Схема управления подъемной машины
Схема управления подъемной машиной с гидравлическим тормозом отличается от описанной выше схемы машин с пневматическим тормозом (см. рис. 135) частичными изменениями в цепи контактора предохранительного тормоза ТП и тем, что от контактора ЗК вместо двигателя компрессора ДК питаются двигатели маслонасосов тормозной системы. Кроме того, в машинах с гидравлическим тормозом имеется только один электромагнит предохранительного тормоза МТП .

Рис. 1. Цепь контактора ТП подъемной машины с гидротормозом
Рекламные предложения на основе ваших интересов:
В цепи контактора ТП на машинах с гидравлическим тормозом имеется контакт блокировочного выключателя ВБТР , связанный с рукояткой рабочего тормоза и замыкающийся при установке этой рукоятки в положение «Заторможено». Кнопка П, введенная в цепь ТП, предотвращает самопроизвольное снятие предохранительного торможения.
Для управления приводом тормоза в последнее время применяется аппаратура АУГТ . Для примера рассмотрим электрическую схему управления гидроприводом тормоза с применением аппаратуры АУГТ во взрывобезопасном исполнении.
При дистанционном управлении катушка КТР регулятора РДВГ включена на разность напряжений, снимаемых с выпрямителей ВГ2 и ВГЗ , на которые включены соответственно тормозной ко-мандоаппарат 846У-3-19 и устройство обратной связи УОС .
Управление гидроприводом тормоза подъемных машин с помощью электрогидравлического регулятора РДВГ сводится к изменению положения рукоятки тормозного командоаипарата, которая приводит к изменению угла поворота бесконтактного сельсина, и следовательно, к изменению тока, проходящего по катушке КТР . В положении, когда подъемная машина заторможена рабочим тормозом, сигнал, выдаваемый бесконтактным сельсином устройства обратной связи СОС , должен быть равен нулю. Сигнал, выдаваемый бесконтактным сельсином тормозного командоаипарата, должен обеспечить прохождение дежурного тока по катушке К TP около 40 мА, что приведет к включению реле контроля тока РКТ и замыканию контакта РКТ в цепи реле РП, которое, в свою очередь, восстановит свой контакт РП цепи защиты и создаст возможность включения катушки предохранительного тормоза КТП .
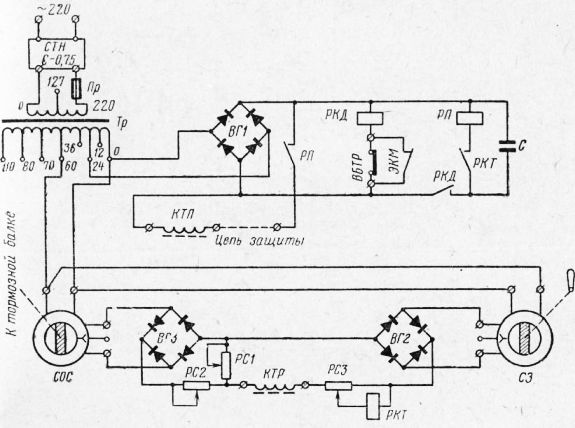
Рис. 2. Электрическая схема управления гидроприводом тормоза с применением аппаратуры АУГТ во взрывобезопасном исполнении
Сельсины в необходимое положение устанавливают поворотом статора сельсина в корпусе оболочки или оболочки по соответствующим пазам в корпусе аппаратов. По мере перемещения рукоятки тормозного командоаппарата и поворота ротора во вторичной обмотке сельсина и, следовательно, в обмотке происходит изменение тока от дежурного до максимального, и наоборот. С увеличением тока, проходящего по катушке КТР под действием возрастающей м. д. е., якорь электромагнита с клапаном начнет перемещаться вниз, перекрывая выходное отверстие из камеры управления. При этом равновесие золотника нарушается, Давление в рабочем цилиндре увеличивается до заданной величины и поршень в ЦРТ перемещается. При перемещении поршня рабочего цилиндра вверх изменяется положение рычага исполнительного органа, и в работу вступает сельсин устройства обратной связи. Увеличение угла поворота его ротора ведет к увеличению тока, направленного встречно току сельсина тормозного командоаппарата. В результате в катушке КТР устанавливается результирующий ток, необходимый для получения нужного тормозного момента. При каждом установившемся результирующем токе в катушке КТР поршень займет новое устойчивое положение.
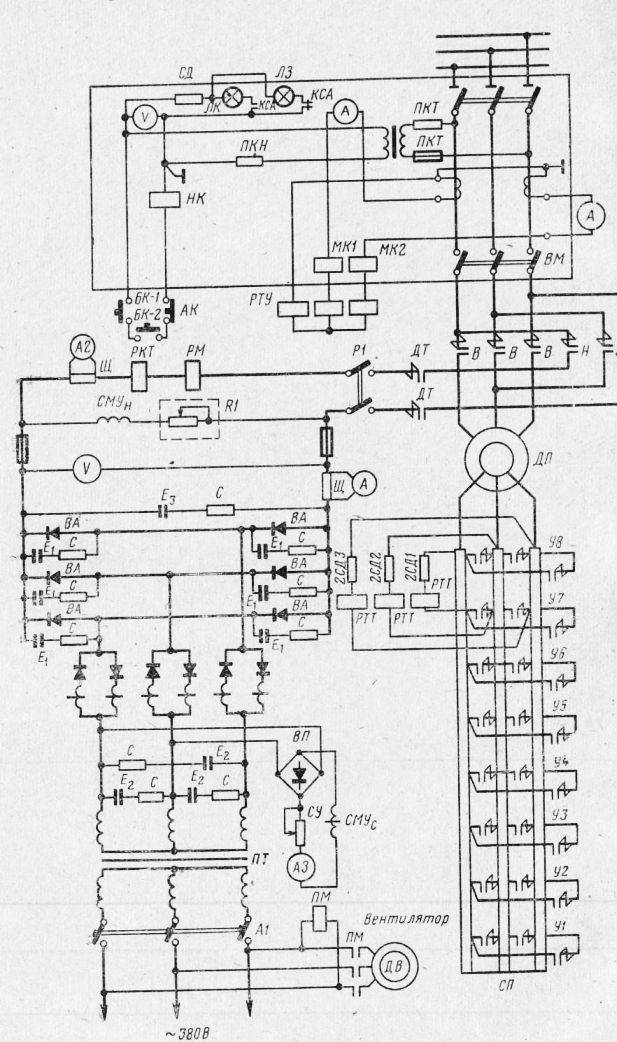
Рис. 3. Схема управления клетевой подъемной установкой с асинхронным приводом
При перемещении рукоятки тормозного командоаппарата в сторону затормаживания уменьшается ток, проходящий в катушке КТР . При этом золотник регулятора РДВГ , поднимаясь вверх, уменьшит давление под поршнем рабочего цилиндра 20. Поршень, опускаясь вниз, уменьшит величину встречного тока от сельсина устройства обратной связи.
В цепи катушки КТР установится новый результирующий ток, необходимый для создания требуемого тормозного момента. Процесс будет продолжаться при дальнейшем изменении угла поворота ротора сельсина тормозного командоаппарата.
Качественной работы тормозного устройства (большого числа ступеней и плавного изменения положения поршня) добиваются подбором величины балластных сопротивлений РС1 и РС2.
На рис. 3 показана схема управления клетевой подъемной установкой с асинхронным приводом, которая отличается от описанных выше применением аппаратуры КУПТ -1 для управления приводом тормоза и статического преобразователя на магнитном усилителе с выходом на постоянном токе для динамического торможения.
Схема управления подъемной машины
Схема управления подъемной установкой состоит из нескольких самостоятельных узлов: схемы управления и защиты синхронного двигателя, преобразовательного агрегата, собственно схемы управления подъемным двигателем, схемы управления вспомогательными приводами и сигнализации.
На рис. 1 показана схема управления и защиты синхронного двигателя преобразовательного агрегата. В схеме предусмотрен прямой пуск двигателя от полного напряжения сети. Обмотка ротора двигателя при пуске замкнута на якорь возбудителя через сопротивление гашения СГ, которое шунтируется контактами контактора М при достижении двигателем подсинхронной скорости. Контактор М имеет катушку включения М(вк) и катушку отключения М(ок).
При включении масляного выключателя Л напряжение сети подается на статор синхронного двигателя СД. Благодаря наличию на роторе пусковой короткозамкнутой обмотки двигатель разворачивается как асинхронный короткозамкнутый.
Рекламные предложения на основе ваших интересов:
В начале разгона при протекании большого пускового тока втягивается реле РПТ , замыкающее свои контакты в цепи промежуточного реле РБ1. Реле РБ1, втянувшись, включает промежуточное реле РБ2.

Рис. 1. Схема управления и защиты синхронного двигателя преобразовательного агрегата
При достижении двигателем подсинхронной скорости (97—98% номинальной) его ток снижается настолько, что реле РИТ отключается, а вслед за ним отключается и реле РБ1. После отключения реле РБ1 реле РБ2 отключается не сразу, а с выдержкой времени, в течение которого реле РБ2 успевает включить контактор возбуждения М, так как цепь его включающей катушки оказывается замкнутой через замыкающие контакты РБ2 и размыкающие контакты РБ1. Происходящее вслед за тем отключение реле РБ2 и размыкание его контакта в цепи катушки М(вк) не вызывает отключения контактора возбуждения, так как отключающая катушка М(ок) обесточена и удерживает контактор М во включенном положении.
Защита от перегрузки, длительного асинхронного режима (при выходе двигателя из синхронизма) и коротких замыканий осуществляется максимальными реле РМ1 и РМ2 с ограниченно зависимой выдержкой времени (типа РТ-80), включенными в цепь трансформаторов тока. При срабатывании реле РМ1 или РМ2 включается промежуточный контактор защиты РЗП , и одновременно срабатывает блинкер БСЗ . При этом размыкающим контактом РЗП в цепи нулевой катушки масляного выключателя производится отключение синхронного двигателя от сети.
Защита от исчезновения напряжения питающей сети осуществляется нулевой катушкой масляного выключателя. При кратковременном снижении напряжения в сети отпадает реле форсировки возбуждения при этом включается контактор форсировки Ф и своими замыкающими контактами шунтирует реостат возбуждения РШВ возбудителя синхронного двигателя ВСД . Ток возбуждения увеличивается, благодаря чему предотвращается выпадание двигателя из синхронизма.
Контроль напряжения постоянного тока 220В цепей защиты синхронного двигателя осуществляется с помощью реле. Размыкающие контакты этого реле при исчезновении напряжения сигнализируют об этом блинкером БС1 и лампой аварийной сигнализации ЛАС .
Защита от замыкания на землю обмотки статора осуществляется с помощью реле РЗ, включенного на вторичную обмотку трансформатора. Контакт реле через блинкер включает контактор защиты РЗП и отключает двигатель от сети.
На станции управления установлены: амперметр тока статора синхронного двигателя, амперметр тока возбуждения синхронного двигателя зеленая лампа, свидетельствующая о готовности к пуску синхронного двигателя; красная лампа ЛК, которая горит при работающем синхронном двигателе, и лампа аварийной сигнализации ЛАС .
Отключение синхронного двигателя осуществляется: воздействием вручную на привод масляного выключателя; кнопкой с пульта управления; универсальным переключателем со станции управления; при срабатывании защит.
При срабатывании контактора защиты РЗП включается реле PC, которое замыкает свои контакты в цепи звуковой сигнализации сирены.
При отключении масляного выключателя Л подается напряжение на катушку М(ок). Якорь катушки М(ок) втягивается и своим контактом обесточивает катушку М (вк). Контактор М отпадает и своими контактами М (вк) обесточивает отключающуюся катушку М (ок).
На рис. 2 показана схема управления подъемным двигателем в системе Г—Д и применением электромашинного усилителя.
Подъемный двигатель Д питается от генератора Г. Регулирование скорости подъемного двигателя в период его работы и изменение направления вращения производятся изменением величины напряжения и полярности на зажимах его якоря.
Ток возбуждения подъемного двигателя в период его работы остается неизменным и снижается контактором КОП примерно наполовину в период пауз.
Изменение величины напряжения и полярности на зажимах якоря двигателя достигается изменением величины тока и направления его в обмотке возбуждения главного генератора Г.
Обмотка возбуждения подъемного двигателя получает питание от вспомогательного генератора ВГ, а главного генератора — от электромашинного усилителя У.
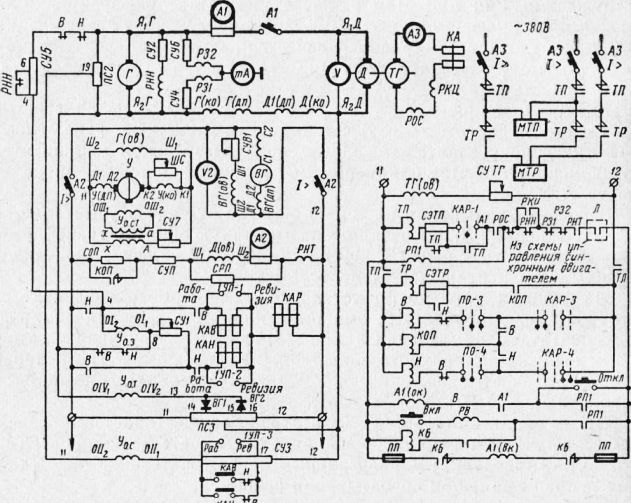
Рис. 2. Схема управления подъемной установкой с приводом Г—Д и применением ЭМУ
Изменение величины напряжения и полярности на зажимах обмотки возбуждения главного генератора производится изменением результирующей намагничивающей силы и ее направления в ЭМУ .
Обычно применяемый в схемах управления электромашинный усилитель ЭМУ -110 имеет четыре обмотки управления по выполняемым функциям: задающая; главной отрицательной обратной связи по напряжению У0 и (или по скорости У0 с); токоограничения У0 т и стабилизирующая У0 ст.
Направлением и величиной тока в обмотке задаются направление и скорость вращения приводного двигателя. Направление тока в обмотке определяется включением контакторов направления вращения В или Н. Для регулирования величины тока в обмотке и, следовательно, скорости двигателя в цепи установлены командоаппарата КАВ , КАН и КАР . При нормальной работе подъемной установки с одного горизонта регулирование скорости в периоды разгона и замедления осуществляется командоаппаратами КАВ и КАН , связанными с ретардирующими дисками указателя глубины. При этом сопротивление КАР полностью зашунтировано. Однако с помощью ручного командоаппарата КАР машинист может в любой момент вмешаться в управление и снизить скорость или остановить машину.
При наличии промежуточных горизонтов устанавливают командоаппарата, посредством которых регулируют скорость машины в периоды подхода к этим горизонтам и отхода от них.
Обмотка У0 з выполняет также функцию обмотки гашения остаточного магнетизма.
При установке рукоятки КАР в нулевое положение отпадают контакторы В (или Н) и КОП , в результате чего обмотка У0 РНН и своими размыкающими контактами зашунти-рует часть сопротивления СУ5, чем ускорит снижение и уменьшит величину остаточного напряжения до нуля.
В процессе работы подъемной машины ее скорость должна точно соответствовать значению тока в задающей обмотке усилителя. Однако этому препятствует явление гистерезиса генератора и ЭМУ , а также изменения статической нагрузки. Для уменьшения их влияния вводится отрицательная обратная связь, т. е. система делается замкнутой. Отрицательная обратная связь может быть по напряжению или по скорости. В любом случае магнитный поток, создаваемый обмоткой главной обратной связи направлен встречно магнитному потоку обмотки задания, а по величине выбирается таким образом, чтобы суммарный магнитный поток обеих обмоток обеспечивал заданное напряжение генератора.
Обмотка. с включена через сопротивление СУЗ в диагональ тахометрического моста (точки 19 и Я%Д), плечами которого являются плечи сопротивления ПС2, якорь двигателя Д и обмотки дополнительных полюсов, компенсационные обмотки генератора и двигателя. В другую диагональ подается напряжение от якоря генератора — Г. Если плечи моста уравновешены, то при заторможенном двигателе в обмотке У0. с не появляется ток, какое бы напряжение ни развивал генератор. Но как только двигатель приходит во вращение, в его якоре индуктируется противо-э. д. е., направленная встречно подводимому напряжению. Появление этой противо-э. д. с. можно условно рассматривать как увеличение сопротивления якоря двигателя. Следовательно, когда двигатель приходит во вращение, нарушается равновесие моста, и в обмотке У0.с появляется ток, величина которого зависит от скорости вращения двигателя. При увеличении нагрузки на подъемный двигатель его скорость несколько снижается, ток в обмотке У0. с уменьшается, что вызывает некоторое увеличение напряжения генератора, а значит и скорости двигателя. Благодаря этому скорость подъемного двигателя поддерживается близкой к заданному уровню независимо от колебаний нагрузки. Следовательно, введение обратной связи по скорости увеличивает жесткость характеристик двигателя в системе Г—Д.
Благодаря введению главной обратной связи уменьшается также время протекания переходных процессов в системе.
Обратная связь по скорости может быть выполнена, кроме того, включением обмотки У0. с на якорь тахогенератора.
На практике иногда применяют усиление отрицательной обратной связи в конце периода замедления. При подходе подъемного сосуда к разгрузочным кривым контакты командоаппарата КАВ или КАН замыкаются с помощью замедляющего профиля ретардирующего устройства и шунтируют часть добавочного сопротивления СУЗ в цепи обмотки У0.с (или У0.н). При этом ток в обмотке обратной связи возрастает.
Разгоняющие профили должны быть несколько ниже замедляющих, чтобы блок-контакты командоаппаратов КАВ и КАН ими не замыкались. Тогда усиления обратной связи в период разгона происходить не будет.
Благодаря введению усилия обратной связи в конце периода замедления достигается более точное регулирование скорости и остановка сосудов. Контактами переключателя 1УП-3 усиливается обратная связь для ревизии ствола и канатов.
Узел токоограничения служит для предохранения механической части подъема и якорей генератора и двигателя от чрезмерных перегрузок, а также обеспечения плавного замедления и ускорения подъемной машины независимо от возможных резких перемещений рукоятки КАР . Токоограничительная система действует автоматически как при двигательном, так и при генераторном режимах работы.
Ограничение тока в главной цепи происходит следующим образом: падение напряжения на обмоткдх дополнительных полюсов и компенсационных обмоток генератора и двигателя подается через два полупроводниковых выпрямителя и через нлечи сопротивления ПСЗ (точки 14—15 и 15—16) на обмотку У0 т. Одновременно на сопротивление ПСЗ подается напряжение от генератора ВТ.
При малых токах главной силовой цепи напряжение, снимаемое с зажимов Я2Г и Я2Д, меньше, чем падение напряжения на концах потенциометра ПСЗ (точки 14—15 и 15—16). Поэтому обмотка У0 т током не обтекается и влияния на работу подъемной машины не оказывает.
При значительных токах в главной цепи это напряжение превышает имеющееся напряжение на плечах сопротивления ПСЗ и по обмотке У0 т протекает ток. Обмотка У0 т включается так, что создаваемый ею поток направлен против потока, создаваемого обмоткой при работе двигателя в двигательном режиме, и согласно потоку обмотки У0 3 — при работе в генераторном режиме. Благодаря этому происходит ограничение тока главной цепи.
Для достижения устойчивости системы и получения плавного переходного процесса предусматривается стабилизирующее устройство (гибкая обратная связь). Для стабилизации используется специальная обмотка ЭМУ У о ех, которая включается таким образом, что магнитный поток, создаваемый ею, противодействует всяким изменениям установившегося режима системы.
На рассматриваемом рисунке показано включение обмотки У0 ст через стабилизирующий трансформатор. При возрастании, например, напряжения ЭМУ во вторичной обмотке трансформатора индуктируется э. д. с. пропорциональная скорости возрастания напряжения ЭМУ . Обмотка У0 ст включена так, чтобы при возрастании напряжения усилителя в ней протекал размагничивающий ток, тем больший, чем быстрее изменяется напряжение усилителя. Вследствие этого скорость изменения напряжения усилителя уменьшается, усилитель не так резко реагирует на импульсы, подаваемые в обмотку управления, и система управления становится более устойчивой.
На рис. 3 показана схема управления подъемной установкой с приводом Г—Д и применением промежуточного магнитного ( ПМУ ) и электромашинного ( ЭМУ ) усилителей. В этой схеме сигналы управления и обратных связей воздействуют на обмотки управления ПМУ , на выход которого включены три обмотки управления ЭМУ : У1, У2 и УЗ.
Одна из обмоток электромашинного усилителя У4 включена через установочное сопротивление СУ4 на выход усилителя, чем осуществляется отрицательная обратная связь по напряжению ЭМУ .
Наличие шести обмоток ПМУ позволяет разделить узел задающей обмотки ПМУ0 з и узел гашения. Для узла гашения использована отдельная обмотка управления ПМУ0 т.
Узел задания выполнен с применением сельсинов бесконтактных командоаппаратов КАВ , КАН и КАР .
Главная обратная связь по скорости выполнена в данном случае от тахогенератора, но она может быть выполнена и с помощью тахометрического моста.
Для стабилизации системы используют гибкую обратную связь по э. д. с. самоиндукции обмотки возбуждения генератора. Для этого одну из обмоток магнитного усилителя ПМУ0 Ст включают в диагональ дифференцирующего моста, образуемого из трех омических сопротивлений СУ1, СУ2 и СУЗ и обмотки возбуждения главного генератора.
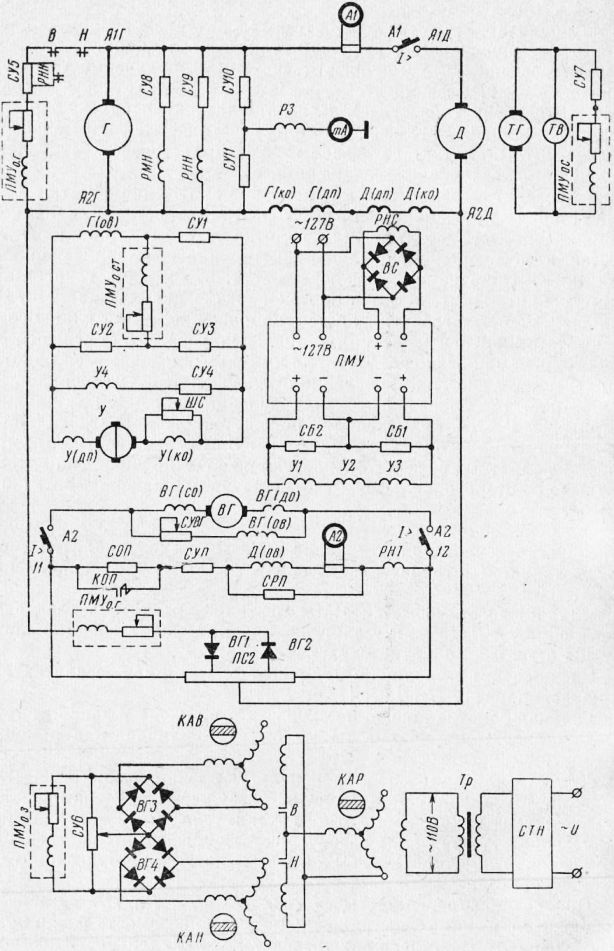
Рис. 3. Схема управления подъемной установкой с приводом Г—Д и применением ПМУ и ЭМУ
В других случаях стабилизацию системы можно осуществить, применяя стабилизирующие трансформаторы или цепочки RC.
В последнее время в связи с развитием полупроводниковой техники и освоением промышленностью тиристорных преобразователей для возбуждения генератора и двигателя в системе Г—Д вместо ЭМУ стали применять тиристорные преобразователи, благодаря которым повысилось быстродействие, стабильность и надежность системы управления.
На рис. 4 показана схема управления скиповым подъемом с двигателем постоянного тока, управляемым по системе Г—Д с тиристорным возбуждением.
Обмотка возбуждения генератора Г ов питается от тиристорного преобразователя ТП1. Сигналы управления и обратных связей по току и скорости подаются на обмотки управления ОУ1—ОУ5 высокочастотного магнитного усилителя на входе тиристорного преобразователя. Обмотка возбуждения двигателя М ов питается от тиристорного преобразователя ТП2. Сигналы задания тока возбуждения двигателя и обратной связи по току возбуждения подаются на обмотки управления ОУЗ и ОУ4 высокочастотного магнитного усилителя на входе преобразователя ТП2-
На рассматриваемом рисунке показаны два варианта максимальной защиты подъемного двигателя:
1) с помощью максимального реле РМ и линейного контактора;
2) с помощью быстродействующего автомата.
Наличие вращающихся преобразователей является существенным недостатком системы Г—Д. В последнее время разработан ряд систем, в которых машинный преобразователь заменяется статическим — управляемым ртутным выпрямителем (система УРВ — Д) или тиристорным преобразователем (система ТП—Д).
В случае применения систем УРВ—Д и ТП—Д для привода шахтных подъемных машин все управление сосредоточено в сеточных цепях ртутных выпрямителей или цепях управления тиристоров, т. е. управление происходит в маломощной и малоинерционной цепи.
В некоторых схемах для реверса применяют силовой переключатель, включенный в главную цепь двигателя, так как переключение в якорной цепи производится при нулевом токе; габариты переключателя относительно невелики. Применение такого переключателя исключает необходимость в перекрестных схемах.
Сеточное управление осуществляется с помощью статических фазорегуляторов. При этом в качестве промежуточного усилителя и суммирующего элемента в системе автоматического управления применяют, как правило, магнитные усилители.
В настоящее время для установок мощностью до 1000 кВт разработана система тиристорный преобразователь — двигатель. Преобразователь однокомплектный с реверсором в цепи якоря.