Три наиболее популярные схемы управления асинхронным двигателем
Все электрические принципиальные схемы станков, установок и машин содержат определенный набор типовых блоков и узлов, которые комбинируются между собой определенным образом. В релейно-контакторных схемах главными элементами управления двигателями являются электромагнитные пускатели и реле.
Наиболее часто в качестве привода в станках и установках применяются трехфазные асинхронные двигатели с короткозамкнутым ротором. Эти двигатели просты в устройстве, обслуживании и ремонте. Они удовлетворяют большинству требований к электроприводу станков. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи (в 5-7 раз больше номинального) и невозможность простыми методами плавно изменять скорость вращения двигателей.
С появлением и активным внедрением в схемы электроустановок преобразователей частоты такие двигатели начали активно вытеснять другие типы двигателей (асинхронные с фазным ротором и двигатели постоянного тока) из электроприводов, где требовалось ограничивать пусковые токи и плавно регулировать скорость вращения в процессе работы.
Одной из преимуществ использования асинхронных двигателей с короткозамкнутым ротором является простота их включения в сеть. Достаточно подать на статор двигателя трехфазное напряжение и двигатель сразу запускается. В самом простом варианте для включения можно использовать трехфазный рубильник или пакетный выключатель. Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления.
В схемах же станков и установок часто должна быть предусмотрена работа того или иного двигателя в автоматическом цикле, обеспечиваться очередность включения нескольких двигателей, автоматическое изменение направления вращения ротора двигателя (реверс) и т.д.
Обеспечить все эти функции с аппаратами ручного управления невозможно, хотя в ряде старых металлорежущих станков тот же реверс и переключение числа пар полюсов для изменения скорости вращения ротора двигателя очень часто выполняется с помощью пакетных переключателей. Рубильники и пакетные выключатели в схемах часто используются как вводные устройства, подающие напряжение на схему станка. Все же операции управления двигателями выполняются электромагнитными пускателями.

Включение двигателя через электромагнитный пускатель обеспечивает кроме всех удобств при управлении еще и нулевую защиту. Что это такое будет рассказано ниже.
Наиболее часто в станках, установках и машинах применяются три электрические схемы:
схема управления нереверсивным двигателем с использованием одного электромагнитного пускателя и двух кнопок «пуск» и «стоп»,
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок.
схема управления реверсивным двигателем с использованием двух пускателей (или одного реверсивного пускателя) и трех кнопок, в двух из которых используются спаренные контакты.
Разберем принцип работы всех этих схем.
1. Схема управления двигателем с помощью магнитного пускателя
Схема показана на рисунке.
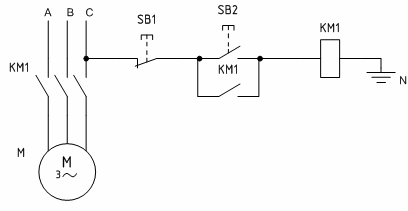
При нажатии на кнопку SB2 «Пуск» на катушка пускателя попадает под напряжение 220 В, т.к. она оказывается включенной между фазой С и нулем ( N) . Подвижная часть пускателя притягивается к неподвижной, замыкая при этом свои контакты. Силовые контакты пускателя подают напряжение на двигатель, а блокировочный замыкается параллельно кнопке «Пуск». Благодаря этому при отпускании кнопки катушка пускателя не теряет питание, т.к. ток в этом случае идет через блокировочный контакт.
Если бы блокировочный контакт не был бы подключен параллельно кнопки (по какой-либо причине отсутствовал), то при отпускании кнопки «Пуск» катушка теряет питание и силовые контакты пускателя размыкаются в цепи двигателя, после чего он отключается. Такой режим работы называют «толчковым». Применяется он в некоторых установках, например в схемах кран-балок.
Остановка работающего двигателя после запуска в схеме с блокировочным контактом выполняется с помощью кнопки SB1 «Стоп». При этом, кнопка создает разрыв в цепи, магнитный пускатель теряет питание и своими силовыми контактами отключает двигатель от питающей сети.
В случае исчезновения напряжения по какой-либо причине магнитный пускатель также отключается, т.к. это равносильно нажатию на кнопку «Стоп» и созданию разрыва цепи. Двигатель останавливается и повторный запуск его при наличии напряжения возможен только при нажатии на кнопку SB2 «Пуск». Таким образом, магнитный пускатель обеспечивает т.н. «нулевую защиту». Если бы он в цепи отсутствовал и двигатель управлялся рубильником или пакетным выключателем, то при возврате напряжения двигатель запускался бы автоматически, что несет серьезную опасность для обслуживающего персонала. Подробнее смотрите здесь — защита минимального напряжения.
Анимация процессов, протекающих в схеме показана ниже.
2. Схема управления реверсивным двигателем с помощью двух магнитных пускателей
Схема работает аналогично предыдущей. Изменение направления вращения (реверс) ротор двигателя меняет при изменении порядка чередования фаз на его статоре. При включении пускателя КМ1 на двигатель приходят фазы — A , B , С, а при включении пускателя KM2 — порядок фаз меняется на С, B , A.
Схема показана на рис. 2.
Включение двигателя на вращение в одну сторону осуществляется кнопкой SB2 и электромагнитным пускателем KM1 . При необходимости смены направления вращения необходимо нажать на кнопку SB1 «Стоп», двигатель остановится и после этого при нажатии на кнопку SB 3 двигатель начинает вращаться в другую сторону. В этой схеме для смены направления вращения ротора необходимо промежуточное нажатие на кнопку «Стоп».
Кроме этого, в схеме обязательно использование в цепях каждого из пускателей нормально-закрытых (размыкающих) контактов для обеспечения защиты от одновременного нажатия двух кнопок «Пуск» SB2 — SB 3, что приведет к короткому замыканию в цепях питания двигателя. Дополнительные контакты в цепях пускателей не дают пускателям включится одновременно, т.к. какой-либо из пускателей при нажатии на обе кнопки «Пуск» включиться на секунду раньше и разомкнет свой контакт в цепи другого пускателя.
Необходимость в создании такой блокировки требует использования пускателей с большим количеством контактов или пускателей с контактными приставками, что удорожает и усложняет электрическую схему.
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже.
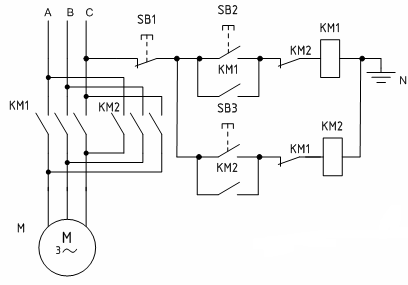
3. Схема управления реверсивным двигателем с помощью двух магнитных пускателей и трех кнопок (две из которых имеют контакты с механической связью)
Схема показана на рисунке.
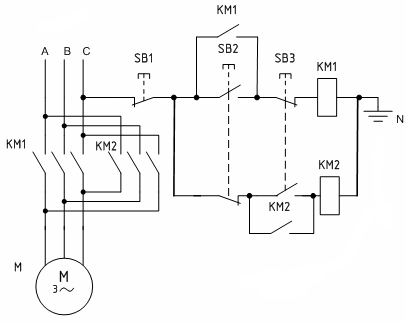
Отличие этой схемы от предыдущей в том, что в цепи каждого пускателя кроме общей кнопки SB1 «Стоп»включены по 2 контакта кнопок SB2 и SB 3, причем в цепи КМ1 кнопка SB2 имеет нормально-открытый контакт (замыкающий), а SB 3 — нормально-закрытый (размыкающий) контакт, в цепи КМ3 — кнопка SB2 имеет нормально-закрытый контакт (размыкающий), а SB 3 — нормально-открытый. При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается.
Такое использование кнопок позволяет отказаться от использования дополнительных контактов для защиты от одновременного включения двух пускателей (такой режим при этой схеме невозможен) и дает возможность выполнять реверс без промежуточного нажатия на кнопку «Стоп», что очень удобно. Кнопка «Стоп» нужна для окончательной остановки двигателя.
Приведенные в статье схемы являются упрощенными. В них отсутствуют аппараты защиты (автоматические выключатели, тепловые реле), элементы сигнализации. Такие схемы также часто дополняются различными контактами реле, выключателей, переключателей и датчиков. Также возможно питание катушки электромагнитного пускателя напряжение 380 В. В этом случае он подключается от двух любых фаз, например, от А и B . Возможно использование понижающего трансформатора для понижения напряжения в схеме управления. В этом случае используются электромагнитные пускатели с катушками на напряжение 110, 48, 36 или 24 В.
Многоскоростные электродвигатели и их использование — назначение и особенности, определение мощности при разных скоростях вращения
 Многоскоростные электродвигатели — асинхронные двигатели с несколькими ступенями частоты вращения, предназначены для привода механизмов, требующих ступенчатого регулирования частоты вращения.
Многоскоростные электродвигатели — асинхронные двигатели с несколькими ступенями частоты вращения, предназначены для привода механизмов, требующих ступенчатого регулирования частоты вращения.
Многоскоростные электродвигатели — электродвигатели специальной конструкции. Они имеют особую обмотку статора и нормальный короткозамкнутый ротор.
В зависимости от отношения полюсов, сложности схем и года выпуска многоскоростных электродвигателей, их статоры выполнены в четырех вариантах:
независимыми друг от друга односкоростнымн обмотками на две, три, даже четыре частоты вращения;
с одной или двумя полюсно-переключаемыми обмотками, в первом случае двухскоростными, а во втором — четырехскоростными;
с наличием трех частот вращения электродвигателя, одна обмотка изготовлена полюсно-переключаемой — двухскоростной, а вторая — односкоростиой, независимой — на любое число полюсов;
с одной полюсно-переключаемой обмоткой на три или четыре частоты вращения.
Электродвигатели с самостоятельными обмотками имеют плохое использование и заполнение пазов из-за наличия большого количества проводов и прокладок, что значительно снижает мощность по ступеням скоростей.
Наличие в статоре двух полюсно-переключаемых обмоток и особенно одной на три или четыре частоты вращения улучшает заполнение пазов и позволяет более рационально использовать сердечник статора, в результате чего повышаются мощности электродвигателя.
По сложности выполнения схем многоскоростные электродвигатели подразделяются на две части: с отношением полюсов равным 2/1 и — не равными 2/1. К первым относятся электродвигатели с частотой вращения — 1500/3000 об/мин или 2р = 4/2, 750/1500 об/мин или 2р = 8/4, 500/1000 об/мин или 2р = 12/6 и т. д. а ко вторым — 1000/1500 об/мин или 2р = 6/4, 750/1000 об/мин или 2р=8/6, 1000/3000 об/мин или 2р = 6/2, 750/3000 об/мин или 2р = 8/2, 600/3000 об/мин или 2р = 10/2, 375/1500 об/мин или 2р = 16/4 и т. д.
В зависимости от выбора схемы полюсно-переключаемой обмотки, при разном числе полюсов, электродвигатель может быть с постоянной мощностью или с постоянным моментом.
У электродвигателей с полюсно-переключаемой обмоткой и постоянной мощностью число витков в фазах при обеих числах полюсов будет одинаково или близко друг к другу, значит их токи и мощности будут одинаковы или близки. Вращающие моменты их будут разные, зависящие от числа оборотов.
У электродвигателей с постоянным моментом при меньшем числе полюсов катушечные группы, разделенные на две части в каждой фазе, включаются в двойной треугольник или двойную звезду параллельно, в результате чего число витков в фазе уменьшается, а сечение проводов, ток и мощность увеличиваются в два раза. При переключении с больших на меньшее число полюсов по схеме звезда/треугольник число витков уменьшается, а ток и мощность увеличатся в 1,73 раза. Значит при большей мощности и больших оборотах, а также при меньшей мощности и меньших оборотах вращающие моменты будут одинаковыми.
Наиболее простым способом получения двух разных чисел пар полюсов является устройство на статоре асинхронного двигателя двух независимых обмоток. Электротехнической промышленностью выпускаются такие двигатели с синхронными скоростями вращения 1000/1500 об/мин.
Существует, однако, ряд схем переключения проводников обмотки статора, при которых одна и та же обмотка может создать различные числа полюсов. Простое и широко распространенное переключение такого рода показано на рис. 1, а и б. Катушки статора, включенные последовательно, образуют две пары полюсов (рис. 1, а). Те же катушки, включенные в две параллельные цепи, как это показано на рис. 1, б, образуют одну пару полюсов.
Промышленность выпускает многоскоростные однообмоточные электродвигатели с последовательно-параллельным переключением и с отношением скоростей 1:2 с синхронными скоростями вращения 500/1000, 750/1500, 1500/3000 об/мин.
Описанный выше способ переключения не является единственным. На рис. 1, в приведена схема, образующая такое же число полюсов, как и схема, представленная на рис. 1, б.
Наибольшее распространение в промышленности получил, однако, первый способ последовательно-параллельного переключения , так как при таком переключении от обмотки статора может быть выведено меньше проводов, а следовательно, и переключатель может быть проще.
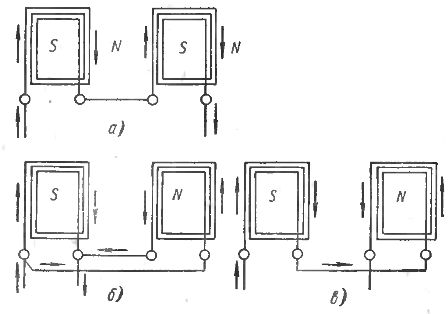
Рис. 1. Принцип переключения полюсов асинхронного двигателя.
Три фазовые обмотки могут быть включены в трехфазную сеть звездой или треугольником. На рис. 2, а и б показано широко распространенное переключение, при котором электродвигатель для получения меньшей скорости включается треугольником с последовательным соединением катушек, а для получения большей скорости — звездой с параллельным соединением катушек (так называемой двойной звездой).
Наряду с двухскоростными электропромышленность выпускает также трехскоростные асинхронные двигатели . В этом случае статор электродвигателя имеет две отдельные обмотки, одна из которых обеспечивает две скорости путем описанного выше переключения. Вторая обмотка, включаемая обычно в звезду, обеспечивает третью скорость.
При наличии на статоре электродвигателя двух независимых обмоток, каждая из которых допускает переключение полюсов, можно получить четырехскоростной электродвигатель. Числа полюсов подбирают при этом так, чтобы скорости вращения составили нужный ряд. Схема такого электродвигателя представлена на рис. 2, в.
Следует заметить, что вращающееся магнитное поле будет наводить в трех фазах неработающей обмотки три э. д. с, одинаковые по величине и сдвинутые по фазе на 120°. Геометрическая сумма этих электродвижущих сил, как известно из электротехники, равна нулю. Однако, вследствие неточной синусоидальности фазовых э. д. с. тока сети, сумма этих э. д. с. может быть отличной от нуля. В этом случае в замкнутой неработающей обмотке возникает ток, нагревающий эту обмотку.
В целях предотвращения этого явления схему переключения полюсов составляют таким образом, чтобы неработающая обмотка была разомкнута (рис. 12, в). Вследствие небольшой величины указанного выше тока у некоторых электродвигателей, разрыва замкнутого контура неработающей обмотки иногда не делают.
Выпускаются двухобмоточные трехскоростные двигатели , имеющие синхронные скорости вращения 1000/1500/3000 и 750/1500/3000 об/мин, и четырехскоростные двигатели, имеющие 500/750/1000/1500 об/мин. Двухскоростные двигатели имеют шесть, трехскоростные — девять и четырехскоростные — 12 выводов к переключателю полюсов.
Следует заметить, что существуют схемы двухскоростных двигателей, которые при одной обмотке позволяют получить скорости вращения, отношение которых не равно 1:2. Такие электродвигатели обеспечивают синхронные скорости вращения 750/3000, 1000/1500, 1000/3000 об/мин.
Путем использования специальных схем одной обмотки можно получить также три и четыре различных числа пар полюсов. Такие однообмоточные многоскоростные электродвигатели отличаются значительно меньшими габаритными размерами, чем двухобмоточные двигатели с теми же параметрами, что весьма важно для станкостроения.
Кроме того, у однообмоточных электродвигателей несколько выше энергетические показатели и меньше трудоемкость изготовления. Недостатком однообмоточных многоскоростных электродвигателей является наличие большего числа проводов, вводимых к переключателю.
Сложность переключателя определяется, однако, не столько числом выведенных наружу проводов, сколько числом одновременно осуществляемых переключений. В связи с этим были разработаны схемы, позволяющие при наличии одной обмотки получить три и четыре скорости при относительно простых переключателях.
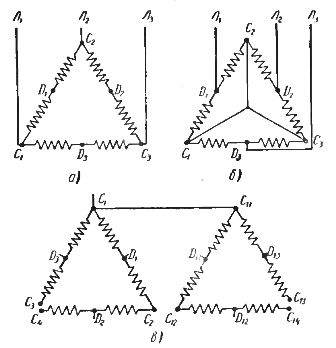
Рис. 2. Схемы переключения полюсов асинхронного двигателя.
Такие электродвигатели выпускаются станкостроительной промышленностью при синхронных скоростях 1000/1500/3000, 750/1500/3000, 150/1000/1500, 750/1000/1500/3000, 500/750/1000/1500 об/мин.
Вращающий момент асинхронного двигателя может быть выражен известной формулой

где Iг — ток в цепи ротора; Ф — магнитный поток двигателя; ?2— угол сдвига фаз между векторами тока и э. д. с. ротора.

Рис. 3. Трехфазный многоскоростной электродвигатель с короткозамкнутым ротором.
Рассмотрим эту формулу применительно к вопросам регулирования скорости асинхронного двигателя.
Наибольшая продолжительно допустимая сила тока в роторе определяется допустимым нагревом и, следовательно, является примерно постоянной величиной. Если регулирование скорости ведется с постоянным магнитным потоком, то при всех скоростях двигателя наибольший длительно допустимый момент будет также величиной постоянной. Такое регулирование скорости называется регулированием с постоянным моментом.
Регулирование скорости изменением сопротивления в цепи ротора является регулированием с постоянным предельно допустимым моментом, так как магнитный поток машины при регулировании не изменяется.
Предельно допустимая полезная мощность на валу электродвигателя при меньшей скорости вращения (и, следовательно, большем числе полюсов) определяется выражением

где Iф1 — фазовый ток, предельно допустимый по условиям нагрева; Uф1 — фазовое напряжение статора при большем числе полюсов.

Предельно допустимая полезная мощность на валу электродвигателя при большей скорости вращения (и меньшем числе полюсов) где Iф2 — фазовый ток, предельно допустимый по условиям нагрева при второй схеме включения статора; Uф2— фазовое напряжение в этом случае.
При переходе от соединения треугольником к соединению звездой фазовое напряжение уменьшается в ?2 раза. Таким образом, при переключении со схемы а на схему б (рис. 2) получим отношение мощностей

Иначе говоря, мощность на меньшей скорости составляет 0,86 мощности на большей скорости вращения ротора. Имея в виду относительно небольшое изменение наибольшей длительно допустимой мощности на обеих скоростях, такое регулирование условно именуют регулированием при постоянной мощности.
Если при последовательном соединении половин каждой фазы воспользоваться соединением звездой, а затем переключить на соединение параллельной звездой (рис. 2, б), то получим
Таким образом, в данном случае имеет место регулирование скорости с постоянным моментом. У металлорежущих станков приводы главного движения требуют регулирования скорости с постоянной мощностью, а приводы подач — регулирования скорости с постоянным моментом.
Приведенные выше выкладки соотношения мощностей при высшей и низшей скоростях носят приближенный характер. Не была, например, учтена возможность повышения нагрузки на высоких скоростях вследствие белее интенсивного охлаждения обмоток; принятое равенство также очень приближенно. Так, для двигателя 4А имеем


В результате соотношение мощностей для этого двигателя P1/P2 = 0,71. Такие же примерно соотношения имеют место и для других двухскоростных двигателей.
Новые однообмоточные многоскоростные электродвигатели в зависимости от схемы переключения допускают регулирование скорости с постоянной мощностью и с постоянным моментом.
Небольшое число ступеней регулирования, которое может быть получено у асинхронных двигателей с переключением полюсов, обычно позволяет использовать такие двигатели на станках только при наличии специально сконструированных коробок скоростей.