ГЛАВА 24. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ, НАЗНАЧЕНИЕ, КЛАССИФИКАЦИЯ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРОМЫШЛЕННЫХ РОБОТОВ
§ 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Промышленные роботы являются представителями машин-манипуляторов, которые предназначены для выполнения двигательных функций, аналогичных функциям руки человека. Манипуляторы с ручным управлением (биотехнические) управляются оператором дистанционно или непосредственно путем перемещения рабочего органа.
К автоматическим манипуляторам относятся автооператоры, промышленные роботы и интерактивные роботы.
— это неперепрограммируемый автоматический манипулятор.
(ПР) — автоматическая машина, представляющая собой совокупность манипулятора и перепрограммируемого устройства управления для выполнения в производственном процессе двигательных и управляющих функций, заменяющих аналогичные функции человека при перемещении предметов производства и (или) технологической оснастки. Перепрограммируемость — это свойство робота заменять управляющую программу автоматически или оператором.
Существуют роботы, которые попеременно управляются то оператором, то автоматически. В них имеется устройство памяти для автоматического выполнения отдельных действий.
Применение промышленных роботов в значительной степени решает вопрос развития комплексной автоматизации производства с возможностью его быстрой переналадки на выпуск нового вида продукции. ПР освобождает рабочего от неквалифицированного монотонного и вредного для здоровья труда, улучшает условия безопасности рабочих и высвобождает их для выполнения новых народнохозяйственных задач.
Применение ПР позволяет повысить производительность труда в 2-3 раза, увеличить сменность работы оборудования и улучшить ритмичность. Сегодня ПР в машиностроении выполняют погрузочно-разгрузочные, транспортно-складские работы, обслуживают станки, прессы, литейные машины и т. д., а также они могут выполнять сварочные, сборочные, контрольно-измерительные, окрасочные и другие основные операции.
Промышленные роботы широко применяют в горнодобывающей, металлургической, нефтяной и других отраслях промышленности. Их используют в медицине, в сфере обслуживания, при исследовании океанов и т. д. Во всех случаях ПР позволяют автоматизировать на их основе производство со всеми вытекающими отсюда технологическими, организационными, психологическими и социально-экономическими аспектами.
Структурная схема промышленного робота представлена на рис. 165. Исполнительное устройство ПР выполняет все его двигательные функции. В исполнительное устройство входит манипулятор и в общем случае устройство передвижения промышленного робота. Манипулятор состоит из несущих конструкций, приводов, исполнительных и передаточных механизмов. Каждая степень подвижности манипулятора имеет свой двигатель (пневматический, электрический, гидравлический). В ПР часто используют волновые и планетарные редукторы, что позволяет уменьшить объем и массу сборочной единицы при высоком коэффициенте передачи. В промышленный робот малой грузоподъемности используют традиционные зубчатые редукторы, а в тяжелых ПР — зубчатые редукторы в сочетании с винтовой парой.
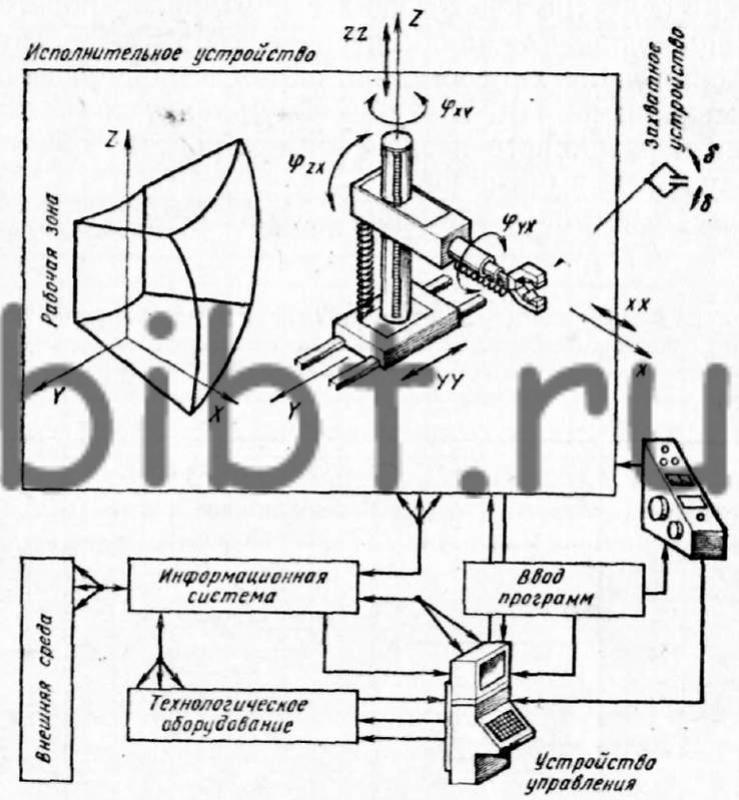
Рис. 165. Структурная схема промышленного робота
Исполнительный механизм промышленного робота (механическая рука) осуществляет ориентирующие и транспортирующие движения. Чаще всего он имеет шарнирное исполнение. Рабочим органом ПР является захватное устройство (сварочные клещи, окрасочный пистолет, сварочный инструмент и т. д.). Захватное устройство захватывает и удерживает объекты, перемещаемые манипулятором. Современные промышленные роботы комплектуют набором типовых захватных устройств.
Устройство управления ПР служит для формирования и выдачи управляющих воздействий исполнительному устройству в соответствии с управляющей программой. В устройство управления, как правило, входят: пульт управления; запоминающее устройство, в котором хранятся программы и другая информация; вычислительное устройство и блок управления приводами манипулятора и устройства передвижения. Устройство управления используют обычно и для технологического оборудования, работающего совместно с данным промышленного робота, или совместно работающих с ним других роботов.
Информационная система обеспечивает сбор и передачу в устройство управления данных о состоянии окружающей среды и функционировании механизмов ПР. В эту систему входит комплект датчиков обратной связи различного назначения, устройство обратной связи, устройство сравнения сигналов.
Некоторые элементы кинематической схемы промышленных роботов приведены в табл. 2.
2. Условные обозначения элементов схем роботов и манипуляторов
МАНИПУЛЯТОР
МАНИПУЛЯТОР — (1) механизм, позволяющий осуществлять действия, аналогичные действиям руки человека; (2) в машиностроении — сложное механическое устройство с гидравлическим или электрическим приводом, выполняющее дистанционно под управлением оператора действия (манипуляции), связанные с изменением положения тяжёлой заготовки при её подаче в валки прокатного стана или под ковочный пресс в опасных, трудных и вредных технологических производственных условиях. Автоматическая машина (в том числе с программным управлением), выполняющая аналогичные операции, называется роботом (см.); (3) в технике связи — то же, что ключ телеграфный (см. (5)), которым манипулируют при передаче электрических сигналов кодом (см.) Морзе; (4) в ядерной технике — механизм, позволяющий осуществлять в «горячей зоне» на расстоянии любые манипуляции с радиоактивными веществами (взвешивание, переливание, пересыпание, отмеривание и др.), изолированными от оператора надёжными средствами биологической защиты (см. рис.).
Большая политехническая энциклопедия. — М.: Мир и образование . Рязанцев В. Д. . 2011 .
Смотреть что такое «МАНИПУЛЯТОР» в других словарях:
Манипулятор — (лат. manipulare руководить, управлять с помощью рук). В технике Манипулятор механизм для управления положением предметов. Манипулятор внешнее устройство компьютера, предназначенное для перемещения курсора по экрану дисплея … Википедия
манипулятор — механическая рука, жонглер, гриптонг, ниптонг, артист, фокусник, робот Словарь русских синонимов. манипулятор сущ., кол во синонимов: 21 • артист (63) • … Словарь синонимов
МАНИПУЛЯТОР — 1) механизм, выполняющий под управлением оператора действия (манипуляции), аналогичные действиям руки человека. Применяются при работе в опасных или трудных условиях (напр., в горном деле, на АЭС). Автоматические манипуляторы (в т. ч. с… … Большой Энциклопедический словарь
МАНИПУЛЯТОР — МАНИПУЛЯТОР, а, муж. 1. Цирковой артист, выполняющий фокусы, основанные на ловкости рук. 2. Человек, к рый занимается манипуляциями (во 2 знач.). 3. Название нек рых механических устройств для производства сложных движений, действий, аналогичных… … Толковый словарь Ожегова
Манипулятор — устройство с ручным управлением, предназначенное для дистанционных работ с радиоактивными веществами и изделиями. Термины атомной энергетики. Концерн Росэнергоатом, 2010 … Термины атомной энергетики
манипулятор — а, м. manipulateur. 1. Лицо, производящие различные манипуляции. БАС 1. || Иногда человек совершенно не собирается умирать. А просто своей попыткой самоубийства кого то напугать, обратить на себя внимание .. Мы их называем манипуляторы. То есть… … Исторический словарь галлицизмов русского языка
МАНИПУЛЯТОР — Манипуляторы осуществляют непосредственный ввод информации, указывая курсором на экране монитора команду или место ввода данных. Манипуляторы, как правило, подключаются к последовательному порту. Используются для облегчения управления компьютером … Словарь бизнес-терминов
манипулятор — Управляемые устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом [ГОСТ 25686 85] Тематики роботы промышленные … Справочник технического переводчика
Манипулятор — 14. Манипулятор По ГОСТ 25686 85 Источник: ГОСТ 16950 81: Техника радиационно защитная. Термины и определения ориги … Словарь-справочник терминов нормативно-технической документации
манипулятор — (фр. manipulates) 1) машина, механизм для выполнения вспомогательных операций, связанных с изменением положения изделий, приборов, аппаратов в др. в камерах, доступ в которые невозможен; приспособление для работы с радиоактивными веществами; 2)… … Словарь иностранных слов русского языка
Книги
- Манипулятор, Абдуллаев Ч.. Агентство «Миллениум» в своем роде уникально: оно гарантирует успех выборов в законодательные органы любого (да-да, любого!) человека, который воспользуется их услугами. И до нынешнего… ПодробнееКупить за 491 руб
Манипулятор, Юлия Ковалькова. Это был роман о любви. О том, как 19-летняя девочка-студентка одного из лучших вузов страны влюбилась в 26-летнего аспиранта, сделавшего блестящую карьеру на телевидении. О том, как он… ПодробнееКупить за 160 руб электронная книга
Другие книги по запросу «МАНИПУЛЯТОР» >>
манипулятор
Теория механизмов и машин. Терминология: Учеб. пособие. — М.: Изд-во МГТУ им. Н.Э. Баумана . Н.И. Левитский, Ю.Я. Гуревич, В.Д. Плахтин и др.; Под ред. К.В. Фролова. . 2004 .
Смотреть что такое «манипулятор» в других словарях:
Манипулятор — (лат. manipulare руководить, управлять с помощью рук). В технике Манипулятор механизм для управления положением предметов. Манипулятор внешнее устройство компьютера, предназначенное для перемещения курсора по экрану дисплея … Википедия
манипулятор — механическая рука, жонглер, гриптонг, ниптонг, артист, фокусник, робот Словарь русских синонимов. манипулятор сущ., кол во синонимов: 21 • артист (63) • … Словарь синонимов
МАНИПУЛЯТОР — 1) механизм, выполняющий под управлением оператора действия (манипуляции), аналогичные действиям руки человека. Применяются при работе в опасных или трудных условиях (напр., в горном деле, на АЭС). Автоматические манипуляторы (в т. ч. с… … Большой Энциклопедический словарь
МАНИПУЛЯТОР — МАНИПУЛЯТОР, а, муж. 1. Цирковой артист, выполняющий фокусы, основанные на ловкости рук. 2. Человек, к рый занимается манипуляциями (во 2 знач.). 3. Название нек рых механических устройств для производства сложных движений, действий, аналогичных… … Толковый словарь Ожегова
Манипулятор — устройство с ручным управлением, предназначенное для дистанционных работ с радиоактивными веществами и изделиями. Термины атомной энергетики. Концерн Росэнергоатом, 2010 … Термины атомной энергетики
манипулятор — а, м. manipulateur. 1. Лицо, производящие различные манипуляции. БАС 1. || Иногда человек совершенно не собирается умирать. А просто своей попыткой самоубийства кого то напугать, обратить на себя внимание .. Мы их называем манипуляторы. То есть… … Исторический словарь галлицизмов русского языка
МАНИПУЛЯТОР — Манипуляторы осуществляют непосредственный ввод информации, указывая курсором на экране монитора команду или место ввода данных. Манипуляторы, как правило, подключаются к последовательному порту. Используются для облегчения управления компьютером … Словарь бизнес-терминов
манипулятор — Управляемые устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом [ГОСТ 25686 85] Тематики роботы промышленные … Справочник технического переводчика
МАНИПУЛЯТОР — (1) механизм, позволяющий осуществлять действия, аналогичные действиям руки человека; (2) в машиностроении сложное механическое устройство с гидравлическим или электрическим приводом, выполняющее дистанционно под управлением оператора действия… … Большая политехническая энциклопедия
Манипулятор — 14. Манипулятор По ГОСТ 25686 85 Источник: ГОСТ 16950 81: Техника радиационно защитная. Термины и определения ориги … Словарь-справочник терминов нормативно-технической документации
манипулятор — (фр. manipulates) 1) машина, механизм для выполнения вспомогательных операций, связанных с изменением положения изделий, приборов, аппаратов в др. в камерах, доступ в которые невозможен; приспособление для работы с радиоактивными веществами; 2)… … Словарь иностранных слов русского языка
Книги
- Манипулятор, Абдуллаев Ч.. Агентство «Миллениум» в своем роде уникально: оно гарантирует успех выборов в законодательные органы любого (да-да, любого!) человека, который воспользуется их услугами. И до нынешнего… ПодробнееКупить за 491 руб
Манипулятор, Юлия Ковалькова. Это был роман о любви. О том, как 19-летняя девочка-студентка одного из лучших вузов страны влюбилась в 26-летнего аспиранта, сделавшего блестящую карьеру на телевидении. О том, как он… ПодробнееКупить за 160 руб электронная книга
Другие книги по запросу «манипулятор» >>
18.2. Автооператоры, манипуляторы и промышленные роботы
Для автоматизации и механизации ручных операций в промышленности используют устройства, которые обладают одной, двумя или тремя возможностями, присущими человеку: физическими, функциональными или умственными. Физические возможности — это способность развивать силу, скорость, совершать работу по перемещению тел, двигаться и работать надежно и непрерывно в течение длительного времени. Функциональные возможности — это умение приспосабливаться к внешним условиям при воспроизведении некоторых двигательных функций человека. Умственные возможности — это способность к ощущению и восприятию, к памяти, логике, обучению, к распознаванию команд управления и т. п. Эти устройства имеют самые разные названия, классификация их очень условна, так как признаки очень разнообразны; основными являются автооператоры, манипуляторы и промышленные роботы.
Автооператором называют автоматическую машину или устройство в виде манипулятора и неперепрограммируемого устройства управления. Автооператор служит для выполнения вспомогательных и транспортных производственных операций. Наладка автооператора требует регулирования, смены кулачков, перестановки упоров, изменения размеров звеньев и т. п. Автооператоры отличаются простотой системы управления и конструкции, обладают высокой надежностью и долговечностью, поэтому они (несмотря на необходимость переналадок) широко применяются в машиностроении. Обычно автооператоры выполняют одну, две, иногда три простые операции.
Манипулятор — это управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве. Это устройство оснащено рабочим органом.
Промышленный робот — это автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций. Таким образом, промышленный робот — это машина-автомат, которая частично или полностью выполняет функции человека.
В настоящее время промышленные роботы и манипуляторы включают в состав автоматизированных и автоматических линий, гибких производственных систем и автоматизированных комплексов. Они позволяют избавить человека от монотонного, малоквалифицированного, тяжелого и часто вредного для здоровья труда. Число роботов, отнесенное к общему количеству промышленных рабочих, во всех развитых странах непрерывно повышается. Роботы позволяют улучшить качество выпускаемой продукции, уменьшить брак и отходы производства, снизить себестоимость продукции. Роботы способны выполнять работу в условиях ограниченной видимости, в темноте, при высоких температурах, в воде, в вакууме, во вредной атмосфере и т. п. Они способны быстро приспосабливаться к изменениям в конструкции изделий (обладают гибкостью), т. е. являются технической базой при создании гибких автоматизированных производств, приспособленных к частой смене продукции.
На рис. 18.1 показаны подуконструктивная (рис. 18.1, а) и структурная (рис. 18.1, б) схемы промышленного робота, предназначенного для автоматизации вспомогательных работ при обслуживании технологического оборудования. Робот I производит загрузку заготовок IV в пресс III. Робот оснащен системой позиционного управления II с электроприводом, состоящим из электродвигателей, датчиков скорости и положения. Основная цепь робота состоит из звеньев 1,2,3,4,5 и захватного устройства 6, 6’. Эти звенья соединены одноподвижными кинематическими парами, допускающими относительный поворот звеньев на соответствующие углы φ10, φ21, φ32, φ43, φ54, φбб, φ66′. Программирование робота осуществляется путем обучения с пульта управления и команд на программоносителе от системы управления.

Рис. 18.1. Компоновка основных устройств (а) и структурная схема (б) шарнирно-рычажного механизма промышленного робота
В зависимости от вида кинематических пар, использованных в структурной схеме робота, числа и размеров звеньев получают разные размеры, форму и объект рабочей зоны, обслуживаемый манипулятором, и разные манипуляционные и маневренные возможности.
В зависимости от назначения применяет позиционную или контурную систему управления роботами. При позиционной системе управления программа определяет координаты точек пространства, в которых последовательно должно находиться захватное устройство манипулятора. Этого обычно достаточно для выполнения операций типа «взять — положить». Траектория между заданными точками пространства при позиционной системе не контролируется, а выбирается такой, чтобы время движения было бы минимальным. Контурная система управления строится на базе микроЭВМ с использованием специального языка, созданного для упрощения общения оператора с роботом.
При этой системе задаются координаты определенных точек: начала и конца перемещения на заданном участке и вид кривой между этими точками: прямая, окружность или другая линия. Это задание должно обеспечить рабочему инструменту робота непрерывное движение по определенной траектории, зависящей от конфигурации, например, обрабатываемой заготовки. Создание такой программы обучения производится с пульта с помощью ручного управления в процессе обучения робота.
Промышленный робот мод. РФ-204М, имеющий манипулятор с двумя «руками», с грузоподъемностью по 1 кг показан на рис. 18.2. Одна «рука» при обслуживании рабочей зоны станка держит заготовку, которую надо установить, а вторая—предварительно снимает обработанную деталь. Такое решение позволяет уменьшить простои станка. Привод робота — пневматический. Система управления — цикловая: все звенья работают с помощью датчиков конечного положения (упоров). Точность позиционирования высокая — до 0,05 мм. Программа робота формируется по пробному перемещению, которое проводится вручную по командам с пульта управления.

Рис. 18.2. Промышленный робот мод. РФ-204М с двуруким манипулятором
Для обслуживания нескольких станков манипулятор крепится на транспортном устройстве — тележке. Транспортная тележка перемещается по двутавровой балке с помощью линейного асинхронного двигателя. Робот имеет 8 степеней подвижности, не считая подвижности захватного устройства.
Электрогидравлический робот «Контур 002М» работает в сферической системе координат и имеет 6 степеней подвижности (рис. 18.3).

Рис. 18.3. Электрогидравлический робот «Контур 002М»
В конструкции этого робота использованы неполноповоротные гидравлические двигатели, которые развивают значительные крутящие моменты. Грузоподъемность — до 10 кг, скорость перемещения инструмента, закрепленного в захватном устройстве, может достигать до 2 м/с, погрешность позиционирования — до 3 мм. Робот «Контур 002М» обычно используют на тех операциях, где требуется непрерывное перемещение рабочего инструмента по заданной траектории. К таким операциям относятся шлифование поверхности сложной формы, пескоструйная обработка, окрашивание и др.
Роботами «Контура управляет специальная система управления. В процессе обучения происходит автоматическая запись программы на магнитных дисках. При обучении оператор вручную перемещает захватное устройство или рабочий инструмент по требуемой траектории. При работе система управления получает сигналы от датчиков, которые установлены во всех кинематических парах, сравнивает полученную информацию с запрограммированной на данный момент в процессе обучения и выдает необходимые команды на гидроприводы, обеспечивающие воспроизведение требуемых перемещений.
Основные конструктивно-компоновочные схемы промышленных роботов показаны на рис. 18.4, согласно которым роботы могут быть разделены на 10 групп.

Рис. 18.4. Основные конструктивно-компоновочные схемы промышленных роботов: а — напольно-стреловые с манипулятором на подвижной или неподвижном опорной части, б — тельферно-стреловые с манипулятором, прикрепленным к тельферной тележке, которая перемещается по подвижному мосту, в, г — портально-стреловые, у которых опорная часть выполнена в виде портала, д — напольные с шарнирно-стреловым манипулятором, закрепленным на подвижной или неподвижной опорной части, е — портальные шарнирностреловые, ж — напольно-шарнирные с шарнирным манипулятором, закрепленным на подвижной или неподвижной опорной частн, з — гельферно-шарнирные (на тельферной тележке), и — мостошарнирные, к — портально-шарнирные
На рис. 18.5 показана схема расположения промышленного робота 5, используемого в качестве автоматического загрузочного устройства, обслуживающего два станка (например, шлифовальных) 2 и 3, заготовки к которым поступают по конвейеру 1.

Рис. 18.5. Схема оборудования промышленным роботом конвейера и двух станков
В исходной позиции А робот захватывает с конвейера 1 заготовку по команде с пульта управления и переносит ее на позицию В. Во время обработки заготовки робот имеет останов. После окончания операции на станке 2 заготовка переносится на позицию С перед станком 3. По сигналу управления на станке 3 открывается заслонка 4 и заготовка устанавливается на позицию D, а захватное устройство манипуляюра возвращается в исходную позицию А для захвата следующей заготовки.