Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя.
Общее устройство (Inrunner, Outrunner)
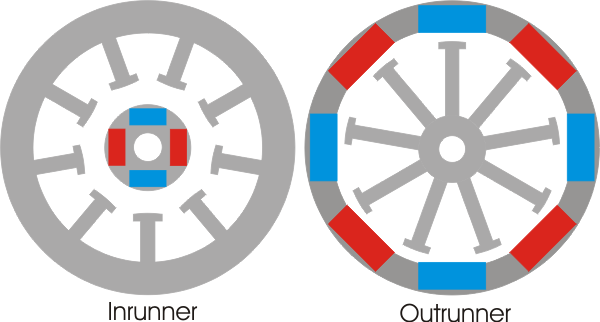
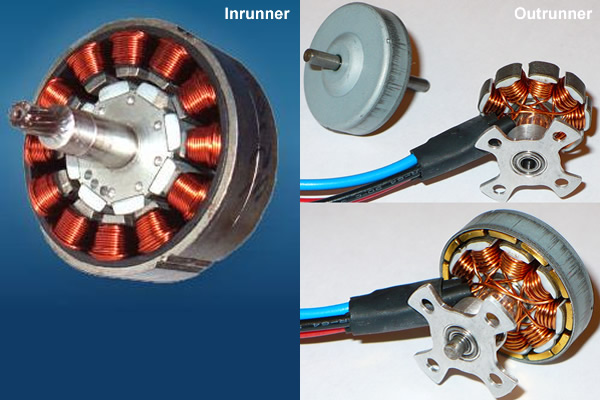
Схему Inrunner обычно применяют для высокооборотистых двигателей с небольшим количеством полюсов. Outrunner при необходимости получить высокомоментный двигатель со сравнительно небольшими оборотами. Конструктивно Inrunners проще из за того, что неподвижный статор может служить корпусом. К нему могут быть смонтированы крепежные приспособления. В случае Outrunners вращается вся внешняя часть. Крепеж двигателя осуществляется за неподвижную ось либо детали статора. В случае мотор-колеса крепление осуществляется за неподвижную ось статора, провода заводятся к статору через полую ось.

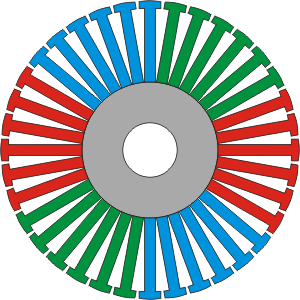
Магниты и полюса
Количество магнитов не всегда соответствует количеству полюсов. Несколько магнитов могут формировать один полюс:
В этом случае 8 магнитов формируют 4 полюса. Размер магнитов зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу.
Магниты на роторе закрепляются с помощью специального клея. Реже встречаются конструкции с держателем магнитов. Материал ротора может быть магнитопроводящим (стальным), немагнитопроводящим (алюминиевые сплавы, пластики и т.п.), комбинированным.
Обмотки и зубья

Количество зубьев статора должно делиться на количество фаз. т.е. для трехфазного бесколлекторного двигателя количество зубьев статора должно делиться на 3. Количество зубьев статора может быть как больше так и меньше количества полюсов на роторе. Например существуют моторы со схемами: 9 зубьев/12 магнитов; 51 зуб/46 магнитов.
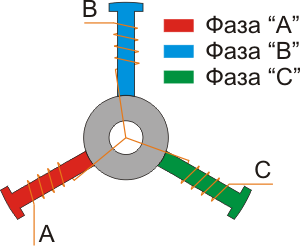
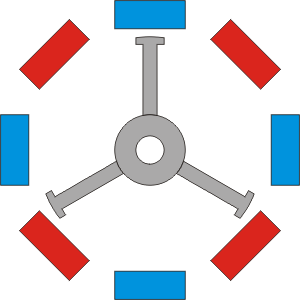
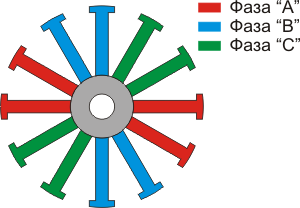
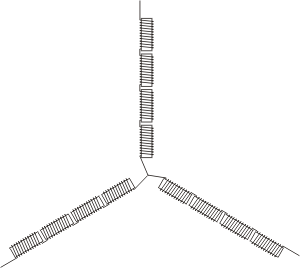
Двигателя с 3-х зубым статором применяют крайне редко. Поскольку в каждый момент времени работает только две фазы (при включении звездой), магнитные силы воздействуют на ротор не равномерно по всей окружности (см. рис.).
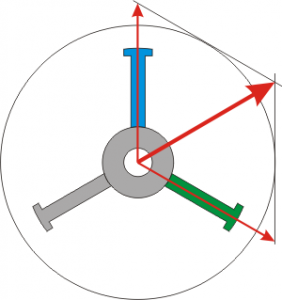
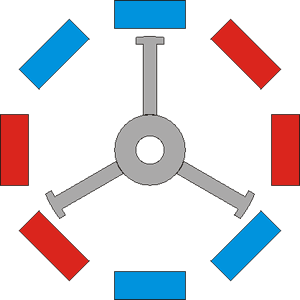
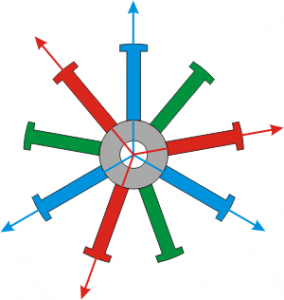
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее.
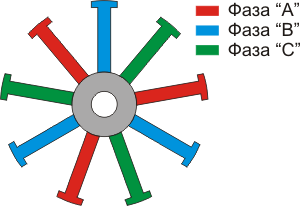
В этом случае магнитные силы, воздействующие на ротор, компенсируют друг друга. Дисбаланса не возникает.
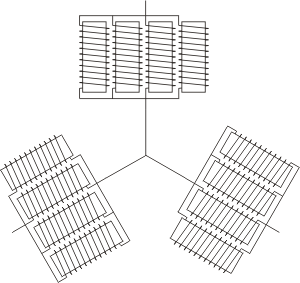
Варианты распределения обмоток фаз по зубьям статора
Вариант обмотки на 9 зубов
 Вариант обмотки на 12 зубов
Вариант обмотки на 12 зубов
В приведенных схемах число зубов выбрано таким образом, чтобы оно делилось не только на 3. Например, при 36 зубьях приходится 12 зубьев на одну фазу. 12 зубьев можно распределить так:
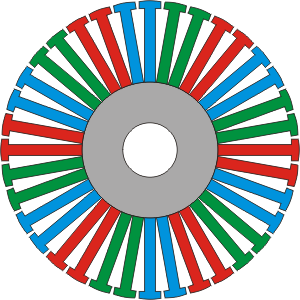 6 групп по 2 зуба
6 групп по 2 зуба
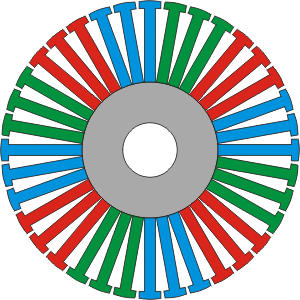 4 группы по 3 зуба
4 группы по 3 зуба
 3 группы по 4 зуба
3 группы по 4 зуба
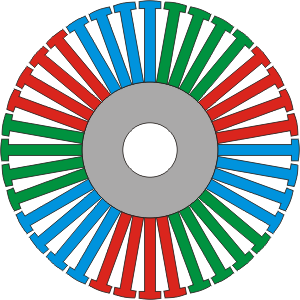
 2 группы по 6 зубьев
2 группы по 6 зубьев
Наиболее предпочтительна схема 6 групп по 2 зуба.
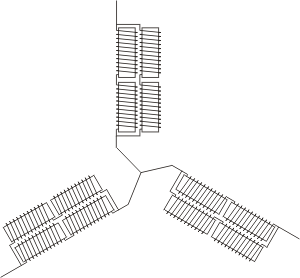
Существует двигатель с 51 зубом на статоре! 17 зубов на одну фазу. 17 — это простое число, оно нацело делится только на 1 и на само себя. Как же распределить обмотку по зубьям? Увы, но я не смог найти в литературе примеров и методик, которые помогли бы решить эту задачу. Оказалось, что обмотка распределялась следующим образом:
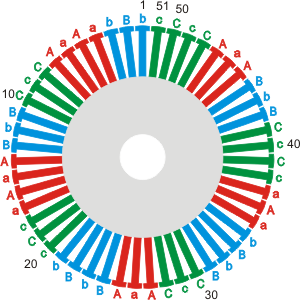
Рассмотрим реальную схему обмотки.
Обратите внимание, что обмотка имеет разные направления намотки на разных зубьях. Разные направления намотки обозначаются прописными и заглавными буквами. Детально о проектировании обмоток можно прочитать в литературе, предложенной в конце статьи.
Классическая обмотка выполняется одним проводом для одной фазы. Т.е. все обмотки на зубьях одной фазы соединены последовательно.
Обмотки зубьев могут соединяться и параллельно.
Так же могут быть комбинированные включения
Параллельное и комбинированное включение позволяет уменьшить индуктивность обмотки, что приводит к увеличению тока статора (следовательно и мощности) и скорости вращения двигателя.
Обороты электрические и реальные
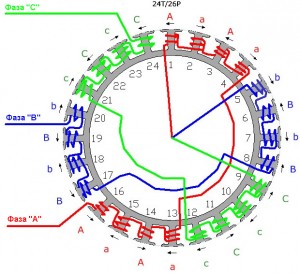
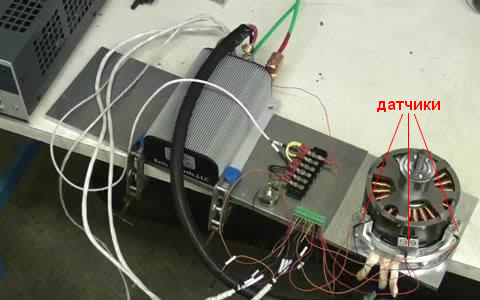
Датчики положения
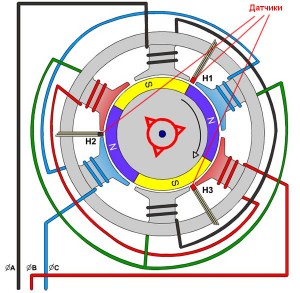
Имеется в виду «электрических» градусов. Т.е. для многополюсного двигателя физическое расположение датчиков может быть таким:

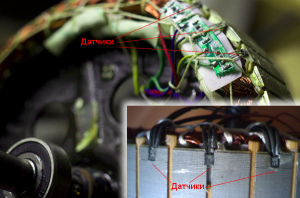
Иногда датчики располагают снаружи двигателя. Вот один из примеров расположения датчиков. На самом деле это был двигатель без датчиков. Таким простым способом его оснастили датчиками холла.
На некоторых двигателях датчики устанавливают на специальном устройстве, которое позволяет перемещать датчики в определенных пределах. С помощью такого устройства устанавливается угол опережения (timing). Однако, если двигатель требует реверса (вращения в обратную сторону) потребуется второй комплект датчиков, настроенных на обратный ход. Поскольку timing не имеет решающего значения при старте и низких оборотах, можно установить датчики в нулевую точку, а угол опережения корректировать программно, когда двигатель начнет вращаться.
Основные характеристики двигателя
Звезда и Треугольник
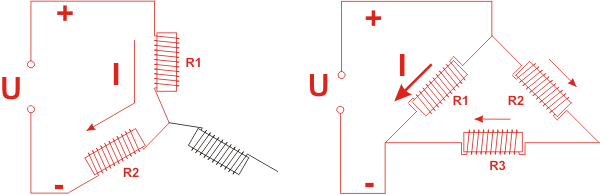
При включении звездой ток протекает через две обмотки. Результирующее сопротивление равно сумме сопротивлений двух обмоток R=R1+R2. Соответственно максимально возможный ток, протекаемый через обмотки I=U/(R1+R2). Потребляемая мощность P=U*I Предположим, что напряжение 10 В, а сопротивление обмотки 1 ОМ. Тогда ток I=10/(1+1)=5А. Потребляемая мощность P=10*5=50 Вт.
При включении треугольником ток протекает через все обмотки. Результирующее сопротивление обмоток R=(R1*(R2+R3))/(R1+R2+R3). Соответственно, максимально возможный ток, протекаемый через обмотки I=U/((R1*(R2+R3))/(R1+R2+R3)
При таком же напряжении и сопротивлении обмоток получаем ток I=10/((1*(1+1))/(1+1+1))=15А. Потребляемая мощность P=10*15=150 Вт.
При включении треугольником вырастают и обороты двигателя. Обмотки двигателя соединенные треугольником греются больше, чем при включении звездой.
Очевидно, что простым переключением обмотки с звезды в треугольник можно получить двигатель с совершенно другими характеристиками.
В высокомоментных двигателях с длительным режимом включения целесообразно применять звезду. В двигателях, работающих в кратковременном режиме, требующих более высоких оборотов, целесообразно применять треугольник.
Иногда в электротранспорте старт и разгон выполняется при включении обмоток звездой (так как это включение обеспечивает высокий момент на валу, но меньшие обороты), после разгона выполняется переключение в треугольник (обороты выше, момент меньше). Это позволяет увеличить диапазон оборотов двигателя, сохранив стартовые характеристики.
В следующей статье будет рассмотрен алгоритм управления бесколлекторными двигателями.
Устройство и принцип работы двигателя на постоянных магнитах
Двигатели на протяжении многих лет используются для преобразования электрической энергии в механическую различного типа. Эта особенность определяет столь высокую его популярность: обрабатывающие станки, конвейеры, некоторые бытовые приборы – электродвигатели различного типа и мощности, габаритных размеров используются повсеместно.

Основные показатели работы определяют то, какой тип конструкции имеет двигатель. Существует несколько разновидностей, некоторые пользуются популярностью, другие не оправдывают сложность подключения, высокую стоимость.
Двигатель на постоянных магнитах используют реже, чем асинхронный вариант исполнения. Для того, чтобы оценить возможности этого варианта исполнения, следует рассмотреть особенности конструкции, эксплуатационные качества и многое другое.
Устройство

Электродвигатель на постоянных магнитах не сильно отличается по виду конструкции.
При этом, можно выделить следующие основные элементы:
- Снаружи используется электротехническая сталь, из которой изготавливается сердечник статора.
- Затем идет стержневая обмотка.
- Ступица ротора и за ней специальная пластина.
- Затем, изготовленные из электротехнической стали, секции редечника ротора.
- Постоянные магниты являются частью ротора.
- Конструкцию завершает опорный подшипник.
Как любой вращающийся электродвигатель, рассматриваемый вариант исполнения состоит из неподвижного статора и подвижного ротора, которые при подаче электроэнергии взаимодействую между собой. Отличие рассматриваемого варианта исполнения можно назвать наличие ротора, в конструкцию которого включены магниты постоянного типа.
Принцип работы

Принцип работы рассматриваемого варианта исполнения основан на создании центробежной силы за счет магнитного поля, которое создается при помощи обмотки. Стоит отметить, что работа синхронного электродвигателя схожа с работой трехфазного асинхронного двигателя.
К основным моментам можно отнести:
- Создаваемое магнитное поле ротора вступает во взаимодействие с подаваемым током на обмотку статора.
- Закон Ампера определяет создание крутящего момента, который и заставляет выходной вал вращаться вместе с ротором.
- Магнитное поле создается установленными магнитами.
- Синхронная скорость вращения ротора с создаваемым полем статора определяет сцепление полюса магнитного поля статора с ротором. По этой причине, рассматриваемый двигатель нельзя использовать в трехфазной сети напрямую.
В данном случае, нужно в обязательном порядке устанавливать специальный блок управления.
 В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
По типу установки ротора, можно выделить следующие типы конструкции:
- С внутренней установкой – наиболее распространенный тип расположения.
- С внешней установкой или электродвигатель обращенного типа.
Постоянные магниты включены в конструкцию ротора. Их изготавливают из материала с высокой коэрцитивной силой.
Эта особенность определяет наличие следующих конструкций ротора:
- Со слабо выраженным магнитным полюсом.
- С ярко выраженным полюсом.
Кроме этого, конструкция ротора может быть следующего типа:
- Поверхностная установка магнитов.
- Встроенное расположение магнитов.
Кроме ротора, также следует обратить внимание и на статор.
По типу конструкции статора, можно разделить электродвигатели на следующие категории:
- Распределенная обмотка.
- Сосредоточенная обмотка.
По форме обратной обмотке, можно провести нижеприведенную классификацию:
- Синусоида.
- Трапецеидальная.
Подобная классификация оказывает влияние на работу электродвигателя.
Преимущества и недостатки
Рассматриваемый вариант исполнения имеет следующие достоинства:
- Оптимальный режим работы можно получить при воздействии реактивной энергии, что возможно при автоматической регулировке тока. Эта особенность обуславливает возможность работы электродвигателя без потребления и отдачи реактивной энергии в сеть. В отличие от асинхронного двигателя, синхронный имеет небольшие габаритные размеры при той же мощности, но при этом КПД значительно выше.
- Колебания напряжения в сети в меньшей степени воздействую на синхронный двигатель. Максимальный момент пропорционален напряжению сети.
- Высокая перегрузочная способность. Путем повышения тока возбуждения, можно провести значительное повышение перегрузочной способности. Это происходит на момент резкого и кратковременного возникновения дополнительной нагрузки на выходном валу.
- Скорость вращения выходного вала остается неизменной при любой нагрузке, если она не превышает показатель перегрузочной способности.
К недостаткам рассматриваемой конструкции можно отнести более сложную конструкцию и вследствие этого более высокую стоимость, чем у асинхронных двигателей. Однако в некоторых случаях, обойтись без данного типа электродвигателя невозможно.
Как сделать своими руками?

Провести создание электродвигателя своими руками можно только при наличии знаний в области электротехнике и наличия определенного опыта. Конструкция синхронного варианта исполнения должна быть высокоточной для исключения возникновения потерь и правильности работы системы.
 Зная то, как должна выглядеть конструкция, проводим следующую работу:
Зная то, как должна выглядеть конструкция, проводим следующую работу:
- Создается или подбирается выходной вал. Он не должен иметь отклонений или других дефектов. В противном случае, возникающая нагрузка может привести к искривлению вала.
- Наибольшей популярностью пользуются конструкции, когда обмотка находится снаружи. На посадочное место вала устанавливается статор, который имеет постоянные магниты. На валу должно быть предусмотрено место для шпонки для предотвращения прокручивания вала при возникновении серьезной нагрузки.
- Ротор представлен сердечником с обмоткой. Создать самостоятельно ротор достаточно сложно. Как правило, он неподвижен, крепится к корпусу.
- Механической связи между статором и ротором нет, так как в противном случае, при вращении будет создавать дополнительная нагрузка.
- Вал, на котором крепится статор, также имеет посадочные места для подшипников. В корпусе имеется посадочные места для подшипников.
Электродвигатели имеют сложную конструкцию, питание от сети 220 Вольт обуславливает соблюдение определенных норм при их создании. Именно поэтому, для того, чтобы быть уверенным в надежной работе подобного механизма, следует покупать варианты исполнения, созданные на заводах по выпуску подобного оборудования.
В научных целях, к примеру, в лаборатории для проведения испытаний по работе магнитного поля часто создают собственные двигатели. Однако они имеют небольшую мощность, питаются от незначительно напряжения и не могут быть применены в производстве.
Рекомендации

Выбор рассматриваемого электродвигателя следует проводить с учетом следующих особенностей:
- Мощность – основной показатель, который влияет на срок службы. При возникновении нагрузки, которая превосходит возможности электродвигателя, он начинает перегреваться. При сильной нагрузке, возможно искривление вала и нарушение целостности других компонентов системы. Поэтому следует помнить о том, что диаметр вала и другие показатели выбираются в зависимости от мощности двигателя.
- Наличие системы охлаждения. Обычно особого внимания на то, как проводится охлаждение, никто не уделяет. Однако при постоянной работе оборудования, к примеру под солнцем, следует задуматься о том, что модель должна быть предназначена для продолжительной работы под нагрузкой при тяжелых условиях.
- Целостность корпуса и его вид,год выпуска – основные моменты, на которые уделяют внимание при покупке двигателя бывшего употребления. Если имеются дефекты корпуса, велика вероятность того, что конструкция имеет повреждения и внутри. Также, не стоит забывать о том, что подобное оборудование с годами теряет свой КПД.
- Особое внимание нужно уделятькорпусу, так как в некоторых случаях можно провести крепление только в определенном положении. Самостоятельно создать посадочные отверстия, приварить уши для крепления практически невозможно, так как нарушение целостности корпуса не допускается.
- Вся информация об электродвигателе находится на пластине, которая прикрепляется к корпусу. В некоторых случаях, есть только маркировка, по расшифровке которой можно узнать основные показатели работы.
В заключение отметим, что многие двигатели, которые были произведены несколько десятилетий назад, зачастую проходили восстановительные работы. От качества проведенной восстановительной работы зависят показатели электродвигателя.