Схемы торможения асинхронных двигателей
 После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
После отключения от сети электродвигатель продолжает движение по инерции. При этом кинетическая энергия расходуется на преодоление всех видов сопротивлений движению. Поэтому скорость электродвигателя через промежуток времени, в течение которого будет израсходована вся кинетическая энергия, становится равной нулю.
Такая остановка электродвигателя при движении по инерции называется свободным выбегом . Многие электродвигатели, работающие в продолжительном режиме или со значительными нагрузками, останавливают путем свободного выбега.
В тех же случаях, когда продолжительность свободного выбега значительна и оказывает влияние на производительность электродвигателя (работа с частыми пусками), для сокращения времени остановки применяют искусственный метод преобразования кинетической энергии, запасенной в движущейся системе, называемый торможением .
Все способы торможения электродвигателей можно разделить на два основных вида: механическое и электрическое.
 При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При механическом торможении кинетическая энергия преобразуется в тепловую, за счет которой происходит нагрев трущихся и прилегающих к ним частей механического тормоза.
При электрическом торможении кинетическая энергия преобразуется в электрическую и в зависимости от способа торможения двигателя либо отдается в сеть, либо преобразуется в тепловую энергию, идущую на нагрев обмоток двигателя и реостатов.
Наиболее совершенными считают такие схемы торможения, при которых механические напряжения в элементах электродвигателя незначительны
Схемы динамического торможения асинхронных двигателей
Для управления моментом при динамическом торможении асинхронным двигателем с фазным ротором по программе с заданием времени используются узлы схем, приведенные н а рис. 1, из которых схема р и с. 1, а применяется пр и наличии сети постоянного тока, а схема рис. 1, б — при отсутствии ее.
В качестве тормозных резисторов в роторе используются пусковые резисторы R1, включение которых в режиме динамического торможения производится отключением контакторов ускорения, показанных в рассматриваемых узлах схем условно в виде одного контактора КМ3, команда на отключение которого подается блокировочным контактом линейного контактора КМ1.
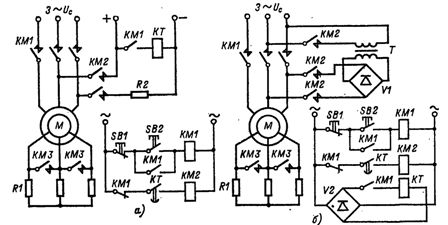
Рис. 1 Схемы управления динамическим торможением асинхронных двигателей с фазным ротором с заданием времени при наличии и отсутствии сети постоянного тока
Эквивалентное значение постоянного тока в обмотке статора при торможении обеспечивается в схеме рис. 1, а дополнительным резистором R2, а в схеме рис. 1. б соответствующим выбором коэффициента трансформации трансформатора Т.
Контактор торможения КМ2 может быть выбран как на постоянном, так и на переменном токе в зависимости от требуемого числа включений в час и использования пусковой аппаратуры.
Приведенные н а рис. 1 схемы управления могут использоваться для управления режимом динамического торможения асинхронного двигателя с короткозамкнутым ротором. Для этого обычно используется схема с трансформатором и выпрямителем, приведенная на р и с. 1 , б.
Схемы торможения противовключением асинхронных двигателей
При управлении моментом при торможении противовключением асинхронного двигателя с короткозамкнутым ротором с контролем скорости применяется узел схемы, приведенный на рис. 2.
В качестве реле противовключения используется реле контроля скорости SR, укрепляемое на двигателе. Реле настраивается на напряжение отпадания, соответствующее скорости, близкой к нулю и равной (0,1 — 0,2) ω уст.
Схема используется для остановки двигателя с торможением противовключением в реверсивной (рис. 2, а) в в нереверсивной (рис. 2, б) схемах. Команда SR используется для отключения контакторов КМ2 или КМЗ и КМ4, отключающих обмотку статора от напряжения сети при скорости двигателя, близкой к нулю. При реверсировании двигателя команды SR не используются.
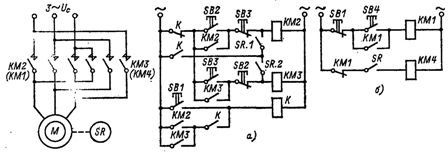
Рис. 2 Узлы схемы управления торможения противовключением асинхронного двигателя с коооткозамкнутым ротором с контролем скорости при остановке в реверсивной и нереверсивной схемах
Узел управления асинхронным двигателем с фазным ротором в режиме торможения противовключеиием с одной ступенью, состоящей из R1 и R2, приведен на рис. 3. Управляющее реле противовключения KV, в качестве которого применяется, например, реле напряжения постоянного тока типа РЭВ301, которое подключено к двум фазам ротора через выпрямитель V. Реле настраивается на напряжение отпадания.
Часто для настройки реле KV используется дополнительный резистор R3. Схема в основном применяется при реверсировании АД со схемой управления, приведенной на рис. 3, а, но может использоваться и при остановке в нереверсивной схеме управления, приведенной на рис. 3, б.
При пуске двигателя реле противовключения КV не вклгочатся и ступень противовключения резистора ротора R1 выводится сразу после подачи управляющей команды на пуск.
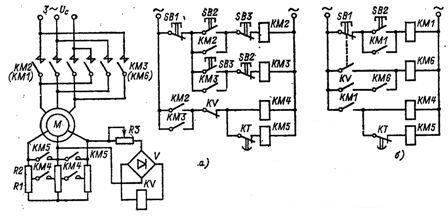
Реле KV отключает контакторы КМ4 и КМ5 и тем самым вводит полное сопротивление Rl + R 2 ротор двигателя.
В конце процесса торможения при скорости асинхронного двигателя, близкой к нулю и составляющей примерно 10 — 20 % установившейся начальной скорости ω пер = (0,1 — 0,2) ωуст , реле KV отключается, обеспечивая команду на отключение ступени противовключения R1 с помощью контактора КМ4 и на реверсирование электродвигателя в реверсивной схеме или команду на остановку электродвигателя в нереверсивной схеме.
В приведенных схемах в качестве управляющего устройства может применяться командоконтроллер и другие аппараты.
Схемы механического торможения асинхронных двигателей
При остановке асинхронных двигателей, а также для удержания механизма передвижения или подъема, например в крановых промышленных установках, в неподвижном состоянии при отключенном двигателе применяется механическое торможение. Оно обеспечивается электромагнитными колодочными или другими тормозами с трехфазным электромагнитом переменного тока, который при включении растормаживает тормоз. Электромагнит тормоза YB включается и отключается вместе с двигателем (рис 4, а).
Напряжение на электромагнит тормоза YB может подаваться контактором торможения КМ2, если нужно отключать тормоз не одновременно с двигателем, а с некоторой задержкой по времени, например после окончания электрического торможения (рис. 4, б)
Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 4, в).
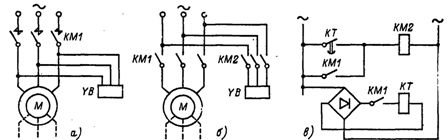
Рис. 4. Узлы схем, осуществляющих механическое торможение асинхронных двигателей
В асинхронных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постоянного тока.
Схемы конденсаторного торможения асинхронных двигателей
Для торможения АД с короткозамкнутым ротором применяется также конденсаторное торможение с самовозбуждением. Оно обеспечивается конденсаторами C1 — С3, подключенными к обмотке статора. Включаются конденсаторы по схеме звезды (рис. 5, а) или треугольника (рис. 5, б).
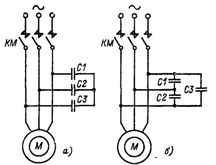
Рис. 5. Узлы схем, осуществляющих конденсаторное торможение асинхронных двигателей
Схемы управления двигателями в функции скорости
 При управлении двигателями в функции скорости контролируется частота вращения ротора двигателя, чтобы в зависимости от ее изменения воздействовать на соответствующие элементы управления.
При управлении двигателями в функции скорости контролируется частота вращения ротора двигателя, чтобы в зависимости от ее изменения воздействовать на соответствующие элементы управления.
В схемах управления пуском двигателя можно использовать реле контроля скорости или небольшие измерительные электрические генераторы. Однако они применяются крайне редко для этих целей из-за сложности конструкции, высокой стоимости и недостаточной надежности. Поэтому частота вращения двигателя контролируется косвенными методами. В асинхронных и синхронных двигателях частота вращения контролируется через ЭДС и частоту тока в роторе, а в двигателях постоянного тока — через ЭДС якоря.
На рис. 1, а и б изображены схемы автоматического пуска двигателя постоянного тока с параллельным возбуждением в функции частоты вращения и в зависимости ЭДС и напряжения якоря от времени пуска. Контроль частоты вращения осуществляют измерением ЭДС двигателя, которая изменяется пропорционально частоте вращения.
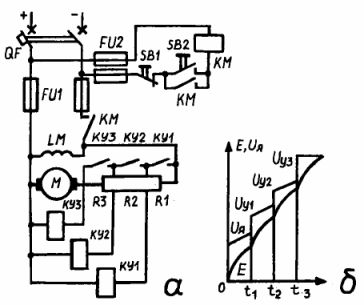
Рис. 1. Схемы управления в функции скорости: а и б — схема и диаграмма пуска двигателя постоянного тока с параллельным возбуждением
Так как ЭДС пропорциональна частоте вращения двигателя, то автоматическое введение отдельных ступеней пускового реостата производится при определенной величине напряжения срабатывания контакторов ускорения КМ1, КМ2 и КМЗ, каждый из которых настроен на определенную величину втягивания. Нажатием пусковой кнопки SB2 включается линейный контактор КМ. Все сопротивления R1, R2, R3 будут включены последовательно с обмоткой якоря и ограничат ток.
При определенной частоте вращения n1 напряжение U у1 на катушке контактора К1 равно

где Се — коэффициент машины.
Когда U у1 будет равно напряжению втягивания, сработает контактор КМ1 и закоротит сопротивление R1. Дальнейшее увеличение частоты вращения до вращения n2 и n3 приведет к возрастанию напряжения на катушках контакторов К2 и КЗ до величин


При этом будут поочередно срабатывать контакторы К2 и КЗ и закорачивать сопротивления R2 и R3. После закорачивания сопротивления R3 закончится процесс пуска и двигатель может длительное время работать.
ЭДС в цепи ротора асинхронного двигателя пропорциональна скольжению, т. е. E2s = E2s. Здесь Е2 — ЭДС неподвижного ротора.
Величина ЭДС тем меньше, чем меньше скольжение, т. е.. чем выше частота вращения ротора двигателя. Для управления пуском двигателей переменного тока с фазным ротором используют реле, контролирующие величину ЭДС в цепи ротора. На эти напряжения настраивают соответствующие аппараты (реле, контакторы), закорачивающие пусковые сопротивления.
Для управления асинхронными двигателями с фазным ротором и синхронными двигателями в функции скорости может использоваться также и частотный метод. Этот метод основан на известной зависимости частоты тока ротора f2 от частоты вращения поля статора n 0 и ротора n 2, т. е.
Так как любой частоте вращения ротора соответствует определенное значение f2, то реле, настроенное на эту частоту и включенное в цепь ротора двигателя, будет воздействовать на цепь катушки контактора. Контактор будет закорачивать ступени сопротивления при заданной частоте вращения.
Торможение противовключением двигателей выполняется в функции скорости с использованием реле контроля скорости SR. На рис. 2, а, б показаны примеры торможения асинхронных двигателей противовключением.
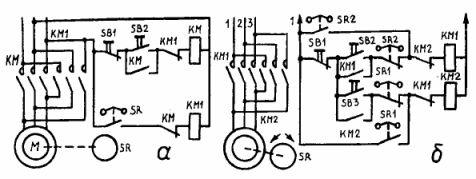
Рис. 2. Схемы торможения асинхронных двигателей противовключением: а — нереверсивного; б — реверсивного
Рассмотрим принципы работы этих схем.
При нажатии на кнопку SB2 включается катушка контактора КМ (см. рис. 2,а), замыкающая силовые контакты и блокирующая кнопку SB2. Одновременно размыкающий блок-контакт КМ в цепи катушки тормозного контактора КМ1 и реле контроля скорости SR отключает их от сети. Когда ротор двигателя разовьет некоторую частоту вращения, контакт SR замкнется, но это уже не вызовет срабатывания контактора КМ1. Двигатель продолжает нормально работать.
Останов двигателя с торможением противовключением выполняется нажатием кнопки SB. При этом обесточивается катушка контактора КМ, а его главные контакты отпадают и отключают двигатель от сети. Размыкающий контакт КМ в цепи катушки тормозного контактора КМ1 замкнется. Так как в этот момент контакт реле контроля скорости SR замкнут, то немедленно включаются главные контакты тормозного контактора, и обмотка статора переключается на реверсирование, магнитное поле начнет вращаться в обратном направлении, т. е. навстречу вращению ротора, и произойдет торможение двигателя противовключением. Частота вращения ротора уменьшается и при определенной малой величине ее контакты реле контроля скорости РКС разомкнутся и отключат двигатель от сети.
При реверсивном управлении с торможением противовключением (рис. 2,б) пуск двигателя вперед выполняется нажатием кнопки SB1, которая, замыкая цепь катушки контактора КМ1, обеспечивает включение двигателя в сеть. Ротор двигателя начнет вращаться и при достижении им определенной частоты вращения, замыкающий контакт SR1 реле контроля скорости замкнется, а размыкающий контакт SR2 разомкнётся.
Однако включение катушки контактора КМ2 не произойдет, так как размыкающий контакт контактора КМ1 разорвал ее цепь. В таком положении двигатель будет продолжать работать, пока не нажмут кнопку SB. При нажатии на кнопку SB обесточивают цепь катушки КМ1. При этом замкнется размыкающий контакт КМ1, и цепь катушки контактора КМ2 получит электропитание.
Обмотка статора двигателя включится на реверсирование. Так как ротор по инерции продолжает вращаться в прежнем направлении, происходит торможение противовключением. При уменьшении частоты вращения до определенной малой величины реле контроля скорости размыкает свой контакт SR1, контактор КМ2 обесточится и отключит двигатель от сети.
Для того чтобы произвести пуск двигателя в обратном направлении, нажимают на кнопку SB2. Весь процесс будет аналогичен описанному. Теперь роль тормозного контактора выполняет контактор КМ1, а управлять процессом торможения будут контакты SR2 реле контроля скорости.
Автоматизированный пуск синхронного двигателя связан с известными трудностями, так как при этом надо не только ограничить пусковой ток, но и осуществить синхронизацию машины с сетью.
Схема управления синхронным двигателем небольшой мощности показана на рис. 3. Ограничение величины пускового тока обеспечивается при помощи активных сопротивлений, включенных в обмотку статора. Перед пуском двигателя включают автоматические вводные выключатели QF и QF1 сетей переменного и постоянного тока, которые обеспечивают максимальную и тепловую защиту. Нажатием пусковой кнопки SB2 включают катушку контактора КМ, и обмотка статора синхронного двигателя через главные контакты КМ присоединяется к сети через пусковые сопротивления Rn. Катушка самоблокируется, и ее контакт в цепи постоянного тока включает блокировочное реле KV, замыкающий контакт которого, замыкаясь, подготавливает катушки контакторов К1 и К2 к включению.
Реле частоты KF1 и KF2, входящие в цепь возбуждения ротора LM, действуют в зависимости от частоты вращения двигателя. При пуске, когда скольжение ротора наибольшее, размыкающие контакты реле KF1 и KF2 размыкаются. Размыкание катушек происходит раньше, чем включится блокировочное реле KV, и катушка К1 питания не получит. Повторно контакты реле KF1 и KF2 замкнутся тогда, когда частота вращения двигателя достигнет примерно 60—95 % синхронной в соответствии с регулированием реле.
После замыкания контактов реле KF1 включится катушка контактора К1, ее контакты в главной цепи закоротят пусковые резисторы Rп, и статор окажется включенным на полное напряжение сети. При замыкании размыкающихся контактов реле KF2 создается цепь для питания катушки контактора К2, независимая от контактора К1, его контакт размыкается при частоте вращения, равной примерно 60 % синхронной.
Контактор К2 имеет две катушки: одну основную, втягивающую КМ1 и вторую катушку КМ2, предназначенную для освобождения защелки, которой снабжен контактор. После включения втягивающей катушки КМ1 замыкающие контакты К2 замыкаются в цепи возбуждения, а размыкающие контакты К2 размыкаются, отключая обмотку ротора от разрядных резисторов R1 и R2 и присоединяя ротор к сети постоянного тока.
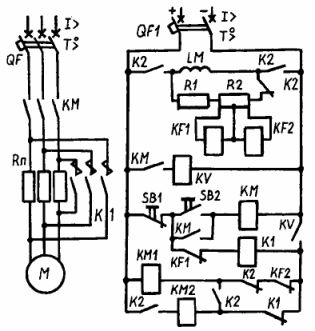
Рис. 3. Схема управления синхронным двигателем
Контакты контактора К2 работают в следующем порядке. Размыкающий контакт К2 размыкается в цепи питания втягивающей катушки, но благодаря наличию защелки контактор остается включенным. Замыкающие контакты К2 замыкаются в цепи питания обеих катушек и в цепи катушки КМ2, подготавливая цепь к последующему включению. Катушка К2 обесточится как только механизм защелки будет освобожден катушкой КМ2. Двигатель отключается от сети нажатием кнопки SB1. Катушка К1 отпускает свой размыкающий контакт в цепи катушки КМ2, которая освобождает защелку и отключает катушку КМ1, после чего схема приходит в исходное положение.