Регулятор оборотов двигателя постоянного тока 12 вольт

На простых механизмах удобно устанавливать аналоговые регуляторы тока. К примеру, они могут изменить скорость вращения вала мотора. С технической стороны выполнить такой регулятор просто (потребуется установка одного транзистора). Применим для регулировки независимой скорости моторов в робототехнике и источниках питания. Наиболее распространены два варианта регуляторов: одноканальные и двухканальные.
Видео №1 . Одноканальный регулятор в работе. Меняет скорость кручения вала мотора посредством вращения ручки переменного резистора.
Видео №2. Увеличение скорости кручения вала мотора при работе одноканального регулятора. Рост числа оборотов от минимального до максимального значения при вращении ручки переменного резистора.
Видео №3 . Двухканальный регулятор в работе. Независимая установка скорости кручения валов моторов на базе подстроечных резисторов.
Видео №4. Напряжение на выходе регулятора измерено цифровым мультиметром. Полученное значение равно напряжению батарейки, от которого отняли 0,6 вольт (разница возникает из-за падения напряжения на переходе транзистора). При использовании батарейки в 9,55 вольт, фиксируется изменение от 0 до 8,9 вольт.
Функции и основные характеристики
Ток нагрузки одноканального (фото. 1) и двухканального (фото. 2) регуляторов не превышает 1,5 А. Поэтому для повышения нагрузочной способности производят замену транзистора КТ815А на КТ972А. Нумерация выводов для этих транзисторов совпадает (э-к-б). Но модель КТ972А работоспособна с токами до 4А.


Одноканальный регулятор для мотора
Устройство управляет одним мотором, питание осуществляется от напряжения в диапазоне от 2 до 12 вольт.
Конструкция устройства
Основные элементы конструкции регулятора представлены на фото. 3. Устройство состоит из пяти компонентов: два резистор переменного сопротивления с сопротивлением 10 кОм (№1) и 1 кОм (№2), транзистор модели КТ815А (№3), пара двухсекционных винтовых клеммника на выход для подключения мотора (№4) и вход для подключения батарейки (№5).

Примечание 1. Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Порядок работы регулятора мотора описывает электросхема (рис. 1). С учетом полярности на разъем ХТ1 подают постоянное напряжение. Лампочку или мотор подключают к разъему ХТ2. На входе включают переменный резистор R1, вращение его ручки изменяет потенциал на среднем выходе в противовес минусу батарейки. Через токоограничитель R2 произведено подключение среднего выхода к базовому выводу транзистора VT1. При этом транзистор включен по схеме регулярного тока. Положительный потенциал на базовом выходе увеличивается при перемещении вверх среднего вывода от плавного вращения ручки переменного резистора. Происходит увеличение тока, которое обусловлено снижением сопротивления перехода коллектор-эмитттер в транзисторе VT1. Потенциал будет уменьшаться, если ситуация будет обратной.
 Принципиальная электрическая схема
Принципиальная электрическая схема
Материалы и детали
Необходима печатная плата размером 20х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита (допустимая толщина 1-1,5 мм). В таблице 1 приведен список радиокомпонентов.

Примечание 2. Необходимый для устройства переменный резистор может быть любого производства, важно соблюсти для него значения сопротивления тока указанные в таблице 1.
Примечание 3. Для регулировки токов выше 1,5А транзистор КТ815Г заменяют на более мощный КТ972А (с максимальным током 4А). При этом рисунок печатной платы менять не требуется, так как распределение выводов у обоих транзисторов идентично.
Процесс сборки
Для дальнейшей работы нужно скачать архивный файл, размещенный в конце статьи, разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора (файл termo1), а монтажный чертеж (файл montag1) – на белом листе офисной (формат А4).
Далее чертеж монтажной платы (№1 на фото. 4) наклеивают к токоведущим дорожкам на противоположной стороне печатной платы (№2 на фото. 4). Необходимо сделать отверстия (№3 на фото. 14) на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпадать. На фото.5 показана цоколёвка транзистора КТ815.


Вход и выход клеммников-разъемов маркируют белым цветом . Через клипсу к клеммнику подключается источник напряжения. Полностью собранный одноканальный регулятор отображен на фото. Источник питания (батарея 9 вольт) подключается на финальном этапе сборки. Теперь можно регулировать скорость вращения вала с помощью мотора, для этого нужно плавно вращать ручку регулировки переменного резистора.


Для тестирования устройства необходимо из архива распечатать чертеж диска. Далее нужно наклеить этот чертеж (№1) на плотную и тонкую картонную бумагу (№2 ). Затем с помощью ножниц вырезается диск (№3).

Полученную заготовку переворачивают (№1 ) и к центру крепят квадрат черной изоленты (№2) для лучшего сцепления поверхности вала мотора с диском. Нужно сделать отверстие (№3) как указано на изображении. Затем диск устанавливают на вал мотора и можно приступать к испытаниям. Одноканальный регулятор мотора готов!
Двухканальный регулятор для мотора
Используется для независимого управления парой моторов одновременно. Питание осуществляется от напряжения в диапазоне от 2 до 12 вольт. Ток нагрузки рассчитан до 1,5А на каждый канал.
Конструкция устройства
Основные компоненты конструкции представлены на фото.10 и включают: два подстроечных резистора для регулировки 2-го канала (№1) и 1-го канала (№2), три двухсекционных винтовых клеммника для выхода на 2-ой мотор (№3), для выхода на 1-ый мотор (№4) и для входа (№5).

Примечание.1 Установка винтовых клеммников не обязательна. С помощью тонкого монтажного многожильного провода можно подключить мотор и источник питания напрямую.
Принцип работы
Схема двухканального регулятора идентична электрической схеме одноканального регулятора. Состоит из двух частей (рис.2). Основное отличие: резистор переменного сопротивления замен на подстроечный резистор. Скорость вращения валов устанавливается заранее.

Примечание.2. Для оперативной регулировки скорости кручения моторов подстроечные резисторы заменяют с помощью монтажного провода с резисторами переменного сопротивления с показателями сопротивлений, указанными на схеме.
Материалы и детали
Понадобится печатная плата размером 30х30 мм, изготовленная из фольгированного с одной стороны листа стеклотекстолита толщиной 1-1,5 мм. В таблице 2 приведен список радиокомпонентов.

Процесс сборки
После скачивания архивного файла, размещенного в конце статьи, нужно разархивировать его и распечатать. На глянцевой бумаге печатают чертеж регулятора для термоперевода (файл termo2), а монтажный чертеж (файл montag2) – на белом листе офисной (формат А4).
Чертеж монтажной платы наклеивают к токоведущим дорожкам на противоположной стороне печатной платы . Формируют отверстия на монтажом чертеже в посадочных местах. Монтажный чертеж крепится к печатной плате сухим клеем, при этом отверстия должны совпасть. Производится цоколёвка транзистора КТ815. Для проверки нужно временно соединить монтажным проводом входы 1 и 2 .


Любой из входов подключают к полюсу источника питания (в примере показана батарейка 9 вольт). Минус источника питания при этом крепят к центру клеммника. Важно помнить: черный провод «-», а красный «+».
Моторы должны быть подключены к двум клеммникам, также необходимо установить нужную скорость. После успешных испытаний нужно удалить временное соединение входов и установить устройство на модель робота. Двухканальный регулятор мотора готов!
В АРХИВЕ представленные необходимые схемы и чертежи для работы. Эмиттеры транзисторов помечены красными стрелками.
ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Урок 73. ПИД-регулятор скорости вращения двигателя постоянного тока. Разработка аппаратной части.
Первый из серии уроков, посвященных разработке регулятора скорости вращения коллекторного двигателя постоянного тока. Рассматривается аппаратное подключение двигателя к плате Ардуино.
Игорь из Москвы заказал мне разработку контроллера- регулятора скорости вращения двигателя постоянного тока.
Это продолжение бесконечной разработки интеллектуального сверлильного станка. Сначала я написал для него общую управляющую программу. Затем мы создали электронный прицел для станка на OSD-генераторе. Пришла очередь до двигателя, который вращает шпиндель.
Используется коллекторный двигатель постоянного тока мощностью 500 Вт и номинальным напряжением 100 В. Необходимо задавать и стабилизировать его скорость вращения.
Тема показалась мне очень интересной, и я решил в качестве уроков описать последовательность своих действий по разработке контроллера двигателя. Тем более в интернете эта тема ограничивается теоретическими рассуждениями.
Должен получиться учебный материал на несколько разных тем:
- аппаратное подключение двигателя постоянного тока к Ардуино;
- измерение частоты и периода сигнала ;
- управление нагрузкой с помощью ШИМ;
- ПИД-регулятор;
- этапы разработки подобных устройств.
Кроме того, я надеюсь, что получится законченный аппаратно-программный блок – ПИД-регулятор скорости вращения двигателя постоянного тока. Его можно будет использовать в различных приложениях.
У Игоря используется достаточно мощный мотор 500 Вт, с номинальным напряжением питания 100 В. У меня такого двигателя нет. Поэтому я проведу разработку и испытания на компьютерном вентиляторе с номинальным напряжением 12 В. Не сомневаюсь, что все написанное и разработанное будет справедливо и для гораздо более мощных устройств. По крайней мере, Игорь проверит контроллер на 500 ваттном моторе.
Аппаратное подключение двигателя постоянного тока к Ардуино.
Существуют две основные задачи:
- Необходимо управлять двигателем, изменяя на нем напряжение, а значит и мощность. Т.е. нужно создать регулирующий элемент, с помощью которого регулятор будет изменять состояние двигателя, увеличивать или уменьшать его скорость вращения.
- Надо измерять скорость вращения двигателя, чтобы регулятор мог ее контролировать.
Сошлюсь на Урок 39, раздел ”Общие сведения о регуляторах”. Там написано, что необходимо выделить:
- регулируемый параметр – что мы регулируем;
- регулирующий элемент – с помощью чего мы регулируем.
Аппаратную часть этих компонентов регулятора и будем разрабатывать в этом уроке.
Подключение двигателя к ШИМ Arduino.
Естественно для управления двигателем будем использовать ШИМ. Это значительно упростит схему, повысит КПД. Практически, независимо от мощности и напряжения мотора, для управления им достаточно одного ключа. Конечно, передельно-допустимые параметры ключа должны соответствовать двигателю. Для моего двигателя-вентилятора я выбрал такие элементы.
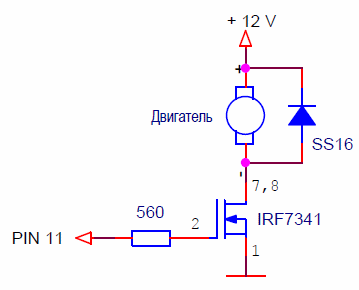
ШИМ с выхода Ардуино открывает и закрывает ключ, собранный на MOSFET-транзисторе. Можно, конечно, использовать и биполярный транзистор, но:
- полевым проще управлять;
- у него меньше падение напряжения в открытом состоянии, а значит он меньше греется;
- в отличие от биполярного транзистора, он работает на высоких частотах 100 кГц и выше.
Я выбрал MOSFET-транзистор IRF7341: N-канал, 55 В, 4 А. Кроме предельно-допустимых параметров необходимо учитывать то, что транзистор должен быть низкопороговым, т.е. открываться при небольшом напряжении (не более 5 В). Иначе необходимо использовать дополнительный элемент – драйвер.
Диод в схеме абсолютно необходим. Двигатель – это индуктивная нагрузка, а иногда и электрогенератор. Поэтому при закрытии транзистора на выводах двигателя могут возникать броски высокого напряжения. Они должны замыкаться через диод, чтобы не сжечь транзистор.
В некоторых подобных схемах используют низкочастотные выпрямительные диоды, например, 1N4007. Это допустимо только для дискретного управления двигателем: включить или выключить. При управлении с помощью ШИМ, особенно с высокой частотой, диод должен быть высокочастотным, лучше с барьером Шоттки.
При закрытом транзисторе диод находится в открытом состоянии, через него течет ток размагничивания обмотки двигателя. Затем транзистор открывается. А диод закрывается только через время восстановления обратного сопротивления. Даже у “быстрых” (FR307) диодов это время составляет 150-500 нс, у “супербыстрых” 35 нс, а у выпрямительных 1N4007 этот параметр не нормируется. Представьте себе, что при частоте ШИМ 100 кГц 100000 раз в секунду будет происходить короткое замыкание. Это приведет к жутким помехам, уменьшению КПД и нагреву диода и транзистора.
При высоком напряжении все значительно усугубиться. В общем рекомендации по выбору диода:
- Лучше всего диод Шоттки.
- Если высокое напряжение (более 150 В) не позволяет использовать диод Шоттки, то лучшим вариантом будет карбидокремиевые диоды Шоттки.
- Следующим приемлемым вариантом могут быть HEXFRED-диоды с ограничением обратного тока обратного восстановления;
- На крайний случай остаются супербыстрые и ультрабыстрые диоды.
У меня напряжение всего 12 В. Я выбрал диод Шоттки SS16.
Наверное, понятно, что меняя коэффициент заполнения ШИМ, мы будем изменять среднее напряжения на двигателе, я значит, и его мощность. Частоту ШИМ определим экспериментально.
Измерение скорости вращения.
Традиционным компонентом для измерения числа оборотов мотора служит датчик Холла. Это датчик, который показывает наличие магнитного поля, например, присутствие рядом с ним постоянного магнита. Для наших целей необходимы цифровые или дискретные датчики Холла. В отличие от аналоговых они срабатывают при превышении магнитным полем определенного порога и имеют гистерезис.
Конструкции измерителей скорости могут быть самыми разными. Можно закрепить на валу двигателя металлический диск с радиальными прорезями и использовать автомобильный датчик Холла.

Диск будет прерывать магнитное поле между датчиком Холла и постоянным магнитом. На прорезях магнитное поле будет проходить к датчику и таким образом, при вращении, будут формироваться импульсы.
Я поступил проще. Использовал дешевый, миниатюрный датчик Холла TLE4905L. В самых дорогих магазинах он стоит до 50 руб, а на АлиЭкспресс от 25 руб.
Это цифровой датчик Холла, настроенный на определенный порог магнитного поля. Он прекрасно срабатывает на расстоянии 8 мм от миниатюрного магнита диаметром 5 мм и толщиной 1 мм.
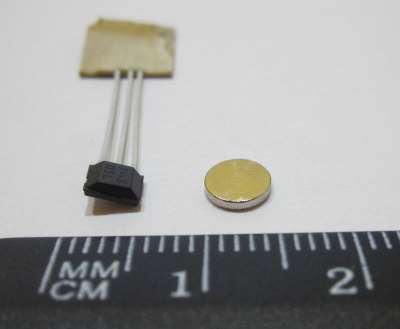
Конструкция измерителя очевидна. Я приклеил 2 магнита к диску вентилятора и над линией, по которой они двигаются при вращении, расположил датчик Холла.

Когда магниты проходят под датчиком, на его выходе формируются импульсы. Измерив частоту этих импульсов можно определить скорость вращения двигателя. На один оборот вырабатываются 2 импульса. Я использовал 2 магнита для того чтобы не нарушить балансировку вентилятора. Возможно, хватило бы и одного.
Как у датчика, так и у магнитов есть полярности. Поэтому перед тем, как устанавливать эти компоненты надо проверить в каком положении срабатывает датчик.
Датчик TLE4905L имеет выход с открытым коллектором. Он не формирует напряжение на выходе, а только замыкает или размыкает выход на землю. Со стороны приемника необходим внешний подтягивающий резистор.
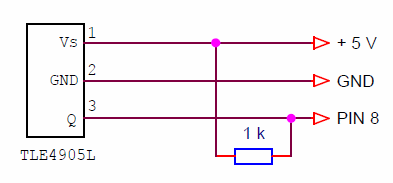
Подключение датчика необходимо производить отдельными проводами. Все связи должны соединяться непосредственно на плате Ардуино. С точки зрения помехозащищенности это самое узкое место в системе.
Для задания скорости будем использовать переменный резистор. Подключим его к аналоговому входу платы Ардуино. Добавим еще сигнал включения/выключения двигателя и выход для тестовых импульсов. С помощью него будем проверять работу устройства без мотора.
С учетом всего вышесказанного окончательная схема контроллера-регулятора оборотов двигателя будет выглядеть так.
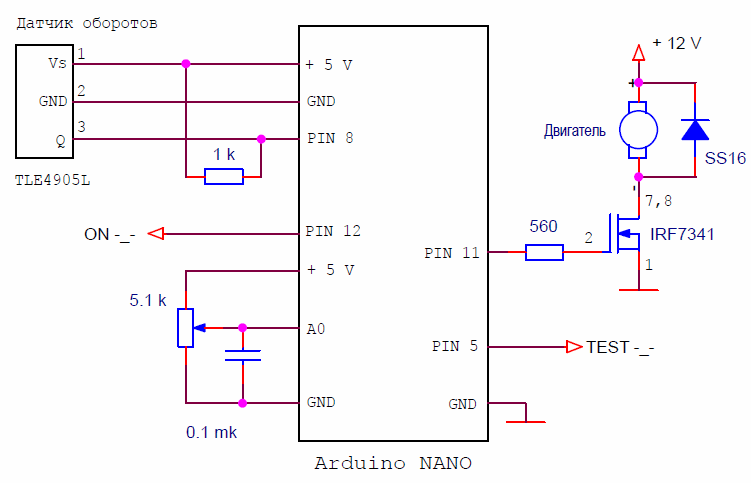
В реальных приложениях обороты можно задавать напряжением на аналоговом входе A0. Получится стандартный аналоговый интерфейс 0…5 В. Если необходим диапазон 0…10 В, то достаточно добавить резисторный делитель напряжения.
Состояние контроллера для отладки ПИД-регулятора будем передавать на компьютер через последовательный порт. Я разработаю программу верхнего уровня с регистрацией данных и отображением их в графическом виде. Регистратор значительно облегчает настройку любого ПИД-регулятора.
В следующем уроке начнем “оживлять” контроллер.