Автоматическое регулирование возбуждения (АРВ)
Согласно Правилам технической эксплуатации все генераторы независимо от их мощности и напряжения должны иметь устройство форсировки возбуждения, а генераторы мощностью 3 МВт и выше должны быть также оснащены автоматическими регуляторами возбуждения (АРВ).
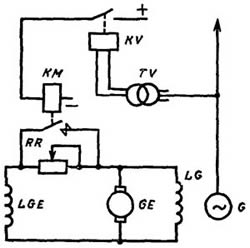
Рис.1. Схема релейной форсировки возбуждения генератора
Простейшим автоматическим устройством, предназначенным для быстрого увеличения возбуждения генератора в аварийном режиме, является релейная форсировка возбуждения (реле KV и контактор КМ на рис.1). Принцип действия форсировки состоит в том, что при значительном снижении напряжения на зажимах генератора (обычно ниже 85% номинального) реле минимального напряжения К V замыкает свои контакты и приводит в действие контактор форсировки КМ, который, срабатывая, закорачивает сопротивление шунтового реостата в цепи возбудителя RR. В результате ток возбуждения возбудителя быстро возрастает до максимального значения и возбуждение генератора достигает предельного значения.
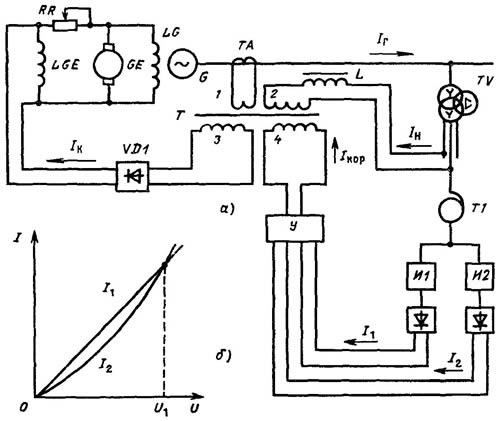
Рис.2. Схема APB генератора пропорционального действия
Широко распространенными APB являются устройства компаундирования в сочетании с корректором напряжения (рис.2).
Термин «компаундирование» обозначает автоматическое регулирование тока возбуждения машины в зависимости от тока статора. В нормальном режиме в случае увеличения тока статора (при активно-индуктивной нагрузке) напряжение генератора уменьшается, но устройство компаундирования автоматически увеличивает ток возбуждения возбудителя, а следовательно, и ток ротора генератора, благодаря чему напряжение на зажимах статора генератора восстанавливается.
Устройство компаундирования успешно работает и в аварийных режимах работы генератора, когда напряжение генератора снижается, а ток в обмотке статора значительно возрастает.
В схему компаундирования входят трансформаторы тока ТА, вторичные обмотки которых включены на промежуточный трансформатор Т, а также выпрямитель VD1, который выпрямляет ток компаундирования перед подачей его в обмотку возбуждения возбудителя LGE. Ток компаундирования IK без учета коррекции пропорционален IГ.
Компаундирование в чистом виде не может обеспечить достаточно точное поддержание напряжения генератора. Поэтому одновременно с регулированием возбуждения по току статора генератора применяется еще регулирование по напряжению статора. Для введения регулирующего импульса по напряжению трансформатор Т (универсальный трансформатор с подмагничиванием) оснащается еще обмотками 2 и 4 (рис.2,а).
Ток в обмотке 2 пропорционален UГ. Фаза тока IН подобрана так, что ток IН совпадает по фазе с реактивной слагающей тока генератора. Поэтому при чисто активной нагрузке МДС обмоток 1 и 2 взаимно сдвинуты на 90°, а при чисто реактивной нагрузке генератора они совпадают по фазе.
Вследствие этого ток компаундирования при неизменных величинах IГ и UГ получается тем больше, чем ниже cosφ или выше реактивная нагрузка генератора, — это так называемое фазовое компаундирование, которое обеспечивает более точное поддержание напряжения, так как ток компаундирования зависит не только от абсолютного значения тока генератора, но и от cosφ.
Через обмотку 4 подмагничивания Т производится окончательная коррекция тока компаундирования относительно заданного значения UГ при помощи корректора напряжения.
В общем случае в состав корректора напряжения входят измерительные элементы И1 и И2, включаемые в цепь трансформатора напряжения TV через установочный автотрансформатор Т1.
Принцип действия измерительного органа корректора поясняется рис.2,б. Выпрямленный ток I1 на выходе измерительного элемента И1 прямо пропорционален входному напряжению. Поэтому этот элемент называется линейным.
Выпрямленный ток I2 на выходе элемента И2, который называется нелинейным, имеет нелинейную зависимость от входного напряжения (рис.2,б). Оба тока I1 и I2 поступают в усилитель У, который реагирует на их разность и усиливает ее. Ток выхода корректора поступает в данном случае в обмотку 4 подмагничивания Т.
Из рис.2,б видно, что при снижении напряжения на входе измерительных элементов менее U1 под действием разности токов (I1-I2) ток выхода корректора увеличивается. Корректор поддерживает то напряжение генератора, которое соответствует напряжению U1 на входе измерительных элементов. С помощью автотрансформатора T1 можно изменять настройку корректора.
Рассмотренная схема АРВ относится к группе регуляторов пропорционального действия, реагирующих на отклонение тока статора и напряжения статора генератора.
Разработаны и находятся в эксплуатации регуляторы сильного действия, реагирующие на скорости изменения параметров регулирования, а также на их ускорение. Устройство АРВ сильного действия в сочетании с быстродействующими системами возбуждения, имеющими высокие скорости изменения напряжения возбуждения и большие значения потолочного напряжения возбудителя, обеспечивает значительное повышение устойчивости параллельной работы генератора. С целью повышения эффективности в закон регулирования вводятся также составляющие Δf и f’.
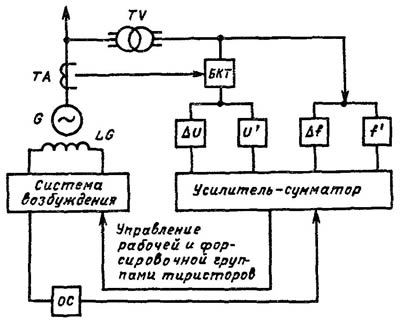
Рис.3. Структурная схема АРВ сильного действия
Структурная схема АРВ сильного действия приведена на рис.3. Автоматическое регулирование возбуждения состоит из двух основных звеньев: измерительного звена и усилителя-сумматора.
В измерительное звено входят блоки измерения напряжения (БИН) и частоты (БИЧ). Блок БИН содержит предвключенный элемент БКТ, в котором происходит автоматическая коррекция измеряемого напряжения в зависимости от реактивной составляющей тока генератора. После БКТ сигнал поступает на измерительные элементы ΔU (отклонение напряжения) и U’ (производная напряжения), выход которых пропорционален указанным величинам. Блок БИЧ имеет измерительные элементы, выход которых пропорционален Δf и f’.
Усилитель-сумматор представляет собой двухкаскадный магнитный усилитель, выходной сигнал которого направляется на управление рабочей и форсировочной группами тиристоров быстродействующей системы возбуждения (исполнительный элемент).
Для улучшения характеристик АРВ (повышения быстродействия и др.) в схему регулятора обычно вводят обратные связи ОС.
Устройства автоматического регулирования возбуждения синхронных машин
«УСТРОЙСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН»
«Автоматика в электрических системах»
1. Общие сведения об устройствах автоматического регулирования возбуждения синхронных машин. 3
2. Устройство токового компаундирования. 5
3. Электромагнитный корректор напряжения. 7
Список использованной литературы.. 10
1. Общие сведения об устройствах автоматического регулирования возбуждения синхронных машин
Напряжение является показателем качества электроэнергии. Отклонение напряжения в ту или иную сторону от номинального значения ухудшает условия работы энергоприемников потребителей: снижается производительность механизмов и КПД установок, сокращается срок службы электрооборудования, появляется брак выпускаемой продукции и прочее. Поэтому в нормальном режиме работы системы электроснабжения допускается отклонение напряжения у потребителей не более чем на ±5% номинального значения. В ненормальном (послеаварийном) режиме работы допускается снижение напряжения не более чем на 10% номинального.
Напряжение зависит от различных факторов, воздействуя на которые, можно поддерживать заданное его значение.
Напряжение на шинах низшего напряжения приемной подстанции (рис.1.1), т.е. на шинах, от которых получают питание потребители:
 , (1.1)
, (1.1)
где UЭС — напряжение на шинах высшего напряжения электростанции; Р, Q — активная и реактивная мощности, поступающие к подстанции; R, х — активное и реактивное сопротивления линии и трансформатора приемной подстанции; nт — коэффициент трансформации понижающего трансформатора.
Из (1.1) видно, что напряжение UП зависит от напряжения на шинах электрической станции, перетока мощности по ВЛ и коэффициента трансформации трансформатора понижающей подстанции. Следовательно, воздействовать на напряжения у потребителей можно, изменяя: напряжение на шинах электростанции UЭС; реактивную мощность Q, передаваемую по линии; коэффициент трансформации nт трансформатора понижающей подстанции.
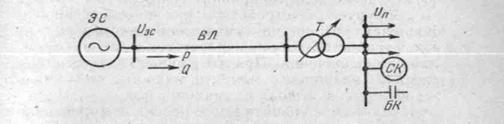 |
Рисунок 1.1 – Схема электроснабжения
Регулировать значение UЭС и изменять значение Q можно путем изменения тока возбуждения генераторов станции, а также синхронных компенсаторов и двигателей системы электроснабжения. Эту задачу выполняют устройства автоматического регулирования возбуждения (АРВ) синхронных машин.
Устройства АРВ могут быть выполнены на основе двух различных принципов автоматического управления. Первый принцип предусматривает создание разомкнутой автоматической системы управления, т.е. системы управления по возмущающему воздействию. Применительно к АРВ синхронных машин это означает, что возбуждение машины автоматически изменяется в зависимости от значения параметра возмущающего воздействия, влияющего на напряжение на зажимах машины. Если, например, в качестве возмущающего воздействия на вход АРВ подается значение тока статора Iст, то АРВ носит название токового компаундирования. Если в качестве возмущающих воздействий учитываются ток статора и фазовый сдвиг тока статора по отношению к напряжению статора, то имеет место фазовое компаундирование синхронной машины.
В соответствии со вторым принципом АРВ выполняется в виде замкнутой автоматической системы управления и представляет собой регулятор по отклонению напряжения, который реагирует на разность фактического и заданного значений напряжения статора синхронной машины и, воздействуя на систему возбуждения машины, стремится свести эту разность к нулю.
АРВ синхронной машины представляет собой, как правило, совокупность устройства компаундирования и регулятора (или корректора) напряжения.
2. Устройство токового компаундирования
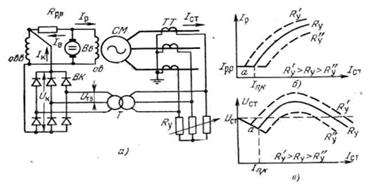
Рисунок 2.1 – Принципиальная схема токового компаундирования (а); характеристика компаундирования (б) и внешняя характеристика (в) компаундированной машины.
Напряжение на шинах синхронной машины Uст, работающей с перевозбуждением, т.е. в режиме выдачи реактивной мощности, снижается по мере увеличения тока статора Iст.
Поскольку значение ЭДС Eq пропорционально току возбуждения, то, изменяя в соответствии с изменением тока статора ток ротора машины, можно поддерживать значение Uст приблизительно постоянным независимо от значения тока Iст. Эту задачу и выполняет устройство токового компаундирования (УТК) (рис.2.1), которое состоит из выпрямителя ВК, подключенного через трансформатор Т ко вторичным цепям трансформаторов тока ТТ, установленных в статорной цени регулируемой синхронной машины. Напряжение на выходе Т может изменяться путем изменения установочного сопротивления Ry. Выпрямленное напряжение UK на выходе устройства токового компаундирования, пропорциональное току статора, подводится к обмотке возбуждения овв возбудителя Вб.
Зависимость напряжения UK от тока Iст регулируемой машины может быть представлена следующим образом:
 , (2.1)
, (2.1)
где К1, nTB — коэффициенты трансформации соответственно ТТ и ТВ; βBK = Uk/Utb — коэффициент преобразования выпрямителя ВК.
 ,(2.2)
,(2.2)
где Rовв — сопротивление овв; IВ,0 — ток в овв, соответствующий холостому ходу синхронной машины, то в обмотке возбуждения возбудителя проходит ток IК от устройства токового компаундирования.
Зависимость тока Iр ротора от тока Iст статора (нагрузки) компаундированной синхронной машины (характеристика компаундирования), а также внешняя характеристика компаундированной синхронной машины, поясняющие работу УТК, представлены на рис.2.1, б, в. Точка а этих характеристик соответствует значению тока статора IП, К, при котором начинает выполняться условие (2.2). Ток IП, К называется порогом компаундирования и изменяется с изменением сопротивления установочного резистора Ry. При токе нагрузки компаундированной машины ICT 0, а при UYAT>U0 Iио
Что такое синхронный двигатель и как он работает?
В качестве устройства преобразования электрической энергии в механическую в промышленности и быту используется синхронный электродвигатель. В сравнении с другими типами электрических машин он получил меньшее распространение, но в отведенных сферах является незаменимым фаворитом. В чем особенность синхронных агрегатов и как их применяют на практике, мы рассмотрим в данной статье.
Устройство
Конструктивно синхронный электродвигатель состоит из неподвижного элемента, подвижной части, обмоток различного назначения, может комплектоваться коллекторным узлом. Далее рассмотрим каждую составляющую синхронного агрегата более детально на рабочем примере (рисунок 1).
 Рис. 1. Устройство синхронного электродвигателя
Рис. 1. Устройство синхронного электродвигателя
- Статор или якорь – выполняется из электротехнической стали монолитным или наборным из шихтованного железа. Предназначен для размещения рабочей обмотки, проводит силовые линии электромагнитного поля, формируемого протекающими токами.
- Обмотка на статоре – изготавливается из медных проводников, в зависимости от типа статора синхронного электродвигателя может выполняться различными методами, способами намотки и расположения проводников. Применяется для подачи напряжения питания и формирования рабочего магнитного потока.
- Ротор с обмоткой возбуждения – предназначен для взаимодействия с магнитным полем статора. В результате подачи напряжения на обмотку возбуждения в роторе электродвигателя создается собственное магнитное поле, задающее состояние вращающегося элемента.
- Вал – используется для передачи вращательного усилия от электродвигателя к подключаемой к нему нагрузке. В большинстве случаев это основание, на котором крепиться шихтовка или полюса ротора, подшипники, кольца, пластины и другие вспомогательные элементы.
- Контактные кольца – применяются для подачи питания на обмотки ротора, но устанавливаются не во всех моделях синхронных агрегатов. Питание производиться через специальный преобразователь переменного напряжения в постоянное.
- Корпус – предназначен для защиты от воздействия внешних факторов, обеспечивает синхронному двигателю достаточную прочность и герметичность, в зависимости от условий его эксплуатации.
Принцип работы
В основе работы синхронного электродвигателя лежит взаимодействие магнитного потока, генерируемого рабочими обмотками с постоянным магнитным потоком. Наиболее распространенной моделью синхронной электрической машины является вариант с рабочей обмоткой на статоре и обмоткой возбуждения на роторе.
 Рис. 2. Принцип действия синхронного электродвигателя
Рис. 2. Принцип действия синхронного электродвигателя
Как видите на рисунке 2 выше, в обмотку статора подается трехфазное напряжение из сети, которое формирует переменное магнитное поле. На обмотки ротора электродвигателя подано постоянное напряжение, которое индуцирует такой же постоянный магнитный поток у полюсов. Для наглядности рассмотрим процесс на упрощенной модели синхронного агрегата (рисунок 3).
 Рис. 3. Принцип формирования потоков в синхронной электрической машине
Рис. 3. Принцип формирования потоков в синхронной электрической машине
При подаче питания на фазные витки статора электродвигателя первый пик амплитуды тока и ЭДС взаимоиндукции приходиться на фазу A, затем B и фазу C.
На графике показана периодичность чередования кривых в зависимости от времени:
- в точке 1 максимальная ЭДС EA формирует максимальный поток, а электродвижущие силы фаз EB и EC равны между собой и противоположны по знаку, они дополняют результирующую силу.
- в точке 2 пика достигает ЭДС EB, а электродвижущие силы фаз EA и EC становятся равны между собой и противоположны по знаку, они дополняют результирующую силу, в результате чего магнитное поле совершает вращательное движение.
- в точке 3 максимум приходиться на ЭДС EC, а электродвижущие силы фаз EB и EA вместе дополняют результирующую силу и снова смещают вектор поля по часовой стрелке.
Оборот поля статора происходит в течении периода, а за счет того, что ротор обладает собственным электромагнитным усилием постоянным во времени, то он синхронно следует за движением переменного магнитного поля, вращаясь вокруг заданной оси. В результате такого вращения происходит синхронное движение ротора вслед за сменой амплитуды ЭДС в витках рабочих обмоток, за счет этого явления электродвигатель и получил название синхронного. Наличие отдельного питания отразилось и на схематическом обозначении таких электрических машин (рисунок 4) в соответствии с ГОСТ 2.722-68.
 Рис. 4. Схематическое обозначение синхронного электродвигателя
Рис. 4. Схематическое обозначение синхронного электродвигателя
Отличие от асинхронного двигателя
Основным отличием синхронного электродвигателя от асинхронного заключается в принципе преобразования электрической энергии в механическое вращение. У синхронного электродвигателя процесс вращения ротора идентичен вращению рабочего электромагнитного поля, вырабатываемого трехфазной сетью. А вот у асинхронного рабочее поле самостоятельно наводит ЭДС в роторе, которая уже затем вырабатывает собственный поток взаимоиндукции и приводит вал во вращение. В результате чего асинхронные электрические машины получают разность во вращении рабочего поля и нагрузки на валу, что выражается физической величиной – скольжением.
В работе классические модели асинхронных электродвигателей с короткозамкнутым ротором:
- плохо переносят перегрузки;
- имеют сложности пуска со значительным усилием;
- меняют скорость вращения, в зависимости от нагруженности рабочего органа.
В некоторой степени эти недостатки преодолевает асинхронный двигатель с фазным ротором, но в полной мере избавиться от недостатков получается лишь синхронному агрегату.
 Рис. 5. Отличие асинхронного от синхронного электродвигателя
Рис. 5. Отличие асинхронного от синхронного электродвигателя
Разновидности
В современной промышленности и бытовых приборах синхронные электродвигатели используются для решения самых разнообразных задач. Как результат, существенно разнятся и их конструктивные особенности. На практике выделяют несколько критериев, по которым разделяются виды синхронных агрегатов. В соответствии с ГОСТ 16264.2-85 могут подразделяться по таким техническим характеристикам:
- питающему напряжению;
- частоте рабочего напряжения;
- количеству оборотов.
В зависимости от способа получения поля ротора выделяют такие типы синхронных электродвигателей:
- С обмоткой возбуждения на роторе – синхронизирующее усилие создается за счет подачи питания от преобразователя.
- С магнитным ротором – на валу устанавливается постоянный магнит, выполняющий те же функции, что и обмотка возбуждении, но без необходимости подпитки (см. рисунок 6).
 Рис. 6. Синхронный электродвигатель с постоянными магнитами
Рис. 6. Синхронный электродвигатель с постоянными магнитами
С реактивным ротором — конструкция выполнена таким образом, что в его сердечнике происходит преломление магнитных линий, приводящее всю конструкцию в движение (см. рисунок 7). Под воздействием силового поля поперечные и продольные составляющие в роторе не равны за счет чего пластины поворачиваются вслед за полем.
 Рис. 7. Пример реактивного ротора
Рис. 7. Пример реактивного ротора
В зависимости от наличия полюсов все синхронные электродвигатели можно подразделить на:
- явнополюсные – в конструкции четко видны обособленные полюса с обмотками, применяются для малых скоростей;
- неявнополюсные – полюс не выделяется, такие модели устанавливают для высоких скоростей;
В зависимости от расположения рабочих обмоток различают прямые (на статоре) и обращенные (рабочие обмотки на роторе).
Режимы работы
Большинство электрических машин обладают обратимой функцией, не составляют исключения и синхронные агрегаты. Их также можно использовать в качестве электрического привода или в качестве генератора, вырабатывающего электроэнергию. Оба режима отличаются способом воздействия на электрическую машину – подачу напряжения на рабочие обмотки или приведение в движение ротора за счет механического усилия.
Генераторный режим
Для производства электроэнергии в сеть используются именно синхронные генераторы. В большинстве случаев для этой цели используются электрические машины с фазными обмотками на статоре, что существенно упрощает процесс съема мощности и дальнейшей передачи ее в сеть. Физически генерация происходит при воздействии электромагнитного поля обмотки возбуждения синхронного генератора с обмотками статора. Силовые линии поочередно пересекают фазные витки и наводят в них ЭДС взаимоиндукции, в результате чего на клеммных выводах возникает напряжение.
Частота получаемого напряжения напрямую зависит от скорости вращения вала и вычисляется по формуле:
f = (n*p)/60 ,
где n – скорость вращения вала, измеряемая в оборотах за минуту, p – количество пар полюсов.
Синхронный компенсатор
В виду физических особенностей синхронного электродвигателя при холостом ходе аппарата он потребляет из сети реактивную мощность, что позволяет существенно улучшить cosφ системы, практически приближая его к 1.На практике режим синхронного компенсатора используется как для улучшения коэффициента мощности, так и для стабилизации параметров напряжения сети.
Двигательный режим
В синхронной машине двигательный режим осуществляется при подаче рабочего трехфазного напряжения на обмотки якоря. После чего электромагнитное поле якоря начинает толкать магнитное поле ротора, и вал приходит во вращение. Однако на практике двигательный режим осуществляется не так просто, так как мощные агрегаты не могут самостоятельно набрать необходимый ресурс скорости. Поэтому во время запуска используют специальные методы и схемы подключения.
Способы пуска и схемы подключения
Для запуска синхронного электродвигателя требуется дополнительное поле, независимое от воздействия сети. В то же время, на стартовом этапе запуск представляет собой асинхронный процесс, пока агрегат не достигнет синхронной скорости.
 Рис. 8. Схема пуска синхронного двигателя
Рис. 8. Схема пуска синхронного двигателя
При подаче напряжения на якорь возникает ток в его обмотках и генерация ЭДС в железе ротора, который обеспечивает асинхронное движение до того момента, пока не начнется питание обмоток возбуждения.
Еще одним распространенным вариантом пуска является использование дополнительных генераторов, которые могут располагаться на валу или устанавливаться отдельно. Такой метод обеспечивает дополнительное стартовое усилие за счет стороннего крутящего момента.
 Рис. 9. Генераторный способ пуска синхронного двигателя
Рис. 9. Генераторный способ пуска синхронного двигателя
Как видите на рисунке 9, начальное вращение мотора М осуществляется за счет генератора G, который призван вывести устройство на подсинхронную скорость. Затем генератор выводится из рабочей цепи путем размыкания контактов КМ или автоматически при установке рабочих характеристик. Дальнейшее поддержание синхронного режима происходит за счет подачи постоянного напряжения в обмотку возбуждения.
Помимо этого на практике используется схема пуска с полупроводниковыми преобразователями. На рисунке 10 приведен способ тиристорного преобразователя и с установкой вращающихся выпрямителей.
 Рис. 10. Тиристорная схема пуска синхронного двигателя
Рис. 10. Тиристорная схема пуска синхронного двигателя
В первом случае запуск синхронного электродвигателя характеризуется нулевым напряжением от преобразователя UD. За счет ЭДС скольжения через стабилитроны VD осуществляется открытие тиристоров VS. В цепь обмотки возбуждения вводится резистор R, предназначенный для предотвращения пробоя изоляции. По мере разгона электродвигателя ЭДС скольжения пропорционально снизится и произойдет запирание стабилитронов VD, цепочка заблокируется, и обмотка возбуждения получит питание постоянным напряжением через UD.
Применение
Область применения синхронных электрических машин охватывает производство электрической энергии на электростанциях. По видам генераторы подразделяются на турбинные, дизельные и гидравлические, в зависимости от способа приведения их во вращение.
Также их используют в качестве электродвигателей, которые могут переносить существенные перегрузки в процессе эксплуатации. Такие двигатели устанавливаются на вентиляторах, компрессорах, силовых агрегатах и прочем оборудовании. Отдельная категория электродвигателей применяется в точном оборудовании, где важна синхронизация операций и процессов.
Преимущества и недостатки
К преимуществам такого электродвигателя следует отнести:
- высокий cosφ, приближающийся по величине к 1, что в значительной мере превосходит асинхронные электродвигатели;
- более высокая механическая прочность за счет особенностей конструкции электродвигателя;
- зависимость момента вращения от напряжения линейная, а не квадратичная, поэтому колебания электродвигателя пропорционально снижаются;
- на валу электродвигателя присутствует постоянная скорость, не зависящая от прикладываемой нагрузки;
- может применяться для уменьшения реактивной составляющей в сети.
Среди недостатков синхронных электродвигателей выделяют:
- сложную конструкцию;
- более сложный пуск;
- необходимость использования вспомогательных устройств и блоков;
- такие электродвигатели сложнее регулировать по числу оборотов;
- ремонт и обслуживание также обойдется дороже, чем асинхронные электродвигатели.