Принцип работы синхронного двигателя
Принцип работы синхронного двигателя
В целом, электрический двигатель представляет собой электромеханическое устройство, которое преобразовывает электрическую энергию в механическую.
По типу подключения двигатели бывают однофазные и 3-х фазные. Среди 3-х фазных двигателей наиболее распространенными являются индукционные (асинхронные) и синхронные электродвигатели.
Когда в 3-х фазном двигателе электрические проводники располагаются в определенном геометрическом положении (под определенным углом относительно друг друга), возникает электрическое поле. Образованное электромагнитное поле вращается с определенной скоростью, которая называется синхронной скоростью.
Если в этом вращающемся магнитном поле присутствует электромагнит, он магнетически замыкается с этим вращающимся полем и вращается со скоростью этого поля. Фактически, это нерегулируемый двигатель, поскольку он имеет всего одну скорость, которая является синхронной, и никаких промежуточных скоростей там быть не может. Другими словами, он работает синхронно с частотой сети.
Ниже дана формула синхронной скорости:
Строение синхронного двигателя
Его строение практически аналогично 3-фазному асинхронному двигателю, за исключением того факта, что на ротор подается источник постоянного тока.
На рисунке показано устройство этого типа двигателя. На статор подается 3-х фазное напряжение, а на ротор – источник постоянного тока.
Строение синхронного двигателя
Основные свойства синхронных двигателей:
- Синхронные электродвигатели не являются самозапускающимся механизмом. Они требуют определенного внешнего воздействия, чтобы выработать определенную синхронную скорость.
- Двигатель работает синхронно с частотой электрической сети. Поэтому при обеспечении бесперебойного снабжения частоты он ведет себя так, как двигатель с постоянной скоростью.
- Этот двигатель имеет уникальные характеристики, функционируя под любым коэффициентом мощности. Поэтому они используются для увеличения фактора силы.
Видео: Строение и принцип работы синхронного двигателя
Принципы работы синхронного двигателя
Электронно-магнитное поле синхронного двигателя обеспечивается двумя электрическими вводами. Это обмотка статора, которая состоит из 3-х фаз и предусматривает 3 фазы источника питания и ротор, на который подается постоянный ток.
3 фазы обмотки статора обеспечивают вращение магнитного потока. Ротор принимает постоянный ток и производит постоянный поток. При частоте 50 Гц 3-х фазный поток вращается около 3000 оборотов в 1 минуту или 50 оборотов в 1 секунду. В определенный момент полюса ротора и статора могут быть одной полярности (++ или – – ), что вызывает отталкивания ротора. После этого полярность сразу же меняется (+–), что вызывает притягивание.
Но ротор по причине своей инерции не в состоянии вращаться в любом направлении из-за силы притяжения или силы отталкивания и не может оставаться в состоянии простоя. Он не самозапускающийся.
Чтобы преодолеть инерцию силы, необходимо определенное механическое воздействие, которое вращает ротор в том же направлении, что и магнитное поле, обеспечивая необходимую синхронную скорость. Через некоторое время происходит замыкание магнитного поля, и синхронный двигатель вращается с определенной скоростью.
Способы запуска
- Пуск синхронного двигателя при помощи вспомогательного двигателя. Синхронный двигатель механически соединяется с другим двигателем. Это может быть либо 3-х фазный индукционный двигатель, либо двигатель постоянного тока. Постоянный ток изначально не подается. Двигатель начинает вращаться со скоростью, близкой к синхронной скорости, после чего подается постоянный ток. После того, как магнитное поле замыкается, связь со вспомогательного двигателя прекращается.
- Асинхронный пуск. В полюсных наконечниках полюсов ротора устанавливается дополнительная короткозамкнутая обмотка. При включении напряжения в обмотку статора возникает вращающееся магнитное поле. Пересекая короткозамкнутую обмотку, которая заложена в полюсных наконечниках ротора, это вращающееся магнитное поле индуцирует в ней токи, который взаимодействуя с вращающимся полем статора, приводят ротор во вращение. Когда достигнута синхронная скорость, ЭДС и крутящийся момент уменьшается. И наконец, когда магнитное поле замыкается, крутящий момент также сводится к нулю. Таким образом, синхронность вначале запускается индукционным двигателем с использованием дополнительной обмотки.
Применение
- Синхронный двигатель используется для улучшения коэффициента мощности. Синхронные двигатели широко применяются в энергосистеме, поскольку они работают при любом коэффициенте мощности и имеют экономичные эксплуатационные показатели.
- Синхронные двигатели находят свое применение там, где рабочая скорость не превышает 500 об / мин и требуется увеличить мощность. Для энергетической потребности от 35 кВт до 2500 кВт, стоимость, размер, вес и соответствующего индукционного двигателя будет довольно высоким. Такие двигатели часто используются для работы поршневых насосов, компрессоров, прокатных станков и другого оборудования.
Устройство и принцип действия синхронного двигателя
Отличие от асинхронного мотора
Главное отличие синхронной машины заключается в том, что скорость вращения якоря такая же, как и аналогичная характеристика магнитного потока.
И если в асинхронных моторах используется короткозамкнутый ротор, то в синхронных имеется на нем проволочная обмотка, к которой подводится переменное напряжение.
В некоторых конструкциях используются постоянные магниты. Но это делает двигатель дороже.
Если увеличивать нагрузку, подключаемую к ротору, частота вращения его не изменится. Это одна из ключевых особенностей такого типа машин. Обязательное условие – у движущегося магнитного поля должно быть столько же пар полюсов, сколько у электромагнита на роторе. Именно это гарантирует постоянную угловую скорость вращения этого элемента двигателя. И она не будет зависеть от момента, приложенного к нему.
Конструкция мотора
Устройство и принцип действия синхронных двигателей несложны.
Конструкция включает в себя такие элементы:
- Неподвижная часть – статор. На ней находится три обмотки, которые соединяются по схеме «звезда» или «треугольник». Статор собран из пластин электротехнической стали с высокой степенью проводимости.
- Подвижная часть – ротор. На нем тоже имеется обмотка. При работе на нее подается напряжение.
Между ротором и статором имеется прослойка воздуха. Она обеспечивает нормальное функционирование двигателя и позволяет магнитному полю беспрепятственно воздействовать на элементы агрегата. В конструкции присутствуют подшипники, в которых вращается ротор, а также клеммная коробка, расположенная в верхней части мотора.
Как работает двигатель
Если кратко, принцип действия синхронного двигателя, как и любого другого, заключается в преобразовании одного вида энергии в другой. А конкретно – электрической в механическую. Работает мотор таким образом:
- На статорные обмотки подается переменное напряжение. Оно создает магнитное поле.
- На обмотки ротора также подается переменное напряжение, создающее поле. Если используются постоянные магниты, то это поле уже по умолчанию имеется.
- Два магнитных поля взаимопересекаются, противодействуют друг другу – одно толкает другое. Из-за этого двигается ротор. Именно он установлен на шарикоподшипниках и способен свободно вращаться, дать ему нужно только толчок.
Вот и все. Теперь остается только использовать полученную механическую энергию в нужных целях. Но требуется знать, как правильно вывести в нормальный режим синхронный двигатель. Принцип работы у него отличается от асинхронного. Поэтому требуется придерживаться определенных правил.
Для этого электродвигатель подключают к оборудованию, которое необходимо привести в движение. Обычно это механизмы, которые должны работать практически без остановок – вытяжки, насосы и прочее.
Синхронные генераторы
Обратная конструкция – синхронные генераторы. В них процессы протекают немного иначе. Принцип действия синхронного генератора и синхронного двигателя отличаются, но не существенно:
- На обмотку статора не подается напряжение. С нее оно снимается.
- На обмотку ротора подается переменное напряжение, которое необходимо для создания магнитного поля. Потребление электроэнергии крайне маленькое.
- Ротор электрогенератора раскручивается при помощи дизельного или бензинового двигателя либо же силой воды, ветра.
- Вокруг ротора имеется магнитное поле, которое двигается. Поэтому в обмотке статора индуцируется ЭДС, а на концах появляется разность потенциалов.
Но в любом случае требуется стабилизировать напряжение на выходе генераторной установки. Для этого достаточно запитать роторную обмотку от источника, напряжение которого постоянно и не изменяется при колебаниях частоты вращения.
Полюсы обмоток двигателя
В конструкции ротора имеются постоянные или электрические магниты. Их обычно называют полюсами. На синхронных машинах (двигателях и генераторах) индукторы могут быть двух типов:
Они различаются между собой только взаимным расположением полюсов. Для уменьшения сопротивления со стороны магнитного поля, а также улучшения условий для проникновения потока, используются сердечники, изготовленные из ферромагнетиков.
Эти элементы располагаются как в роторе, так и в статоре. Для изготовления используются только сорта электротехнической стали. В ней очень много кремния. Это отличительная особенность такого вида металла. Это позволяет существенно уменьшить вихревые токи, повысить электрическое сопротивление сердечника.
Воздействие полюсов
В основе конструкции и принципа действия синхронных двигателей лежит обеспечение влияния пар полюсов ротора и статора друг на друга. Для обеспечения работы нужно разогнать индуктор до определенной скорости. Она равна той, с которой вращается магнитное поле статора. Именно это позволяет обеспечить нормальную работу в синхронном режиме. В момент, когда происходит запуск, магнитные поля статора и ротора взаимно пересекаются. Это называется «вход в синхронизацию». Ротор начинает вращаться со скоростью, как у магнитного поля статора.
Запуск электродвигателей синхронного типа
Самое сложное в работе синхронного мотора – это его запуск.
Именно поэтому его используют крайне редко. В
едь конструкция усложняется за счет системы запуска.
На протяжении долгого времени работа синхронного двигателя зависела от разгонного асинхронника, механически соединенным с ним.
Что это значит? Второй тип двигателя (асинхронный) позволял разогнать ротор синхронной машины до подсинхронной частоты.
Обычные асинхронники не требуют специальных устройств для запуска, достаточно только подать рабочее напряжение на обмотки статора.
После того, как будет достигнута требуемая скорость, происходит отключение разгонного двигателя. Магнитные поля, которые взаимодействуют в электрическом моторе, сами выводят его на работу в синхронном режиме. Для разгона потребуется другой двигатель. Его мощность должна составлять примерно 10-15 % от аналогичной характеристики синхронной машины. Если нужно вывести в режим электродвигатель 1 кВт, для него потребуется разгонный мотор мощностью 100 Вт. Этого вполне достаточно, чтобы машина смогла работать как в режиме холостого хода, так и с незначительной нагрузкой на валу.
Более современный способ разгона
Стоимость такой машины оказывалась намного выше. Поэтому проще использовать обычный асинхронный мотор, пусть и много у него недостатков. Но именно его принцип работы и был использован для уменьшения габаритов и стоимости всей установки. При помощи реостата производится замыкание обмоток на роторе. В итоге двигатель становится асинхронным. А запустить его оказывается намного проще – просто подается напряжение на обмотки статора.
Во время выхода на подсинхронную скорость возможно раскачивание ротора. Но это не происходит за счет работы его обмотки. Напротив, она выступает в качестве успокоителя. Как только частота вращения будет достаточной, производится подача постоянного напряжения на обмотку индуктора. Двигатель выводится в синхронный режим. Но такой способ можно воплотить только в том случае, если используются моторы с обмоткой на роторе. Если там применяется постоянный магнит, придется устанавливать дополнительный разгонный электродвигатель.
Преимущества и недостатки синхронных моторов
Основное преимущество (если сравнивать с асинхронными машинами) – за счет независимого питания роторной обмотки агрегаты могут работать и при высоком коэффициенте мощности. Также можно выделить такие достоинства, как:
- Снижается ток, потребляемый электродвигателем, увеличивается КПД. Если сравнивать с асинхронным мотором, то эти характеристики у синхронной машины оказываются лучше.
- Момент вращения прямо пропорционален напряжению питания. Поэтому даже если снижается напряжение в сети, нагрузочная способность оказывается намного выше, нежели у асинхронных машин. Надежность устройств такого типа существенно выше.
Но вот имеется один большой недостаток – сложная конструкция. Поэтому при производстве и последующих ремонтах затраты окажутся выше. Кроме того, для питания обмотки ротора обязательно требуется наличие источника постоянного тока. А регулировать частоту вращения ротора можно только с помощью преобразователей – стоимость их очень высокая. Поэтому синхронные моторы используются там, где нет необходимости часто включать и отключать агрегат.
Регулирование частоты вращения синхронных двигателей




![]()
![]()
Частота вращения синхронного двигателя n2равна частоте вращающегося магнитного поля n1 = 60f1/р, следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2 р. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как, в отличие от асинхронного, здесь требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала (см. гл. 2). При больших мощностях такие условия имеют место только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма. Последнее достигается тем, что управление преобразователем частоты осуществляется от системы датчиков положения ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки θ, меньших 90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как такие двигатели могут получать питание от сети как постоянного, так и переменного тока.
Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя может быть выражен в виде
 . (1.46)
. (1.46)
При частотном регулировании обычно стремятся получить режим работы двигателя с cosφ = 1, когда в обмотке якоря имеют место минимальные потери энергии. Для этого ток якоря Iа должен поддерживаться постоянным и минимальным:
Из (1.47) следует, что при неизменных нагрузочном моменте (Мн = М = const) и потоке возбуждения (Фв = const), т.е. токе
 . (1.47)
. (1.47)
возбуждения (Iв = const), угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении частоты f1 изменяются э. д. с. Е, угловая скорость ротора ω1и индуктивное сопротивление хсн (или сопротивления xd и xq при явнополюсном роторе), т.е.
 . (1.48)
. (1.48)
Поэтому при частотах питающего напряжения f1отличных от номинальной частоты f1ном, формула электромагнитного момента [см. (1.35)] принимает вид:
 ,
,
Из (1.49) следует, что при неизменных значениях нагрузочного момента Мн= М и тока якоря 1а = [а мин необходимо выдерживать условие
 , (1.50)
, (1.50)
т.е. изменять напряжение Uп, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты f1. При соблюдении условия (1.50) все стороны треугольника ОАВ (рис. 1.50, а) будут изменяться пропорционально частоте, а угол θ останется неизменным. При изменении нагрузки необходимо в соответствии с (1.46) изменять поток возбуждения Фв, т.е. ток возбуждения Iв.

Вентильный двигатель. При питании вентильного двигателя от сети постоянного тока в преобразователе частоты должны применяться тиристоры с узлами принудительной коммутации. В двигателях малой мощности допустимо применение транзисторов. На рис. 1.51, а показана принципиальная схема питания вентильного двигателя от тиристорного преобразователя частоты.
Преобразователь частоты представляет собой автономный инвертор напряжения, который подключен к источнику постоянного тока и формирует трехфазное напряжение изменяющейся частоты; это напряжение подается на фазы А, В и С обмотки якоря двигателя. К каждой фазе может быть подведено положительное (тиристорами Т1, Т2 и Т3) и отрицательное (тиристорами Т4, Т5 и Т6) напряжения.
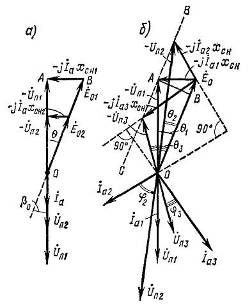
Рис. 1.50 – Векторные диаграммы синхронного двигателя, питаемого от преобразователя частоты при постоянном нагрузочном моменте: а – при постоянном угле θ и cosφ=l; б – при изменении угла θ
Если вначале пропускать ток через фазы А и В (открыты тиристоры Т1 и Т5), затем через фазы В и С (открыты тиристоры Т2 и Т6), далее через фазы С и А (открыты тиристоры Т3 и Т4) и т.д. в указанной последовательности, то в машине создается вращающееся магнитное поле. При изменении частоты переключения тиристоров изменяется частота напряжения, подаваемого на фазы обмотки якоря, а следовательно, и частота вращения ротора. Для замыкания реактивной составляющей тока якоря в преобразователе имеются диоды Д1—Д6, включенные параллельно тиристорам, но и в обратном направлении.
Коммутация тока в тиристорном преобразователе (переключение тока с одной фазы на другую) требует применения специальных коммутирующих узлов, так как тиристор является не полностью управляемым прибором. Для закрытия тиристора, включенного в цепь постоянного тока, необходимо кратковременно подать на него обратное напряжение определенной величины.
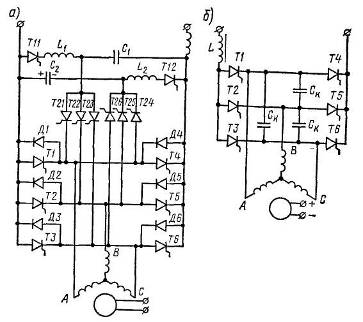
Рис. 1.51 – Принципиальные схемы питания вентильного двигателя от тиристорного преобразователя частоты с инвертором напряжения (а) и инвертором тока (б)
В рассматриваемом преобразователе применены два таких узла принудительной (или искусственной) коммутации – по одному для всех тиристоров, присоединяемых соответственно к положительному и отрицательному полюсам источника постоянного тока. Каждый узел состоит из контура L-C и вспомогательных тиристоров.
Закрытие тиристоров T1, Т2 и ТЗ, присоединенных к положительному полюсу, производится контуром L1-C1. При открытии вспомогательного тиристора Т11 конденсатор С1заряжается через индуктивность L1до величины двойного напряжения сети и запрает тиристор Т11. Затем открываются вспомогательные тиристоры Т21, Т22 или Т23 и подают на тиристоры T1, T2 или Т3 обратное (положительное) напряжение. При этом соответствующий тиристор запирается, а конденсатор С1разряжается через нагрузку.
Аналогично запираются тиристоры Т4, Т5 и Т6. Вначале открывают вспомогательный тиристор Т12 и через индуктивность L2 заряжают конденсатор С2. Затем, открывая вспомогательные тиристоры Т24, Т25 или Т26, присоединяют аноды тиристоров Т4, Т5 или Т6 к отрицательной обкладке конденсатора С2.
Напряжение, подаваемое к якорю вентильного двигателя от преобразователя частоты, является, так же как и при частотном регулировании асинхронного двигателя, несинусоидальным. Поэтому, чтобы уменьшить вредные воздействия высших гармоник напряжения, тока и потока, двигатель необходимо снабдить мощной демпферной обмоткой с малыми активным и индуктивным сопротивлениями (см. 1.17). В этом случае высшие гармоники оказывают на синхронный двигатель сравнительно небольшое воздействие. При наличии такой обмотки режимы работы вентильного двигателя можно рассматривать с учетом только первых гармоник тока и напряжения.
Режим работы вентильного двигателя зависит не только от величины тока возбуждения и соотношения между напряжением и частотой, как в обычном синхронном двигателе, регулируемом путем изменения частоты. Большое значение имеют также момент подачи напряжения на фазу двигателя и свойства преобразователя частоты.
В преобразователе частоты, основанном на использовании инвертора напряжения (рис. 1.51, а), величина выходного напряжения почти не зависит от режима работы двигателя. Поэтому регулирование необходимо вести при постоянстве угла θ (см. рис. 1.50, а). Последнее можно осуществить, определяя с помощью какого-либо датчика положение оси полюсов ротора (а следовательно, и направление вектора Ė) и регулируя подачу управляющих импульсов на тиристоры преобразователя так, чтобы напряжение Ùп подавалось на соответствующие фазы двигателя с некоторым углом опережения β ≈ θ (угол регулирования) по отношению к положению вектора Ė для данной фазы. Можно также определять ось результирующего магнитного потока и подавать питание на соответствующую фазу с требуемым углом β. Оба эти метода имеют свои преимущества и недостатки, обусловленные в основном особенностями применяемых датчиков и управляющих устройств.
В рассматриваемой схеме питания вентильного двигателя угол регулирования β практически полностью определяет угол θ. Если приближенно положить β ≈ θ, то при постоянных значениях частоты питающего напряжения и тока возбуждения (т.е. ω1 и э. д. с. Е) формула (1.35) принимает вид
 . (1.51)
. (1.51)
Следовательно, при изменении угла регулирования β ≈ θ для поддержания неизменным момента М нужно регулировать величину подводимого к двигателю от преобразователя напряжения Uп.
На рис. 1.50, б показано несколько положений векторов Ùп,
Iа и – jİaxснпри Е = const и различных значениях угла опережения β ≈ θ преобразователя частоты. При угле опережения β01 ≈ θ1 векторы Ùп1, İа1и – jIalxсннаправлены так, что ток İа1совпадает по фазе с напряжением Ùп1и является минимальным; при уменьшении угла β до β02 = θ2 напряжение, подводимое к двигателю, необходимо увеличить до Uп2; при этом ток İа2будет отставать от Ùп2на угол φ2; при увеличении угла β до β03 = θ3 необходимо уменьшать напряжение, подводимое к двигателю до Uп3, при этом ток İа3 будет опережать Ùп3на угол φ3. Так как величина Uпsinθ на векторной диаграмме (рис. 1.50, б) выражается отрезком АВ, то при изменении угла опережения конец вектора напряжения – Ùпперемещается по прямой ВАС, проходящей через точку А и параллельной вектору Ė. Ток якоря Iа при таком регулировании может существенно увеличиться, а максимальный момент двигателя в режиме, когда ток İа отстает от напряжения Ùппреобразователя (например, в положениях İа2 и Ùп2), уменьшится.
В преобразователе частоты, основанном на использовании инвертора тока, большая индуктивность L в цепи постоянного тока (рис. 1.51, б) позволяет считать ток якоря Iа практически неизменным (ток Iа имеет прямоугольную форму). Вследствие этого угол опережения β определяет положение вектора тока İа на диаграмме двигателя относительно положения вектора э. д. с. Ė.
Для того чтобы двигатель работал при соsφ = 1, вектор тока İа должен опережать вектор э. д. с. Ėна угол β, который в зависимости от нагрузки составляет 30–60°. Пусковой момент вентильного двигателя максимален при β = 0, поэтому в электроприводах с тяжелыми условиями пуска сначала регулирование ведут при β = 0, а с ростом частоты вращения начинают задавать некоторый угол опережения.
При необходимости питания вентильного двигателя от сети трехфазного тока могут применяться преобразователи частоты с непосредственной связью, т.е. без промежуточного выпрямления (рис. 1.52, а). Преимуществом таких преобразователей является отсутствие узлов принудительной коммутации, так как тиристоры перестают проводить ток после изменения направления напряжения в соответствующей фазе. Однако достаточно хорошее приближение формы выходного напряжения к синусоиде и четкое прекращение тока (в необходимый момент) может быть получено только в том случае, если источник трехфазного тока имеет частоту, в два-три раза большую, чем выходная частота преобразователя (рис. 1.52, б).
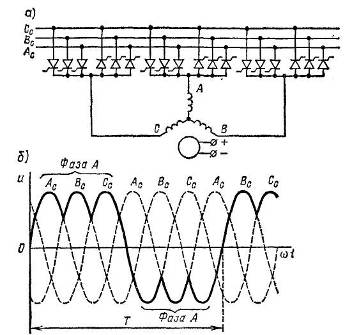
Рис. 1.52 – Принципиальная схема питания вентильного двигателя от преобразователя частоты с непосредственной связью (а) и форма кривой выходного напряжения преобразователя (б)
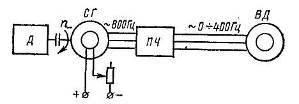
Рис. 1.53 – Схема электротрансмиссии автомобиля с вентильными двигателями
В качестве примера рассмотренного способа питания вентильного двигателя на рис. 1.53 приведена принципиальная схема электротрансмиссии мощного автомобиля. Дизель Д вращает вал трехфазного синхронного генератора СГ повышенной частоты (800 Гц) примерно с постоянной частотой. Напряжение генератора СГ, величина которого регулируется изменением тока возбуждения подается на тиристорный преобразователь частоты ПЧ, от которого пониженная частота подается к вентильным тяговым двигателям ВД, каждый из которых вращает ось соответствующего колеса. Частота тока на выходе преобразователя при этом регулируется в пределах от 0 до 400 Гц.
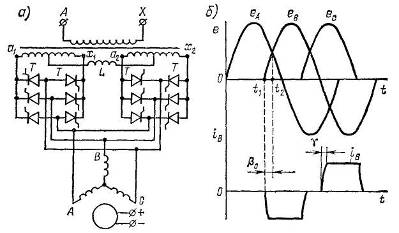
Рис. 1.54 – Принципиальная схема питания вентильного двигателя от однофазной сеги (а) и графики изменения э. д. с. и тока в фазе двигателя (б)
На рис 1.54, а приведена схема питания вентильного двигателя от однофазной сети, разработанная для мощных электровозов переменного тока. Однофазный трансформатор электровоза имеет две вторичные обмотки: а1 – х1и а2 – х2,средние точки которых соединены между собой через дроссель L. К каждой вторичной обмотке подключены шесть тиристоров Т, которые позволяют питать обмотку якоря двигателя трехфазным током, создавая вращающееся магнитное поле. При малой частоте вращения, когда частота выходного напряжения (машинная частота) не превосходит 10 Гц коммутация тиристоров (их запирание) происходит под действием’напряжения сети. При повышенных частотах коммутация осуществляется за счет э.д.с, индуктируемых в фазах якоря двигателя, так как включение тиристора, питающего очередную фазу производится с опережением– в момент времени t1(рис. 1.54, б). Иными словами, включение тиристора произойдет раньше, чем э д с в этой фазе приблизится к значению, при котором происходит естественная коммутация вентилей, включенных в соседние фазы (момент времени t2). Разность э.д.с. по контуру двух фаз, замкнутых накоротко включенными тиристорами одной полярности, обеспечивает закрытие тиристора, питающего ту фазу, в которой индуктируется большая э. д. с. Для нормального закрытия тиристоров практически приходится делать угол опережения β равным 30–60°, так как индуктивность фаз довольно велика и ток в тиристорах нарастает и спадает плавно.
Использование рассмотренного способа коммутации тиристоров вентильного двигателя дает возможность обеспечить работу при частоте, равной частоте питающей сети или даже большей ее (при так называемых «сверхсинхронных частотах вращения»). Для того чтобы при повышенных частотах вращения форма кривой тока в фазах двигателя была близка к прямоугольной, между вторичными обмотками трансформатора включают мощный дроссель L, обтекаемый током одного направления. Недостатками рассмотренной схемы питания вентильного двигателя являются сложность системы управления и пониженный к. п. д. (из-за наличия большого дросселя).
Следует отметить, что все типы вентильных двигателей не обладают еще достаточно высокой надежностью из-за сложности преобразователей частоты и их схем управления, которые имеют большое количество вентилей и других элементов, весьма чувствительных к перегрузкам. Тем не менее вентильные двигатели, как и асинхронные двигатели с частотным регулированием, являются весьма перспективными и в будущем можно ожидать широкое применение их в электроприводе. В настоящее время происходит быстрое совершенствование мощных тиристоров, интегральных схем и других полупроводниковых приборов, которое позволит обеспечить надежную работу преобразователей частоты.