Синхронные реактивные двигатели (СРД)
Введение
 Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
Появление электрического двигателя во многом способствовало развитию промышленности и улучшению качества жизни населения. В рамках второй промышленной революции произошла популяризация всех видов электрических машин, и теперь для многих создается впечатление, что эти устройства всегда находились на службе у человечества. На сегодняшний день известно множество разновидностей электрических двигателей, от широко известных двигателей постоянного тока (ДПТ), асинхронных двигателей (АД), синхронных двигателей (СД) до шаговых двигателей (ШД). Несмотря на глобальные различные, все они выполняют одну функцию – являются электромеханическими преобразователями, то есть конвертируют электрическую энергию в механическую.
А теперь представьте себе электрический двигатель с максимально простой конструкцией ротора. Это сделать довольно-таки сложно из-за сложившихся стереотипов о функционировании электрической машины, но именно так можно вкратце описать набирающие популярность Синхронные Реактивные Двигатели (с англ. Synchronous Reluctance Machine, СРД). В последнее время на эти электрические машины все больше обращают внимание производители двигателей, а также инжиниринговые компании по всему миру, и не случайно. Давайте разберемся, что же из себя представляют СРД.
Синхронный Реактивный Электродвигатель – синхронная машина, вращающий момент которой обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов – такое определение дает ГОСТ 27471-87.
Принцип работы синхронного реактивного двигателя
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается когда ротор пытается установить свою наиболее магнито — проводящую ось (d-ось) с приложенным к нему полем, чтобы минимизировать сопротивление в магнитной цепи. Иными словами, вращающееся магнитное поле статора увлекает за собой ротор. Амплитуда потока статора управляется через ось d, тогда как ток, отвечающий за момент управляется через ось q. Оси приведены к статору двигателя.
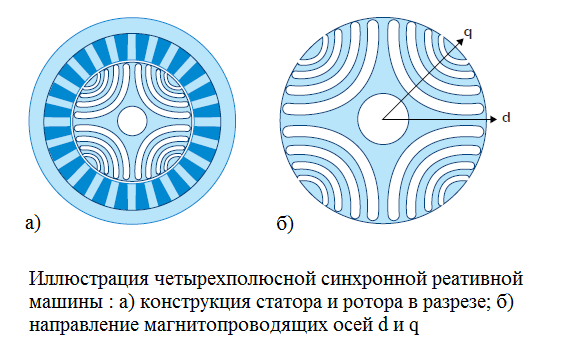
В рассмотренном исполнении ротора разницы между магнитными сопротивлениями осей добиваются за счет увеличения воздушного зазора по оси q. Амплитуда момента прямо пропорциональна разнице между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент. Математически это можно выразить с некоторыми допущениями, рассмотрев формулу электромагнитного момента для синхронной явнополюсной машины без возбуждения на роторе:
где m=3 для трехфазного исполнения статора, ω1- угловая скорость ротора, Xq -индуктивное сопротивление по оси q ротора, Xd — индуктивное сопротивление по оси d ротора, θ-угол между полем ротора и полем статора, характеризующий степень растянутости «магнитной пружины».
Таким образом, в отличие от синхронной машины с обмоткой возбуждения, синхронная реактивная машина в классическом представлении имела меньший момент, а также невысокий коэффициент мощности и коэффициент полезного действия (КПД). Объяснялось это значительным намагничивающим током статора, так как возбуждение происходит за счет реактивной составляющей тока. Пуск таких двигателей осуществлялся за счет демпфирующей короткозамкнутой обмотки, т.е. имел место асинхронный пуск синхронного двигателя. Но на сегодняшний день, СРД успешно эксплуатируются в комплекте с преобразователями частоты (ПЧ) YASKAWA GA700 и ПЧ GA500. Пуск происходит благодаря алгоритму, заложенному в ПЧ (управление током намагничивания id статора и током статора, отвечающим за момент iq), следовательно, необходимость асинхронного пуска устраняется. В итоге, коэффициент мощности и КПД у современных СРД заметно увеличился, а конструкция ротора стала максимально простой. В среднем у синхронных реактивных двигателей остается худший коэффициент мощности на 5-10% из-за принципиальных особенностей работы, но на 5- 8 % лучший КПД в сравнении с асинхронными двигателями как в номинальном режиме, так и при работе на всем диапазоне скоростей при регулировании скорости вниз от номинала.
Наибольший интерес у разработчиков систем электропривода вызвала конструкция СРД. Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой. То есть, статор двигателя идентичен статору широко используемого асинхронного двигателя.
Особенно интересен ротор, который представляет собой вал с болванкой из шихтованной стали. На роторе отсутствуют обмотки, а также постоянные магниты.
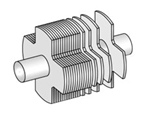
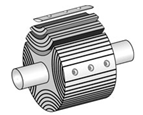
Выделяют три основных типа ротора реактивного двигателя: ротор с явно выраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.
 а) Ротор с явно выраженными полюсами
а) Ротор с явно выраженными полюсами
 б) Аксиально-расслоенный ротор
б) Аксиально-расслоенный ротор
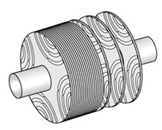 в) Поперечно-расслоенный ротор
в) Поперечно-расслоенный ротор
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие в них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет вращающейся МДС обмотки статора.
Так как, СРД – синхронная машина, то его механическая характеристика в разомкнутой системе будет абсолютно жесткой.
Достоинства и недостатки синхронного реактивного двигателя:
Преимущества СРД:
1. Простота и надежность ротора, состоящего из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки;
2. Низкий нагрев. Так как в роторе нет обмоток, поэтому через него не протекает активный ток с выделением тепла. Это положительно сказывается на сроке жизни подшипников, а также на коэффициенте полезного действия системы. Так как снижаются потери на нагрев, то номинальный ток двигателя может быть завышен, что позволяет получить (при аналогичной мощности) более высокий момент (на 20-40%), чем у асинхронного двигателя.
3. Отсутствие магнитов. Из-за этого снижается конечная цена двигателя, так как при производстве не используются редкоземельные элементы.
4. Низкий момент инерции ротора. Так как ротор представляет собой болванку без магнитов и обмоток, которые увеличивают этот показатель в асинхронных двигателях и двигателях с постоянными магнитами. Соответственно, уменьшается типоразмер двигателей. Из чего вытекает следующее преимущество.
5. Меньшие габариты при той же мощности в сравнении с АД.
6. Высокий КПД и cosφ (косинус фи). При работе от сети, а такие двигатели в старых системах работали от сети и снабжались дополнительной пусковой обмоткой на роторе, СРД демонстрировали не лучшие энергетические показатели, но применяя специализированный преобразователь частоты, например, YASKAWA GA700 и GA500, разработанный для работы с синхронными реактивными двигателями, картина в корне меняется. В таких преобразователях происходит разделение между сетью и питающим напряжением двигателя, а программное обеспечение позволяет корректировать выходной ток, создавая наиболее благоприятные условия работы двигателя (в GA700 режим EZOLV). Таким образом СРД оставляет за собой все преимущества, описанные выше, избегая недостатков возникавших ранее при работе от сети. Если все – таки происходит снижение коэффициента мощности, это может означать, что для данного применения должен быть выбран преобразователь на больший номинальный ток.
7. Абсолютно жесткая механическая характеристика в разомкнутой системе. Это говорит о том, что двигатель способен поддерживать скорость на заданном уровне с большой точностью, до тех пор, пока момент не превысит максимальное значение.
Недостатки СРД:
1. Пуск и работа СРД возможны только от преобразователя частоты. Бездатчиковая система управления отслеживания положения ротора является необходимым условием работы синхронного реактивного двигателя. Преобразователь в каждый момент времени отслеживает потребляемый ток двигателя, так как при повороте вала изменяется магнитное сопротивление в зазоре, и формирует магнитное поле в соответствии с этим изменением, добиваясь высокой производительности.
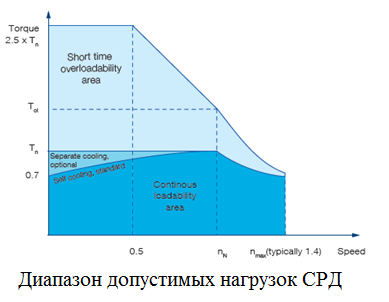
2. Низкий коэффициент мощности при работе с ослаблением поля. СРД демонстрируют лучшие энергетические показатели при работе в зоне насыщения. При выходе на повышенную скорость, необходимо уменьшить ток намагничивания машины id, в результате чего, заметно упадет момент двигателя, а коэффициент мощности резко снизится в следствие потребления большего реактивного тока. Поэтому для применений в которых осуществляется работа на повышенных скоростях такие двигатели лучше не использовать.
Заключение:
Синхронные реактивные двигатели являются перспективным направлением для интеграции в новые системы и для модернизации старых систем электропривода. Больший КПД на всем диапазоне скоростей в сравнении с СДПМ и АД способствует в пользу выбора этого двигателя при разработке новых систем, соответствующих международному стандарту энергоэффективности IE4. Простота конструкции ротора и проверенная технология изготовления статора позволяют такому двигателю легко найти свое применение в насосных агрегатах и вентиляторах, а также в применениях с постоянным моментом и регулированием скорости вниз от номинала. Единственной проблемой такого двигателя является потребление большего реактивного тока в сравнении с асинхронными двигателями, но при использовании частотного преобразователя YASKAWA GA700 и GA500 этот недостаток легко устраняется.
Синхронный реактивный двигатель
 Из всех типов синхронных двигателей малой мощности реактивный двигатель является самым распространенным. Он применяется в системах синхронной связи, в установках звукового кино, звукозаписывающих аппаратах (магнитофоны), в лентопротяжных механизмах магнитной памяти вычислительных устройств, в медицинской и бытовой аппаратуре — как приводной двигатель. Двигатель прост по конструкции и дешев.
Из всех типов синхронных двигателей малой мощности реактивный двигатель является самым распространенным. Он применяется в системах синхронной связи, в установках звукового кино, звукозаписывающих аппаратах (магнитофоны), в лентопротяжных механизмах магнитной памяти вычислительных устройств, в медицинской и бытовой аппаратуре — как приводной двигатель. Двигатель прост по конструкции и дешев.
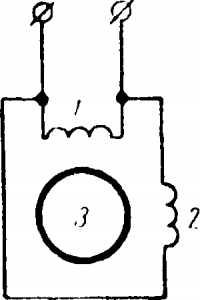
Синхронный реактивный двигатель мало отличается от асинхронного с коротко-замкнутым ротором. На статоре имеются две обмотки, последовательно с одной из которых включен конденсатор (рис. 12-5) для получения вращающегося магнитного потока. Ротор — с короткозамкнутой обмоткой, но имеет на окружности осевые вырезы (рис. 12-12), благодаря чему образуются выступы, без которых двигатель в синхронном режиме работать не может. Принцип работы двигателя объясняется на рис. 12-13.
Рис. 12-11. Однофазный асинхронный двигатель с встроенным пусковым сопротивлением.
Четырехполюсный поток заменен условно полюсами магнитов. Если между ними поместить ротор в виде цилиндра, то он будет находиться в покое при любом положении.
Однако в том случае, когда он имеет выступы по числу полюсов, он будет в равновесии только в двух положениях: когда угол между осями полюсов и осями выступов равен нулю (ϴ = 0) или когда этот угол равен 90 эл. град (рис. 12-13, а и 12-13, б). Однако в последнем случае равновесие неустойчивое. При малейшем отклонении от него ротор возвращается в положение, соответствующее углу ϴ = 0, при котором магнитное сопротивление наименьшее. Если полюсы (поток) начнут вращаться (рис. 12-13, в) и появляется угол рассогласования 8, то ротор всегда будет вращаться синхронно с потоком (с полюсами), так как будет существовать усилие, стремящееся уме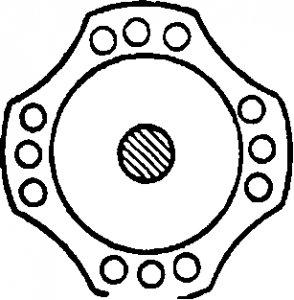 ньшить угол ϴ.
ньшить угол ϴ.
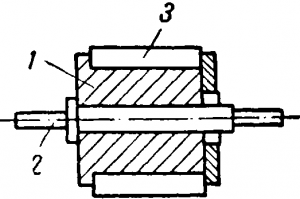
Рис. 12-12. Ротор однофазного синхронного реактивного двигателя.
Для того чтобы получилось указанное положение, ротор должен быть предварительно приведен во вращение со скоростью, близкой к синхронной. Поэтому ротор снабжен короткозамкнутой обмоткой и в начале двигатель работает, как асинхронный, а затем ротор втягивается в синхронизм. Ток в обмотке ротора становится равным нулю и двигатель вращается за счет реактивного момента между вращающимся потоком и выступами ротора. Эти двигатели в однофазном исполнении строятся на мощность до двух десятков ватт при п1 = 1 000 ÷ 1 500 об/мин. Недостатки этих двигателей — большой вес на единицу мощности, низкие к. п. д. и cos φ.
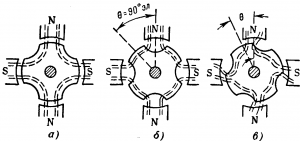
Рис. 12-13. Принцип работы однофазного синхронного реактивного двигателя.
ДВУХФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ С ФЕРРОМАГНИТНЫМ ПОЛЫМ ИЛИ МАССИВНЫМ РОТОРОМ
Этот двигатель имеет обычную двухфазную обмотку и ферромагнитный ротор в виде полого, или сплошного массивного цилиндра. Так как вращающийся магнитный поток замыкается через ферромагнитный ротор, то внутренний статор подобно показанному на рис. 12-6, отсутствует. Вращающийся поток наводит в поверхности ротора вихревые токи, которые совместно с потоком создают вращающий момент. Активное сопротивление ротора велико (r2 > х2), что обеспечивает большой пусковой момент, устой чивость работы двигателя на всем диапазоне работы и отсутствие самохода. Механические и регулировочные характеристики (рис 12-9 и 12-10) близки к прямолинейным и тем ближе, чем больше частота питающей сети. Скорость двигателя широко регулируется, а конструкция проста и надежна в эксплуатации. Недостаток двигателя — малые к. п. д. и cos φ. Двигатели широко применяются в схемах автоматики при мощности 5—300 вт и являются конденсаторными двигателями.
В тех устройствах, где стремятся увеличить момент инерции вращающихся частей (магнитофоны, гироскопы), указанные двигатели применяются в обращенном исполнении, когда обмотка статора помещается неподвижно на цилиндре, подобном показанному на рис. 12-7, а ротор в виде стального полого цилиндра вращается вокруг статора.
ОДНОФАЗНЫЙ АСИНХРОННЫЙ ДВИГАТЕЛЬ СО ВСТРОЕННЫМ ПУСКОВЫМ СОПРОТИВЛЕНИЕМ
Для пуска такого двигателя требовалось включение конденсатора, который даже при мощностях двигателя 50—200 вт должен иметь емкость 20—30 мкф. Размеры этого конденсатора обычно превышают размеры двигателя, что совершенно исключает их применение для многих схем автоматики.
Двигатель данного типа работает без конденсатора (рис. 12- 11) и устроен следующим образом. Статор двигателя, подобно показанному на рис. 10-31, имеет две обмотки. Рабочая обмотка 1 занимает дне трети пазов статора, имеет большое; число витков и обладает большим индуктивным сопротивлением. Пусковая обмотка 2 лежит в оставшейся части пазов и при малом числе витков имеет большое активное сопротивление по сравнению с индуктивным. Таким образом, по обмоткам, смещенным на 90 эл. град, протекают два тока, сдвинутые по фазе почти на четверть периода и образуют вращающийся маг нитный поток, увлекающий ротор 3. Эти двигатели выгодно отличаются от трехфазных с пусковой емкостью по своим пусковым характеристикам и строятся при р = 1 —2 на мощности 18 —600 вт в закрытом обдуваемом исполнении.
ТРЕХФАЗНЫЙ И ОДНОФАЗНЫЙ СИНХРОННЫЕ ГИСТЕРЕЗИСНЫЕ ДВИГАТЕЛИ
Указанные выше недостатки реактивных синхронных двигателей заставляют при малых мощностях (3—20 вт) применять гистерезисные синхронные двигатели. Двигатель имеет трехфазную или однофазную (рабочую и пусковую) обмотку статора и массивный (или шихтованный) ферромагнитный ротор.
Однако если для электрических машин обычно применяется сталь с узкой петлей гистерезиса, то для ротора гистерезисного двигателя применяется магнитно-твердый материал — викеллой с широкой петлей гистерезиса. Для удешевления ротор делается сборным (рис. 12-14) и состоит из втулки 1, сидящей на валу 2, и наружного цилиндра 3 из магнитно-твердого материала.
Рис. 12-14. Ротор синхронного гистерезисного двигателя.
Если представить, что ротор помещен во вращающийся магнитный поток, который на рис: 12-15 заменен двумя полюсами то в его наружном цилиндре элементарные магнитики вследствие молеку лярного трения не смогут мгновенно поворачиваться вслед за осью вращающегося потока. На эти магнитики будут действовать тангенциальные силы FT и создавать гистерезисный момент Мг.

Рис. 12-15. Принцип работы синхронного гистерезисного двигателя.
Ротор будет увлекаться с синхронной скоростью вслед за потоком. Между осью вращающегося потока и осью элементарных магнитиков образуется угол рассогла сования ϴ, который зависит только от коэрцитивной силы материала.
При пуске двигателя результирующий момент состоит из суммы: гистерезисного момента и момента, создаваемого вихревыми токами Мв. Поэтому пусковой момент значителен. В нормальном режиме двигатель вращается синхронно за счет гистерезисного момента, так как при синхронной скорости вихревые токи в роторе отсутствуют.
Статья на тему Синхронный реактивный двигатель