Синхронный двигатель с постоянными магнитами
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


- Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Электрооборудование установок гидромеханизации — Схемы управления синхронными двигателями
Содержание материала
Процессы управления синхронным двигателем сводятся к автоматизированному пуску и регулированию тока возбуждения в рабочем режиме. Особенности пуска синхронного двигателя, рассмотренные в § 5-4, обусловливают определенные способы соединения возбудителя с обмоткой полюсов ротора (см. рис. 5-30).
Ниже рассматриваются схемы с глухоподключенным возбудителем и с сопротивлением в цепи возбуждения.
Полная схема управления синхронным двигателем с глухоподключенным возбудителем
Рассматриваемая схема (рис. 9-16) имеет в гидромеханизации повсеместное распространение. Она применяется для управления синхронными двигателями в приводе грунтовых насосов любых установок (плавучие и стационарные землесосные снаряды, перекачивающие станции), а также крупных водяных насосов.
В качестве возбудителя используется генератор постоянного тока, якорь которого механически связан с ротором двигателя СД1.
1 Часто применяются также возбудители с собственным двигателем привода небольшой мощности.
Пуск двигателя осуществляется в асинхронном режиме (см. § 5-4). На подсинхронной скорости двигатель втягивается в синхронизм и переходит к режиму работы на постоянной скорости (синхронный режим) .
Двигатель подключается к шинам 6000 В через разъединитель Р и масляный выключатель МВ. В данной схеме используется пружинный привод масляного выключателя, в частности типа ПП-67, с заводом пружин посредством коллекторного двигателя ДП (см. § 3-5, рис. 3-12).
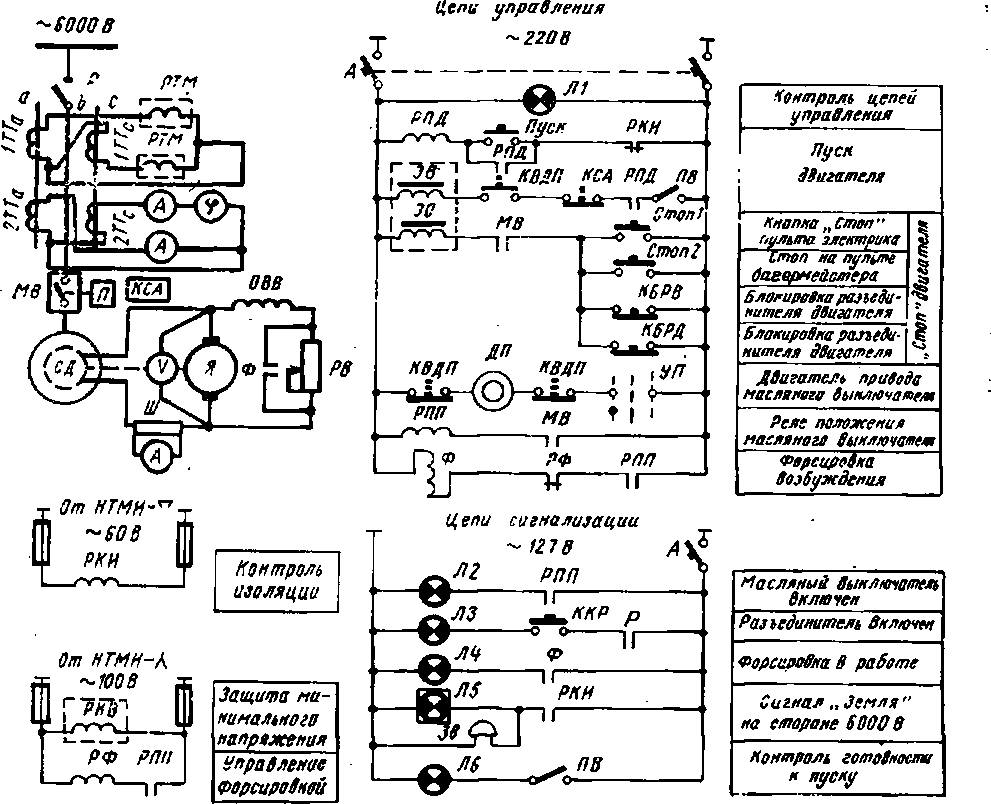
Рис. 9-16. Схема управления, зашиты и сигнализации синхронного двигателя 6000 В с глухо подключенным возбудителем.
Пунктиром обведены катушки, установленные на приводе выключателя.
Схема привода МВ работает следующим образом.
Для приведения привода в состояние готовности к включению масляного выключателя переключателем УП замыкается цепь двигателя ДП, который при своем вращении через механическую передачу растягивает пружины привода («заводит» привод).
В крайнем положении растянутых пружин двигатель отключается размыкающими контактами конечного выключателя КВДП; в этом же положении замыкаются замыкающие контакты в цепи катушки ЭВ. При сжатых пружинах (после срабатывания привода) контакты КВДЛ соответственно изменяют свое положение.
Если переключатель УП остается в положении, когда его контакты замкнуты (левое положение рукоятки), то размыкающие контакты КВДП обеспечивают автоматический завод привода и состояние его готовности для следующего включения МВ.
Для включения масляного выключателя следует нажать кнопку Пуск. При этом замыкается цепь реле пуска двигателя РПД, которое одной парой замыкающих контактов шунтирует кнопку, а другой — замыкает цепь электромагнита включения привода ЭВ. В цепи катушки ЭВ предварительно должен быть замкнут пакетный выключатель ПВ. Включение катушки ЭВ носит импульсный характер; при срабатывании привода на включение размыкающие блок-контакты МВ (контакты КСА) размыкаются, прерывая цепь катушки ЭВ. Одновременно замыкаются замыкающие контакты МВ в цепях катушки отключения ЭО и реле положения привода РПП.
Отключение масляного выключателя производится при замыкании цепи катушки отключения ЭО нажатием на одну из кнопок Стоп. Отключение произойдет также при ошибочной попытке размыкания одного из разъединителей —ввода (на схеме не показан; см. рис. 12-12) или двигателя (разъединитель Р). При воздействии на приводы этих разъединителей для их отключения замыкаются контакты блокировочных: кнопок КБРВ или КБРД.
В схеме применена форсировка возбуждения, выполненная следующим образом.
При снижении напряжения пропорционально уменьшается момент на валу двигателя. Для поддержания момента при снижении напряжения следует увеличить ток возбуждения.
При полном напряжении на шинах 6000 В магнитный поток катушки реле минимального напряжения РФ, питающейся через трансформатор напряжения типа НТМИ (от вторичной обмотки, соединенной в звезду; см. § 3-6), достаточен для того, чтобы якорь реле находился в притянутом состоянии (как указано выше, замыкающие контакты РПП при включенном МВ замкнуты).
В этом состоянии размыкающие контакты реле РФ в цепи катушки контактора форсировки Ф разомкнуты, контактор Ф отключен и реостат возбуждения РВ введен в цепь обмотки возбуждения ОВВ возбудителя. При снижении напряжения на обмотках трансформатора НТМИ якорь реле РФ отпадает и его размыкающие контакты замыкают цепь контактора Ф. Контакты последнего, закрываясь, шунтируют реостат РВ, форсируя возбуждение. При восстановлении напряжения реостат вновь вводится в цепь возбуждения.
В рабочем режиме реостат служит для регулирования тока возбуждения и, следовательно, коэффициента мощности двигателя.
Схема также предусматривает следующие виды защит.
- Защита максимального тока, осуществляемая с помощью электромагнитных реле РТМ, встроенных в привод (см. § 13-3), катушки которых подключены к обмоткам трансформаторов тока 1TTа и 1ΤΤс (см. § 3-6). При достижении тока, проходящего через катушки, равного величине уставки, якорь реле втягивается и, воздействуя на расцепитель привода, отключает масляный выключатель МВ.
- Защита минимального напряжения, обеспечивающая отключение масляного выключателя при понижении напряжения ниже уставки реле РНВ, подключенного к обмотке трансформатора НТМИ. Реле встроено в привод выключателя и воздействует на расцепитель при отпадании якоря (см. § 13-3).
- Контроль изоляции, осуществляемый с помощью реле напряжения РКП, включенного в обмотку трансформатора НТМИ, соединенную в открытый треугольник (см. § 3-6). При нарушении изоляции в одной из фаз на стороне напряжения 6000 В на зажимах открытого треугольника возникает напряжение, достаточное для срабатывания реле. При этом размыкающие контакты реле РКИ прерывают цепь катушки реле РПЦ, предотвращая возможность включения масляного выключателя. Одновременно замыкающие контакты РКИ включают световое табло Л5 и звонок Зв звуковой сигнализации.
Действие цепей сигнализации и измерения (амперметры, вольтметры и фазометр) усматривается из схемы рис. 9-16 и в особом пояснении не нуждается.
Схемы управления возбуждением синхронного двигателя с сопротивлением в цепи возбудителя
Управление приводом выключателя, защита и сигнализация аналогичны рассмотренному для двигателя с глухоподключенным возбудителем. Ниже поясняется лишь управление возбуждением двигателя с помощью магнитной станции для цепей ротора, выпускаемой электротехнической промышленностью и поставляемой в комплекте с синхронными двигателями.
В схеме, представленной на рис. 9-17, обмотка возбуждения двигателя СД при пуске замкнута на сопротивление СГ, которое служит
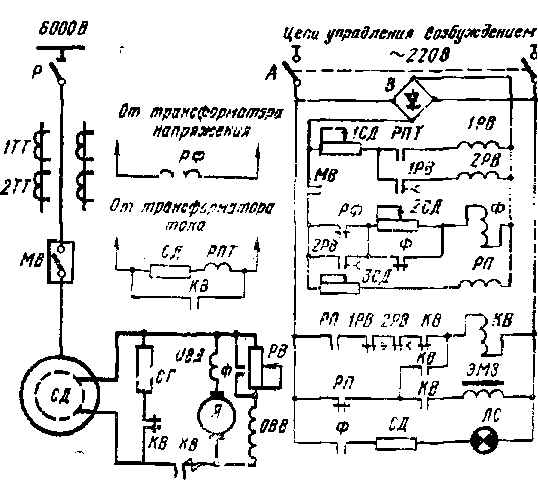
Рис. 9-17. Схема управления возбуждением синхронного двигателя с сопротивлением в цепи возбуждения.
для увеличения сопротивления цепи возбуждения и снижения пускового пульсирующего момента (см. рис. 5-29). Кроме того, оно выполняет функцию разрядного сопротивления, предотвращая пробой изоляции обмотки возбуждения приостановке двигателя, когда возбудитель отключается контактами кв.
Схема работает следующим образом.
При включении выключателя МВ начинается процесс асинхронного пуска двигателя СД; возникающий толчок тока приводит к срабатыванию реле РПТ, замыкающего своими контактами цепь реле времени 1PB и через замыкающие контакты последнего — цепь реле 2РВ. При этом открываются размыкающие контакты 1РВ и 2РВ в цепи катушки
контактора КВ.
Одновременно при включении выключателя замыкается его блок- контакт МВ и получает питание катушка промежуточного реле РП. Закрываясь в цепи катушки контактора КВ, замыкающие контакты реле РП подготавливают его к включению. Цепь этой катушки остается, однако, разомкнутой до тех пор, пока открыты размыкающие контакты реле 1РВ и 2РВ.
Конструкция контактора КВ предусматривает самоотключение его катушки после срабатывания размыкающими контактами КВ, включенными последовательно с ней. При этом якорь контактора в притянутом положении удерживается механической защелкой. Последующее освобождение якоря и размыкание контактов производятся воздействием на защелку электромагнитом ЭМЗ.
По мере разгона двигателя пусковой ток снижается и при определенном его значении якорь реле РПТ отпадает и замыкающие контакты PUT разрывают цепь катушки реле 1PB; контакты 1РВ затем прерывают цепь катушки реле 2РВ. Отпадание реле 1PB и 2РВ влечет за собой замыкание с выдержкой времени размыкающих контактов 1РВ и 2РВ в цепи катушки контактора КВ. Контактор КВ включается, в результате чего в схеме происходят следующие изменения. Катушка КВ отключается размыкающими блок-контактами КВ в ее цепи, но якорь контактора удерживается в притянутом состоянии механической защелкой. Обмотка возбуждения двигателя СД замыкается на якорь возбудителя замыкающими главными контактами КВ и отключается от сопротивления СГ размыкающими контактами. В цепях управления закрываются контакты КВ, подготавливая операцию последующего отключения двигателя. Одновременно замыкающие блок-контакты КВ шунтируют катушку реле РПТ в цепи трансформатора тока.
При отключении двигателя выключателем МВ блок-контакты последнего, разрываясь, прекращают питание катушки реле РП. При отпадании якоря реле РП его размыкающие контакты, закрываясь, подают питание одновременно на катушку контактора КВ и электромагнита защелки ЭМЗ. Якорь контактора КВ притягивается для облегчения освобождения защелки, а электромагнит ЭМЗ, воздействуя на нее, расцепляет механизм удержания якоря КВ, и он отпадает, возвращая аппараты схемы в исходное состояние.
Как и в схеме с глухоподключенным возбудителем (рис. 9-16), в данной схеме предусмотрена форсировка возбуждения, контролируемая реле напряжения РФ, катушка которого включена на зажимы вторичной обмотки трансформатора напряжения. При понижении напряжения якорь реле РФ отпадает и его размыкающие контакты замыкаются в цепи контактора форсировки Ф. Срабатывание последнего обеспечивается, кроме того, через замыкающие контакты реле времени 2РВ, катушка которого включается, как показано выше, при замыкании реле РПТ. Таким образом, действие форсировки возбуждения дублируется по току нагрузки двигателя.
Для удержания контактора во включенном состоянии требуется меньший ток, нежели для его включения из разомкнутого состояния.
Поэтому питание катушки после включения осуществляется через добавочное сопротивление 2СД 1 , которое вводится размыкающими контактами Ф при включении контактора.
Рассмотренные схемы пуска предусматривают включение двигателя на полное напряжение сети.
Асинхронный пуск синхронных двигателей большой мощности сопровождается значительным броском тока и соответствующим ему понижением напряжения питающей сети. В случае необходимости ограничения бросков тока пуск синхронных двигателей в известных случаях производится при пониженном напряжении. Для этого статор двигателя подключают к сети через реактор или автотрансформатор, шунтируемые затем, по завершении переходного процесса пуска, особыми выключателями.
В связи с этим различают схемы легкого и тяжелого пуска синхронных двигателей.
Первый случай относится к пуску ненагруженных двигателей или двигателей с небольшим моментом нагрузки на валу. При легком пуске втягивание двигателя в синхронизм и подача возбуждения происходят при пониженном напряжении.
При тяжелом пуске подаче возбуждения предшествует переключение статора на полное напряжение.
Схемы пуска при пониженном напряжении в установках гидромеханизации не применяются и поэтому более подробно здесь рассмотрены не будут.
1 Такое добавочное сопротивление, служащее для уменьшения тока катушек при продолжительном включении, называется экономическим.