Регулирование частоты вращения электродвигателей
Подписка на рассылку
Порядка 70 % потребляемой промышленностью мощности, приходится на электропривод. Огромное разнообразие технологических процессов диктует свои правила, вследствие чего, появилась необходимость в изменении скорости вращения электродвигателя непосредственно во время технологического процесса. В данной статье мы раскроем различные способы регулирования скорости вращения электродвигателей.
Параметры, изменив которые, мы изменим скорость двигателя переменного тока (ДПТ):
- частота напряжения;
- число пар полюсов;
- величина напряжения;
- добавочное сопротивление в цепи ротора;
- вентильный каскад.
Изменяемые параметры для ДПТ:
- напряжение питания;
- сопротивление цепи обмотки якоря;
- магнитный поток.
Методы регулирования частоты вращения электродвигателя
Далее мы подробно рассмотрим эти способы и их применимость к различным типам электродвигателей.
Частотное регулирование
Наиболее эффективный, постоянно совершенствующийся способ.
Применение: двигатели переменного тока (синхронные и асинхронные с кз ротором).
Корректируя частоту питающего напряжения, мы изменим угловую скорость магнитного поля статора, следовательно, скорость двигателя в значительном диапазоне, имея достаточно жесткие механические характеристики. Для сохранения в норме коэффициента мощности и допустимости кратковременных перегрузок, меняя частоту, следует изменять и саму величину питающего напряжения.


Преимущества способа:
- обширный диапазон регулировки;
- «жесткость» механических характеристик;
- минимум потерь «скольжения», мощности.
Недостаток — высокая стоимость (в последние годы становится менее актуально).
Регулирование изменением числа пар полюсов
Применение: т.к. промышленность не выпускает серийно синхронные двигатели с изменяемым количеством пар полюсов, будем считать, что способ актуален только для асинхронных двигателей (далее АД) с кз ротором.
Способ реализуется изменением числа пар полюсов у обмоток. Этого можно добиться, изготовив двигатель с двумя независимыми обмотками. Но этот метод приводит к удорожанию конструкции и увеличению размеров машины. Поэтому наиболее выгодным является увеличение числа пар полюсов без использования второй независимой обмотки.
Промышленностью выпускаются двухскоротсные, трёхскоростные и четырёхскоростные электродвигатели.
Достоинства:
- экономичность;
- «жёсткие» механические характеристики.
Недостатки:
- ограниченное количество возможных скоростей;
- ступенчатость переключения скоростей.

Изменение питающего напряжения
Применение: асинхронные двигатели.
Изменять напряжение на статоре можно, включая в его цепь резисторы (старый и неэкономичный способ), автотрансформаторы или тиристорные регуляторы.
При регулировании скорости изменением напряжения, критический момент пропорционален квадрату подводимого напряжения. Снижается устойчивость к кратковременным перегрузкам и КПД, поэтому метод предпочтителен при «вентиляторной» нагрузке. Еще один недостаток — малый диапазон регулирования.
Добавочное сопротивление в цепи ротора 

Применение: АД с фазным ротором.
При изменении сопротивления ротора прямо пропорционально изменяется скольжение. Но величина критического момента остается постоянной. Это позволяет подобрать сопротивления так, чтобы уравнять критический момент с пусковым, что благоприятно сказывается на пуске двигателя под нагрузкой.
Достоинства способа:
- простота реализации;
- критический момент = const;
Недостатки:
- большие потери (при изменении скорости половина мощности тратится на выделение тепла);
- малый диапазон;
- «мягкие» механические характеристики.
Асинхронный вентильный каскад
 Асинхронный вентильный каскад
Асинхронный вентильный каскадПрименение: АД с фазным ротором.
Смысл регулирования каскадными схемами заключается в подаче в цепь ротора добавочной ЭДС. Изменяя добавочную ЭДС ротора, мы изменяем ток ротора, а значит его момент и скорость. Создать добавочную ЭДС, помимо устройства вентильного каскада, может и ДПТ — машинно-вентильный каскад.
Достоинства:
- Минимум сопутствующей силовой и контактной аппаратуры;
- плавность регулировок;
- малая мощность управления.
Недостатки:
- стоимость;
- низкий коэффициент мощности;
- плохая устойчивость к перегрузкам.
Изменение напряжения питания якоря
Применение: любые ДПТ.
Способ можно использовать если источником электрической энергии является генератор. Реализовать от общей сети невозможно.
Достоинства:
- плавность регулировок;
- простота пусков и торможений;
- экономичность.
Недостатки:
- необходимость трехкратного преобразования энергии→низкий КПД;
- три электрические машины в системе;
- дорогая эксплуатация.
Введение добавочного резистора в цепь якоря

Применение: любые ДПТ.
Заключается в последовательном включении в цепь якоря регулировочного реостата. Но способ не получил распространения ввиду своей неэкономичности и плохого влияния на КПД двигателя, т.к. в цепи реостата теряется очень большое количество энергии.
Регулирование изменением магнитного потока
В цепь возбуждения двигателей параллельного и смешанного возбуждения подключается реостат. В машинах последовательного возбуждения изменение магнитного потока в обмотке возбуждения производится шунтированием этой обмотки регулируемым сопротивлением. Максимальная скорость вращения двигателя ограничивается лишь механической прочностью якоря. Скорость двигателя регулируется в диапазонах 2:1-5:1, в частных случаях 8-10:1.
Преимущества:
- минимальные потери→экономичность;
- широкий диапазон регулирования
Недостатки:
- невозможно бесконечно уменьшать ток в обмотке возбуждения, двигатель уйдет «в разнос».
Типовые схемы пуска синхронных электродвигателей
Синхронные двигатели получили широкое распространение в промышленности для электроприводов, работающих с постоянной скоростью (компрессоров, насосов и т.д.). В последнее время, вследствие появления преобразовательной полупроводниковой техники, разрабатываются регулируемые синхронные электроприводы.
Достоинства синхронных электродвигателей
Синхронный двигатель несколько сложнее, чем асинхронный, но обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного.
1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии , который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности ( cos фи) равным единице.Если для предприятия необходима выработка реактивной энергии, то с и нхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть.
2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя.
4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
Способы пуска синхронного электродвигателя
Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через реактор или автотрансформатор.
Пуск синхронного двигателя осуществляется как пуск асинхронного. Собственный пусковой момент синхронной машины мал, а у неявнополюсной равен нулю. Для создания асинхронного момента ротор снабжается пусковой беличьей клеткой, стержни которой закладываются в пазы полюсной системы. (В явнополюсном двигателе стержни между полюсами, естественно, отсутствуют.) Эта же клетка способствует повышению динамической устойчивости двигателя при набросах нагрузки.
За счет асинхронного момента двигатель трогается и разгоняется. Ток возбуждения в обмотке ротора при разгоне отсутствует. Машина пускается невозбужденной, так как наличие возбужденных полюсов осложнило бы процесс разгона, создавая тормозной момент, аналогичный моменту асинхронного двигателя при динамическом торможении.
При достижении так называемой подсинхронной скорости, отличающейся от синхронной на 3 — 5%, подается ток в обмотку возбуждения и двигатель после нескольких колебаний около положения равновесия втягивается в синхронизм. Явнополюсные двигатели за счет реактивного момента при малых моментах на валу иногда втягиваются в синхронизм без подачи тока в обмотку возбуждения.
В синхронных двигателях трудно одновременно обеспечить необходимые значения пускового момента и входного момента под которым понимают асинхронный момент, развиваемый при достижении скоростью 95% синхронной. В соответствии с характером зависимости статического момента от скорости, т.е. в соответствии с типом механизма, для которого предназначен двигатель, на электромашиностроительных заводах приходится варьировать параметры пусковой клетки.
Иногда для ограничения токов при пуске мощных двигателей уменьшают напряжение на зажимах статора, включая последовательно обмотки автотрансформатора или резисторы. Следует иметь в виду, что при пуске синхронного двигателя цепь обмотки возбуждения замыкается на большое сопротивление, превышающее сопротивление самой обмотки в 5 — 10 раз.
В противном случае под действием токов, наводимых в обмотке при пуске, возникает пульсирующий магнитный поток, обратная составляющая которого, взаимодействуя с токами статора, создает тормозной момент. Этот момент достигает максимального значения при скорости, несколько превышающей половину номинальной, и под его влиянием двигатель может приостановить разгон на этой скорости. Оставлять на время пуска цепь возбуждения разорванной опасно, так как возможно повреждение изоляции обмотки индуцируемыми в ней ЭДС.

Асинхронный пуск синхронного электродвигателя
Схема возбуждения синхронного двигателя с глухоподключенным возбудителем довольно проста и может применяться в том случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс
Асинхронный пуск синхронного двигателя производится присоединением статора к сети. Двигатель разгоняется как асинхронный до скорости вращения, близкой к синхронной.
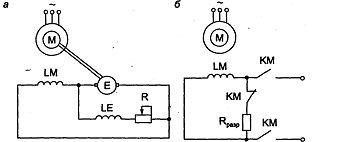
В процессе асинхронного пуска обмотка возбуждения замыкается на разрядное сопротивление, чтобы избежать пробоя обмотки возбуждения при пуске, так как при малой скорости ротора в ней могут возникнуть значительные перенапряжения. При скорости вращения, близкой к синхронной, срабатывает контактор КМ (цепь питания контактора на схеме не показана), обмотка возбуждения отключается от разрядного сопротивления и подключается к якорю возбудителя. Пуск заканчивается.
Слабым местом большинства электроприводов с синхронными двигателям, значительно усложняющим эксплуатацию и повышающим затраты, многие годы являлся электромашинный возбудитель. В настоящее время широкое распространение для возбуждения синхронных двигателей находят тиристорные возбудители . Они поставляются в комплектном виде.
Тиристорные возбудители синхронных электродвигателей более надежны и имеют более высокий к.п.д. по сравнению с электромашинными возбудителями. С их помощью легко решаются вопросы оптимального регулирования тока возбуждения для поддержания постоянства cos фи, напряжения на шинах, от которых питается синхронный двигатель, а также ограничение токов ротора и статора синхронного двигателя в аварийных режимах.
Тиристорными возбудителями комплектуется большинство выпускаемых крупных синхронных электродвигателей. Они выполняют обычно следующие функции:
- пуск синхронного двигателя с включенным в цепь обмотки возбуждения пусковым резистором,
- бесконтакное отключение пускового резистора после окончания пуска синхронного двигателя и защиту его от перегрева,
- автоматическую подачу возбуждения в нужный момент пуска синхронного электродвигателя,
- автоматическое и ручное регулирование тока возбуждения
- необходимую форсировку возбуждения при глубоких посадках напряжения на статоре и резких набросах нагрузки на валу синхронного двигателя,
- быстрое гашение поля синхронного двигателя при необходимости снижения тока возбуждения и отключениях электродвигателя,
- защиту ротора синхронного двигателя от длительной перегрузки по току и коротких замыканий.
Если пуск синхронного электродвигателя производится на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора. Возможно подключение обмотки возбуждения двигателя к якорю возбудителя последовательно с разрядным сопротивлением.
Процесс подачи возбуждения синхронному двигателю автоматизируется двумя способами: в функции скорости и в функции тока.
Система возбуждения и устройство управления синхронных двигателей должны обеспечивать:
- пуск, синхронизацию и остановку двигателя (с автоматической подачей возбуждения в конце пуска);
- форсировку возбуждения кратностью не менее 1,4 при снижении напряжения сети до 0,8U н ;
- возможность компенсации двигателем реактивной мощности, потребляемой (отдаваемой) смежными электроприемниками в пределах тепловых возможностей двигателя;
- отключение двигателя при повреждениях в системе возбуждения;
- стабилизацию тока возбуждения с точностью 5% установленного значения при изменении напряжения сети от 0,8 до 1,1;
- регулирование возбуждения по отклонению напряжения статора с зоной нечувствительности 8%;
- при изменении питающего напряжения статора синхронного двигателя от 8 до 20% ток изменяется от установленного значения до 1,4 I н , увеличение тока возбуждения для обеспечения максимальной перегружаемости двигателя.
На схеме, приведенной на рисунке, подача возбуждения синхронному двигателю осуществляется с помощью электромагнитного реле постоянного тока КТ (реле времени с гильзой). Катушка реле включается на разрядное сопротивление Rразр через диод VD. При подключении обмотки статора к сети в обмотке возбуждения двигателя наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения.
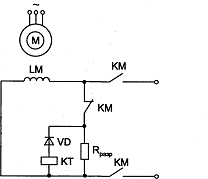
При пуске скольжение S = 1. По мере разгона двигателя оно уменьшается и интервалы между выпрямленными полуволнами тока возрастают; магнитный поток постепенно снижается по кривой Ф(t).
При скорости, близкой к синхронной, магнитный поток реле успевает достигнуть значения потока отпадания реле Фот в момент, когда через реле КТ ток не проходит. Реле теряет питание и своим контактом создает цепь питания контактора КМ (на схеме цепь питания контактора КМ не показана).
Рассмотрим контроль подачи возбуждения в функции тока с помощью реле тока. При пусковом токе срабатывает реле тока КА и размыкает свой контакт в цепи контактора КМ2.
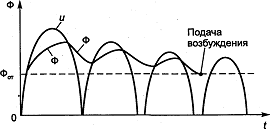
График изменения тока и магнитного потока в реле времени КТ
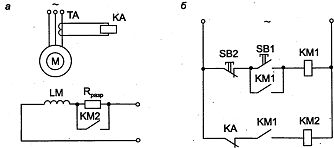
При скорости, близкой к синхронной, реле КА отпадает и замыкает свой контакт в цепи контактора КМ2. Контактор КМ2 срабатывает, замыкает свой контакт в цепи возбуждения машины и шунтирует резистор Rразр.