Инструкция к драйверу ШД BL-TB6600-v1.2

Содержание
Введение:
Основанная на чипе TB6600HG новая модель драйвера BL-TB6600-V1.2 пришла на замену популярному драйверу BL-TB6560-V2.0.
Этот драйвер-контроллер подойдет для построения не только любительских систем ЧПУ, но и профессиональных, основаных на двигателях высокой мощности. Если сравнивать с предыдущим поколением драйвера TB6560AHG, то выходная мощность у TB6600HG возросла до 200Вт (как видим практическое удвоение по значению мощности), рабочее напряжение поднято с 35В (TB6560AHG) до 50В, рабочий ток увеличен до 4.5А (5А пиковое значение).
Увеличена максимальная рабочая частота.
Добавлены схемы защиты.
К основной «вкусности» данного драйвера можно отнести интеллектуальное управление током и использование ШИМ моделяции, благодаря чему есть возможность подключать к драйверу шаговые двигатели любого напряжения питания и тока — на установленном уровне микросхема сама ограничит максимальный ток.
Внешний вид:




| Свойства | Параметры |
|---|---|
| Входное напряжение силовой части | от 8В до 50В постоянного напряжения (36В рекомендуется) |
| Выходной ток | от 0.3А до 4.5А (пиковое значение 5А) |
| Микрошаг | 1 .. 2 .. 8 .. 16 |
| Максимальная частота ШИМ | 200кГц |
| Регулировки максимального тока ШД | 1.1А .. 2.2А .. 3.3А .. 4.5А |
| Регулировки тока удержания | 50% или 100% |
| Температура эксплуатации | от -10 до +45° С |
| Размеры | 80мм*50мм*35мм |
| Вес | 118.3г |
Описание:
Конструктивно драйвер изготовлен с возможностью монтажа в корпус и подключением контактных площадок быстроразъемным способом. Что упрощает его установку, эксплуатацию и замену в случае выхода из строя. Подключение производится по следующей таблице:
| Маркировка | Описание |
|---|---|
| 24V+ | Положительный контакт для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| GND | Отрицательный контакты для подключения блока питания (питания шагового двигателя) постоянное напряжение |
| CLK- | Вход для шаговых импульсов STEP (рабочим является передний фронт, длительность > 10мкс) |
| CW- | Вход для управления направлением вращения вала шагового двигателя (DIR) |
| EN- | Вход для включения/выключения шагового двигателя (ENABLE) |
| +5V | Общий сигнальный провод |
| A+,A- | Контакты для подключения I фазной обмотки шагового двигателя |
| B+,B- | Контакты для подключения II фазной обмотки шагового двигателя |
Схемы подключения:
Подключения драйвера к плате коммутации или просто контроллеру осуществляется двумя способами, которые зависят от схемотехнического исполнения и конфигурации портов контроллера.
Пример подключения драйвера к контроллеру на NPN ключах с открытым коллектором

Пример подключения драйвера к контроллеру на PNP ключах с открытым коллектором

Примечание:
Значение сопротивлений R_CLK, R_CW, R_EN зависят от напряжения питания VCC:
- При VCC = 5В, R_CLK = R_CW = R_EN = 0;
- При VCC = 12В, R_CLK = R_CW = 1кОм, R_EN = 1.5кОм;
- При VCC = 24В, R_CLK = R_CW = 2кОм, R_EN = 3кОм;
Подключение драйвера BL-TB6600-v1.2 к плате BL-MACH-V1.1:

Более подробно о интерфейсной плате BL-MACH-V1.1 можно узнать по ссылке Плата коммутационная (контроллер) BL-MACH-V1.1
СТАТЬЯ В ПРОЦЕССЕ НАПИСАНИЯ
Обновлено: 30.12.2017
Комплектующие для самодельного ЧПУ с Таобао
Категорически приветствую всех читателей блога Live от iXBT!
Небольшой обзор драйверов TB6600 для шаговых двигателей 42/57/86.

Опять делюсь своим опытом приобретения товаров на китайской торговой площадке Taobao.
Я уже поднимал тему про посредника YOYBUY в прошлом обзоре.
Поэтому подробно останавливаться на выборе и заказе товаров на Таобао не буду (можно посмотреть в этом обзоре).
Для управления двигателями самосборных ЧПУ станков и 3D принтеров требуются специальные драйверы. Одни из самых распространенных – это дешевые драйверы типа TB6600/TB6560. И если TB6560 — это достаточно бюджетные драйверы, то TB6600 являются более продвинутыми как в плане настроек (ограничения тока, степпинг и т.п.), так и в плане мощности. Драйверы TB6600 позволяют управлять шаговыми двигателями типа 42/57/86 (это соответствует типоразмерам NEMA17/23/34) и выдают до 4.5А на обмотки.
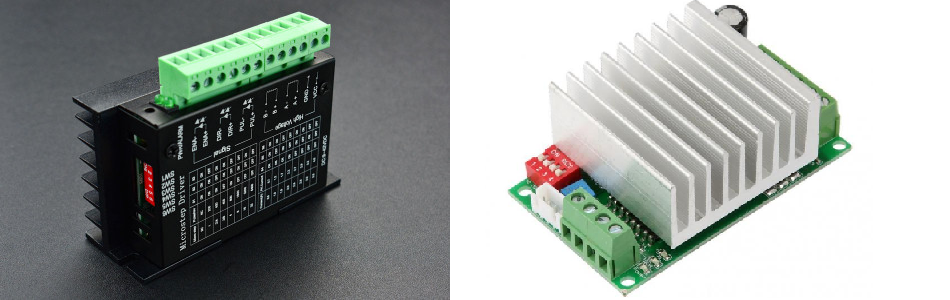
Тоже самое, но через посредника: TB6600 в корпусе ($3.78) и TB6600 без корпуса ($4.37). На Али подобное стоит около $10/шт. (за исключением ТВ6560, которые имеют более «слабые» характеристики, подешевле).
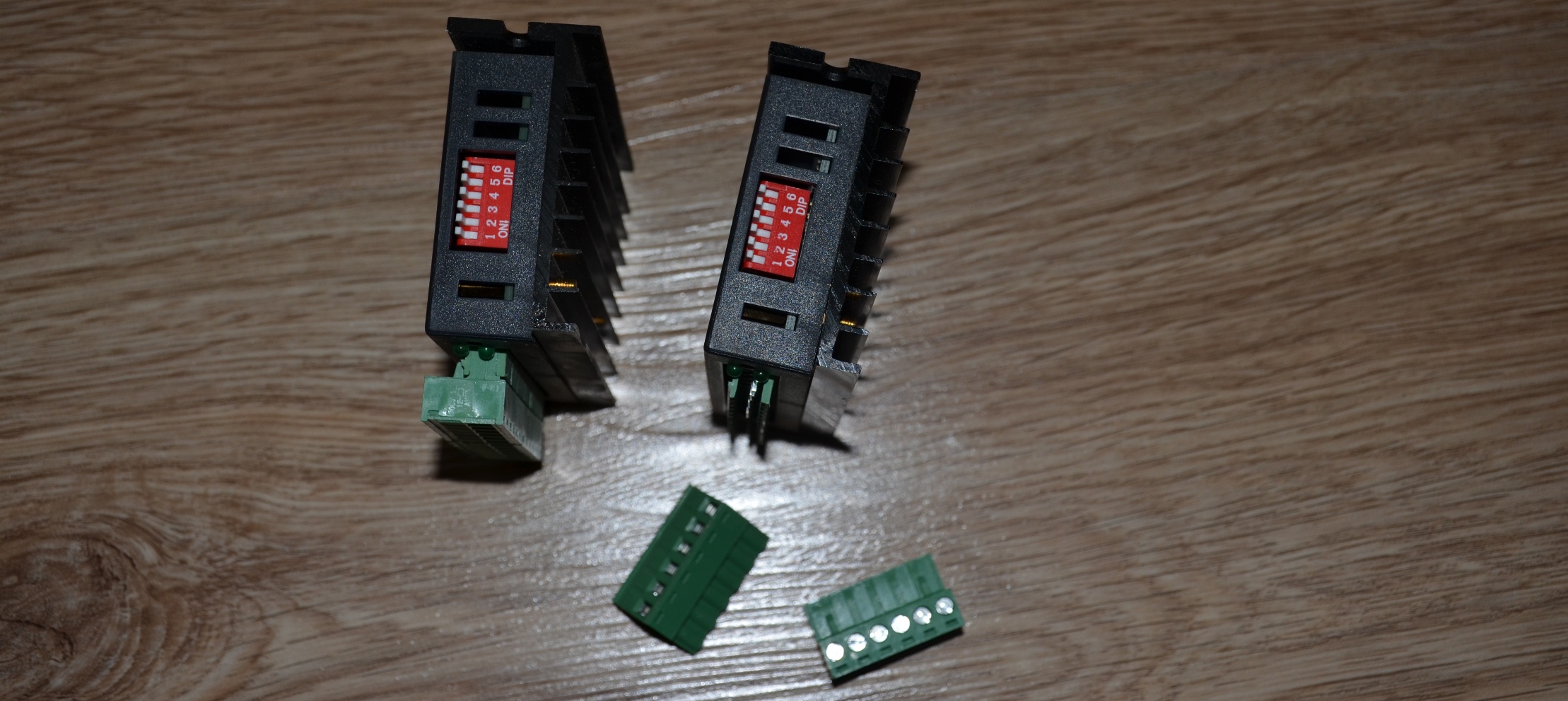
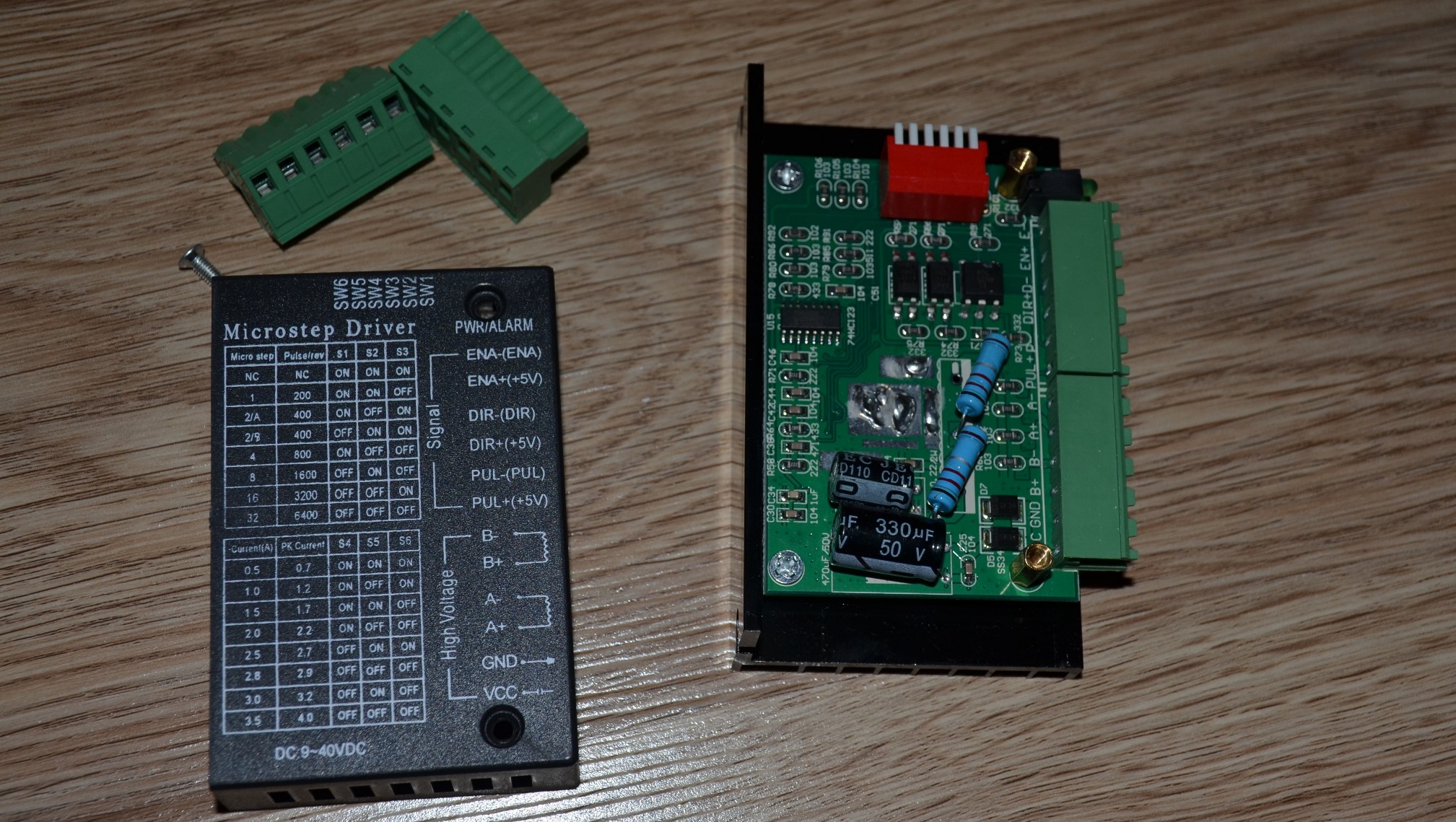
На рисунке TB6600 в корпусе (слева) и TB6600 без корпуса (справа).
Заказывал много, сразу под несколько проектов, так как выгоднее, чем на Али или в оффлайне.
Данные драйверы более мощные и имеют микростеппинг до 1/32, а также вполне подходят для 3D принтеров. Основное применение — работа в связке с шаговыми двигателями 42/57/86 в станках ЧПУ и прочих подобных самоделках.

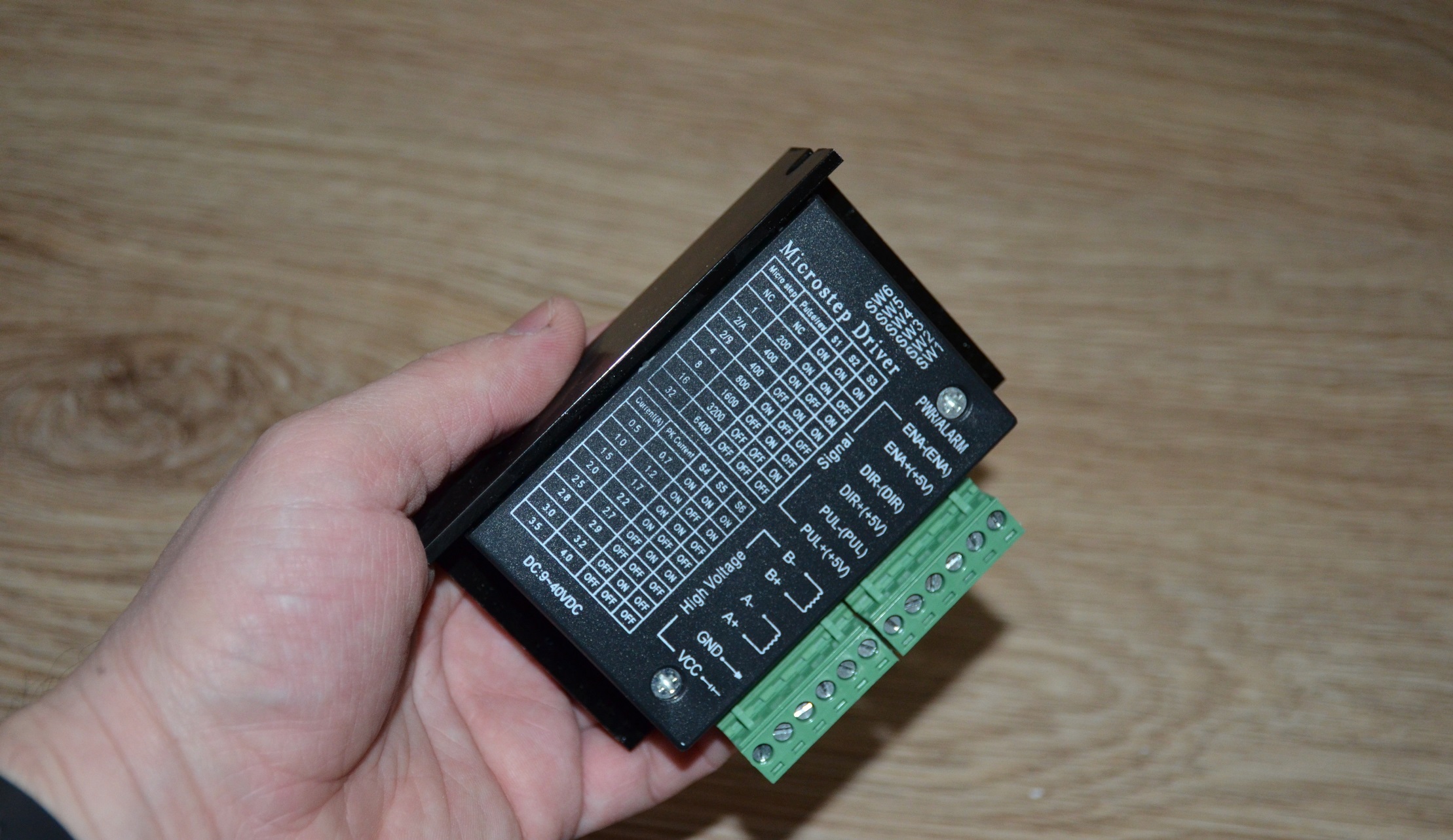
Характеристики драйверов ТВ6600 (в корпусе)
- Рабочий ток/пиковый ток, до: 3.5А/4А
- Микрошаг: 32
- Импульсов на оборот: 6400
- Напряжение питания 9. 42В постоянного тока.
- Масса: около 130 г
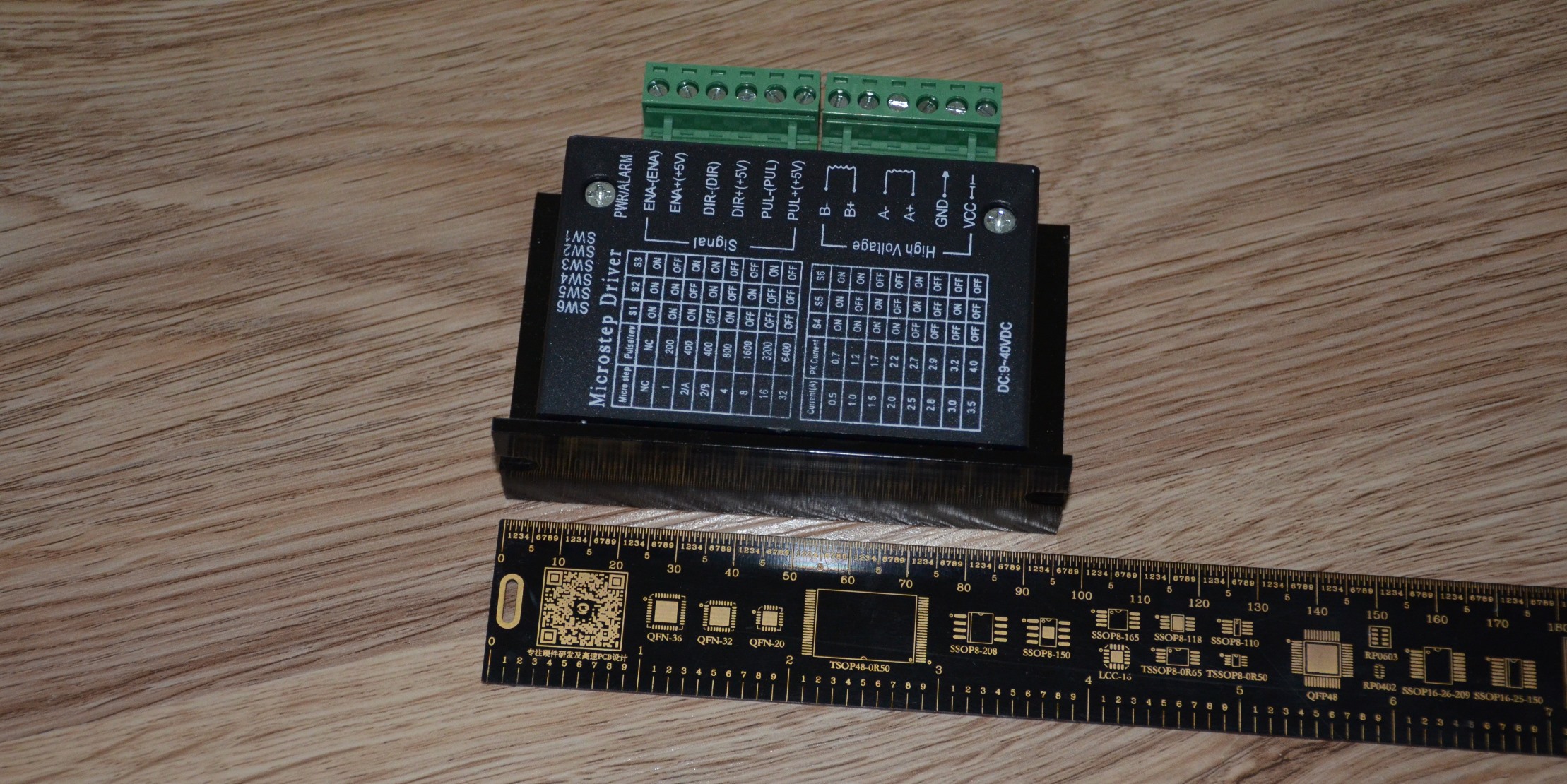
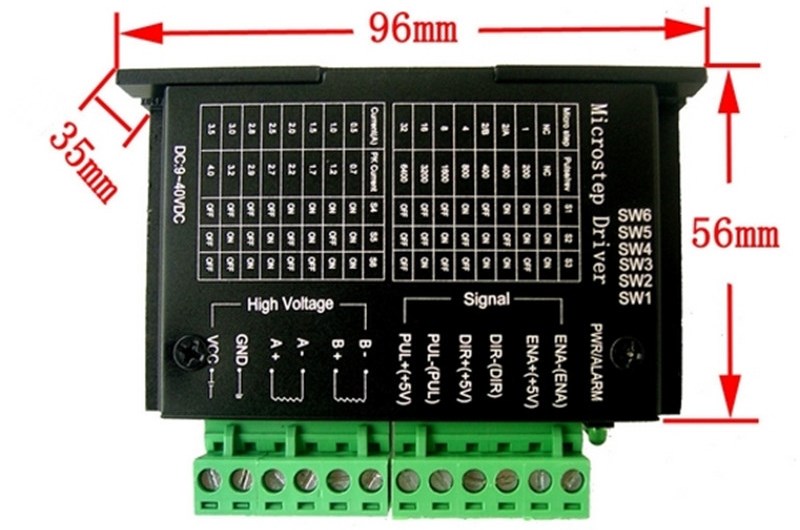
- Размеры: 96 х 56 х 35 мм
Это небольшой блок для монтажа в стойку/корпус, с двумя клеммными колодками. Корпус одновременно служит и радиатором охлаждения.
На корпусе нанесена таблица режимов работы
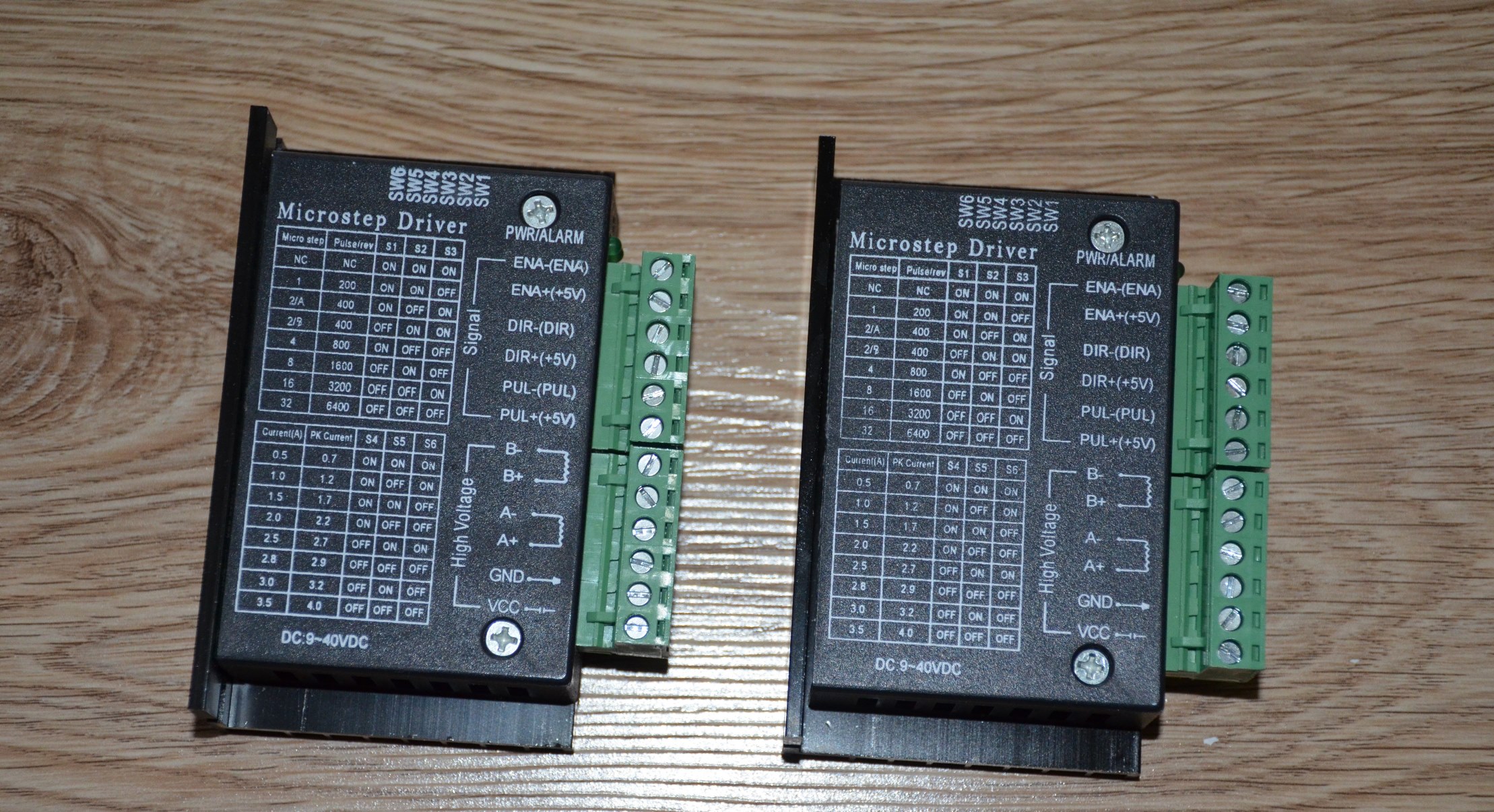
Устанавливаются режимы переключателями SW1-SW6 согласно таблице
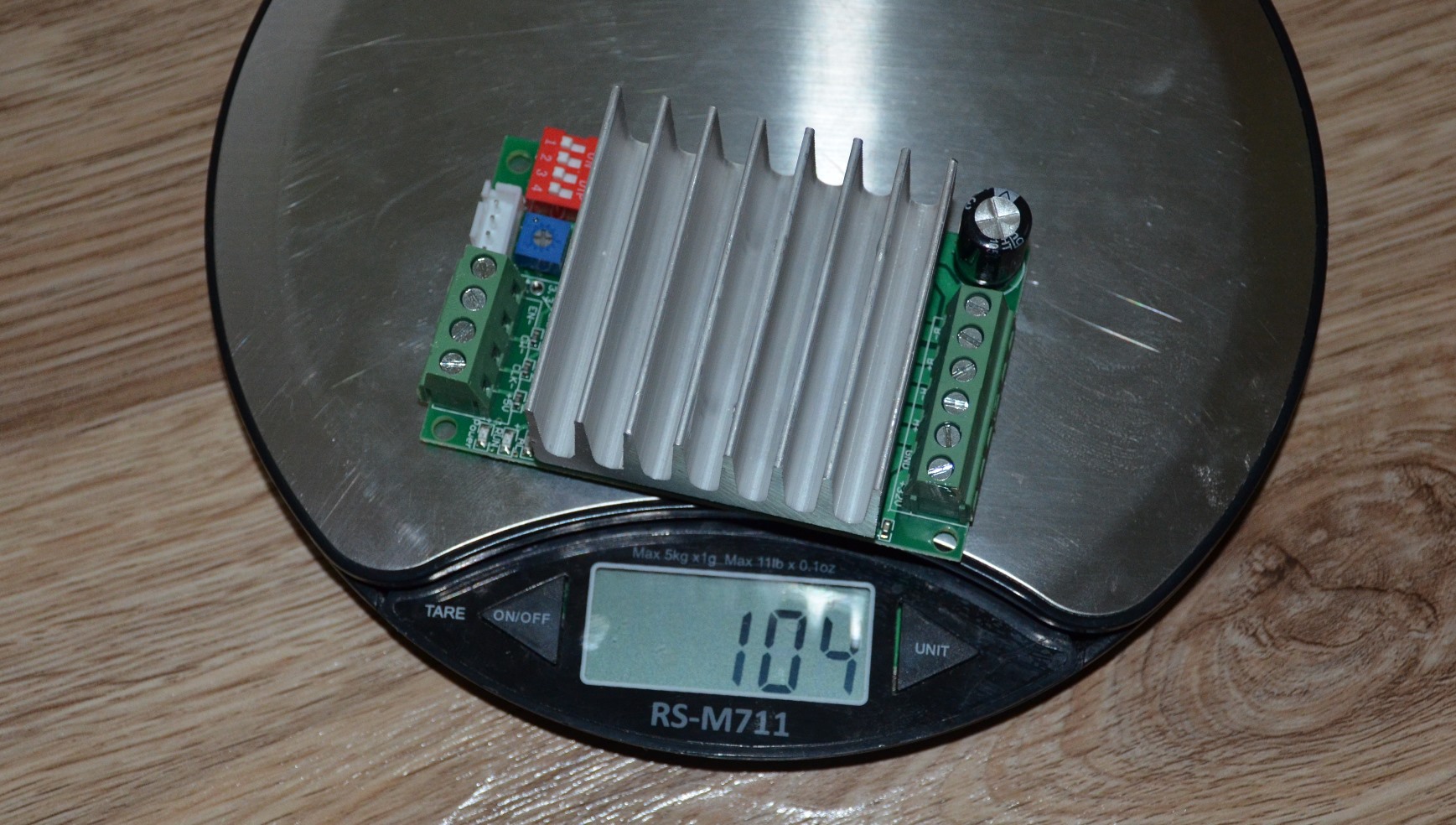
Проверка массы (критично для большого заказа с Таобао)

Габаритные размеры 96 х 56 х 35 мм
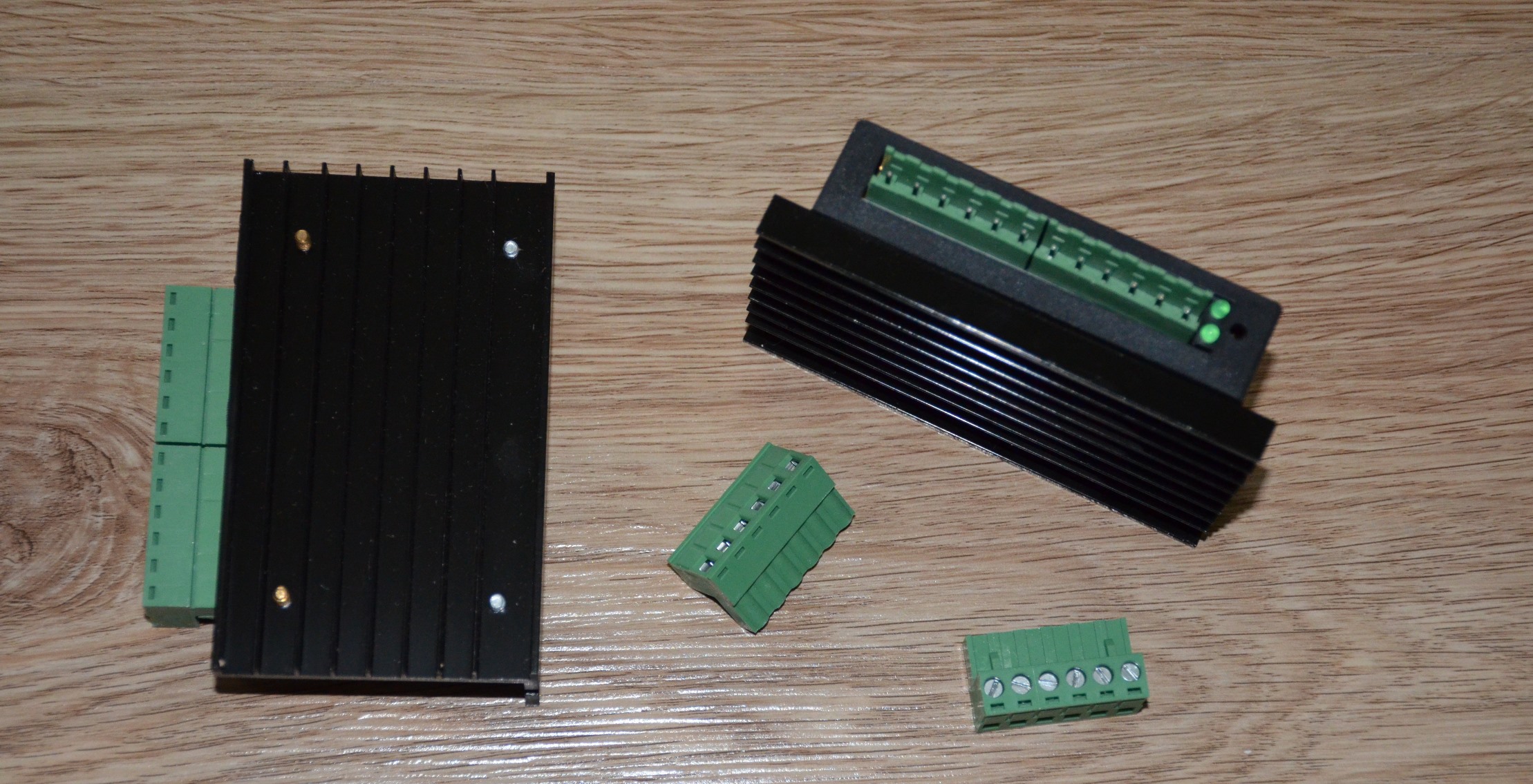
Для сравнения = рядом со вторым драйвером ТВ6600, который без корпуса.

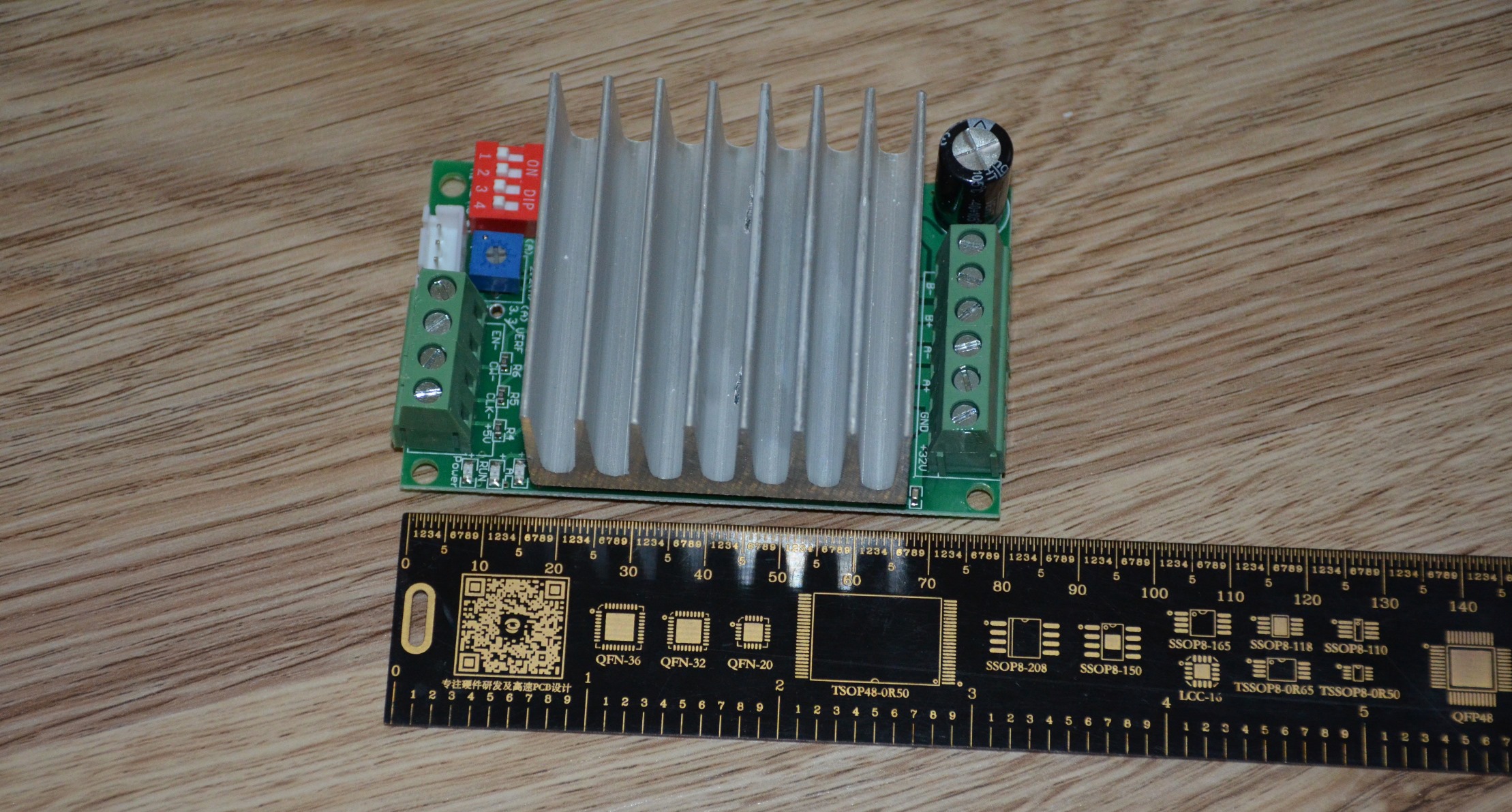
Характеристики драйверов ТВ6600 (без корпуса)
- Рабочий ток/пиковый ток, до: 4.2А/4.5А
- Микрошаг: 16
- Импульсов на оборот: 3200
- Напряжение питания 8. 45В постоянного тока.
- Масса: около 100 г
- Размеры: 82 х 50 х 35 мм
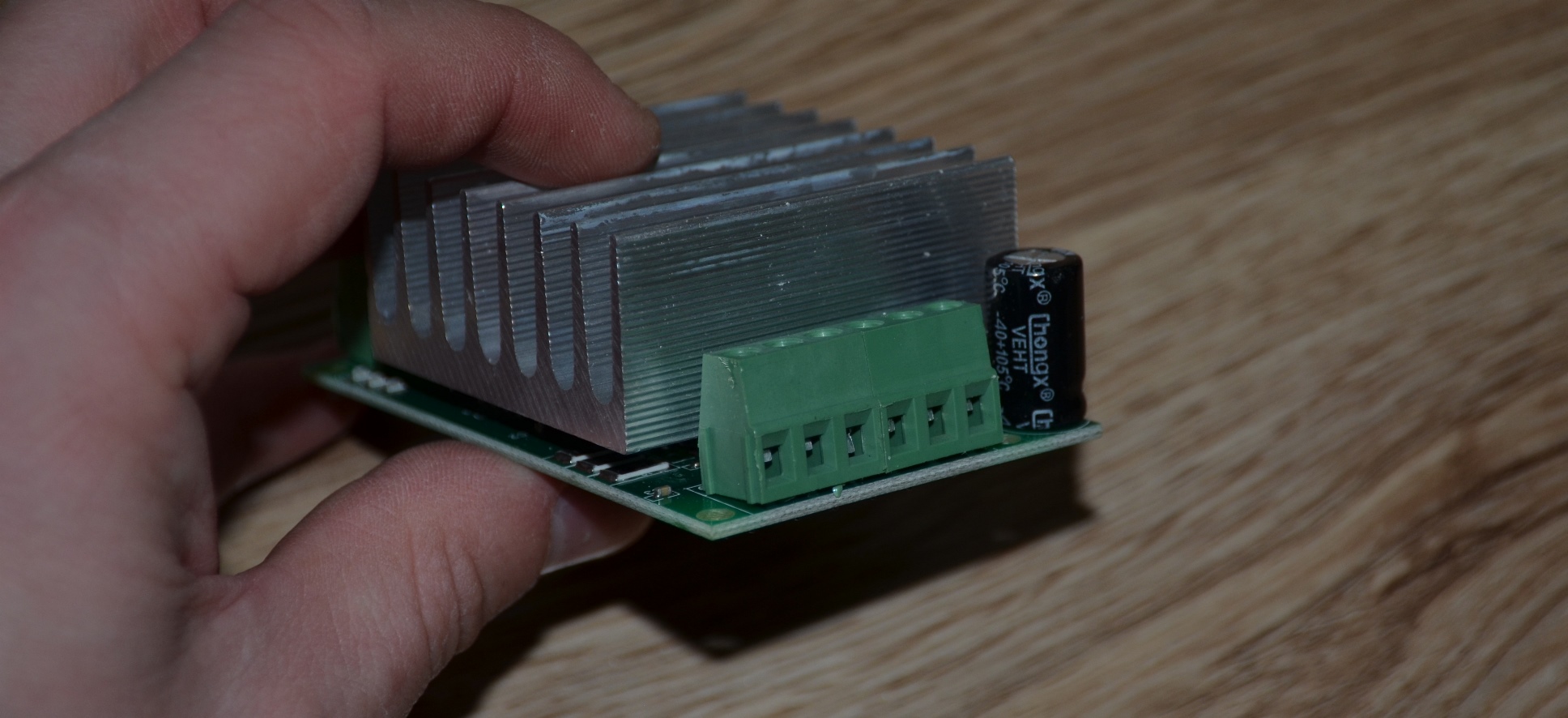
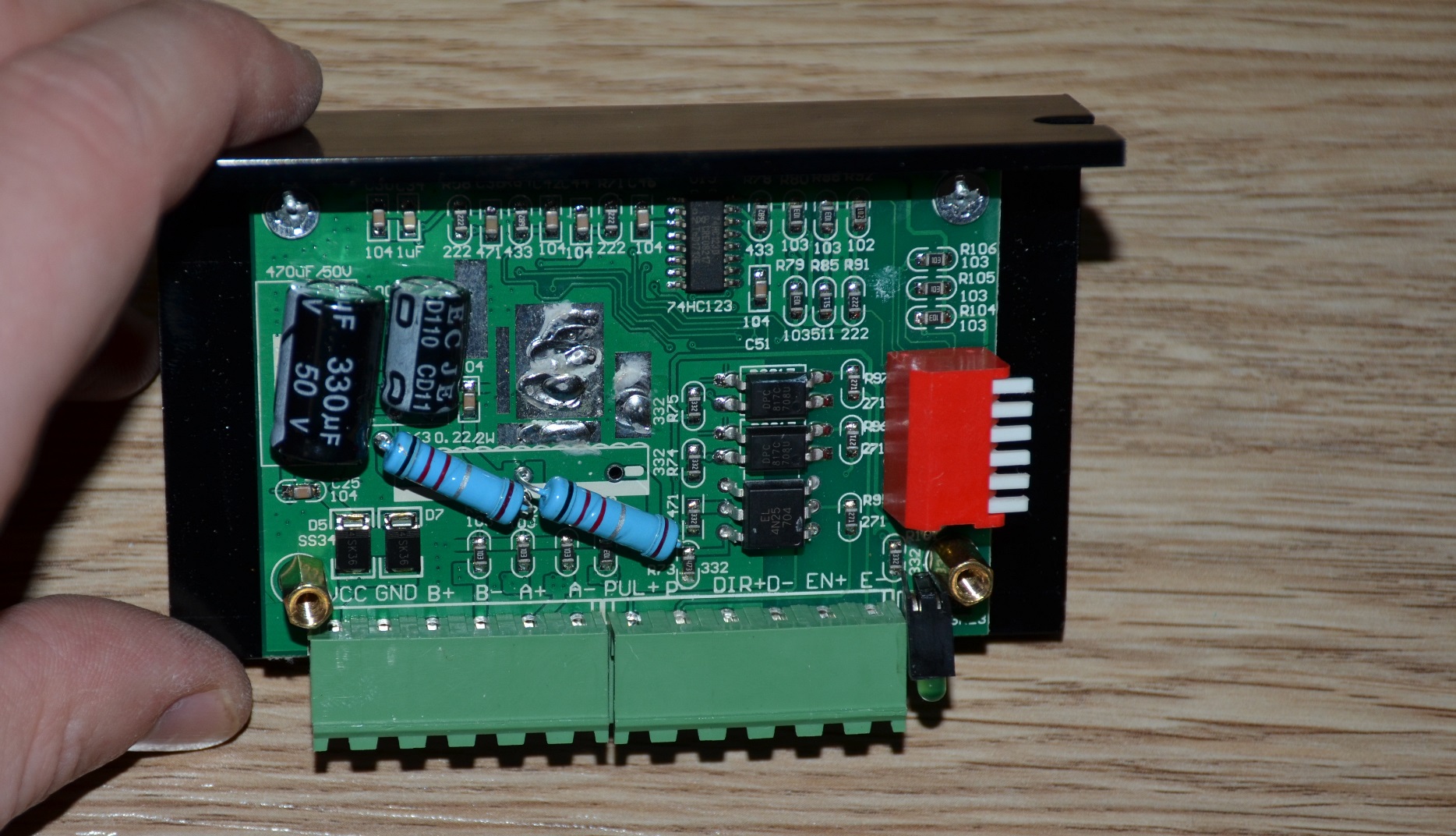
Внешний вид драйвера ТВ6600 (без корпуса).
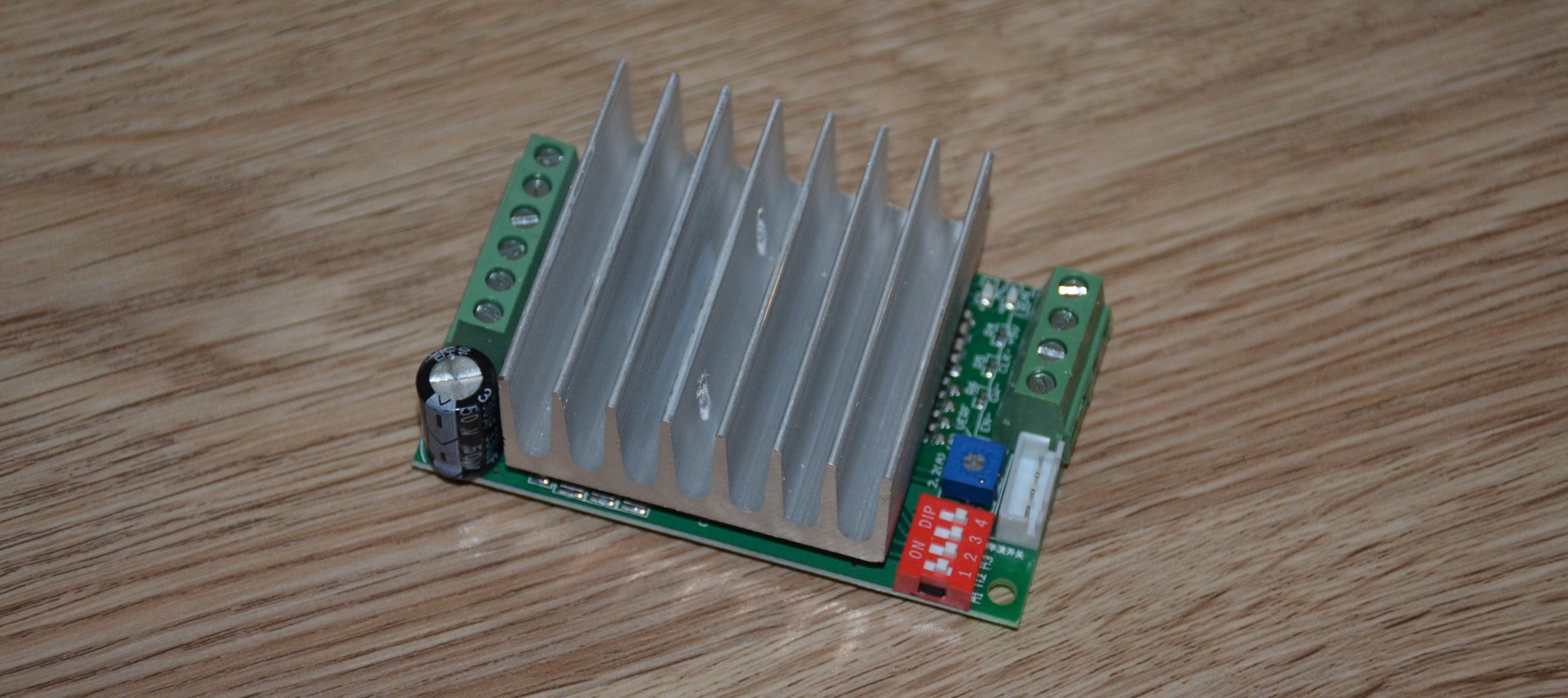
Несмотря на отсутствие корпуса, охлаждение стоит эффективное. Это массивный радиатор, закрывающий практически полностью плату.
Проверка размеров (82 х 50 х 35 мм)
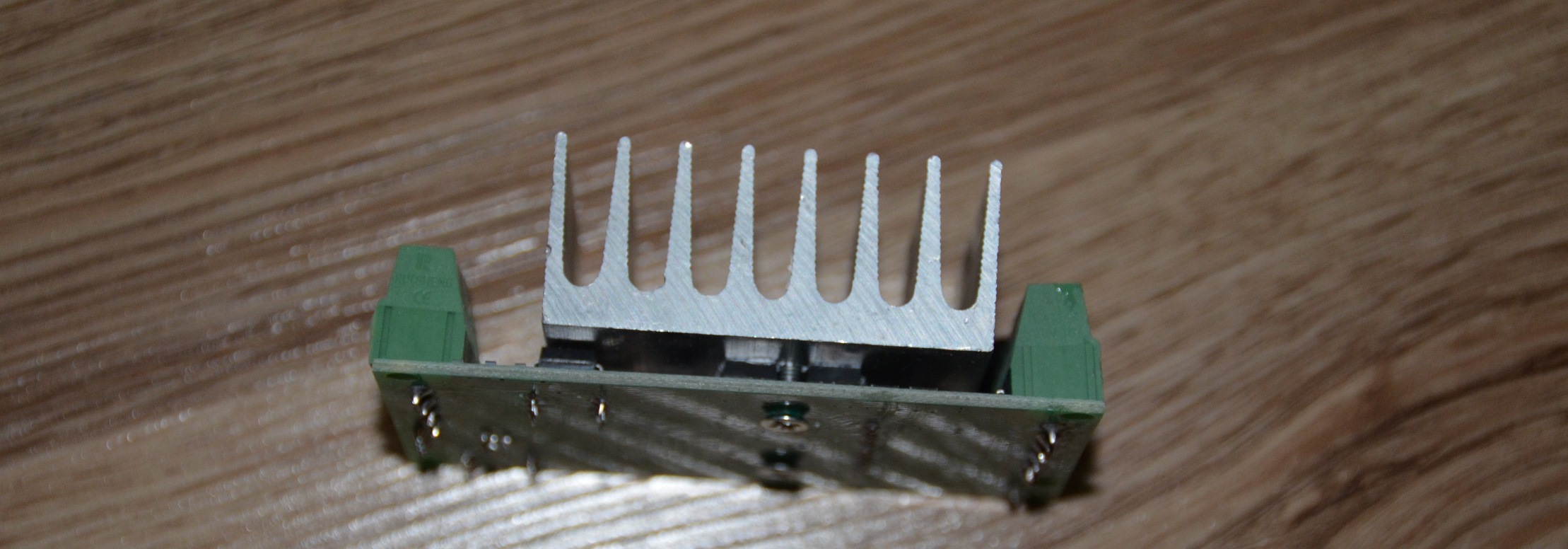
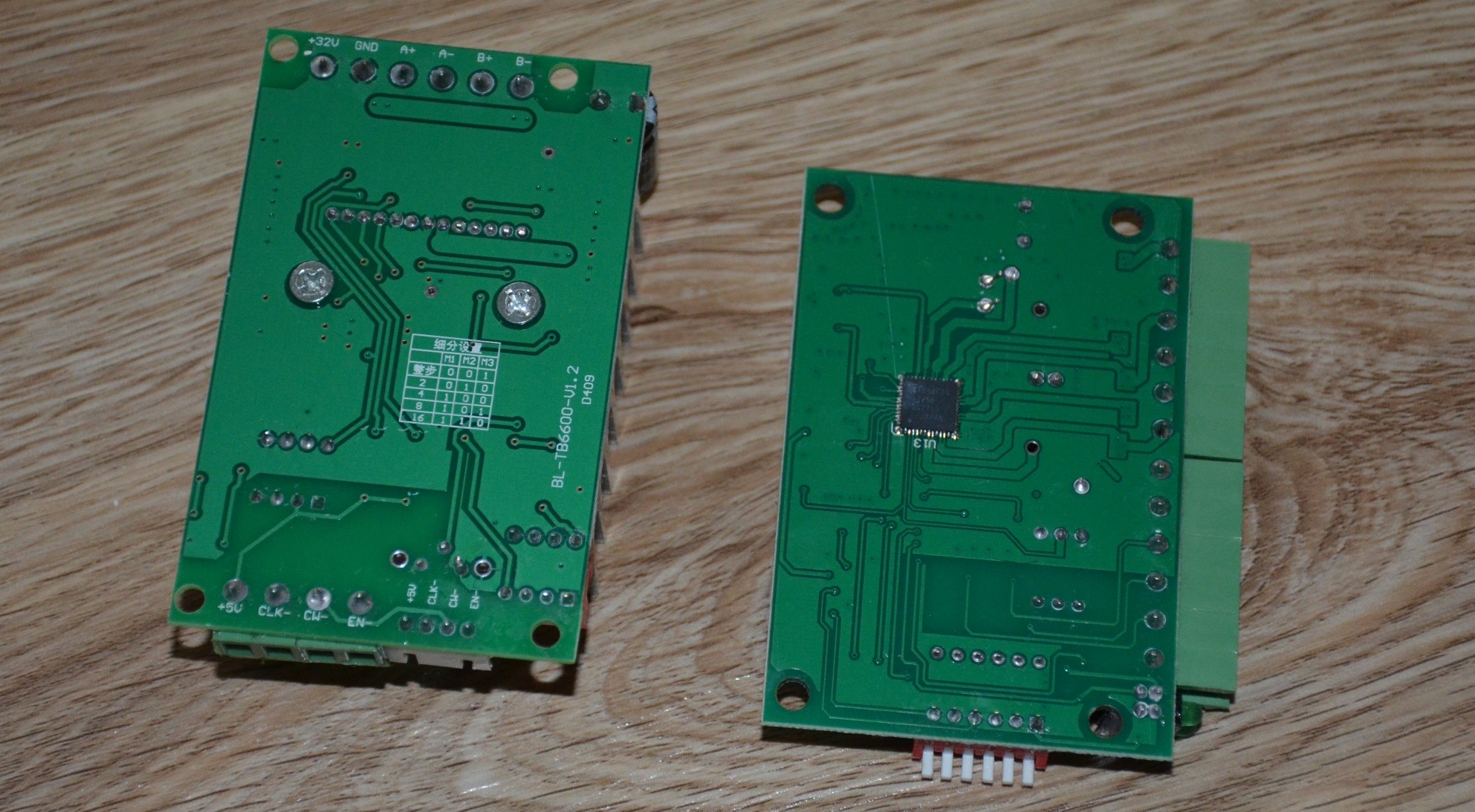
Обратная сторона платы

Под радиатором скрывается интегральный драйвер от Toshiba TB6600HG. Термопаста присутствует, а также гальваническая развязка на основе 6N137.

Для сравнения разберем и другой драйвер. Откручиваем винты корпуса, снимаем крышку.
Снимаем плату с радиатора
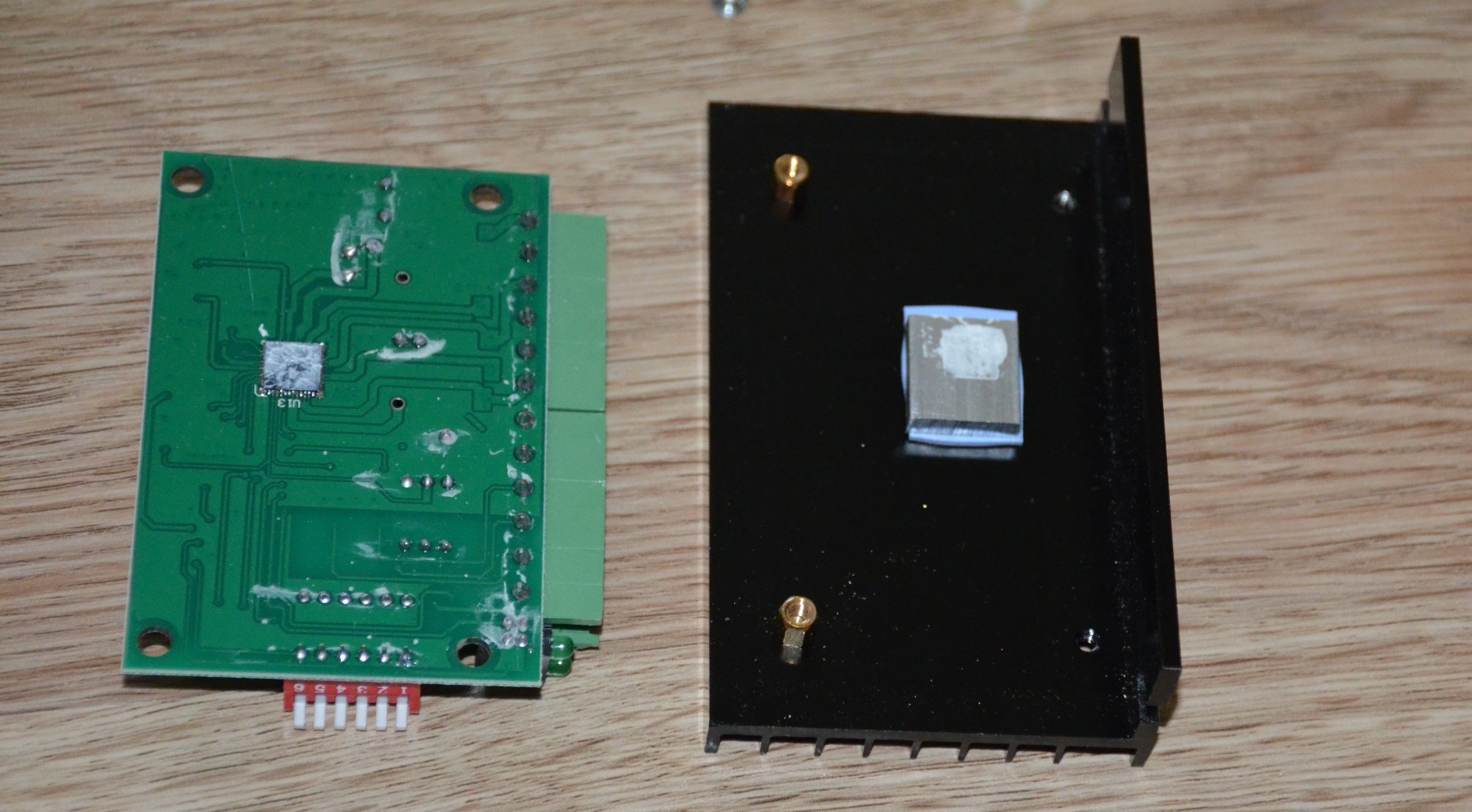
Внешний вид печатной платы драйвера
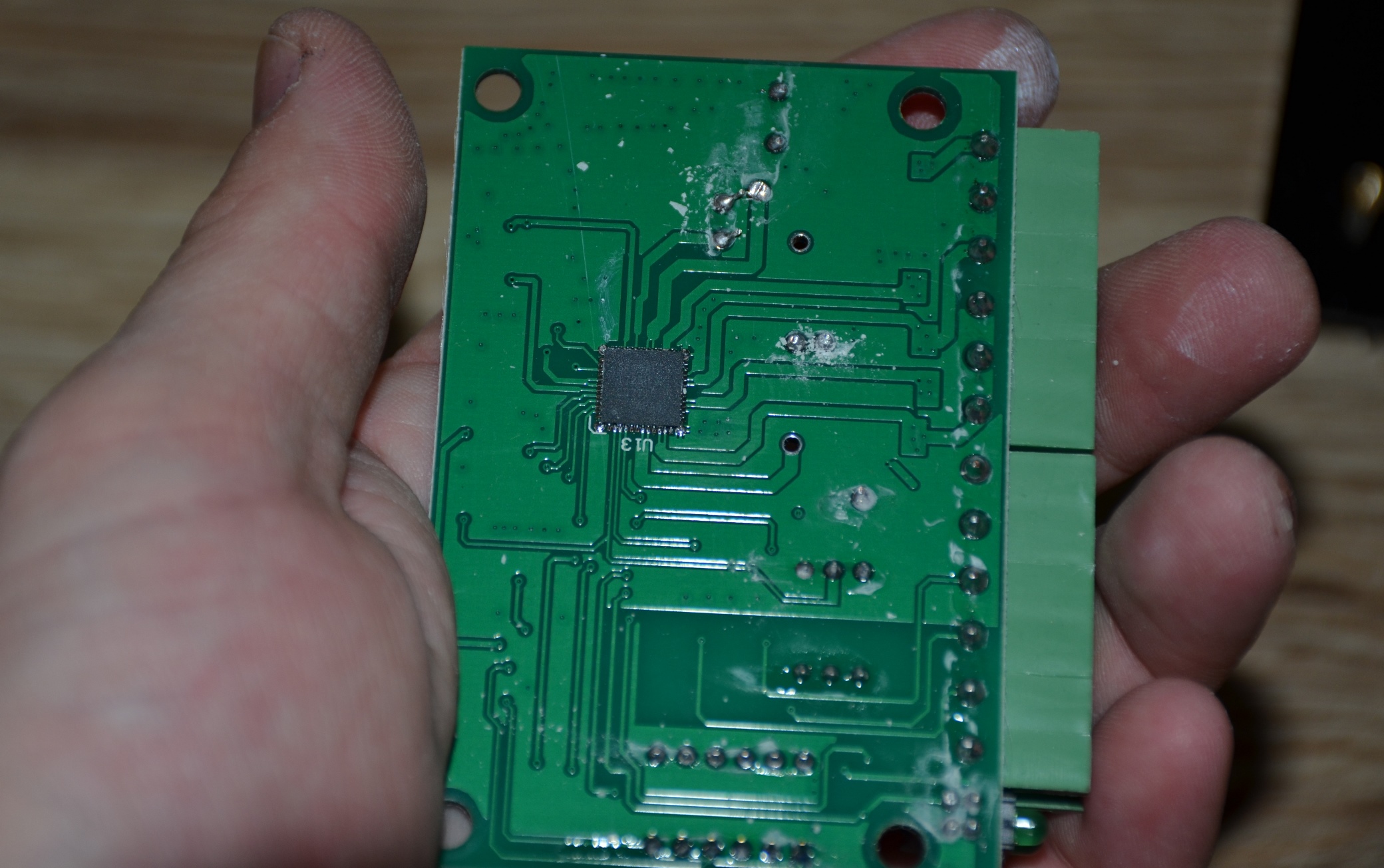
На фото повторители и развязка

В данном случае установлен драйвер, аналогичный Тошибе, но в другом корпусе SI09AFTG
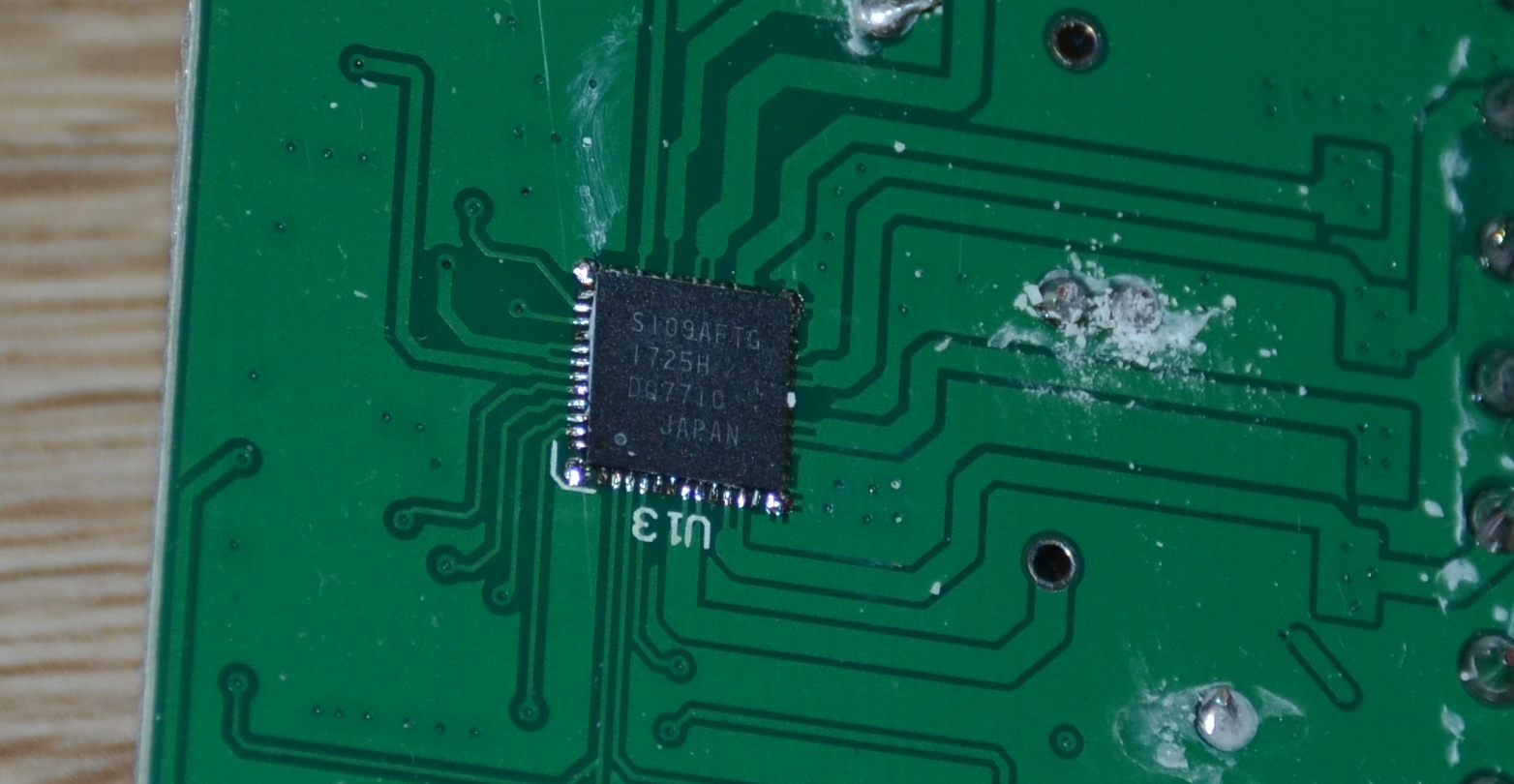

В обоих случаях присутствует гальваническая (оптическая) развязка.
Сравнение двух плат
Проведем небольшой тест драйверов.
Соберем небольшую схему с Arduino и двигателем Nema23 57HS8430.
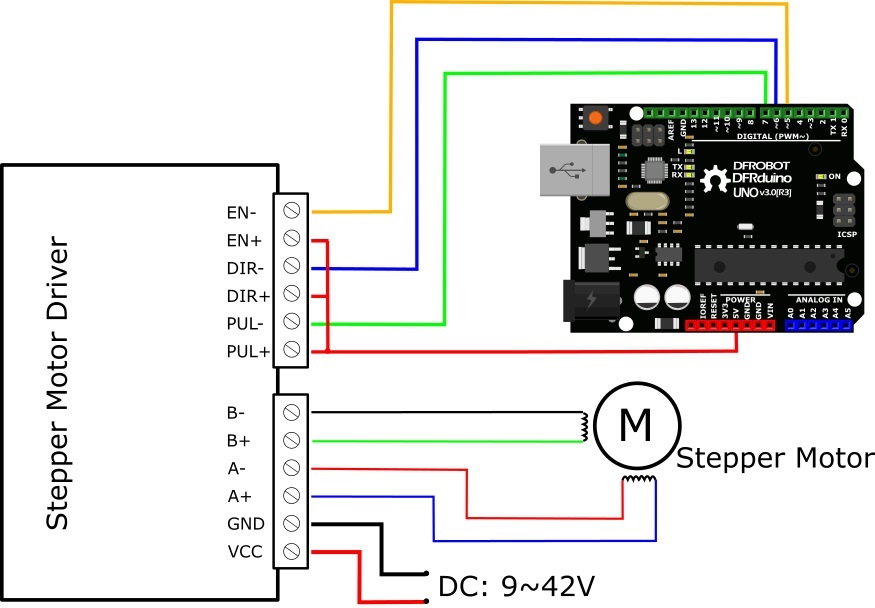
Загрузим скетч в Ардуино

int PUL=7; //define Pulse pin
int DIR=6; //define Direction pin
int ENA=5; //define Enable Pin
void setup() <
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (ENA, OUTPUT);
void loop() <
for (int i=0; i 
В целом покупка на Таобао комплектующих для различных самоделок оправдана, выгода по стоимости практически в два раза.
P.s. обратите внимание: в некоторых лотах есть платная местная доставка. Обычно это около $2. Имеет смысл покупать несколько лотов у одного продавца, стоимость местной доставки так и остается $2. В этом случае доставка «размазывается» по стоимости всего заказа.
Если есть вопросы по покупкам на Таобао или по посреднику Yoybuy — задавайте!
Tb6600 драйвер шагового двигателя схема
Изменение рабочего тока осуществляется с помощью регулятора Current regulation potentiometer. Он позволяет выбрать ток в диапазоне от 0.5 до 4.5А.
Выбор микрошага

Принудительный Enable 1:1 1:2 (A mode) 1:2 (B mode) 1:4 1:8 1:16
A и B mode — настройка изменения формы ШИМ. Подбирается эмпирическим путём.
Переключатель LATCH позволяет выбрать между автоматической и ручной перезагрузкой драйвера в случае возникновения ошибки. ON – автоматическая перезагрузка, OFF – ручная.
 |  |
| Схема подключения входов управляющтх сигналов с общим плюсом | Схема подключения входов управляющтх сигналов с общим минусом |
 | Общая схема подключения драйвера. Управляющие сигналы подключены с общим плюсом. |
 | Общая схема подключения драйвера. Управляющие сигналы подключены с общим минусом. |
 | Схема подключения драйвера к контроллеру с диференциальными выходами. |
Не горит индикатор питания
2) Низкое напряжение питания
1) Проверьте подключение к источнику питания
2) Увеличьте напряжение питания
Двигатель не вращается, нет удерживающего момента
1) Неправильное подключение двигателя
2) Нет разрешающего сигнала Enb
1) Правильно подключите двигатель
2) Инвертируйте сигнал Enable
Двигатель не вращается, есть удерживающий момент
Неверно подключен сигнал Step
Проверьте правильность подключения сигнала Step
Двигатель вращается в противоположном направлении
1) Неправильно подключена фаза ШД
2) Неверная полярность управляющего сигнала Dir
3) Установлен слишком низкий рабочий ток ШД
1) Поменяйте местами провода одной фазы ШД
2) Инвертируйте управляющий сигнал Dir
3) Правильно установите рабочий ток ШД
Настройка контроллера на ТВ6600.
Данные микросхемы являются развитием ТВ6560 и допускают номинальный ток на выходе до 4.5А (кратковременно 5А), что позволяет применять более мощные шаговые двигатели. Помимо этих микросхем в схемотехнику данных контроллеров внесены и другие изменения — более быстрые оптопары, возможность дискретной настройки выходных токов и т.д. Их внешний вид:

Иногда они выпускаются в металлическом кожухе, который выполняет для ТВ6600 роль радиатора. В этом случае на плате отсутствует локальный радиатор и прикрепленный на нем вентилятор обдува.
На плате также для каждой оси установлены переключатели шага и выходного тока:

Настройка шаговых двигателей осей.
В процессе настройки надо вычислить необходимое количество подаваемых импульсов (шагов) на шаговый двигатель для перемещения управляющей гайки червячной передачи станка на заданную единицу измерения — 1мм.
Например, имеем шаговый двигатель с шагом 1.8 градуса, червячную передачу с шагом резьбы 1.25мм и контроллер, установленный на “полный шаг”. Тогда при подаче на него 200 импульсов (шагов), его вал повернется на (1.8градуса х 200) = 360 градусов (полный оборот) и управляющая гайка червячной передачи сдвинется на 1.25мм.
Теперь, чтобы гайка сдвинулась на 1мм, надо соответственно уменьшить количество подаваемых на шаговый двигатель импульсов (шагов), которые определяются по формуле: 200/ 1.25мм = 160 импульсов (шагов). Т.е. при 160 импульсах(шагах) управляющая гайка при резьбе с ходом 1.25мм переместится на 1мм.
Если на контроллере установлен неполный шаг, например «полшага», то формула будет иметь следующий вид: 2х200/1.25мм = 320 импульсов (шагов).
Таким образом, изменяя степень “шага” в контроллере, а также зная ход резьбы червячной передачи, по аналогичной формуле можно в дальнейшем рассчитывать количество подаваемых на шаговый двигатель импульсов (шагов) для перемещения управляющей гайки на 1мм.
Учитывая, что наиболее оптимальная работа данного контроллера отмечена при установке “1/8 шага”, возьмем за основу:
— шаг резьбы червячной передачи -1.25мм;
— контроллер установлен на “1/8 шаг”, т.е. 1мм перемещения управляющей гайки будет соответствовать 8х200/1.25мм=1280 импульсов(шагов) шагового двигателя.
Примечание: перед началом “пусков” шаговых двигателей при выключенном питании на всех 3-х синих переключателях контроллера на ТВ6600 установим:
Current Setting
(выходной ток)