Схемы управления двигателями в функции времени
 Этот вид управления применяется тогда, когда все переключения в схеме электродвигателя осуществляют в определенные моменты времени, например при автоматизации процесса пуска электродвигателей без контроля частоты вращения или тока. Длительность интервалов обусловлена и может регулироваться уставками реле времени.
Этот вид управления применяется тогда, когда все переключения в схеме электродвигателя осуществляют в определенные моменты времени, например при автоматизации процесса пуска электродвигателей без контроля частоты вращения или тока. Длительность интервалов обусловлена и может регулироваться уставками реле времени.
Управление в функции времени получило наибольшее распространение в промышленности из-за простоты и надежности серийно выпускаемых электромагнитных и электронных реле времени .
Так, из рис. 1, а и б видно, что замыканием контакта К линейного контактора в цепь якоря включается все сопротивление реостата, равное R1 + R2 + R3, а включение секций пускового сопротивления может происходить через определенные интервалы времени t1, t2 и t3 при определенных частотах вращения двигателя n1, n2, n3 и при снижении пускового тока до заданного значения I2. Интервалы времени подбираются так, чтобы при каждом очередном закорачивании сопротивления ток двигателя не превышал бы допустимого I1.
При разгоне двигателя от n= 0 до n1 ток убывает до I2 в результате роста противоэлектродвижущей силы. Через промежуток времени t1 замыкается контакт К1, шунтирующий сопротивление R1, что вызывает уменьшение сопротивления реостата до R2+R3, новое увеличение тока до I1 и т. д. По окончании пуска двигатель разгоняется до номинальной частоты вращения, пусковой реостат полностью выведен.
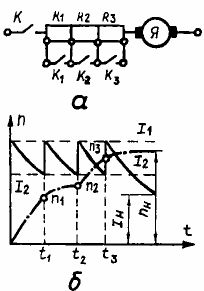
Рис. 1. Схемы управления двигателями в функции времени: а — пускового реостата двигателя постоянного тока, б — пусковая диаграмма
Рассмотрим некоторые схемы управления двигателя в функции времени.
При управлении асинхронным двигателем с фазным ротором в функции времени (рис. 2) выдержка времени, необходимая для закорачивания отдельных ступеней пускового реостата, обеспечивается маятниковыми реле времени, число которых равно числу ступеней. Работа схемы осуществляется следующим образом.
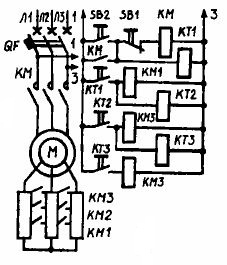
Рис. 2. Схема управления в функции времени асинхронного двигателя с фазным ротором
При нажатии на кнопку SB1 получает электропитание катушка линейного контактора КМ, включающего статор двигателя в сеть. Пусковой реостат при этом введен полностью. Вместе с контактором включается реле времени КТ1, которое через заданный интервал времени замыкает контакт в цепи катушки контактора КМ1.
Контактор срабатывает и замыкает первую секцию пускового реостата ротора. При этом включается реле времени КТ2, которое замыкает с замедлением свои контакты и включает катушку КМ2 и реле времени КТЗ. Контакты контактора КМ2 закорачивают вторую ступень КМ2 пускового реостата. Далее с замедлением времени срабатывает контакт реле КТЗ, включающий катушку КМЗ, которая закорачивает последнюю ступень пускового реостата КМЗ, и двигатель продолжает работать в дальнейшем как с короткозамкнутым ротором.
Останов двигателя производят кнопкой SB, а при перегрузках двигатель отключается расцепителями автоматического вводного выключателя QF. При этом отключается линейный контактор, его блок-контакт КМ и все контакторы ускорения и реле времени без выдержки времени. Схема готова к следующему пуску.
Для пуска вхолостую асинхронного двигателя повышенной мощности с переключением обмотки статора со звезды на треугольник можно использовать схему рис. 3. Переключение в этой схеме выполняется автоматически в функции времени. Нажатием кнопки SB2 обмотку статора включают в сеть контактором КМ. Одновременно подключаются к сети реле времени КТ и катушка KY, соединяющего обмотку статора звездой при помощи трех замыкающих контактов в силовой цепи.
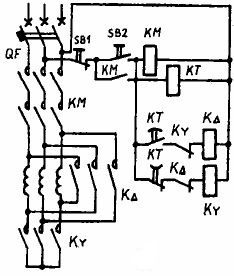
Рис. 3. Схема управления в функции времени асинхронного двигателя переключением со Y на Δ
Двигатель включается и разгоняется при пониженном напряжении. Через заданный промежуток времени реле КТ выключает контактор KY и включает катушку контактора КΔ соединяющего обмотку статора треугольником. Так как в цепи катушки КΔ находится блок-контакт KY, включение контактора КΔ не может произойти раньше выключения контактора KMY.
Ступенчатый пуск многоскоростных асинхронных двигателей является более экономичным и выполняется в функции времени. Рассмотрим пример ступенчатого пуска двухскоростного однообмоточного двигателя (рис. 4). Обмотка статора переключается с треугольника на двойную звезду с удвоением частоты вращения.
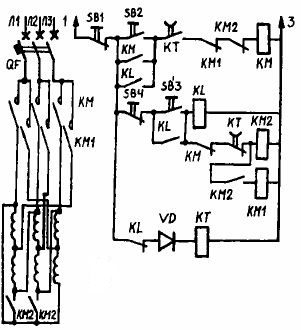
Рис. 4. Схема управления в функции времени ступенчатого пуска асинхронного двигателя
Контактором КМ двигатель включается на первую ступень частоты вращения, а контакторами КМ2 и КМ1 на вторую. Для включения двигателя на первую частоту вращения нажатием кнопки SB2 включается катушка контактора КМ и его силовые контакты КМ в главной цепи. Обмотка статора, соединенная треугольником, включается в сеть. Катушка реле времени КТ находится под напряжением, а ее замыкающий контакт (в цепи катушки КМ) замкнут.
 Ступенчатый пуск двигателя на вторую частоту вращения выполняется при помощи промежуточного реле К, цепь которого замыкается пусковой кнопкой SB3. Замыкающие контакты К шунтируют обе пусковые кнопки, а размыкающий контакт К отключает реле времени КТ. Замыкающий контакт КТ в цепи катушки КМ отключается с замедлением при возврате, поэтому катушка КМ в первый период пуска оказывается замкнутой, а двигатель включается на первую частоту вращения.
Ступенчатый пуск двигателя на вторую частоту вращения выполняется при помощи промежуточного реле К, цепь которого замыкается пусковой кнопкой SB3. Замыкающие контакты К шунтируют обе пусковые кнопки, а размыкающий контакт К отключает реле времени КТ. Замыкающий контакт КТ в цепи катушки КМ отключается с замедлением при возврате, поэтому катушка КМ в первый период пуска оказывается замкнутой, а двигатель включается на первую частоту вращения.
Блок-контакт КМ в цепи катушек КМ2 и КМ1 размыкается. Эти катушки отключены также размыкающим контактом КТ, который срабатывает с замедлением при возврате. Через заданный промежуток времени замыкающий контакт КТ отключит катушку КМ, а его размыкающий контакт включит катушки контакторов второй частоты вращения КМ1 и КМ2. Их главные контакты в силовой цепи переключат обмотку статора на двойную звезду и включат ее в сеть.
Следовательно, двигатель сначала разгоняется до первой частоты вращения, а затем автоматически переключается на вторую частоту вращения. Отметим, что предварительное соединение обмотки статора на двойную звезду и последующее включение ее в сеть выполняется сначала включением двух замыкающих силовых контактов КМ2, а затем трех замыкающих главных контактов КМ1. Такая последовательность включения достигается тем, что катушка КМ1 включается на напряжение через замыкающий блок-контакт КМ2. Останов двигателя выполняется нажатием кнопки «Стоп», обозначенной на схеме буквой SB1.
На рис. 5 изображена схема автоматического пуска двигателя постоянного тока параллельного возбуждения в функции времени. Включением автоматического выключателя QF двигатель подготавливается к пуску. Ток течет по цепи, состоящей из катушки реле времени КТ1, якоря двигателя М и двух ступеней пускового реостата R1 + R2.
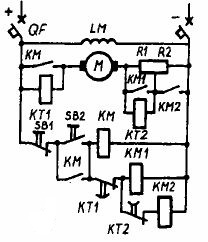
Рис. 5. Схема управления в функции времени двигателя постоянного тока параллельного возбуждения
Вследствие большого сопротивления катушки реле КТ1 ток в этой цепи весьма мал и никакого действия на двигатель не оказывает, но само реле срабатывает и его размыкающий контакт в цепи контактора КМ1 размыкается. В обмотку второго реле времени КТ2, включенную параллельно сопротивлению R1, ответвляется столь малый ток, что включиться оно не может. Обмотка возбуждения LM двигателя также оказывается включенной.
Пуск двигателя выполняется нажатием кнопки SB2. Включаются при этом контактор КМ и его контакт в цепи якоря двигателя. Большой пусковой ток ограничивается двумя ступенями реостата R1 и R2. Часть этого тока ответвляется в катушку реле КТ2, и оно, срабатывая, размыкает свой контакт КТ2 в цепи контактора КМ2. Одновременно с замыканием цепи якоря М рабочий контакт контактора КМ закорачивает катушку реле КТ1.
После установленного промежутка времени при возврате реле КТ1 замкнет свой контакт КТ1 в цепи контактора КМ1. Этот контактор своим рабочим контактом KM1 закоротит первую ступень R1 пускового реостата и обмотку реле времени КТ2. С замедлением при возврате его рабочие контакты КТ2 включат контактор КМ2, который своими рабочими контактами КМ2 закоротит вторую ступень R2 пускового реостата. На этом пуск двигателя заканчивается.
При нажатии на кнопку SB1 контактор КМ обесточится и отключит свой главный контакт в цепи якоря. Якорь остается под напряжением, но оказывается включен последовательно с обмоткой реле КТ1, благодаря чему через него проходит незначительный ток. Реле КТ1 сработает, разомкнет свой контакт в цепи контакторов КМ1 и КМ2, они отключатся и разомкнут свои контакты, закорачивающие сопротивления R1 и R2. Произойдет останов двигателя, но его обмотка возбуждения остается подключенной к сети и двигатель тем самым подготовлен для следующего пуска. Полное отключение двигателя выполняют выключением автоматического вводного выключателя ВВ.
Динамическое торможение двигателей также выполняется в функции времени. Для динамического торможения, например асинхронного двигателя, обмотка статора отключается от сети переменного тока и по одной из схем, показанных в табл.1, подключается к источнику постоянного тока. В лесной и деревообрабатывающей промышленности постоянный ток получают от специальных полупроводниковых выпрямителей. В этом случае отпадает необходимость в специальном источнике постоянного тока.
При включении обмотки статора по одной из схем (см. табл. 1) к выпрямителю в обмотке создается неподвижное в пространстве магнитное поле. В неподвижном поле по инерции продолжает вращаться ротор двигателя. В роторе двигателя при этом будут создаваться переменная ЭДС и ток, который будет возбуждать переменное магнитное поле. Переменное магнитное поле ротора при взаимодействии с неподвижным полем статора создает тормозной момент. При этом запасенная кинетическая энергия ротором и исполнительным механизмом превращается в цепи ротора в электрическую энергию, а последняя — в тепловую.
Тепловая энергия рассеивается из цепи ротора в окружающую среду. Выделение тепла в роторе будет нагревать двигатель. Количество выделенного тепла зависит от тока в обмотке статора при питании ее постоянным током. В зависимости от принятой схемы включения обмотки статора при питании ее постоянным током отношение тока к фазному току статора будет различным. Соотношения этих токов для различных схем включения показаны в табл. 1
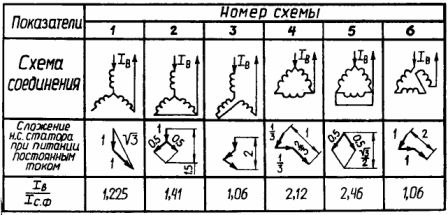
Схема динамического торможения асинхронного двигателя показана на рис. 6.
Пуск асинхронного двигателя
Пусковые свойства двигателей.
При пуске ротор двигателя, преодолевая момент нагрузки и момент инерции, разгоняется от частоты вращения п = 0 до п . Скольжение при этом меняется от sп = 1 до s. При пуске должны выполняться два основных требования: вращающий момент должен бить больше момента сопротивления (Мвр>Мс) и пусковой ток Iп должен быть по возможности небольшим.
В зависимости от конструкции ротора (короткозамкнутый или фазный), мощности двигателя, характера нагрузки возможны различные способы пуска: прямой пуск, пуск с использованием дополнительных сопротивлений, пуск при пониженном напряжении и др. Ниже различные способы пуска рассматриваются более подробно.
Прямой пуск.
Пуск двигателя непосредственным включением на напряжение сети обмотки статора называется прямым пуском. Схема прямого пуска приведена на рис. 3.22. При включении рубильника в первый момент скольжение s = l, а приведенный ток в роторе и равный ему ток статора
 , (3.37)
, (3.37)
максимальны (см.п.3.19 при s=1). По мере разгона ротора скольжение уменьшается и поэтому в конце пуска ток значительно меньше, чем в первый момент. В серийных двигателях при прямом пуске кратность пускового тока kI = IП / I1НОМ = ( 5,…,7), причем большее значение относится к двигателям большей мощности.

Значение пускового момента находится из (3.23) при s = 1:
 ,(3.38)
,(3.38)
Из рис. 3.18 видно, что пусковой момент близок к номинальному и значительно меньше критического. Для серийных двигателей кратность пускового момента МП/ МНОМ = (1.0,…,1.8).
Приведенные данные показывают, что при прямом пуске в сети, питающей двигатель, возникает бросок тока, который может вызвать настолько значительное падение напряжение, что другие двигатели, питающиеся от этой сети, могут остановиться.
С другой стороны, из-за небольшого пускового момента при пуске под нагрузкой двигатель может не преодолеть момент сопротивления на валу и не тронется с места. В силу указанных недостатков прямой пуск можно применять только у двигателей малой и средней мощности (примерно до 50 кВт).
Пуск двигателей с улучшенными пусковыми свойствами.
Улучшение пусковых свойств асинхронных двигателей достигается использованием эффекта вытеснения тока в роторе за счет специальной конструкции беличьей клетки. Эффект вытеснения тока состоит в следующем: потокосцепление и индуктивное сопротивление X2 проводников в пазу ротора тем выше, чем ближе ко дну паза они расположены (рис.3.23). Также X2 прямо пропорционально частоте тока ротора.
Следовательно, при пуске двигателя, когда s=1 и f2 = f1 = 50 Гц , индуктивное сопротивление X2 = max и под влиянием этого ток вытесняется в наружный слой паза. Плотность тока j по координате h распределяется по кривой, показанной на рис.3.24. В результате ток в основном проходит по наружному сечению проводника, т.е. по значительно меньшему сечению стержня, и, следовательно, активное сопротивление обмотки ротора R2 намного больше, чем при нормальной работе. За счет этого уменьшается пусковой ток и увеличивается пусковой момент МП (см. (3.37), (3.38) ).
По мере разгона двигателя скольжение и частота тока ротора падает и к концу пуска достигает 1 – 4 Гц. При такой частоте индуктивное сопротивление мало и ток распределяется равномерно по всему сечению проводника. При сильно выраженном эффекте вытеснения тока становится возможным прямой пуск при меньших бросках тока и больших пусковых моментах.
К двигателям с улучшенными пусковыми свойствами относятся двигатели, имеющие роторы с глубоким пазом, с двойной беличьей клеткой и некоторые другие.

Двигатели с глубокими пазами.
Как показано на рис.3.25, паз ротора выполнен в виде узкой щели, глубина которой примерно в 10 раз больше, чем ее ширина. В эти пазы-щели укладывается обмотка в виде узких медных полос. Распределение магнитного потока показывает, что индуктивность и индуктивное сопротивление в нижней части проводника значительно больше, чем в верхней части.

Поэтому при пуске ток вытесняется в верхнюю часть стержня и активное сопротивление значительно увеличивается. По мере разгона двигателя скольжение уменьшается, и плотность тока по сечению становится почти одинаковой.
В целях увеличения эффекта вытеснения тока глубокие пазы выполняются не только в виде щели, но и трапецеидальной формы. В этом случае глубина паза несколько меньше, чем при прямоугольной форме.
Двигатели с двойной клеткой.
В таких двигателях обмотки ротора выполняются в виде двух клеток (рис.3.26): во внешних пазах 1 размещается обмотка из латунных проводников, во внутренних 2 – обмотка из медных проводников.

Таким образом, внешняя обмотка имеет большее активное сопротивление, чем внутренняя. При пуске внешняя обмотка сцепляется с очень слабым магнитным потоком, а внутренняя – сравнительно сильным полем. В результате ток вытесняется во внешнюю клетку, а во внутренней тока почти нет.
По мере разгона двигателя ток из внешней клетки переходит во внутреннюю и при s =sНОМ протекает в основном по внутренней клетке. Ток во внешней клетке при этом сравнительно небольшой.
Результирующий пусковой момент, складывающийся из моментов от двух клеток, значительно больше, чем у двигателей нормальной конструкции, и несколько больше, чем у двигателей с глубоким пазом. Однако следует иметь в виду, что стоимость двигателей с двойной клеткой ротора выше.
Пуск переключением обмотки статора.
Если при нормальной работе двигателя фазы статора соединены в треугольник, то, как показано на рис.3.27, при пуске первоначально они соединяются в звезду.

Для этого сначала включается выключатель Q, а затем переключатель S ставится в нижнее положение Пуск. В таком положении концы фаз Х, Y, Z соединены между собой, т.е. фазы соединены звездой. При этом напряжение на фазе в √3 раз меньше линейного.
В результате линейный ток при пуске в 3 раза меньше, чем при соединении треугольником. При разгоне ротора в конце пуска переключатель S переводится в верхнее положение и, как видно из рис. 3.27, фазы статора пересоединяются в треугольник.
Недостатком этого способа является то, что пусковой момент также уменьшается в 3 раза, так как момент пропорционален квадрату фазного напряжения, которое в √3 раз меньше при соединении фаз звездой. Поэтому такой способ применим при небольшом нагрузочном моменте и только для двигателей, нормально работающих при соединении обмоток статора в треугольник.
Пуск при включении добавочных резисторов в цепь статора.(рис. 3.28)

Перед пуском выключатель (пускатель) находится в разомкнутом состоянии и замыкается выключатель Q1.
При этом в цепь статора включены добавочные резисторы RДОБ. В результате обмотка статора питается пониженным напряжением U1n = U1НОМ – InRДОБ. После разгона двигателя замыкается выключатель Q2 и обмотка статора включается на номинальное напряжение U1НОМ. Подбором RДОБ можно ограничить пусковой ток до допустимого.
Следует иметь в виду, что момент при пуске, пропорциональный U 2 1П, будет меньше и составляет (U1П / U1НОМ) 2 номинального. Важно отметить, что при этом способе пуска значительны потери в сопротивлении RДОБ (RДОБI 2 1n). Можно вместо резисторов RДОБ включить катушки с индуктивным сопротивлением ХДОБ, близким к RДОБ.
Применение катушек позволяет уменьшить потери в пусковом сопротивлении.
Автотрансформаторный пуск.
Кроме указанных способов можно применить так называемый автотрансформаторный пуск.
Соответствующая схема показана на рис.3.29.

Перед пуском переключатель S устанавливается в положение 1, а затем включается автотрансформатор и статор питается пониженным напряжением U1П. Двигатель разгоняется при пониженном напряжении и в конце разгона переключатель S переводится в положение 2 и статор питается номинальным напряжением U1ном.
Если коэффициент трансформации понижающего трансформатора n, тогда ток I на его входе будет в n раз меньше. Кроме того, пусковой ток будет также в n раз меньше, т.е. ток при пуске в сети будет в n 2 раз меньше, чем при непосредственном пуске.
Этот способ, хотя и лучше рассмотренных в п.3.14.7, но значительно дороже.
Пуск двигателя с фазным ротором.
Пуск двигателя с фазным ротором осуществляется путем включения пускового реостата в цепь ротора, как это показано на рис.3.30.

Начала фаз обмоток ротора присоединяются к контактным кольцам и через щетки подключаются к пусковому реостату с сопротивлением Rp.

Приведенное к обмотке статора сопротивление пускового реостата Rp рассчитывается так, чтобы пусковой момент был максимальный, т.е. равен критическому. Так как при пуске скольжение sП = 1, то sП = 1 = sК , равенство МП = М Пmaх = МК будет обеспечено. Тогда
 .
.
Пуск двигателя происходит по кривой, показанной на рис.3.31. В момент пуска рабочая точка на механической характеристике находится в положении а, а при разгоне двигателя она перемещается по кривой 1, соответствующей полностью включенному реостату.
При моменте, соответствующем точке е , включается первая ступень реостата и момент скачком увеличивается до точки b – рабочая точка двигателя переходит на кривую 2; в момент времени, соответствующей точке d, выключается вторая ступень реостата, рабочая точка скачком переходит в точку с и двигатель выходит на естественную характеристику 3 и затем в точку f. Реостат закорачивается, обмотка ротора замыкается накоротко, а щетки отводятся от колец.
Таким образом, фазный ротор позволяет пускать в ход асинхронные двигатели большой мощности при ограниченном пусковом токе. Однако этот способ пуска связан со значительными потерями в пусковом реостате.
Кроме того, двигатель с фазным ротором дороже двигателя с короткозамкнутым ротором. Поэтому двигатель с фазным ротором применяется лишь при больших мощностях и высоких требованиях к приводу.