Структура и Основные технические характеристики приводов машин
В общем случае структуру технологической машины можно представить в виде, показанном на рис. 1.1.

Рис. 1.1. Структура технологической машины
Несущая конструкция (корпус, станина, рама, кузов и т. п.) – это часть машины, на которой устанавливаются все устройства машины. Исполнительное устройство (рабочий орган) — это часть машины, которая непосредственно выполняет заданную работу, – перемещает грузы, режет материал, красит, сваривает, собирает и т. п. Привод — это часть машины, с помощью которой приводится в движение исполнительное устройство.
Привод может состоять из одного двигателя и устройства его управления (так называемый “прямой привод”), например, привод вентилятора (рис. 1.2), но обычно включает большее число компонентов.
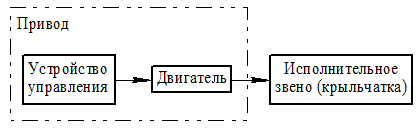
Рис. 1.2. Структура привода вентилятора
Структура устройства, приводимого в движение и управляемого человеком, изображена на рис. 1.3.
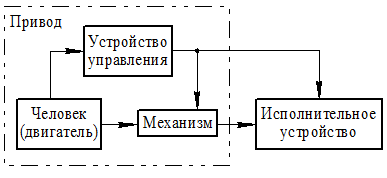
Рис. 1.3. Структура привода велосипеда
В качестве примера приведем велосипед. Здесь двигателем является человек, механизм выполнен в виде цепной передачи, муфты свободного хода и колеса, исполнительное устройство – это рама с седлом, она же является несущей конструкцией. Человек управляет механизмом и исполнительным устройством с помощью переключателя скоростей и руля.
Структура простого устройства, приводимого в движение двигателем и управляемого человеком, изображена на рис. 1.4.

Рис. 1.4. Структура привода шуруповерта
Пример – шуруповерт. Здесь двигателем является электромотор, механизм представлен в виде зубчатых передач и шпинделя с патроном, исполнительным органом является инструмент. Человек управляет двигателем посредством электронного регулятора, а механизмом – с помощью переключателя передач.
Значительно сложнее привод автомобиля. Он имеет множество устройств. Упрощенно структура привода перемещения автомобиля представлена на рис. 1.5.

Рис. 1.5. Структура привода автомобиля
Здесь мотор преобразует энергию сгорания топлива в механическую энергию. Устройство питания топливом (топливный насос, карбюратор или инжектор), устройство зажигания (катушка зажигания, трамблер, свечи), устройство газораспределения (распределительный вал, клапаны) обеспечивают работу мотора. Механизм (муфта сцепления, коробка передач, трансмиссия, колеса) передают и преобразуют движение мотора. Информационные устройства (датчики скорости, температуры, давления и др.) информируют человека и бортовой контроллер (на рис. 1.5 не изображен) о состоянии привода. Человек управляет приводом с помощью педалей газа и сцепления и рукоятки переключения передач.
Структура автоматического устройства, которое работает без участия человека, изображена на рис. 1.6. Подобная структура включает несколько (N) приводов, что часто встречается в машинах-автоматах. Здесь устройство управления машиной (например, контроллер) получает информацию от датчиков, расположенных на приводах и исполнительных устройствах, и управляет приводами согласно заложенной в него программе без участия человека. Человек периодически, в режиме загрузки программы управления, наладки и контроля за работой машины, взаимодействует, через пульт управления, с устройством управления машиной.
Таким образом, рассматривая различные структуры (рис. 1.2…1.6), видим, что привод включает, как минимум, двигатель – устройство для преобразования какого-либо вида энергии (электричества, газа, жидкости и т. д.) в механическую энергию. Чаще всего двигатель сопрягается с механизмом – устройством для передачи движения от двигателя к исполнительному устройству. Помимо передачи движения механизм, как правило, преобразует движение по виду (вращательное в поступательное и наоборот), а также по скорости и усилию (редуктор, мультипликатор).
Человек или автомат, так или иначе, управляют двигателем: включают и выключают двигатель, регулируют режим его работы. Поэтому в приводе всегда есть устройство управления двигателем.
Наконец, в состав привода большинства современных машин (даже бытовой техники) входят устройства информации — всевозможные датчики, передающие данные о состоянии самих приводов и окружающей среды. Наличие такой информации позволяет лучшим образом управлять машиной, существенно повышает надежность и качество ее работы.
К сожалению, у специалистов разного профиля нет единого определения понятия «привод». Специалисты по управлению под приводом понимают только управляющую часть, специалисты по электроприводу — только двигатель и устройство его управления (инвертор, преобразователь).
 | Рис. 1.6. Структура автоматической машины |
Специалисты по механике под приводом понимают двигатель и механизм. Мы под приводом будем понимать весь комплекс устройств, обеспечивающих движение исполнительного устройства.
Любые приводы и их отдельные части (например, двигатели) характеризуются следующими основными параметрами:
1 Вид движения выходного (исполнительного) звена
— сложное плоское или пространственное.
2 Характер движения выходного звена
— возвратно-поступательное или пространственное,
3 Кинематические параметры движения выходного звена
— ход s, шаг Ds (м, мм), угол поворота j, шаг Dj (рад, град),
— скорость линейная V (м/с, мм/с), скорость угловая[2] ω (рад/с, град/с),
— ускорение линейное a (м/с 2 , мм/с 2 ), ускорение угловое
e (рад/с 2 , град/с 2 ).
4 Диапазон регулирования
— диапазон регулирования перемещения,
— диапазон регулирования скорости.
5 Точность движения и остановки выходного звена
— точность остановки (позиционирования),
— точность воспроизведения траектории движения,
— точность воспроизведения скорости.
6 Динамические параметры
— частотные характеристики привода.
7 Силовые параметры
— номинальное развиваемое усилие на выходном звене
при поступательном движении – сила F (Н),
при вращательном движении – момент М (Нм).
при поступательном движении – P = F∙V (Нм/с, Вт),
при вращательном движении – P = М∙ω (Нм/с, Вт).
— удельное усилие и удельная мощность


где m – масса привода,
v – объем, занимаемый приводом.
 или
или  ,
,
где Fmax и Мmax – максимально допустимые, действующие кратковременно (обычно несколько секунд) усилия.
8 Инерционность движущихся частей привода
— масса m (кг) или момент инерции J (кг∙м 2 ) движущихся деталей привода,
— приведенная к двигателю масса mпр (кг) или момент инерции Jпр (кг∙м 2 ) движущихся деталей привода.
9 Коэффициент полезного действия (КПД) привода[3]
где h1, h2 … — КПД отдельных частей привода.
10 Надежность (безотказность) привода, ресурс (время службы), безопасность, ремонтопригодность, стоимость, доступность и др.
Электрические приводы. Виды и устройство. Применение и работа
Электропривод – электромеханическая система, служащая для привода в движение функциональных органов машин и агрегатов для выполнения определенного технологического процесса. Электрические приводы состоят из электродвигателя, устройства преобразования, управления и передачи.
С прогрессом промышленного производства электрические приводы заняли в быту и на производстве лидирующую позицию по числу электродвигателей и общей мощности. Рассмотрим структуру, типы, классификацию электроприводов, и предъявляемые к нему требования.
Устройство

1 — Передний крепеж
2 — Винтовая передача
3 — Концевой датчик
4 — Электродвигатель
5 — Зубчатая передача
6 — Задний крепеж
Функциональные компоненты

- Р – регулятор служит для управления электроприводом.
- ЭП – электрический преобразователь служит для преобразования электроэнергии в регулируемую величину напряжения.
- ЭМП – электромеханический преобразователь электричества в механическую энергию.
- МП – механический преобразователь способен изменять быстродействие и характер движения двигателя.
- Упр – управляющее действие.
- ИО – исполнительный орган.
Функциональные части
- Электропривод.
- Механическая часть.
- Система управления.
Исполнительный механизм является устройством, которое смещает рабочую деталь по поступающему сигналу от управляющего механизма. Рабочими деталями могут быть шиберы, клапаны, задвижки, заслонки. Они изменяют количество поступающего вещества на объект.
Рабочие органы могут двигаться поступательно, вращательно в определенных пределах. С их участием производится воздействие на объект. Чаще всего электропривод с исполнительным механизмом состоят из электропривода, редуктора, датчиков положения и узла обратной связи.
Сегодня электрические приводы модернизируются по их снижению веса, эффективности действия, экономичности, долговечности и надежности.
Свойства привода
- Статические . Механическая и электромеханическая характеристика.
- Механические . Это зависимость скорости вращения от момента сопротивления. При анализе динамических режимов механические характеристики полезны и удобны.
- Электромеханические . Это зависимость скорости вращения от тока.
- Динамические . Это зависимость координат электропривода в определенный момент времени при переходном режиме.
Классификация
Электрические приводы обычно классифицируются по различным параметрам и свойствам, присущим им. Рассмотрим основные из них.
По виду движения:
- Вращательные.
- Поступательные.
- Реверсивные.
- Возвратно-поступательные.
По принципу регулирования:
- Нерегулируемый.
- Регулируемый.
- Следящий.
- Программно управляемый.
- Адаптивный. Автоматически создает оптимальный режим при изменении условий.
- Позиционный.
По виду передаточного устройства:
- Редукторный.
- Безредукторный.
- Электрогидравлический.
- Магнитогидродинамический.
По виду преобразовательного устройства:
- Вентильный. Преобразователем является транзистор или тиристор.
- Выпрямитель-двигатель. Преобразователем является выпрямитель напряжения.
- Частотный преобразователь-двигатель. Преобразователем является регулируемый частотник.
- Генератор-двигатель.
- Магнитный усилитель-двигатель.
По методу передачи энергии:
- Групповой . От одного мотора через трансмиссию приводятся в движение другие исполнительные органы рабочих машин. В таком приводе очень сложное устройство кинематической цепи. Электрические приводы такого вида являются неэкономичными из-за их сложной эксплуатации и автоматизации. Поэтому такой привод сегодня не нашел широкого применения.
- Индивидуальный . Он характерен наличием у каждого исполнительного органа отдельного электродвигателя. Такой привод является одним из основных на сегодняшний день, так как кинематическая передача имеет простое устройство, улучшены условия техобслуживания и автоматизации. Индивидуальный привод нашел популярность в современных механизмах: сложных станках, роботах-манипуляторах, подъемных машинах.
- Взаимосвязанный . Такой привод имеет несколько связанных электроприводов. При их функционировании поддерживается соотношение скоростей и нагрузок, а также положение органов машин. Взаимосвязанные электрические приводы необходимы по соображениям технологии и устройству. Для примера можно назвать привод ленточного конвейера, механизма поворота экскаватора, или шестерни винтового пресса большой мощности. Для постоянного соотношения скоростей без механической связи применяется схема электрической связи нескольких двигателей. Такая схема получила название схемы электрического вала. Такой привод используется в сложных станках, устройствах разводных мостов.
По уровню автоматизации:
- Автоматизированные.
- Неавтоматизированные.
- Автоматические.
По роду тока:
- Постоянного тока.
- Переменного тока.
По важности операций:
- Главный привод.
- Вспомогательный привод.
Подбор электродвигателя
Чтобы приводы производили качественную работу, необходимо правильно выбрать электрический двигатель. Это создаст условия долгой и надежной работы, а также повысит эффективность производства.
При подборе электродвигателя для привода агрегатов целесообразно следовать некоторым советам по:
- Требованиям технологического процесса выбирают двигатель с соответствующими характеристиками, конструктивного исполнения, а также метода фиксации и монтажа.
- Соображениям экономии подбирают надежный, экономичный и простой двигатель, который не нуждается в больших расходах на эксплуатацию, имеет малый вес, низкую цену и небольшие размеры.
- Условиям внешней среды и безопасности подбирают соответствующее исполнение мотора.
Правильный подбор электродвигателя обуславливает технико-экономические свойства всего привода, его надежность и длительный срок работы.
Преимущества
- Возможность более точного подбора мощности двигателя для электропривода.
- Электрический мотор менее пожароопасен в отличие от других типов двигателей.
- Приводы дают возможность быстрого пуска и остановки механизма, его плавного торможения.
- Нет необходимости в специальных регуляторах питания для электродвигателя. Все процессы происходят в автоматическом режиме.
- Приводы дают возможность подбора мотора, свойства которого лучше других моделей сочетаются с характеристиками агрегата.
- С помощью электрического привода можно плавно регулировать обороты механизма в определенных пределах.
- Электродвигатель может преодолеть большие и долговременные перегрузки.
- Электропривод дает возможность получения максимальной скорости и производительности рабочего механизма.
- Электродвигатель дает возможность экономить электричество, а при определенных условиях даже генерировать ее в сеть.
- Полная и простая автоматизация установок и механизмов возможна только с помощью электроприводов.
- КПД электромоторов имеет наибольший показатель по сравнения с другими моделями двигателей.
- Моторы производят с повышенной уравновешенностью. Это дает возможность встраивания их в механизмы машин, делать менее массивным фундамент.
Инновационные электрические приводы все автоматизированы. Системы управления приводом дают возможность рационального построения технологических процессов, увеличить производительность и эффективность труда, оптимизировать качество продукции и уменьшить ее цену.
Технические требования
К любым техническим механизмам и агрегатам предъявляются определенные требования технического плана. Не стали исключением и электроприводы. Рассмотрим основные предъявляемые к ним требования.
Надежность
В соответствии с этим требованием привод должен исполнять определенные функции и заданных условиях в течение некоторого интервала времени, с расчетной вероятностью работы без возникновения неисправностей.
При невыполнении этих требований остальные свойства оказываются бесполезными. Надежность может значительно отличаться в зависимости от характера работы. В некоторых механизмах не требуется долгого времени работы, однако отказ механизма не должен иметь место. Такой пример можно найти в военной промышленности. И другой пример, где наоборот, время службы должно быть большим, а отказ устройства вполне возможен, и не приведет к серьезным последствиям.
Точность
Это требование связано с отличием показателей от заданных. Они не могут превышать допустимые величины. Электроприводы должны обеспечивать перемещение рабочего элемента на определенный угол или за некоторое время, а также поддерживать на определенном уровне скорость, ускорение или момент вращения.
Быстродействие
Это качество привода обеспечивает быструю реакцию на разные воздействия управления. Быстродействие связано с точностью.
Качество
Такая характеристика обеспечивает качество процессов перехода, исполнение определенных закономерностей их выполнения. Качественные требования создаются вследствие особенностей работы машин с электроприводами.
Энергетическая эффективность
Любые производственные процессы преобразования и передачи имеют потери энергии. Наиболее важным это качество стало в применении электроприводов механизмов, приводах значительной мощности, долгим режимом эксплуатации. Эффективность использования энергии определяется КПД.
Совместимость
Электрические приводы должны совмещаться с работой аппаратуры, в которой они применяются, с их системой снабжения электроэнергией, информационными данными, а также с рабочими элементами. Наиболее остро стоит требование совместимости электроприводов для медицинской и бытовой техники, в радиотехнике.