Регулировка и стабилизация частоты вращения двигателя постоянного тока
Описано несложное устройство, позволяющее регулировать частоту вращения вала двигателя постоянного тока и поддерживать её установленное значение при изменении механической нагрузки на вал.
При разработке физического прибора потребовалось изготовить низкоскоростной привод вращения платформы, несущей различные датчики и другое оборудование. Необходимы были возможность оперативной регулировки частоты вращения и её стабилизация при изменении механической нагрузки.
Первый вариант привода состоял из малогабаритного электродвигателя постоянного тока серии ДПМ с редуктором из однозаходного стального червяка и текстолитового зубчатого колеса. Датчиком частоты вращения служил насаженный на вал двигателя диск с прорезями, входившими в зазор открытой оптопары.
Сигнал оптопары поступал на узел стабилизации, состоящий из генератора образцовой частоты, частотного дискриминатора и прочих необходимых элементов. Устройство отлично «держало» назначенную частоту вращения, не реагируя на внешние возмущения.
Но выявился крупный недостаток, о котором разработчики и не догадывались в начале работы. Привод сильно шумел. Шум шариковых подшипников двигателя, червячной пары передавался на закреплённые на платформе датчики и почти полностью «убивал» полезные сигналы. Попытки амортизировать привод не привели к успеху, так как при изменении момента сопротивления платформы вращению механизм раскачивался и равномерность вращения терялась.
Выход был найден в использовании привода программирующих колёс от видеомагнитофона (рис. 1). Вал установленного в нём двигателя вращается в подшипниках скольжения, а червячная пара выполнена из материала, подобного капролону. Передаточное число механизма — 123, работает он практически бесшумно.

Поскольку установить диск с прорезями в этом механизме оказалось очень сложно, пришлось изыскивать иной способ стабилизации частоты вращения. Была сделана попытка использовать узел стабилизатора частоты вращения двигателя от кассетного магнитофона. Однако этот узел хорошо стабилизировал только одно значение этой частоты. При попытке установить иное стабильность нарушалась. После долгого и бесполезного поиска приемлемого решения в литературе пришлось разрабатывать узел стабилизации самостоятельно.
Как известно, напряжение на выводах якоря двигателя постоянного тока складывается из падения напряжения на активном сопротивлении обмоток якоря и противоЭДС, прямо пропорциональной частоте вращения якоря. Эта ЭДС может служить мерилом частоты вращения. Но для этого нужно отделить её от падения напряжения на омическом сопротивлении обмотки.
Описанные в [1, 2] устройства, использующие противо ЭДС для стабилизации или регулирования частоты вращения двигателя либо хорошо поддерживают только одно установленное значение, либо, допуская регулировку частоты в широких пределах, не стабилизируют её при изменении нагрузки. Разработанное устройство отличается сочетанием обоих факторов — сохраняет произвольно установленную частоту вращения при изменении момента нагрузки.
Поставленная задача решается достаточно просто. В разработанном устройстве, схема которого изображена на рис. 2, последовательно с якорем двигателя М1 включён резистор R1, сопротивление которого в точности равно активному сопротивлению якоря. Если из напряжения на якоре вычесть падение напряжения на этом резисторе, получим напряжение, пропорциональное частоте вращения якоря. Операцию вычитания выполняет узел на ОУ DА2.1. Это напряжение поступает на один из входов усилителя сигнала рассогласования на ОУ DА2.2, на другой вход которого подано образцовое напряжение, соответствующее желаемой частоте вращения. ОУ управляет транзистором VT1, регулирующим напряжение питания двигателя М1.

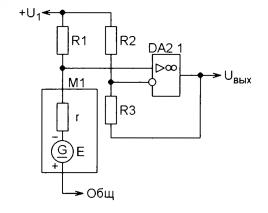
Для лучшего понимания процесса регулирования рассмотрим упрощённую схему устройства, изображённую на рис. 3. Из неё понятно, что активное сопротивление якоря г и резисторы R1—RЗ образуют измерительный мост, в диагональ которого включены входы ОУ DА2.1. Напряжение на выходе моста равно
 При точном выполнении равенства
При точном выполнении равенства мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
мост сбалансирован относительно напряжения питания двигателя U1 благодаря чему напряжение Uвых зависит только от противоЭДС якоря Е, т. е. от частоты его вращения. Изменение питающего напряжения U1 не разбалансирует мост, но вызывет изменение тока через двигатель, что приводит к изменению частоты его вращения и, соответственно, противоЭДС.
Резистор R1 должен быть рассчитан на рассеивание мощности, равной максимальной мощности двигателя.
Необходимую частоту вращения устанавливают подстроенным резистором R5. Увеличение или уменьшение частоты вращения под нагрузкой свидетельствует о неточной балансировке моста. Её нужно добиться подборкой резисторов R1— R3.
Конденсатор С1 и резистор R6 предотвращают высокочастотную генерацию.
Транзистор VT1 и интегральный стабилизатор напряжения 7812 размещены на небольшом теплоотводе. Теоретически устройство нечувствительно к колебаниям напряжения питания, но напряжение на подстроенном резисторе R5, задающем частоту вращения, должно быть стабилизировано. По этой причине в устройстве применён интегральный стабилизатор напряжения DА1. Кроме того, встроенная в этот стабилизатор защита по току предохраняет двигатель и транзистор VТ1 от повреждения при случайном заклинивании механизма.
При испытаниях устройства выяснилось, что основное влияние на стабильность частоты вращения оказывают температурные изменения сопротивления обмотки двигателя, выполненной из медного провода, тогда как резистор R1 изготовлен из манганина. Вводить различного рода термокомпенсирующие цепи было сочтено излишним, так как обеспечить равенство температуры резистора и обмотки двигателя не представляется возможным из-за разных условий отвода от них тепла.
И наконец, испытания готового устройства неожиданно выявили, что частота вращения приборной платформы под нагрузкой падает на 5…10 %. Оказалось, что виновато проскальзывание двух резиновых пассиков, соединяющих вал двигателя с червячным редуктором. Тщательной промывкой шкивов и пассиков, промывкой и смазкой всех подшипников скольжения указанный недостаток был устранён.
В результате достигнут коэффициент стабильности лучше 0,5 % при изменении нагрузки на выходном валу редуктора в пределах от 0 до 20 Н·см, что вполне удовлетворило предъявляемым требованиям.
Несомненное достоинство предложенного решения — его простота по сравнению с устройствами аналогичной точности. Недостаток — почти двукратный перерасход мощности, рассеиваемой на дополнительном резисторе.
ЛИТЕРАТУРА
- Шевченко В. И. и др. Кассетные магнитофоны (библиотека «Телевизионный и радиоприём. Звукотехника», вып. 90). — М.: Связь, 1977.
- Леоненко П. Стабилизатор частоты вращения. — Радио, 1988, № 7, с. 32.
Автор: В. ХИЦЕНКО, Т. ЯКОВЛЕВ, г. Санкт-Петербург
Источник: Радио №4, 2015
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.

Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.

Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Стабилизатор частоты вращения коллекторного двигателя
Стабилизатор частоты вращения коллекторного двигателя
Предлагаемый стабилизатор частоты вращения предназначен для работы с коллекторными двигателями и представляет собой полностью аналоговое устройство. Стабилизатор имеет обратную связь по частоте вращения, в то же время он не требует установки никакого тахогенератора.
Наиболее распространенным типом стабилизаторов частоты вращения ведущего двигателя кассетных магнитофонов является регулятор с положительной обратной связью по току [1]. Регулирование происходит параметрически, поэтому частота довольно сильно меняется при изменении нагрузки на валу двигателя. Для повышения качества работы стабилизатора необходимо ввести обратную связь по частоте вращения. Обычно при этом на вал двигателя устанавливается специальный датчик, чаще всего оптический [2]. Такой датчик включает в себя оптопару, световой поток которой прерывается крыльчаткой (или диском с отверстиями), которая насаживается на вал двигателя. Крыльчатка прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в крыльчатке. Иногда применяется и другой вид датчиков — магнитный. Тогда на вал двигателя устанавливается шестеренка из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с амплитудой около милливильта и частотой, равной частоте вращения двигателя, умноженной на количество зубъев на шестеренке. Однако, при доработке готового ЛПМ часто бывает трудно найти место для установки какого-либо датчика. Но это и не обязательно. Дело в том, что информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор.
Рис. 1. Принципиальная схема стабилизатора частоты вращения.
Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1 (рис. 1). Ток, потребляемый двигателем, создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (рис.2, график 1). Основная гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход усилителя, собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме ограничения. На его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения двигателя (рис. 2, график 2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (рис. 2, график 3). Отрицательный выброс ограничивается диодом VD1. Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с помощью делителя R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (рис. 2, график 4). Постоянная составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте вращения двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное напряжение, пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ U1C. Для получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным эмиттерным повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и достаточно было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с двухтактным эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя или при резких колебаниях нагрузки на валу) [2].
Рис.2. Форма сигналов в контрольных точках.
Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной ситуации дело усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть очень трудно. Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить коэффициент усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора как в установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа контролировать напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без колебательного процесса. Если при работающем двигателе изменить нагрузку на валу, напряжение питания также должно принять новое значение без колебательного процесса. В регуляторе вместо LM324 можно применить практически любые ОУ, например, LM2902, или сдвоенные LM358, LM2904, или даже обычные KP140УД6, УД7. В зависимости от потребляемого двигателем тока может понадобиться установить транзистор VT1 на теплоотвод. Транзистор VT2 теплоотвода не требует.
Литература:
1. З. Гасымов. Стабилизатор частоты вращения электродвигателя. Радио, №12, 1987 г., стр. 48.
2. В. Псурцев. Модернизация ЭПУ G-602. Радиоежегодник, 1987 г., стр. 132 – 140.