Схема замещения асинхронного двигателя
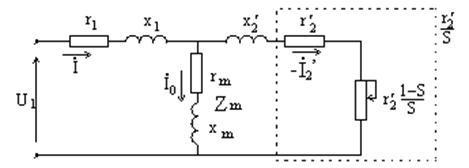
При практических расчетах вместо реального асинхронного двигателя, на схеме его заменяют эквивалентной схемой замещения, в которой электромагнитная связь заменена на электрическую. При этом параметры цепи ротора приводятся к параметрам цепи статора.
По сути, схема замещения асинхронного двигателя аналогична схеме замещения трансформатора. Различие в том, что у асинхронного двигателя электрическая энергия преобразуется в механическую энергию (а не в электрическую, как это происходит в трансформаторе), поэтому на схеме замещения добавляют переменное активное сопротивление r2 ‘ (1-s)/s, которое зависит от скольжения. В трансформаторе, аналогом этого сопротивления является сопротивление нагрузки Z н .
Величина скольжения определяет переменное сопротивление, например, при отсутствии нагрузки на валу, скольжение практически равно нулю s≈0, а значит переменное сопротивление равно бесконечности, что соответствует режиму холостого хода. И наоборот, при перегрузке двигателя, s=1, а значит сопротивление равно нулю, что соответствует режиму короткого замыкания.
Как и у трансформатора, у асинхронного двигателя есть Т-образная схема замещения.

Более удобной при практических расчетах является Г-образная схема замещения.

В Г-образной схеме, намагничивающая ветвь вынесена к входным зажимам. Таким образом, вместо трех ветвей получают две ветви, первая – намагничивающая, а вторая – рабочая. Но данное действие требует внесение дополнительного коэффициента c1, который представляет собой отношение напряжения подводимого к двигателю, к ЭДС статора.

Величина c1 приблизительно равна 1, поэтому для максимального упрощения, на практике принимают значение c1≈1. При этом следует учитывать, что значение коэффициента c1 уменьшается с увеличением мощности двигателя, поэтому более точное приближение будет соответствовать более мощному двигателю.
Параметры схемы замещения рассматриваются подробнее в статье векторная диаграмма асинхронного двигателя
Схемы замещения асинхронной машины




![]()
![]()
Для исследования работы асинхронной машины часто используются схемы замещения, которые должны отвечать основным уравнениям ЭДС и токов реальной машины.
Реально обмотки статора и ротора связаны электромагнитно. Схемы, где электромагнитная связь обмоток заменяется электрической, называются схемами замещения асинхронной машины. В теории асинхронных машин используются две схемы замещения: а) Т-образная; б) Г-образная.
Т-образная схема замещения.
В этой схеме замещения сопротивления  в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
в разных цепях. Из опыта короткого замыкания обычно определяют их сумму т.е.
Поэтому в теории асинхронных машин чаще пользуются Г-образной схемой замещения. При переходе к Г-образной схеме замещения:
1) ток I1 должен оставаться неизменным, т.е. I1 = const.
2) При скольжении S = 0 ток  , т.е. ток
, т.е. ток  должен проходить по тем же сопротивлениям Z1 и Zm.
должен проходить по тем же сопротивлениям Z1 и Zm.
3) Кроме того параметры первичной обмотки и вторичной обмотки соответственно должны измениться на коэффициент С1 и  .
.
Г-образная схема замещения

В Г-образной схеме рабочая ветвь и цепь намагничивания независимы, а сопротивления активные и индуктивные можно просуммировать.
В Г-образной схеме замещения
 ,
,
где  — комплексное число
— комплексное число
Ток I1, не должен изменяться, тогда исходя из Т-образной схемы

а, в Г-образной схеме ток
после преобразования получим
 ,
,
поэтому параметры статорной обмотки должны умножить на коэффициент С1, а параметры роторной обмотки на (см. Г-образную схему). Покажем связь между током в роторе  (Т-образной схемы замещения) с током
(Т-образной схемы замещения) с током  (Г-образной схемы замещения).
(Г-образной схемы замещения).
Из Т-образной схемы ток
 ,
,
если подставить выражение тока  и преобразуем это выражение, тогда получим
и преобразуем это выражение, тогда получим
 ,
,
тогда отношение токов

равно комплексному коэффициенту С1.
т.е. С1 представляет собою отношение напряжения приложенного к двигателю  к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
к напряжению на намагничивающем контуре при токе идеального холостого хода (S = 0).
билеты_ЭМ / 37.Схемы замещения асинхронной машины
37) Схемы замещения асинхронной машины.
Схема замещения позволяет определить токи, потери мощности и падения напряжения в асинхронной машине. При этом нужно учитывать, что в обмотке вращающегося ротора проходит ток, действующее значение и частота которого зависят от частоты вращения.
Схема замещения обмотки ротора. Из электрической схемы замещения ротора при его вращении (рис. 5.14, а) следует, что ток ротора

При вращении ротора [см. (5.13а) и (5.12а)] ЭДС E2s в обмотке ротора и ее частота пропорциональны скольжению s. Следовательно, и индуктивное сопротивление обмотки ротора зависит от скольжения:

где Х2—индуктивное сопротивление обмотки заторможенного ротора.

В числителе и знаменателе (5.32) есть переменная величина s, поэтому преобразуем его к виду

Уравнению (5.32а) соответствует электрическая схема замещения, показанная на рис. 5.14, б. Здесь ЭДС Е2 и индуктивное сопротивление Х2 неизменны, а активное сопротивление R2/s изменяется в зависимости от скольжения.
Схемы, представленные на рис. 5.14, а, б, с энергетической точки зрения не эквивалентны. Так, в схеме, приведенной на рис. 5.14, а, электрическая мощность ротора Рр равна электрическим потерям
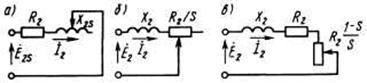
Рис. 5.14. Схемы замещения ротора асинхронной машины

а мощность, потребляемая в схеме, приведённой на рис. 5.14, б,

Отношение этих мощностей

Однако поскольку s = ΔPэл2/Pэм, получим, что Р’р = Рэм. Следовательно, электрическая мощность Р’р в схеме, представленной на рис. 5.14, б, равна всей электромагнитной мощности, подводимой от статора к ротору.
По известным значениям ΔРэл2 и Рэм можно определить и механическую мощность ротора:

Полученный результат наглядно представлен электрической схемой (рис. 5.14, в), в которой активное сопротивление обмотки ротора состоит из двух частей: R2 и R2(1—s)/s. Первое сопротивление не зависит от режима работы, и потери в нем равны электрическим потерям реального ротора. Второе сопротивление зависит от скольжения, и мощность, выделяющаяся в нем, численно равна механической мощности двигателя. Таким образом, рассматриваемая схема замещения позволяет заменить реальный вращающийся ротор неподвижным, в цепь обмотки которого включено активное сопротивление, зависящее от частоты вращения ротора.
Т-образная схема замещения. Полная схема замещения асинхронной машины при вращающемся роторе отличается от схемы замещения асинхронной машины с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 5.15, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора. Векторная диаграмма для Т-образной схемы замещения приведена на рис. 5.15, б.
Сопротивления Rm и Хт намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Г-образная схема замещения. Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рис. 5.16, а. Подобные преобразования изучаются в курсе ТОЭ, поэтому математические выкладки здесь не приводятся.
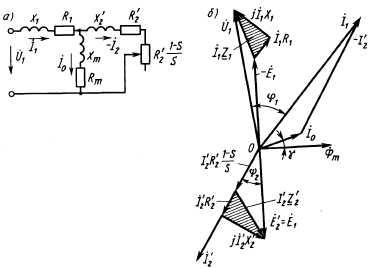
Рис. 5.15. Т-образная схема замещения (а) асинхронной машины
и ее векторная диаграмма (б)
Для Г-образной схемы замещения (рис. 5.16, а) имеем  где
где  и
и  — токи рабочих контуров для Т- и Г-образной схем замещения.
— токи рабочих контуров для Т- и Г-образной схем замещения.
Появившийся в этой схеме замещения комплекс  практически всегда можно заменить модулем С1 который для асинхронных двигателей мощностью 10 кВт и выше равен 1,02. 1,05. При анализе электромагнитных процессов в машинах общего применения часто полагают С1≈1, что существенно облегчает расчеты и мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром (рис. 5.16, б). В этой схеме ток
практически всегда можно заменить модулем С1 который для асинхронных двигателей мощностью 10 кВт и выше равен 1,02. 1,05. При анализе электромагнитных процессов в машинах общего применения часто полагают С1≈1, что существенно облегчает расчеты и мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром (рис. 5.16, б). В этой схеме ток  без большой погрешности можно приравнять току I.
без большой погрешности можно приравнять току I.
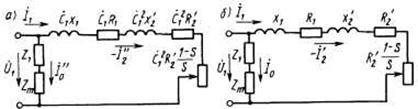
Рис. 5.16. Г-образные схемы замещения асинхронной машины (а, б)