Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости изменением величины напряжения снижает момент и также увеличивает потери мощности. Регулировка частоты вращения путем изменения числа полюсов осуществляется ступенчато, кроме того, этот способ пригоден только для специальных многоскоростных двигателей с несколькими обмотками неподвижной части.
Асинхронный двигатель – самый распространенный электропривод технологического оборудования. Главная особенность таких электрических машин – постоянная скорость вращения вала. Ее регулировку осуществляют:
- Механическим способом. Для этого вал подключают к редукторам, муфтам и другим устройствам.
- Путем изменения числа пар полюсов, величины или частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Наиболее перспективный метод регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот способ обеспечивает сохранение механических характеристик во всем диапазоне и обладает рядом других преимуществ.
Устройство и принцип работы частотного регулятора
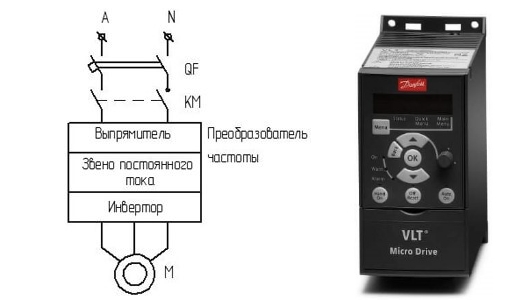
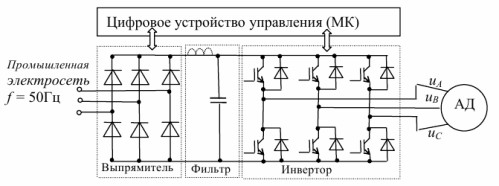
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С появлением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С или LC фильтром для сглаживания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования постоянного напряжения в переменное, заданной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в постоянное, затем снова инвертируется в переменное. Частота на силовом выходе ПЧ определяется длительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Такой способ регулирования позволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а значит управлять скоростью вращения ротора и моментом на валу электрической машины.
Структура частотного регулятора
Большинство частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они позволяют моделировать напряжение питания необходимой формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной нагрузкой. Специальные фильтры применяют относительно редко.
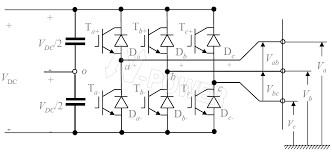
К недостаткам такой схемы является ограничение величины выходного напряжения, которое определяется максимальным напряжением полупроводниковых устройств.
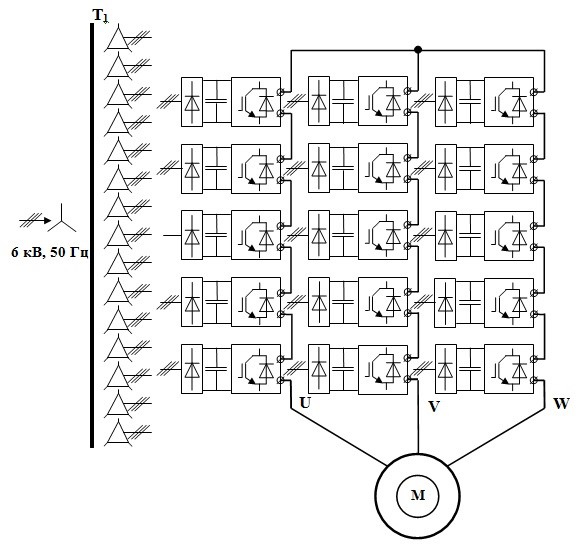
Для высоковольтных приводов используются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных последовательно. Такая схема позволяет избежать резонансов, обеспечивает высокое быстродействие, снижает скорость нарастания напряжения. Такие ПЧ имеют модульную конструкцию. При выходе из строя одной из ячеек, ее легко заменить. К недостаткам этой схемы относятся необходимость отдельного источника питания для каждого модуля, функции которого выполняет трансформатор специального назначения.
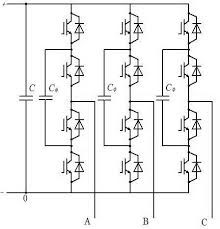
Преобразователи частоты с плавающими конденсаторами позволяют обойтись без входного трансформатора и увеличивать число ячеек в зависимости от требуемой мощности. Такое решение обеспечивает снижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами применяют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи нагрузки в схему включается расщепленный индуктивный фильтр. Выходное напряжение таких устройств имеет форму аппроксимированной синусоиды. Для сглаживания его формы обязательно включение перед электродвигателем конденсаторов. Главное достоинство таких ПЧ – возможность рекуперации электроэнергии обратно в электросеть.
Прямые преобразователи частоты не содержат конденсаторов. Главное их преимущество – небольшие габариты и значительная мощность нагрузки. Такие устройства используются в составе мощных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для каждого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Кроме выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК, другими частотными преобразователями.
- Встроенная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, изменения настроек, а также другие данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает снижение реактивной высокочастотной составляющей, снижающей качество электроэнергии и отрицательно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного охлаждения и отвода тепла силовых транзисторов.
- Тормозной прерыватель и другие элементы.
Кроме аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой позволяют вносить изменения в стандартное ПО, поставляемое производителем, и самостоятельно программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели широко применяются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электрических машин применяются 2 основных способа:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения применяются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения путем регулирования напряжения имеет ряд серьезных недостатков:
- Увеличение скольжения и сильный нагрев обмоток статора.
- Узкий диапазон регулирования.
Кроме того, постоянная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает увеличение шума при работе, рывки и другие нежелательные явления.
Частотное регулирование лишено этих недостатков. Однофазные ПЧ применяются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Стабильную работу однофазного двигателя при любой частоте вращения.
- Снижение потребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с обратной связью по изменению одного или нескольких технологических параметров.
- Удаленное управление и контроль характеристик.
- Защиту от ненормальных режимов работы и коротких замыканий.
- Интеллектуальное управление электродвигателем в соответствии с заданным алгоритмом.
- Возможность пуска без фазосдвигающего элемента.
- Поддержание необходимого момента на валу во всем диапазоне изменения скорости.
Кроме базовых составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При введении дополнительных настроек допустимо применение трехфазного ПЧ для однофазных двигателей переменного тока.

Таким образом, управление однофазными и трехфазными асинхронными электродвигателями путем изменения частоты значительно превосходит метод регулирования величины напряжения, механические способы.
Асинхронный двигатель с тиристорным регулятором напряжения
Скорость асинхронного двигателя (АД) можно регулировать изменением напряжения, подводимого к статору, при этом частота напряжения на двигателе не изменяется и равна частоте сети 50 Гц.
Для регулирования напряжения на статоре АД (рис. 8.11) наибольшее распространение получили тиристорные регуляторы напряжения (ТРН), которые обладают большим быстродействием, высоким КПД, небольшой стоимостью. В каждую фазу трехфазного ТРН включаются два тиристора по встречно-параллельной схеме, которая обеспечивает протекание тока в нагрузке в оба полупериода напряжения сети U1. Тиристоры получают импульсы управления Ua от системы импульсно-фазового управления (СИФУ), которая обеспечивает их сдвиг на угол управления αа в функции внешнего сигнала Uy. Изменяя угол управления αа от 0 до 180°, можно регулировать напряжение на статоре от полного напряжения сети U1 до нуля. Форма напряжения статора является несинусоидальной.
Несинусоидальное напряжение представим как совокупность нес-кольких синусоидальных напряжений –— гармоник с определенной час-тотой. Частота изменения первой из них (основной) равна частоте питающего напряжения f1,ь а частоты других гармоник больше, чем первой. Основная гармоника имеет наибольшую амплитуду, и по ней ведутся все основные расчеты.На рис.8.14,(б)показаны механические характеристики АД при изменении напряжения на его статоре.
Регулирование напряжения на статоре не приводит к изменению скорости ХХωw и не влияет на критическое скольжение sK, но изменяет значение критического (максимального) момента МKк. Критический момент пропорционален квадрату напряжения: МK к
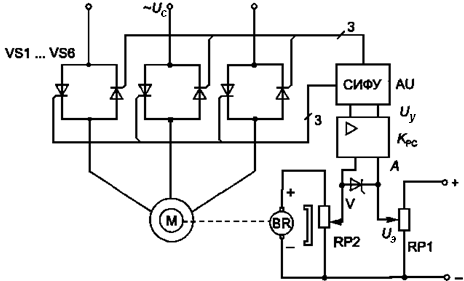
Рис. 8.11.Схема асинхронного ЭП с тиристорным пусковым устройством
Скольжение s определяется зависимостью, где ω – скорость идеаль-
ного холостого хода АД:
Скольжение sопределяется зависимостью
где w — скорость идеального холостого хода АД.
Полная мощность на валу, включающая потери на трение и венти-ляцию:
где М – — электромагнитный момент двигателя.
Полная электромагнитная мощность, передаваемая от статора к ро-тору через воздушный зазор:
Разность мощностей  рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
рассеивается в виде теплоты в активных сопротивлениях ротора. Потери в роторе определяются как
 . (8.1)
. (8.1)
Часть электромагнитной мощности, пропорциональная скольжению s, рассеивается в виде теплоты в обмотке ротора, другая часть, пропор-циональная (1 — s), передается на вал двигателя, т.е.
 (8.2)
(8.2)
Т. о.,Способ регулирования скорости изменением напряжения является неэкономичным, так как потери в роторе при постоянном моменте наг-рузки возрастают пропорционально скольжению.
Из (8.1) получим выражение длямомент двигателя:
 , (8.3)
, (8.3)
где т –— число фаз статора; r2–— сопротивление ротора.
 .
.
В установившемся режиме работы момент двигателя М равен мо-менту сопротивления МсМС. Для вентиляторной нагрузки

Вывод. Токи АД  обратно пропорциональны
обратно пропорциональны  .
.
Продифференцировав последнее выражение, легко показать, что токи имеют максимальное значение при s = 1/3 или ωw = 2/Зωw. Для постоянного момента нагрузки полу-чаем:
 .
.
| Рис. 8.12. Характеристика АД с повышенным сопротивлением статора |
Cопротивление ротора является важным параметром, влияющим на токи двигателя. Для получения удов-летворительных режимов работы двигателя с вентиляторным моментом сопротивления на валу необходимо применять двигатели с повышенным сопротивлением ротора, обеспечи-вающим номинальное скольжение 10. 12 %. При работе с постоянным моментом нагрузки сопротивление ротора должно быть еще больше.
На рис. 8.12 приведены харак-теристики двигателя с повышенным сопротивлением ротора. Их сравнение с характеристиками на рис. 8.11 показывает, что при применении двигателя с повышенным сопротив-лением ротора удается несколько увеличить диапазон регулирования. Для рассматриваемого способа используются также двигатели с пере-менным сопротивлением ротора. Обычные глубокопазовые или двух-кле-точные двигатели в этих случаях оказываются малоэффективными. Луч-шие характеристики имеют двигатели с массивным ротором или клиньями, изготовленными в виде постоянных магнитов. В этом случае нагрев двигателя уменьшается, так как часть потерь в роторной цепи рассеивается вне двигателя.
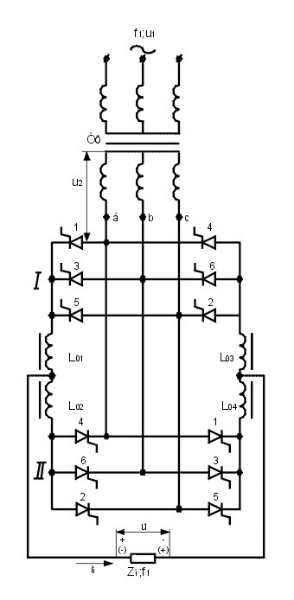
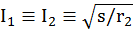
Все перечисленные мероприятия не могут существенноо устранить потери в роторной цепи,что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, (см. рис.7.8,а) могут быть использованы 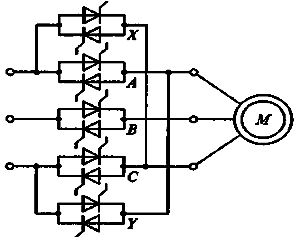 обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
обычные контакторы, которые переклю-чают два провода в цепи статора при отсутствии тока в силовой цепи, за счет предварительного устранить потери в роторной цепи, что сильно ограничивает диапазон регулирования в этой системе. Для реверса АД, рис.7.8,а, могут быть использованы обычные контакторы, которые переключают два провода в цепи статора при отсутствии тока в силовой цепи за счет предварительного запирания тиристоров. Бестоковая коммутация позволяет повы-сить безотказность работы контакторов. Реверсирование фаз статора можно осущес-твить также бесконтактным способом за счет включения дополнительных тиристор-ных групп (рис.8.13). При прямом враще-нии двигателя тиристоры дополнительных групп Х иУ закрыты.
| Рис. 8.13. Схема тиристорного регулятора напряжения для реверсивной схемы |
| Рис. 8.14. Схема несимметричного регулятора напряжения асинхронного двигателя |
 Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.
Управляющие импульсы к этим ти-ристорам подаются в том случае, если группы А и С закрыты. При этом изме-няется порядок чередования фаз прило-женного напряжения к статору напряже-ния, и двигатель реверсируется. Группы Х и У должны открыватьсяпосле полного запирания групп A и C, в противном случае возникает режим КЗ. Для предотвращения режима КЗ в фазы статора включают датчики тока, которые запрещают перек-лючение тиристорных групп до тех пор, пока токи не станут равными нулю. На рис. 8.17 приведена схема, которая содержит только две пары тиристоров, а третья фаза наг-рузки подключена непосредственно к сети.

Схема регулятора напряжения может содержать только два тирис-тора, включенных в одну из фаз статора двигателя. Однако в несиммет-ричных схемах усугубляются проблемы, связанные с нагревом двига-теля, так как нагрузка между его фазами распределяется неравномерно и некоторые фазы оказываются сильно перегруженными. Для несиммет-ричной нагрузки линейные напряжения, приложенные к зажимам статора в общем случае не равны друг другу

Если магнитная цепь АД не насыщена, то система несимметричных напряжений с помощью метода симметричных составляющих заменяется двумя системами симметричных напряжений прямой и обратной после-довательностей, которым соответствуют магнитные потоки двигателя, вращающиеся в противоположных направлениях. Если принять угловую скорость прямого поля ωwпр = ωwо за положительную, то угловая скорость обратного поля ωwобр = -ωwо В соответствии с этим скольжение относительно поля прямой последовательности вычисляется по формуле

а последовательности:относительно поля обратной последовательности по формуле

Момент, развиваемый двигателем при асимметричной системе нап-ряжений, равен алгебраической сумме моментов, обусловленных полями прямой и обратной последовательностей::
 .
.
Поскольку каждая из рассматриваемых систем напряжений симмет-рична, для них справедливы известные формулы расчета момента АД.
Несмотря на все отмеченные недостатки, система ТРН-АД вследст-вие ее простого конструктивного исполнения, нашла широкое примене-ние в связи с тем, что она позволяет обеспечить плавный пуск и тормо-жение электродвигателя, ограничить пусковой момент и токи, изменять направление скорости АД. На базе ТРН изготовляются тиристорные ре-версивные и нереверсивные контакторы для пуска, реверса и торможе-ния АД.
Одна из реальных областей применения системы ТРН-АД связана с использованием ее в ЭП насосных и вентиляторных установок.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет