Обмотки статора и ротора электрических машин переменного тока
Обмотка электротехнического изделия (устройства) — совокупность определенным образом расположенных и соединенных витков или катушек, предназначенная для создания или использования магнитного поля, или для получения заданного значения сопротивления электротехнического изделия (устройства). Катушка обмотки электротехнического изделия (устройства) — обмотка электротехнического изделия (устройства) или ее часть, выполненные в виде отдельной конструктивной единицы (ГОСТ 18311-80).
В статье рассказано про устройство обмоток статора и ротора электрических машин переменного тока.
Пространственное расположение обмоток статора:
Статор с двенадцатью пазами, в каждый из которых уложено по одному проводнику, схематично показан на рис. 1, а. Соединения между проводниками, уложенными в пазах, указаны только для одной из трех фаз; начала фаз А, В, С обмотки обозначены С1, С2, С3; концы — С4, С5, С6. Части обмотки, уложенные в пазах (активная часть обмотки), условно показаны в виде стержней, а соединения между проводниками, находящимися в пазах (лобовые соединения),— сплошной линией.
Сердечник статора имеет вид полого цилиндра, представляющего собой пакет или ряд пакетов (разделенных вентиляционными каналами) из листов электротехнической стали. Для машин малой и средней мощности каждый лист штампуется в виде кольца с пазами вдоль внутренней окружности. На рис. 1,б дан лист статора с пазами одной из применяемых форм.
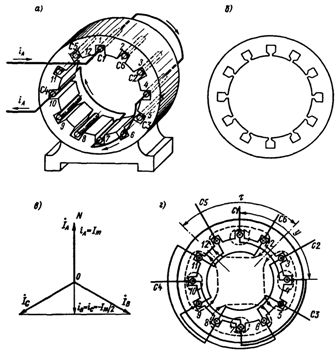
Рис. 1. Расположение обмотки в пазах статора и распределение токов в проводниках
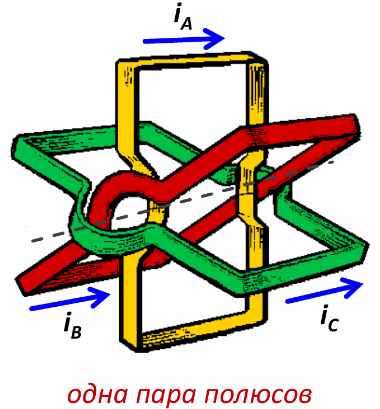
Пусть мгновенное значение тока iA первой фазы в некоторый момент времени максимально и ток направлен от начала С1 фазы к ее концу С4. Будем считать такой ток положительным.
Определяя мгновенные токи в фазах как проекции вращающихся векторов на неподвижную ось ON (рис. 1, в), получим, что токи фаз В и С в данный момент времени отрицательны, т. е. направлены от концов фаз к началам.
Проследим по рис. 1, г образование вращающегося магнитного поля. В рассматриваемый момент времени ток фазы А направлен от ее начала к концу, т. е. если в проводниках 1 и 7 он идет от нас за плоскость чертежа, то в проводниках 4 и 10 он идет из-за плоскости чертежа к нам (см. рис. 1, а и г).
В фазе В ток в этот момент времени идет от конца фазы к ее началу. Соединив проводники второй фазы по образцу первой, можно получить, что ток фазы В проходит по проводникам 12, 9, 6, 3; при этом по проводникам 12 и 6 ток идет от нас за плоскость чертежа, а по проводникам 9 и 3 — к нам. Картину распределения токов в фазе С получим по образцу фазы В.
Направления токов даны на рис. 1,г; штриховыми линиями показаны магнитные линии поля, создаваемого токами статора; направления линий определены по правилу правого винта. Из рисунка видно, что проводники образуют четыре группы с одинаковыми направлениями тока и число полюсов 2р магнитной системы получается равным четырем. Участки статора, где магнитные линии выходят из него, представляют собой северные полюсы, а участки, где магнитные линии входят в статор, — южные полюсы. Дуга окружности статора, занятая одним полюсом, называется полюсным делением.
Магнитное поле в различных точках окружности статора различно. Картина распределения магнитного поля вдоль окружности статора повторяется периодически через каждое двойное полюсное деление. Угол дуги 2 принимается за 360 электрических градусов. Так как вдоль окружности статора размещается р двойных полюсных делений, то 360 геометрических градусов равны 360р электрическим градусам, а один геометрический градус равен р электрическим градусам.
На рис. 1, г показаны магнитные линии для некоторого фиксированного момента времени. Если же рассмотреть картину магнитного поля для ряда последовательных моментов времени, можно убедиться в том, что поле вращается с постоянной скоростью.
Найдем скорость вращения поля. По истечении времени, равного половине периода переменного тока, направления всех токов изменяются на обратные, поэтому магнитные полюсы меняются местами, т. е. за половину периода магнитное поле поворачивается на часть оборота. Скорость вращения магнитного поля статора, т. е. синхронная скорость, равна (в оборотах в минуту)

Число р пар полюсов может быть только целым, поэтому при частоте, например, 50 Гц синхронная скорость может равняться 3000; 1500; 1000 об/мин и т. д.
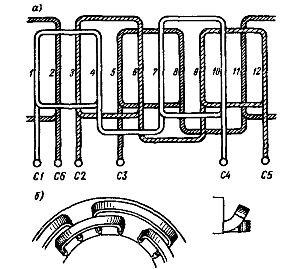
Рис. 2. Развернутая схема трехфазной однослойной обмотки
Обмотки машин переменного тока можно разделить на три группы:
К специальным обмоткам относятся:
а) короткозамкнутая обмотка в виде беличьей клетки;
б) обмотка асинхронного двигателя с переключением на разные числа полюсов;
в) обмотка асинхронного двигателя с противосоединеннями и т. д.
Кроме вышеуказанного деления, обмотки отличаются по ряду других признаков, а именно:
1) по характеру исполнения — ручные, шаблонные и полушаблонные;
2) по расположению в пазу — однослойные и двухслойные;
3) по числу пазов на полюс и фазу — обмотки с целым числом q пазов на полюс и фазу и обмотки с дробным числом q .
Витком называется контур, образованный двумя последовательно соединенными проводниками. Секция, или катушка, представляет собой ряд последовательно соединенных витков, лежащих в двух пазах и имеющих общую изоляцию от корпуса.
Секция имеет две активные стороны. Левую активную сторону называют началом секции (катушки), а правую — концом секции. Расстояние между активными сторонами секции называют шагом секции. Его можно измерять или числом зубцовых делений или в долях полюсного деления.
Шаг секции называют диаметральным, если он равен полюсному делению и сокращенным, если он меньше полюсного деления, так как шаг секции больше полюсного деления не делают.
Характерной величиной, определяющей выполнение обмотки, является число пазов на полюс и фазу, т. е. число пазов, занимаемых обмоткой каждой фазы в пределах одного полюсного деления:

где z— число пазов статора.
Обмотка, приведенная на рис. 1, а, имеет следующие данные:

Даже для этой простейшей обмотки пространственный чертеж проводников и их соединений получается сложным, поэтому он обычно заменяется развернутой схемой, где проводники обмотки изображаются расположенными не на цилиндрической поверхности, а на плоскости (цилиндрическая поверхность с пазами и обмоткой «развертывается» в плоскость). На рис. 2, а дана развернутая схема рассмотренной обмотки статора.
На предыдущем рисунке было для простоты показано, что часть фазы А обмотки, уложенная в пазах 1 и 4, состоит всего из двух проводников, т. е. из одного витка. В действительности же каждая такая часть обмотки, приходящаяся на один полюс, состоит из w витков, т. е. в каждой паре пазов помещается по w проводников, объединенных в одну катушку. Поэтому при обходе по развернутой схеме, например, фазы А от паза 1 нужно w раз обойти пазы 1 и 4, прежде чем перейти к пазу 7. Расстояние между сторонами витка одной катушки, или шаг обмотки, у показан на рис. 1, г; он обычно выражается в числах пазов.
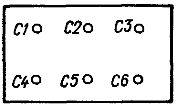
Рис. 3. Щиток асинхронной машины
Приведенная на рис. 1 и 2 обмотка статора называется однослойной, так как она укладывается в каждом пазу в один слой. Для того чтобы разместить лобовые части, пересекающиеся на плоскости, их изгибают по разным поверхностям (рис. 2, б). Однослойные обмотки выполняются с шагом, равным полюсному делению (рис. 2, а), или этот шаг равен в среднем полюсному делению для разных катушек одной фазы, если y > 1 , y . В настоящее время более распространены двухслойные обмотки.
Начало и конец каждой из трех фаз обмотки выводятся на щиток машины, где имеется шесть зажимов (рис. 3). К верхним зажимам C1, С2, СЗ (начала фаз) подводятся три линейных провода от трехфазной сети. Нижние зажимы С4, С5, С6 (концы фаз) либо соединяются в одну точку двумя горизонтальными перемычками, либо каждый из этих зажимов соединяется вертикальной перемычкой с лежащим над ним верхним зажимом.
В первом случае три фазы статора образуют соединение звездой, во втором — треугольником. Если, например, одна фаза статора рассчитана на напряжение 220 В, то линейное напряжение сети, в которую включается двигатель, должно быть 220 В в случае включения статора треугольником; при включении его звездой линейное напряжение сети должно быть
При соединении статора звездой нейтральный провод не подводится, так как двигатель является для сети симметричной нагрузкой.
Ротор асинхронной машины набирается из штампованных листов изолированной электротехнической стали на валу или на специальной несущей конструкции. Радиальный зазор между статором и ротором делается возможно меньшим для обеспечения малого магнитного сопротивления на пути магнитного потока, пронизывающего обе части машины.
Наименьший зазор, допустимый по технологическим требованиям, составляет от десятых долей миллиметра до нескольких миллиметров в зависимости от мощности и габаритов машины. Проводники обмотки ротора располагают в пазах вдоль образующих ротора непосредственно у его поверхности с тем, чтобы обеспечить наибольшую связь обмотки ротора с вращающимся полем.
Асинхронные машины выпускаются как с фазным, так и с короткозамкнутым ротором.

Рис. 4. Фазный ротор
Фазный ротор имеет, как правило, трехфазную обмотку, выполняемую, подобно статорной, с тем же числом полюсов. Обмотка соединяется звездой или треугольником; три конца обмотки выводятся на три изолированных контактных кольца, вращающихся вместе с валом машины. Через щетки, укрепленные на неподвижной части машины и скользящие по контактным кольцам, в ротор включается трехфазный пусковой или регулировочный реостат, т. е. в каждую фазу ротора вводится активное сопротивление. Внешний вид фазного ротора представлен на рис. 4, на левом конце вала видны три контактных кольца. Асинхронные двигатели с фазным ротором применяются там, где требуется плавное регулирование скорости приводимого в движение механизма, а также при частых пусках двигателя под нагрузкой.
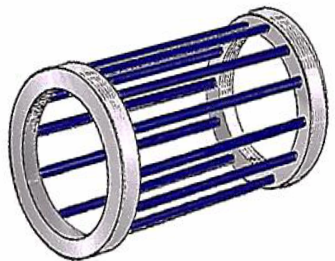
Конструкция короткозамкнутого ротора значительно проще, чем фазного. Для одной из конструкций на рис. 5, а показана форма листов, из которых набирается сердечник ротора. При этом отверстия вблизи наружной окружности каждого листа составляют в сердечнике продольные пазы. В эти пазы заливается алюминий, после его затвердения в роторе образуются продольные токопроводящие стержни. По обоим торцам ротора заодно отливаются алюминиевые кольца, замыкающие накоротко алюминиевые стержни. Полученная при этом токопроводящая система обычно называется беличьей клеткой.
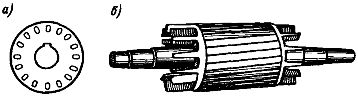
Рис. 5. Короткозамкнутый ротор
Короткозамкнутый ротор с беличьей клеткой представлен на рис. 5,б. На торцах ротора видны вентиляционные лопатки, отливаемые заодно с короткозамыкающими кольцами. В данном случае пазы скошены на одно пазовое деление вдоль ротора. Беличья клетка проста, не имеет скользящих контактов, поэтому трехфазные асинхронные двигатели с короткозамкнутым ротором наиболее дешевы, просты и надежны; они наиболее распространены.
Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
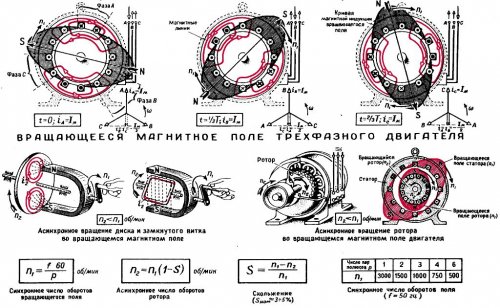
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших «короткозамкнутых» двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите — Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства — частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя — небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.
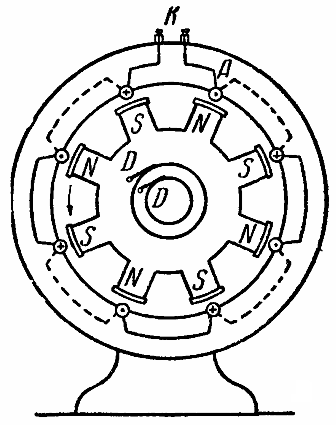
В теле статора размещена обмотка якоря. Ее длинные рабочие «активные» проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:
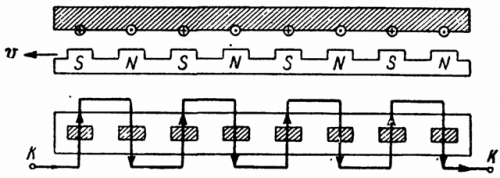
Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.
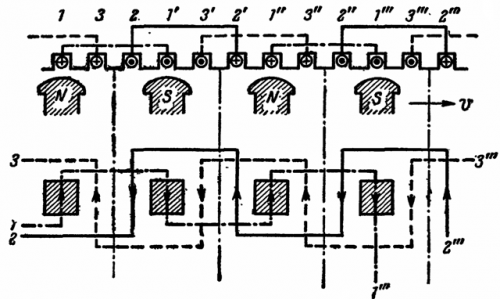
Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами — турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.
Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях). 
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он «выпадет из синхронизма» и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение