Способы поворота и принцип работы рулевого управления тракторов и автомобилей
Управляемость машины это способность ее двигаться точно по задаваемой траектории при условии минимальных физических и психологических нагрузок на водителя. Понятие управляемости включает в себя свойства курсовой устойчивости (способность изменять направление движения по заданной траектории при соответствующем воздействии на орган управления).
Существуют следующие способы поворота колесных тракторов и автомобилей:
- поворот всех колес или только передних управляемых
- излом шарнирно-сочлененной рамы машины
- создание разности вращающих моментов на ведущих колесах
- бортовой способ поворота по принципу гусеничных машин
- комбинированный способ, сочетающий первый и третий способы поворота
Автомобили и большинство тракторов поворачивают, изменяя направление движения передних колес, а тракторы Т-150К, К-701 — в результате поворота одной части рамы относительно другой вокруг соединяющего их вертикального шарнира.
Рулевое управление классифицируют по следующим признакам:
- по расположению на машине — с левым или правым расположением
- по конструкции рулевого механизма — червячные, реечные, кривошипно-винтовые, комбинированные и др.
- по конструктивным особенностям рулевого привода — привод к управляемым колесам и управляемым осям или к складывающимся полурамам
Рулевое управление должно быть легким и удобным, для чего усилие на рулевом колесе и угол его поворота должны быть ограниченными. Кроме того, необходимо, чтобы рулевое управление обеспечивало правильную кинематику поворота и безопасность движения, а поворот колес происходил так, чтобы их качение не вызывало проскальзывания. Это обеспечивается соединением рулевого управления в форме трапеции.
К рулевому управлению предъявляют следующие требования:
- Обеспечение высокой маневренности, при которой возможны крутые и быстрые повороты на сравнительно ограниченных площадях.
- Легкость управления, оцениваемая усилием, прилагаемым к рулевому колесу.
- Высокая степень надежности действия, поскольку выход рулевого управления из строя в большинстве случаев заканчивается аварией или катастрофой.
- Правильная кинематика поворота, при которой колеса всех осей автомобиля катятся по концентрическим окружностям (невыполнение этого требования приводит к скольжению шин по дороге, интенсивному их изнашиванию, излишним расходам мощности двигателя и топлива).
- Умеренное ощущение толчков на рулевом колесе при езде по плохим дорогам, что снижает безопасность движения.
- Точность следящего действия, в первую очередь кинематического, при котором любому заданному положению рулевого колеса будет соответствовать вполне определенная заранее рассчитанная крутизна поворота.
- Отсутствие в рулевом управлении больших зазоров, приводящих к плохому держанию автомобилем дороги, к его вилянию.
Рулевое управление машины с передними управляемыми колесами состоит из переднего моста, трапеции управления, рулевого привода и рулевого механизма (рисунок а). Передние колеса устанавливают на цапфах 13, соединенных с передней осью шкворнями. Все это образует передний мост.
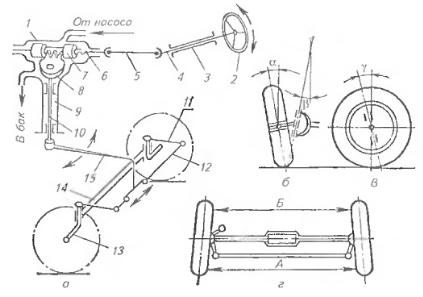
Рисунок. Схемы рулевого управления и установки передних колес: а — схема рулевого управления: 1 — гидроусилитель; 2 — рулевое колесо; 3 — рулевая колонка; 4 — вал рулевого механизма; 5 — карданная передача; 6 — винт гидроусилителя; 7 — поршень-рейка; 8 — зубчатый сектор; 9 — стойки; 10- вал сошки; 11 — поворотный рычаг; 12 — поперечная тяга; 13 — поворотная цапфа; 14 — передняя ось; 15 — рулевая сошка; б — развал колес и поперечный наклон шкворня; в — продольный наклон шкворня; г — схождение колес
На цапфах закреплены рычаги 11, связанные шарнирно с поперечными тягами 12, Рычаги 11 и поперечные тяги 12 с передней осью 14 составляют трапецию управления, предназначенную для поворота колес.
Тяги 22 соединены с рулевой сошкой 15, сидящей на валу 10 с закрепленным на нем зубчатым сектором 8. Рулевая сошка и вал 10 образуют рулевой привод, передающий усилие от сошки к поворотным цапфам.
Зубчатый сектор 8 находится в зацеплении с поршнем-рейкой 7, укрепленной на винте 6 гидроусилителя, и образует рулевой механизм. Действие рулевого механизма облегчается гидравлическим усилителем. Усилие к рулевому механизму передается от рулевого колеса 2, сидящего на валу 4, через карданную передачу 5 на винт 6.
В рулевых механизмах применяют передачи типа червяк ролик, червяк — сектор, червяк — червячная шестерня и др. Передачи первого типа наиболее распространены в рулевых механизмах тракторов и грузовых автомобилей.
На отечественных автомобилях принято левое (по ходу) рулевое управление, обеспечивающее лучший обзор. У тракторов рулевое управление расположено справа, благодаря чему создаются условия для лучшего наблюдения за работой агрегата и более точного его вождения при выполнении ряда технологических операций (пахота, косьба и т. д.).
С целью облегчения управления трактором или автомобилем применяют усилители рулевого управления преимущественно гидравлического типа (в тракторах К-701, Т-150К, МТЗ-80, ЛТЗ-55, в автомобиле ЗИЛ-130).
Управляемые (направляющие) колеса трактора (автомобиля) должны быть установлены правильно, чтобы износы шин и затраты мощности на качение были наименьшими, устойчивость — хорошей, а управление — легким. Установка управляемых (передних) колес характеризуется их развалом в вертикальной плоскости и схождением в горизонтальной, а также наклоном шкворней поворотных цапф в продольной и поперечной плоскостях.
Развал колес (рисунок б) определяется установкой цапф колес с наклоном их шипов вниз. Это позволяет уменьшить нагрузки на внешний подшипник и улучшить управляемость. Угол развала колес различных машин а
Устройство и виды рулевого управления автомобиля
Рулевое управление – одна из основных систем автомобиля, которая представляет собой совокупность узлов и механизмов, предназначенных для синхронизации положения рулевого колеса (руля) и угла поворота управляемых колес (в большинстве моделей автомобилей это передние колеса). Основное назначение рулевого управления для любых транспортных средств – это обеспечение поворота и поддержание заданного водителем направления движения.
Устройство системы рулевого управления
Конструктивно система рулевого управления состоит из следующих элементов:
- Рулевое колесо (руль) – предназначено для управления водителем с целью указания направления движения автомобиля. В современных моделях оно дополнительно оснащается кнопками управления мультимедийной системой. Также в рулевое колесо встраивается передняя подушка безопасности водителя.
- Рулевая колонка – выполняет передачу усилия от руля к рулевому механизму. Она представляет собой вал с шарнирными соединениями. Для обеспечения безопасности и защиты от угона колонка может быть оснащена электрическими или механическими системами складывания и блокировки. Дополнительно на рулевой колонке устанавливается замок зажигания, органы управления светотехникой и стеклоочистителем ветрового стекла автомобиля.
- Рулевой механизм – выполняет преобразование усилия, создаваемого водителем через поворот рулевого колеса и передает его приводу колес. Конструктивно представляет собой редуктор с некоторым передаточным отношением. Сам механизм соединяет с рулевой колонкой карданный вал рулевого управления.
- Рулевой привод – состоит из рулевых тяг, наконечников и рычагов, выполняющих передачу усилия от рулевого механизма к поворотным кулакам ведущих колес.
- Усилитель рулевого управления – повышает усилие, которое передается от руля к приводу.
- Дополнительные элементы (амортизатор рулевого управления или “демпфер”, электронные системы).
Стоит также отметить, что подвеска и рулевое управление автомобиля имеют тесную взаимосвязь. Жесткость и высота первой определяют степень отклика автомобиля на вращение рулевого колеса.
Виды рулевого управления
В зависимости от типа редуктора системы, рулевой механизм (система рулевого управления) может быть следующих видов:
- Реечный – самый распространенный вид, используемый в легковых автомобилях. Этот вид рулевого механизма имеет простую конструкцию и отличается высоким КПД. Недостатки заключаются в том, что этот тип механизма чувствителен к возникающим ударным нагрузкам при эксплуатации в сложных дорожных условиях.
- Червячный – обеспечивает хорошую маневренность автомобиля и достаточно большой угол поворота колес. Этот вид механизма меньше подвержен влиянию ударной нагрузки, но более дорогостоящий в изготовлении.
- Винтовой – принцип работы похож на червячный механизм, однако он имеет более высокий КПД и позволяет создавать большие усилия.
В зависимости от вида усилителя, который предусматривает устройство рулевого управления, различают системы:
- С гидравлическим усилителем (ГУР). Его основным достоинством является компактность и простота конструкции. Гидравлическое рулевое управление среди современных транспортных средств является одним из наиболее распространенных. Недостатком такой системы является необходимость контроля уровня рабочей жидкости.
- С электрическим усилителем (ЭУР). Такая система рулевого управления с усилителем считается наиболее прогрессивной. Он обеспечивает простоту регулировки настроек управления, высокую надежность работы, экономный расход топлива и возможность управления автомобилем без участия водителя.
- С электрогидравлическим усилителем (ЭГУР). Принцип действия данной системы аналогичен системе с гидравлическим усилителем. Главное отличие заключается в том, что насос усилителя приводится в действие электродвигателем, а не ДВС.
Рулевое управление современного автомобиля может быть дополнено следующими системами:
- Активного рулевого управления (AFS) – система изменяет величину передаточного отношения в зависимости от текущей скорости. Она позволяет корректировать угол поворота колес и обеспечивает более безопасное и устойчивое движение на скользких поверхностях.
- Динамического рулевого управления – работает аналогично активной системе, однако в конструкции в этом случае вместо планетарного редуктора используется электродвигатель.
- Адаптивного рулевого управления для транспортных средств – главной особенностью является отсутствие жесткой связи между рулем автомобиля и его колесами.
Требования к рулевому управлению автомобиля
Согласно стандарту, к рулевому управлению применяются следующие основные требования:
- Обеспечение заданной траектории движения с необходимыми параметрами поворотливости, поворачиваемости и устойчивости.
- Усилие на рулевом колесе для осуществления маневра не должно превышать нормированного значения.
- Суммарное число оборотов руля от среднего положения до каждого из крайних не должно превышать установленного значения.
- При выходе из строя усилителя должна сохраняться возможность управления автомобилем.
Существует еще один стандартный параметр, определяющий нормальное функционирование рулевого управления – это суммарный люфт. Данный параметр представляет собой величину угла поворота руля до начала поворота управляемых колес.
Значение допустимого суммарного люфта в рулевом управлении должно быть в пределах:
- 10° для легковых автомобилей и микроавтобусов;
- 20° для автобусов и подобных транспортных средств;
- 25° для грузовых автомобилей.
Особенности правостороннего и левостороннего руля
В современных автомобилях может быть предусмотрено правостороннее или левостороннее рулевое управление, что зависит от вида транспортного средства и законодательства отдельных стран. В зависимости от этого руль может располагаться справа (при левостороннем движении) или слева (при правостороннем).
В большинстве стран левостороннее рулевое управление (или правостороннее движение). Основное отличие механизмов не только в позиции руля, но и в рулевом редукторе, который адаптирован под различные стороны подключения. С другой стороны, переоборудование правостороннего руля на левостороннее рулевое управление все же возможно.
В некоторых видах спецтехники, например, в тракторах, предусматривается гидрообъемное рулевое управление, которое обеспечивает независимость положения руля от компоновки других элементов. В этой системе отсутствует механическая связь привода и рулевого колеса. Для выполнения поворота колес гидрообъемное рулевое управление предусматривает силовой цилиндр, которым управляет насос-дозатор.
Основные достоинства, которые имеет гидрообъемное рулевое управление для транспортных средств в сравнении с классическим рулевым механизмом с гидравлическим усилителем: необходимость приложения меньших усилий для выполнения поворота, отсутствие люфта, а также возможность произвольного расположения узлов системы.
Таким образом, ГОРУ может обеспечивать и правостороннее, и левостороннее рулевое управление. Это позволяет его устанавливать в транспортных средствах с особыми режимами эксплуатации (дорожно-строительные машины, уборщики).
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
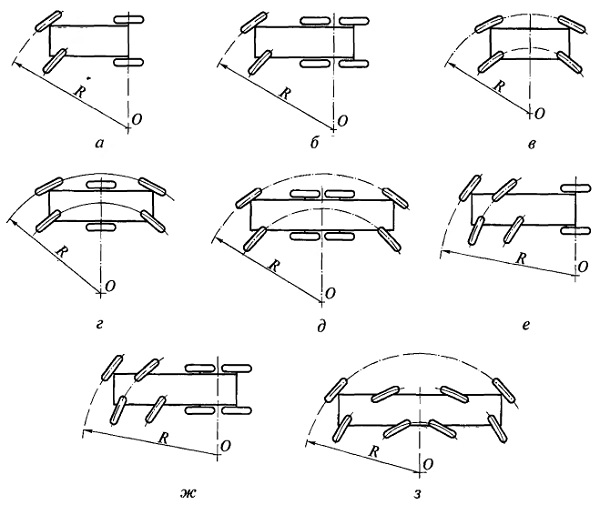
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
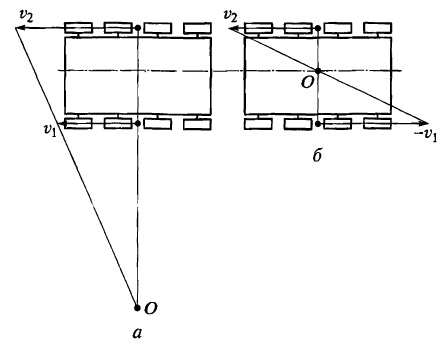
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.