываются латинскими буквами – R и C. Так пропеллеры с пометкой (C) ставятся на двигатели CCW, а с пометкой (R) – на двигатели с CW. Еще некоторые производители указывают аббревиатуры из чего они изготовлены BN, что значит с заостренными наконечниками и утяжелителями или HBN – гибрид пластика и карбона (о них мы говорили выше).
Турбулентность
Более того, турбулентность, возникающая из-за передних винтов снижает эффективность задних (одна из причин, почему рама в виде растянутого креста более эффективна в этом плане — передние винты удалены от задних).
При изменении направления вращения винтов, точка приложения тяги передних винтов смещается внутрь, а задних — наружу, таким образом компенсируется потеря эффективности из-за турбулентности от передних винтов.
Центр приложения тяги
Когда винт вращается как отдельный стационарный объект, точка приложения силы тяги находится прямо на оси вращения винта. Когда коптер летит вперед, воздух влияет не только на коптер, но и на винт, т.е. смещает эту точку в сторону лопасти, которая движется против движения коптера (красный круг на картинке).
Это значит, что лопасть, которая движется вперед дает больше тяги, и гонит воздух сильнее, чем лопасть, которая движется назад.
На передних винтах точка куда прикладывается сила смещается наружу, а у задних — внутрь. Чем быстрее коптер движется, тем сильнее смещается эта точка. Из-за меньшего рычага, задние винты будут работать менее эффективно, чем передние.
Заключение
Как видим, подбор и корректировка пропеллеров для квадрокоптера является достаточно непростой задачей. Надеемся, что наш текст поможет любителям беспилотной авиации правильно выбрать, сбалансировать и установить пропеллеры на летательный аппарат собственной конструкции, а также устранить огрехи в работе винтомоторной группы серийных моделей.