Стабилизаторы вращения двигателей ЛПМ
В широко распространенных ныне переносных магнитолах производства стран Юго-Восточной Азии и некоторых стран Европы используются коллекторные двигатели постоянного тока (КДПТ) со встроенными регуляторами частоты вращения (с правым или левым вращением) на напряжение 6, 9 и 12В.
Рис. 1. Регулятор частоты двухскоростного электродвигателя на напряжение 12 В
Надежность этих стабилизаторов, мягко говоря, оставляет желать лучшего, и они довольно часто (особенно при интенсивной эксплуатации) выходят из строя. Стоимость двигателей в сборе довольно существенна. По моему мнению, проще заменить интегральную микросхему стабилизатора. Для упрощения ремонта и возможной модернизации привожу принципиальные схемы наиболее часто встречающихся КДПТ фирм «Matsuschita» и «Mabushi». На рис.1 — регулятор частоты двухскоростного электродвигателя на напряжение 12 В, на рис.2 — односкоростного, на 9 В. Схемы составлены непосредственно по печатным платам стабилизаторов. Включение дополнительных элементов для регулировки скорости вращения в первой схеме показано на рис.3.
Рис. 2. Регулятор частоты односкоростного электродвигателя на напряжение 9 В
Направление вращения вала КДПТ определяется по обозначению в правом нижнем углу заводской таблички: двигатель левого вращения обозначается CCW («contra clock way» — «против часовой стрелки»), правого вращения — CW («clock way» — «по часовой стрелке»). Описанные здесь стабилизаторы можно использовать и в отечественных кассетных магнитофонах и магнитолах взамен устаревших регуляторов РЧВ-1-02 и РС-1-09. К сожалению, примененные в них интегральные микросхемы не имеют отечественных аналогов.
Рис. 3. Включение дополнительных элементов для регулировки скорости вращения
Стабилизаторы вращения двигателей ЛПМ
В широко распространенных ныне переносных магнитолах производства стран Юго-Восточной Азии и некоторых стран Европы используются коллекторные двигатели постоянного тока (КДПТ) со встроенными регуляторами частоты вращения (с правым или левым вращением) на напряжение 6, 9 и 12В.
Рис. 1. Регулятор частоты двухскоростного электродвигателя на напряжение 12 В
Надежность этих стабилизаторов, мягко говоря, оставляет желать лучшего, и они довольно часто (особенно при интенсивной эксплуатации) выходят из строя. Стоимость двигателей в сборе довольно существенна. По моему мнению, проще заменить интегральную микросхему стабилизатора. Для упрощения ремонта и возможной модернизации привожу принципиальные схемы наиболее часто встречающихся КДПТ фирм «Matsuschita» и «Mabushi». На рис.1 — регулятор частоты двухскоростного электродвигателя на напряжение 12 В, на рис.2 — односкоростного, на 9 В. Схемы составлены непосредственно по печатным платам стабилизаторов. Включение дополнительных элементов для регулировки скорости вращения в первой схеме показано на рис.3.
Рис. 2. Регулятор частоты односкоростного электродвигателя на напряжение 9 В
Направление вращения вала КДПТ определяется по обозначению в правом нижнем углу заводской таблички: двигатель левого вращения обозначается CCW («contra clock way» — «против часовой стрелки»), правого вращения — CW («clock way» — «по часовой стрелке»).Описанные здесь стабилизаторы можно использовать и в отечественных кассетных магнитофонах и магнитолах взамен устаревших регуляторов РЧВ-1-02 и РС-1-09. К сожалению, примененные в них интегральные микросхемы не имеют отечественных аналогов.
Рис. 3. Включение дополнительных элементов для регулировки скорости вращения
Автор: В.ХАРЬКОВСКИЙ, г. Лиски, Воронежской обл.
Мнения читателей
А какие данные дросселя L1.
mirkomilmm@mail.ru / 20.07.2007 — 10:42
нужна схема от регулятор скорости трёхфазного двигателя — желателно мошныйспасибо за совет
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Стабилизатор оборотов коллекторного двигателя 12В
Схема стабилизатора оборотов (как и другие аналогичные) основана на получении сигнала, пропорционального частоте вращения
Основных отличий два:
— для выделения напряжения пропорционального частоте вращения якоря используется мостовая схема, которая позволяет выделять напряжение противо-ЭДС ротора, пропорциональное скорости вращения
Далее полученное напряжение Uoc можно использовать для обратной связи по сути любого источника питания.
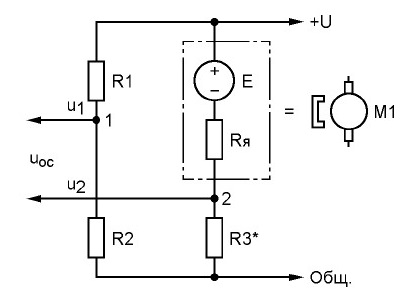
В описываемой схеме мост выглядит следующим образом
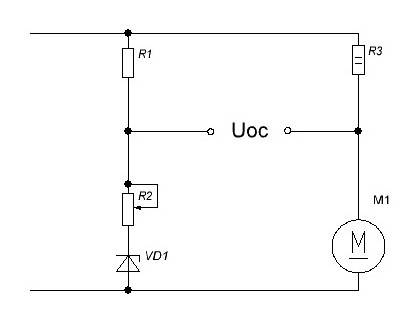
При соблюдении пропорции R1/R2 = R3/Rя (Rя — сопротивление якоря) и при Uос = 0 — мы получим компенсацию Rя и соответственно Е противо-ЭДС ротора будет равно напряжению стабилизации VD1
Если VD1 сделать регулируемым, то, по сути, меняя напряжение его стабилизации, мы меняем напряжение непосредственно на роторе двигателя (скомпенсировав влияние Rя) и обеспечиваем стабильность скорости вращения.
В данном случае за основу была взята TNY268P в стандартной схеме включения (по даташиту)
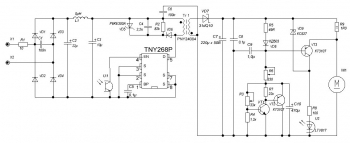
Левая от трансформатора часть схемы — стандартная обвязка TNY268 (может быть по сути использована за основу любая конструкция ИБП с максимально широким диапазоном выходного напряжения (этот диапазон определяет диапазон изменения скорости ротора) и требуемой мощностью.
В правой части схемы собственно мост образуют резисторы R5, R6 и R9 (аналогично R1, R2 и R3 на схеме на среднем рисунке).
VT1, VT2 и обвязка из резисторов R3, R4, R7 образуют аналог стабилитрона с регулируемым напряжением стабилизации (можно заменить на TL431).
Собственно Uос появляется между базой и эмиттером VT3, который управляет током светодиода в оптопаре U2, создавая обратную связь.
VD8 введен как компенсатор напряжения база-эмиттер VT3. Емкости C9 и C10 придаю стабильность узлу обратной связи.
Стабилитрон VD9 ограничивает максимальное напряжение на выходе источника питания и, при наличии встроенной защиты от перенапряжения, не нужен.
При подготовке схемы под конкретную модель электродвигателя возможно номинал R5 будет другим (для соблюдения пропорции R5/(0,7*R6) = R9/Rя. Падение напряжения на R9 при номинальном потребляемом токе должно быть около 1В, больше нежелательно — будет сильно греться.
При настройке подстроечным резистором R6 выбираем нужную степень обратной связи, притормаживая двигатель рукой и делая им обороты, наиболее близкие к оборотам без нагрузки, но в то же время не допуская «подергиванием» якоря без нагрузи.
Схема показала хорошую повторяемость, работает как для польской электродрели / шлифовалки 12В Pegasus (вот такой) и работала с другим моторчиком на 24В.
Обороты регулируются от 500 до 12000 об/мин с очень хорошей стабильностью (рукой трудно удержать). Элементы греются незначительно — в основном R9.
Подборка схем регулятора оборотов двигателя постоянного тока
Производить регулировку скорости вращения вала коллекторного электродвигателя, имеющего малую мощность, можно подсоединяя последовательно в электроцепь его питания резистор. Но данный вариант создает очень низкий КПД, и к тому же отсутствует возможность осуществлять плавное изменение скорости вращения.

Основное, что этот способ временами приводит к полной остановке электродвигателя при низком напряжении питания. Регулятор оборотов электродвигателя постоянного тока, описанные в данной статье, не имеют эти недостатки. Данные схемы можно с успехом применять и для изменения яркости свечения ламп накаливания на 12 вольт.
Описание 4 схем регуляторов оборотов электродвигателя
Первая схема
На транзисторе VT1 (однопереходном) реализован генератор пилообразного напряжения (частота 150 Гц). Операционный усилитель DA1 играет роль компаратора, создающего ШИМ на базе транзистора VT2. В результате получается ШИМ регулятор оборотов двигателя.

Изменяют скорость вращения переменным резистором R5, который меняет длительность импульсов. Так как, амплитуда ШИМ импульсов постоянна и равна напряжению питания электродвигателя, то он никогда не останавливается даже при очень малой скорости вращения.
Вторая схема
Она схожа с предыдущей, но в роли задающего генератора применен операционный усилитель DA1 (К140УД7).

Этот ОУ функционирует как генератор напряжения вырабатывающий импульсы треугольной формы и имеющий частоту 500 Гц. Переменным резистором R7 выставляют частоту вращения электродвигателя.
Третья схема
Она своеобразная, построена на она на популярном таймере NE555. Задающий генератор действует с частотой 500 Гц. Ширина импульсов, а следовательно, и частоту вращения двигателя возможно изменять от 2 % до 98 %.

Слабым местом во всех вышеприведенных схемах является, то что в них нет элемента стабилизации частоты вращения при увеличении или уменьшении нагрузки на валу двигателя постоянного тока. Разрешить эту проблему можно с помощью следующей схемы:

Как и большинство похожих регуляторов, схема этого регулятора имеет задающий генератор напряжения, вырабатывающий импульсы треугольной формы, частота которых 2 кГц. Вся специфика схемы — присутствие положительной обратной связи (ПОС) сквозь элементы R12,R11,VD1,C2, DA1.4, стабилизирующей частоту вращения вала электродвигателя при увеличении или уменьшении нагрузки.
При налаживании схемы с определенным двигателем, сопротивлением R12 выбирают такую глубину ПОС, при которой еще не случаются автоколебания частоты вращения при изменении нагрузки.
Детали регуляторов вращения электродвигателей
В данных схемах возможно применить следующие замены радиодеталей: транзистор КТ817Б — КТ815, КТ805; КТ117А возможно поменять КТ117Б-Г или 2N2646; Операционный усилитель К140УД7 на К140УД6, КР544УД1, ТL071, TL081; таймер NE555 — С555, КР1006ВИ1; микросхему TL074 — TL064, TL084, LM324.
При использовании более мощной нагрузки, ключевой транзистор КТ817 возможно поменять мощным полевым транзистором, например, IRF3905 или ему подобный.
Стабилизатор частоты вращения коллекторного двигателя
Стабилизатор частоты вращения коллекторного двигателя
Предлагаемый стабилизатор частоты вращения предназначен для работы с коллекторными двигателями и представляет собой полностью аналоговое устройство. Стабилизатор имеет обратную связь по частоте вращения, в то же время он не требует установки никакого тахогенератора.
Наиболее распространенным типом стабилизаторов частоты вращения ведущего двигателя кассетных магнитофонов является регулятор с положительной обратной связью по току [1]. Регулирование происходит параметрически, поэтому частота довольно сильно меняется при изменении нагрузки на валу двигателя. Для повышения качества работы стабилизатора необходимо ввести обратную связь по частоте вращения. Обычно при этом на вал двигателя устанавливается специальный датчик, чаще всего оптический [2]. Такой датчик включает в себя оптопару, световой поток которой прерывается крыльчаткой (или диском с отверстиями), которая насаживается на вал двигателя. Крыльчатка прерывает световой поток, и на выходе оптопары формируются импульсы с частотой вращения двигателя, умноженной на количество прорезей в крыльчатке. Иногда применяется и другой вид датчиков — магнитный. Тогда на вал двигателя устанавливается шестеренка из ферромагнитного материала, рядом с которой крепится магнитная головка. При вращении шестеренки на выводах головки появляется переменное напряжение с амплитудой около милливильта и частотой, равной частоте вращения двигателя, умноженной на количество зубъев на шестеренке. Однако, при доработке готового ЛПМ часто бывает трудно найти место для установки какого-либо датчика. Но это и не обязательно. Дело в том, что информацию о частоте вращения коллекторного двигателя можно извлечь из потребляемого им тока. Этот ток содержит переменную составляющую, первая гармоника которой имеет частоту, равную частоте вращения двигателя, умноженную на число пластин коллектора. Двигатели, которые чаще всего применяются в магнитофонах, имеют три пластины коллектора. Поэтому эта частота равна утроенной частоте вращения двигателя. Именно на этом принципе и построен описываемый регулятор.
Рис. 1. Принципиальная схема стабилизатора частоты вращения.
Для получения сигнала обратной связи в цепь питания двигателя включен датчик тока R1 (рис. 1). Ток, потребляемый двигателем, создает на этом резисторе падение, которое имеет переменную составляющую около 100 мВ peak-to-peak (рис.2, график 1). Основная гармоника выделяется с помощью простейшего ФНЧ R2C1 и через разделительный конденсатор C2 поступает на вход усилителя, собранного на ОУ U1A. Коэффициент усиления задан резисторами R4R5 так, чтобы усилитель работал в режиме ограничения. На его выходе формируетя практически прямоугольный сигнал с частотой, равной утроенной частоте вращения двигателя (рис. 2, график 2). Этот сигнал дифференцируется с помощью цепочки C3R6R7R8 (рис. 2, график 3). Отрицательный выброс ограничивается диодом VD1. Далее сигнал поступает на компаратор, в роли которого использован ОУ U1B. Опорное напряжение задается с помощью делителя R9R10. На выходе компаратора формируются прямоугольные импульсы постоянной длительности (рис. 2, график 4). Постоянная составляющая такой импульсной последовательности пропорциональна частоте следования импульсов, т.е. частоте вращения двигателя. Импульсная последовательность интегрируется с помощью цепочек R11R12C5 и R13C6. Постоянное напряжение, пропорциональное частоте вращения, поступает на пропорционально-интегрирующий регулятор, собранный на ОУ U1C. Для получения образцового напряжения применен регулируемый стабилитрон U2. Нужную частоту вращения устанавливают регулировкой этого напряжения с помощью переменного резистора R19. Выход ОУ U1C умощнен комплементарным эмиттерным повторителем на транзисторах VT1VT2. Казалось бы, направление тока питания двигателя всегда одно и то же и достаточно было бы одиночного эмитерного повторителя, который обеспечивал бы вытекающий ток. Но на самом деле с двухтактным эмиттерным повторителем гораздо лучше поведение системы во время переходных процессов (при пуске двигателя или при резких колебаниях нагрузки на валу) [2].
Рис.2. Форма сигналов в контрольных точках.
Нужно отдельно остановиться на проблеме устойчивости системы автоматического регулирования. В данной ситуации дело усложняется тем, что на устойчивость влияют и механические параметры системы, которые количественно учесть очень трудно. Поэтому в некоторых случаях придется подобрать АЧХ регулятора с помощью элементов R16C7 или даже ограничить коэффициент усиления, включив параллельно этой цепочке резистор. Подбор нужно вести по критерию устойчивости регулятора как в установившемся режиме, так и во время переходных процессов. Для этого нужно с помощью осциллографа контролировать напряжение питания двигателя. При включении оно должно плавно достичь номинального значения, причем без колебательного процесса. Если при работающем двигателе изменить нагрузку на валу, напряжение питания также должно принять новое значение без колебательного процесса. В регуляторе вместо LM324 можно применить практически любые ОУ, например, LM2902, или сдвоенные LM358, LM2904, или даже обычные KP140УД6, УД7. В зависимости от потребляемого двигателем тока может понадобиться установить транзистор VT1 на теплоотвод. Транзистор VT2 теплоотвода не требует.
Литература:
1. З. Гасымов. Стабилизатор частоты вращения электродвигателя. Радио, №12, 1987 г., стр. 48.
2. В. Псурцев. Модернизация ЭПУ G-602. Радиоежегодник, 1987 г., стр. 132 – 140.