Способы управления электродвигателями
Управление коллекторными электродвигателями постоянного тока
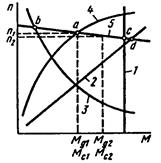
Из уравнения скорости электродвигателя постоянного тока видно, что частота вращения коллекторного электродвигателя постоянного тока напрямую связана с величиной напряжения питания прикладываемого к двигателю и момента нагрузки.

- где
 — угловая частота, рад/с,
— угловая частота, рад/с, - U — напряжение питания, В,
- – постоянная ЭДС, В∙с/рад,
- M — момент электродвигателя, Н∙м,
- — механическая жесткость двигателя.
 — угловая частота, рад/с,
— угловая частота, рад/с, – постоянная ЭДС, В∙с/рад,
– постоянная ЭДС, В∙с/рад, — механическая жесткость двигателя.
— механическая жесткость двигателя.Таким образом скорость вращения коллекторного двигателя постоянного тока изменяется посредством изменения величины напряжения питания.
Управление универсальными двигателями
Универсальный коллекторный двигатель может быть подключен как к сети постоянного тока, так и к сети переменного тока. Так же как и у коллекторного двигателя постоянного тока, скорость универсального двигателя управляется величиной напряжения питания, а не его частотой.
Управление бесщеточными электродвигателями переменного тока
Электроприводы с электродвигателем переменного тока наиболее часто используются в составе: насосов, вентиляторов, компрессоров, станков и других механизмов, для которых важно поддерживать скорость вращения вала двигателя, либо определенный технологический параметр.
Основным элементом современного электропривода является система управления электродвигателем: частотный преобразователь или сервопривод.
Преобразователь частоты позволяет управлять моментом и скоростью вращения электродвигателя и исполнительного механизма.
Сервопривод позволяет точно управлять угловым положением, скоростью и ускорением исполнительного механизма.
При этом современные высокопроизводительные методы управления двигателями переменного тока используемые в современных частотных преобразователях и в сервоприводах имеют единую концепцию управления — векторное управление.
Устройства управления электродвигателями
Устройство управления электродвигателем может включать ручные или автоматические средства для запуска и остановки двигателя, средства выбора прямого или обратного направления вращения, выбора и регулирования скорости вращения, регулирования или ограничения момента, защиту от перегрузки и от неисправности.
Каждый электродвигатель должен иметь своего рода систему управления (контроллер). Система управления электродвигателем в зависимости от задачи будет иметь различные характеристики и сложность.
Простейшим случаем управления электродвигателем является выключатель который соединяет электродвигатель с источником энергии, например как в небольших бытовых приборах или электроинструменте (дрели и др.). Переключение может осуществляться вручную, с помощью реле или контактора подсоединенного к датчику для автоматического запуска или остановки электродвигателя. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Более сложные системы управления электродвигателями могут использоваться для точного управления скорости и момента электродвигателя, могут быть частью системы для точного управления угловым положением управляемого механизма.
Устройства управления электродвигателями могут управляться вручную, удаленно или автоматически. Они могут иметь, как только функции старта и остановки двигателя, так и многие другие функции.
Устройства управления двигателями можно классифицировать по типам управляемых электродвигателей (таких как СДПМ, КДПТ и др.) или по назначению.
Аппаратура управления электродвигателями
При неавтоматическом управлении все операции с двигателями (включение, выключение, изменение скорости и направление вращения) производятся вручную обслуживающим персоналом. Для этой цели в цепи двигателей устанавливают рубильники, выключатели, контроллеры, реостаты, а для защиты от перегрева – предохранители и автоматические выключатели.
При автоматическом управлении (без участия обслуживающего персонала) применяют аппарат автоматического управления:
1) контакторы – аппараты включений и выключений, управляемые на расстоянии;
2) реле – аппараты, воздействующие на приборы управления двигателем, т.е. на контакторы, выключатели и др;
3) командоаппараты, — при помощи, которых сама производственная машина может воздействовать на первые две группы аппаратов.
| ОСНОВНЫЕ ФОРМУЛЫ R |
I.Расчет мощности двигателя при длительном режиме работы при постоянной нагрузке 1) Передаточное число механизма: i =  . 2) Мощность двигателя: Р = . 2) Мощность двигателя: Р =  ; условие Рном ≥ Р при переменной нагрузке 3) Эквивалентный момент: Мэкв = ; условие Рном ≥ Р при переменной нагрузке 3) Эквивалентный момент: Мэкв =  . 4) Требуемая мощность двигателя: Р = Мэкв × wд ном. Проверка Мmах £ Мном lм, где номинальный момент: Мном = Рном / wд ном ; Допустимая перегрузочная способность двигателя: l м = Мдоп / Мном II.Расчет мощности двигателя при кратковременном режиме работы Wп ном = (Рном / hном – Рном) tном = Рном tном (1 – hном) / hном. Проверка Мmax £ Мном lм. III.Расчет мощности двигателя при повторно-кратковременном режиме работы двигателя Продолжительность включения: ПВ = . 4) Требуемая мощность двигателя: Р = Мэкв × wд ном. Проверка Мmах £ Мном lм, где номинальный момент: Мном = Рном / wд ном ; Допустимая перегрузочная способность двигателя: l м = Мдоп / Мном II.Расчет мощности двигателя при кратковременном режиме работы Wп ном = (Рном / hном – Рном) tном = Рном tном (1 – hном) / hном. Проверка Мmax £ Мном lм. III.Расчет мощности двигателя при повторно-кратковременном режиме работы двигателя Продолжительность включения: ПВ =  × 100%. × 100%. |
| Схемы | Обозначения | Единицы измерения |
    | wд ном – предполагаемая номинальная частота вращения двигателя wм – частота вращения механизма h – КПД механизма Мм – момент сопротивления механизма Рном – номинальная мощность двигателя Р – требуемая мощность двигателя Мэкв – среднеквадратичный (эквивалентный по нагреву) момент Мmax – максимальный момент Мдоп – допустимый момент Мном – номинальный момент hном – номинальный КПД tном – номинальное (паспортное) время работы tр – время работы tп – время паузы | Н ×м Вт Вт Н ×м Н ×м Н ×м Н ×м мин мин мин |
Примеры решения задач Ë
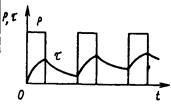
1.Выбрать электродвигатель по нагрузочной диаграмме, изображенной на рис. в виде зависимости тока от времени (график 3), а также зависимости мощности от времени (график 2).
 | Решение 1. Нагрузочная диаграмма имеет три участка: 1) I1 = 40А, t1 = 2 м 2) I2 = 30А, t2 = 3 м 3) I3 = 20А, t3 = 6 м; далее участки повторяются в том же порядке. |
2. Согласно формуле
I эк =  ,
,
I эк =  = 28 А.
= 28 А.
3. Двигатель выбирают по условию Iном ³ Iном (табл. 11.1)
| Тип двигателя | РНОМ 2, кВт | n НОМ 2, об/мин | COS j НОМ | IП / IНОМ | МП / МНОМ | ММАХ / МНОМ | hНОМ |
| 4А100S2У3 | 0,89 | 7,5 | 2,2 | 0,86 | |||
| 4А100L2У3 | 5,5 | 0,91 | 7,5 | 2,2 | 0,87 | ||
| 4A112M2CУ3 | 7,5 | 0,88 | 7,5 | 2,2 | 0,87 | ||
| 4А132М2СУ3 | 0,9 | 7,5 | 1,6 | 2,2 | 0,88 | ||
| 4А80S4У3 | 1,1 | 0,81 | 2,2 | 0,85 | |||
| 4А90L4У3 | 2,2 | 0,83 | 2,2 | 0,8 | |||
| 4А100S4У3 | 0,83 | 6,5 | 2,2 | 0,82 | |||
| 4А100L4У3 | 0,84 | 6,5 | 2,2 | 0,84 | |||
| 4А112М4СУ1 | 5,5 | 0,85 | 2,2 | 0,85 | |||
| 4А132М4СУ1 | 0,87 | 7,5 | 2,2 | 0,87 | |||
| 4АР160S4У3 | 0,83 | 7,5 | 2,2 | 0,87 | |||
| 4АР160М4У3 | 18,5 | 0,87 | 7,5 | 2,2 | 0,89 | ||
| 4АР180S4У3 | 0,87 | 7,5 | 2,2 | 0,89 | |||
| 4АР180М4У3 | 0,87 | 7,5 | 2,2 | 0,9 | |||
| 4А250S4У3 | 0,9 | 7,5 | 1,2 | 2,2 | 0,93 | ||
| 4А250М4У3 | 0,91 | 7,5 | 1,2 | 2,2 | 0,93 | ||
| 4А100L6У3 | 2,2 | 0,73 | 5,5 | 2,2 | 0,81 | ||
| 4АР160S6У3 | 0,83 | 2,2 | 0,86 | ||||
| 4АР160М6У3 | 0,83 | 2,2 | 0,88 | ||||
| 4АР180М6У3 | 18,5 | 0,8 | 6,5 | 2,2 | 0,87 |
Выбран трехфазный асинхронный двигатель с короткозамкнутым ротором.
Рном = 15 кВт, Uном = 380 В, n ном = 975 об/мин, hном = 0,88, соs jном = 0,83,
kmах =  , Iном = 30,5 А
, Iном = 30,5 А
4. Выбранный двигатель следует проверить по перегрузочной способности:
Мном = 60 Рном / (2p nном) = 60 × 15000 / (2p × 975) =150 Н×м.
Мmах дв = Мном × kном = 150 × 2,2 = 330 Н×м
5. Наибольший ток нагрузки Imах = 40А.
Рmах = 
6. Полагая, что h, соs j, а также n при изменении нагрузки изменяются мало,
Мmах нг = 60 Рmах /(2 p × nном) =  .
.
7. Сравнение показывает, что Мmах дв > М mах нг.
Вторую часть задания по графику 2 решить самостоятельно.
Контрольные вопросы 4
1. Что входит в состав электропривода?
а) электродвигатель и рабочий механизм;
б) преобразующее устройство, электродвигатель, редуктор, управляющее устройство и рабочий механизм;
в) электродвигатель, рабочий механизм и управляющее устройство.
2. Какую роль играет преобразующее устройство в электроприводе?
а) преобразует постоянное напряжение в переменное;
б) преобразует напряжение, ток или частоту напряжения.
3. Какую функцию выполняет передаточное устройство в электроприводе?
а) повышает частоту вращения вала рабочего механизма;
б) служит для изменения частоты вращения вала до значения, необходимого рабочему механизму.
4. Сколько электродвигателей входит в электропривод?
в) количество электродвигателей зависит от типа электропривода.
5. При каком режиме работы двигатель должен расчитываться на максимальную мощность?
6. Выбрать график, правильно отражающий кратковременный режим двигателя.


7. Выбрать график, правильно отражающий повторно-кратковременный режим работы двигателя.

8. Для управления, контроль работы электродвигателя применяют различную аппаратуру (рубильники, контакторы, электроизмерительные приборы и др.). Входят ли эти аппараты и приборы в состав электропривода?
Управление электродвигателем
Подписка на рассылку
В зависимости от типа и функционала конкретного привода в значительной мере меняются способы и методы управления электродвигателем. В самом простом случае это включение рубильником и работа, не подразумевающая отклика на внешние сигналы. Однако не каждый мотор можно запустить таким способом . Например, вентильные реактивные электродвигатели не запустятся без микроконтроллерного блока управления двигателем, использующего в узле коммутатора MOSFET- или IGBT-транзисторы. Реактивные синхронные двигатели в обязательном порядке работают парой с преобразователем частоты (далее – ПЧ). Если система управления двигателем такого типа построена на рациональном алгоритме, то привод способен обеспечить энергоэффективность класса IE4, но при этом имеет значительно меньшую цену, чем сопоставимые двигатели с постоянным магнитом.
Самые сложные системы управления двигателем разрабатываются для моторов среднего напряжения 3-10 кВ. Тут требуется организовать полноценную релейную защиту.
Для асинхронной машины базовыми являются:
- максимальная токовая защита;
- перегрузка;
- токовая защита от однофазного замыкания на землю;
- защита от дуговых замыканий;
- автоматическое управление выключателем;
- защита минимального напряжения.
Для синхронных двигателей добавляется защита:
- дифференциальная;
- от потери питания;
- от потери возбуждения;
- от асимметричного режима.
Раньше для управления таким двигателем требовалось несколько напольных шкафов, но теперь терминалы релейной защиты имеют весьма компактные размеры.

Самым массовым и распространённым является асинхронный электродвигатель с короткозамкнутым ротором. На его примере рассмотрим основные схемы управления двигателем:
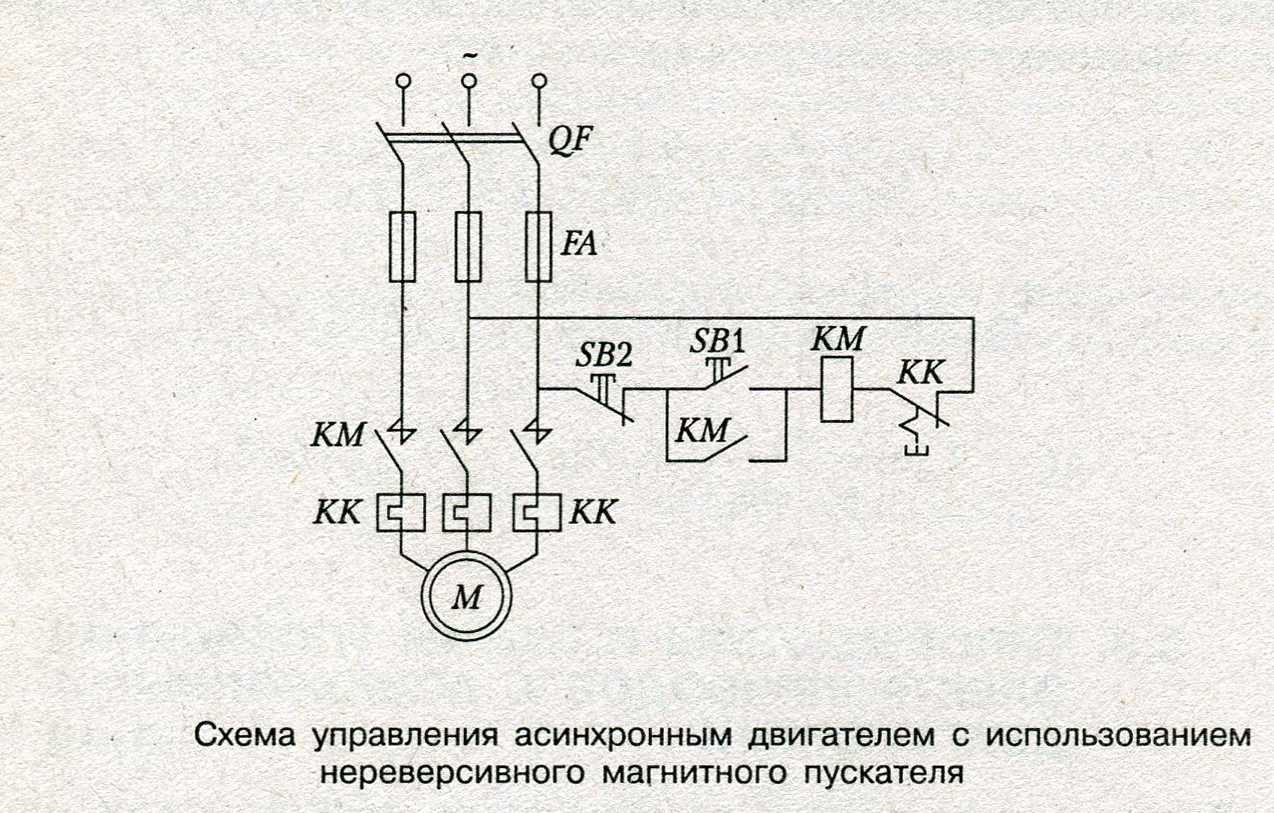
Схема предполагает наличие следующих элементов:
- автоматический выключатель (реже плавкие вставки): служит для защиты от КЗ. Тепловой расцепитель редко может обеспечить должную защиту, поэтому его функционал игнорируется и реализуется другим элементом схемы. В случае с модульными автоматами выбирают аппарат с ВТХ «D»;
- контактор/магнитный пускатель: непосредственно подаёт напряжение на устройство. В зависимости от допустимого тока бывают разных габаритов и условно делятся на 7 величин. Категория применения – АС-3 (АС-4 для реверсов и торможения противовключением). Если есть особые требования к скорости срабатывания или частоте включений, используют твердотельные реле;
- тепловое реле: устанавливается на контактор и защищает от заклинивания и неполнофазной работы. Может быть упразднено в случае использования в схеме мотор-автомата, на котором и будет настроена уставка по току;
- кнопки с НО и НЗ контактами без фиксации служат для пуска и останова. После нажатия на «Пуск» происходит шунтирование через блок-контакт пускателя и цепь фиксируется в замкнутом состоянии до нажатия на «Стоп» или исчезновения питания.
Этим реализуется самоподхват, обеспечивающий нулевую защиту.
В случае если двигатель нужно запускать в разные стороны, используют либо два пускателя, либо реверсивные пускатели. Ниже приведена реверсивная схема с тормозом:
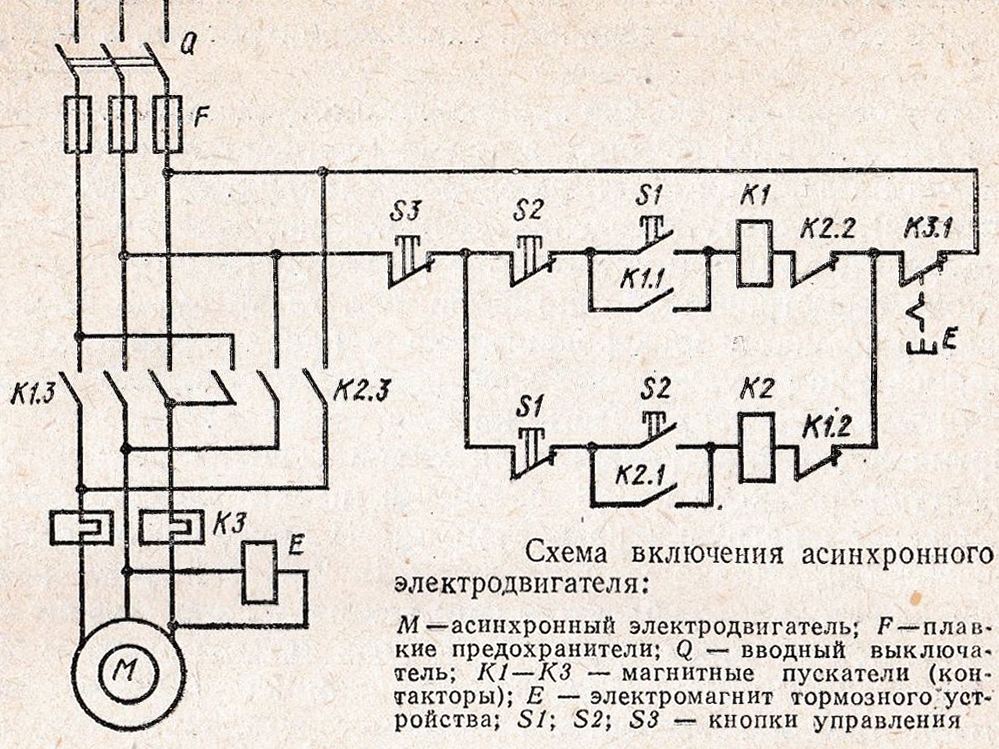
Схема для подключения двигателя с фазным ротором, используемым в подъёмных кранах, дробилках, цементных печах:
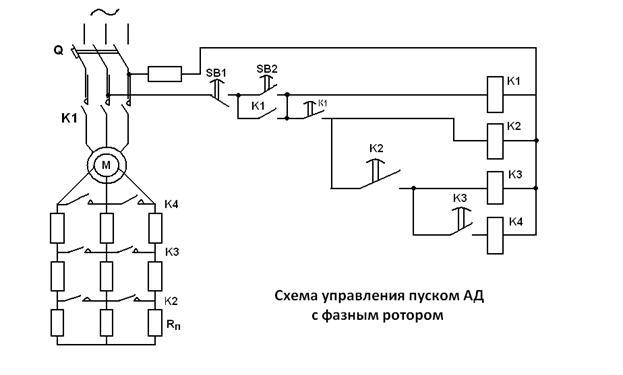
Двигатель с фазным ротором не имеет сложностей с плавным пуском и регулированием оборотов, чего нельзя сказать о машинах с короткозамкнутым ротором. Двигатели с беличьей клеткой решают эти проблемы посредством устройства плавного пуска (УПП), переключения «эвезда-треугольник», ПЧ. На испытательных стендах могут применяться индукционные регуляторы.

Помимо указанных выше деталей в системе управления двигателем могут присутствовать контрольно-измерительные приборы и элементы автоматизированной системы управления технологическим процессом (КИПиАСУТП) – разные датчики, электроконтактные манометры (ЭКМ), электроконтактные термометры (ЭКТ). Например, в схемах управления насосами датчик протока защищает от сухого хода, а реле уровня служит для автоматического наполнения ёмкостей. Это усложняет схему управления двигателем и увеличивает габариты блока управления двигателем.
При работаете от ПЧ сигналы датчиков можно заводить непосредственно в него (например, токовую петлю 4-20 мА от датчика давления, термопары, сигнал 0-5 В тахогенератора). Некоторые ПЧ и пропорционально-интегрально-дифференцирующие регуляторы в качестве обратной связи могут использовать противо-ЭДС. Важно помнить, что для двигателей, работающих от ПЧ в режимах с ПВ=100% (S1, S7, S8) с охлаждением IC411, стоит применить стороннее охлаждение. При этом рекомендуется использовать двигатели с термисторами или позисторами. Также не следует забывать, что ПЧ создают высшие гармоники и их рекомендуется использовать вместе с соответствующими сетевыми и моторными дросселями.
В случаях, когда в цепи участвует большое количество периферии, когда есть требования к скорости реагирования, при техпроцессах прецизионной точности, реализуемых на инкрементальных датчиках (энкодеры, резольверы) в системе управления используются ПЛК (программируемый логический контроллер), работающие с протоколами CAN, RS-485, RS-422. Это обеспечивает высокую скорость передачи больших объёмов данных ввиду высокой пропускной способности шин.