Следящая обратная связь в двигателях в схемах на микроконтроллере
Управление двигателями является стандартной задачей, поручаемой MK. Однако формирование управляющих сигналов без слежения за результатом таит определённую опасность, особенно при высоких скоростях вращения и большой мощности на валу. Нужна обратная связь, чтобы вовремя среагировать на аварийную ситуацию или адаптировать скорость вращения двигателя к изменяющейся обстановке. Обратная связь предполагает комплексное использование входов и выходов MK по принципу «работать в паре сподручнее».

На Рис. 3.1, a…e показаны схемы подключения двигателей к MK с использованием обратной связи.

Рис. 3.1. Схемы подключения двигателей к MK с использованием обратной связи (начало):
а) кнопка SB1 служит для запуска двигателя M1 при наличии напряжения + 12…+25 В. Если напряжение не подано, то на входе MK постоянно присутствует НИЗКИЙ уровень. Элементы R2, R3, VD1 снижают высокое напряжение и стабилизируют его. Конструктивно кнопка SB1 может располагаться, например, на ручке микродрели. Программно можно осуществить триггерное включение/выключение при нажатии/отпускании кнопки SB1\
б) MK через цепочку R1, C2 определяет моменты перехода переменного напряжения 220 В через «цифровой» порог +2…+3 В. Резистор Л/должен иметь большое сопротивление. Импульс с выхода MK формируется так, чтобы тиристор VS1 открывался вблизи точки перехода сетевого напряжения через нуль, в связи с чем резко уменьшаются коммутационные помехи;

Рис. 3.1. Схемы подключения двигателей к MK c использованием обратной связи
в) датчик остановки двигателя вентилятора. Со среднего вывода двигателя Ml снимаются импульсы, имеющие частоту следования, пропорциональную скорости вращения вала. При остановке вентилятора или значительном снижении скорости оборотов, MK выставляет на выходе НИЗКИЙ уровень и через транзисторы VT1, ГГ2отключаетдвигатель от питания;
г) дискретная регулировка частоты вращения вала трёхфазного двигателя Ml производится число-импульсным способом. Это означает, что MK анализирует 255 полуволн сетевого напряжения 220 В/50 Гц (элементы R4, R1, HL1) и определяет, в какие из полуволн необходимо подавать импульсы запуска двигателя Ml (элементы R2, R3, VS1). При штатной скорости вращения 1380 об/мин пропуск одной из 255 полуволн приводит к замедлению скорости на 5 об/мин. Светодиод HL1 ограничивает напряжение на входе АЦП MK. По яркости его свечения можно в первом приближении судить о частоте вращения двигателя Ml;
д) транзисторы VT1, VT4 и VT2, VT3 работают противофазно, образуя мост H-Bridge. При превышении порогового тока, протекающего через двигатель Ml, срабатывает аналоговый компаратор MK и управляющие импульсы снимаются со всех его четырёх выходов (транзисторы VT1, ГТЗ запираются ВЫСОКИМИ, а транзисторы VT2, VT4— НИЗКИМИ уровнями);

Рис. 3.1. Схемы подключения двигателей к MK c использованием обратной связи
e) на валу двигателя M1 закрепляется диск с прорезями, который перекрывает световой поток между излучателем и фотоприёмником оптопары VU1. MK анализирует параметры импульсов с выхода оптопары VU1 и корректирует соответствующим образом скважность сигналов ШИМ, подаваемых через транзистор VT1 на двигатель ML В программе используются два контура обратной связи — слежение за фазой (R3, C1) и слежение за частотой импульсов (R4, C2).
Источник: Рюмик, С. М., 1000 и одна микроконтроллерная схема. Вып. 2 / С. М. Рюмик. — М.:ЛР Додэка-ХХ1, 2011. — 400 с.: ил. + CD. — (Серия «Программируемые системы»).
Схемы управления с обратной связью
Почти во всех системах управления, используемых в силовой электронике, применяется отрицательная обратная связь (ОС). В этой главе представлены основы аналогового анализа таких систем, так как, по мнению автора, это дает больше пользы для понимания их особенностей функционирования, чем новейшие теории управления, использующие цифровую технику.
На Рис. 4.i приведена схема простейшего устройства управления с отрицательной обратной связью.

Рис. 4.1. Система с обратной связью
Сигнал управления поступает на суммирующее устройство и сравнивается с сигналом обратной связи, имеющим противоположную полярность. Разностный сигнал поступает на вход усилителя, формирующего выходной сигнал системы, из которого получается также сигнал обратной связи. Передаточные характеристики усилителя и цепи обратной связи являются частотно-зависимыми и описываются функциями G(s) и H(s) соответственно.
Характеристики этой системы могут быть выведены из уравнений, связывающих выходной и входной сигналы. Эти уравнения следующие:
4. eo = G(s) x [ec — eo x H(s)];
5. eo/ec = G(s)/[1 + G(s) x H(s)]=A,
где eo/ec является коэффициентом усиления системы с замкнутой цепью обратной связи, зависящим от частоты.
Если разомкнуть цепь обратной связи, то коэффициент передачи от входа усилителя до выхода цепи обратной связи получится равным А = G(s) x H(s). Системы, подобные приведенной на Рис. 4.i, могут быть проанализированы на устойчивость и другие свойства путем исследования частотной характеристики усилителя с разомкнутой цепью обратной связи. Для большинства приложений оказывается достаточным асимптотическое приближение.
На Рис. 4.2 приведена истинная амплитудно-частотная характеристика (АЧХ) ЯС-цепи, состоящей из последовательно включенных резистора номиналом 1 мОм и конденсатора емкостью 3.3 мкФ, а также ее асимптотическое приближение, известное под названием «диаграмма (график) Боде». Отметим, что масштаб по обеим осям графика логарифмический.
Размерность по оси ординат указана в децибелах (дБ), которые рассчитываются по формуле 20 logio(vo/vi), где vo и vi — выходное и входное напряжения соответственно. Это могут быть также входной и выходной токи, или напряжения, пропорциональные токам и полученные с помощью токового трансформатора или резистора-шунта. Асимптотический подход удобен своей простотой, а максимальная погрешность его составляет 3 дБ в точке излома. Точка излома в радианах за секунду просто обратно пропорциональна постоянной времени ЯС-цепи в секундах. На Рис. 4.3 приведены несколько диаграмм Боде для различных элементов схем.
АЧХ системы из нескольких последовательно включенных элементов может быть определена путем простого сложения их диаграмм Боде. На Рис. 4.4 показано, как из элементов с различными диаграммами Боде, отмеченными цифрами 1 и 2, при их включении последовательно получается суммарная диаграмма, отмеченная цифрой 3.

Рис. 4.2. Амплитудно-частотная характеристика RC-цепи

Рис. 4.3. Диаграммы Боде некоторых электронных схем

Рис. 4.4. Сложение диаграмм Боде, когда элементы включены последовательно
Временной отклик системы с замкнутой цепь обратной связи может быть выведен из ее АЧХ с разомкнутой цепью обратной связи. Наибольшее влияние на временной отклик оказывает наклон диаграммы Боде при пересечении ею линии единичного усиления (0 дБ) и значение усиления на частотах в 10 раз меньше и больше этой точки. На Рис. 4.5 приведены несколько диаграмм Боде с соответствующими им нормализованными временными откликами. Размерность по оси абсцисс для диаграмм Боде дана в рад/с, а на графиках временных откликов — в секундах.
Вверху слева линия усиления пересекает ось 0 дБ с наклоном 40 дБ на декаду. Временной отклик в этом случае чрезвычайно нестабилен и система склонна к отказу. Вверху справа линия усиления приближается к оси 0 дБ под углом 20 дБ на декаду, а затем приобретает наклон 40 дБ на декаду. Система в этом случае стабильна, но склонна к перерегулированию. Кроме того, недостаток усиления на высоких частотах приводит к ухудшению быстродействия.
Кривые справа внизу также демонстрируют перерегулирование, однако из-за более высокого усиления на высоких частотах быстродействие оказывается лучше, чем в предыдущем случае. И наконец, внизу слева, при наклоне диаграммы Боде 20 дБ на декаду на всем ее протяжении, получается хорошее быстродействие в отсутствие перерегулирования. Диаграммы Боде полезны для понимания поведения и более сложных систем.

Рис. 4.5. Диаграммы Боде, F(s), и соответствующие им временные отклики, f(t)
Амплитудно-частотные характеристики являются только частью дела, другую часть представляют собой фазо-частотные характеристики (ФЧХ). График на Рис. 4.5, внизу слева, соответствует чистому интегратору, а его фазо-частотная характеристика имеет сдвиг (отставание) фазы на 90° независимо от частоты. График вверху слева соответствует двум последовательно включенным интеграторам, и фазовый сдвиг в этом случае составляет 180°. Причиной нестабильности здесь является то, что напряжение обратной связи не вычитается из входного сигнала, а прибавляется к нему. Обратная связь становится не отрицательной, а положительной, что способствует возбуждению в системе регенеративных колебаний.
Фильтр нижних частот, показанный на Рис. 4.3, внизу справа, имеет фазовый сдвиг вблизи точки излома диаграммы Боде, равный 45°, а при более высоких частотах фазовый сдвиг стремится к 90°. Фильтрация сигналов всегда сопровождается возникновением фазовых сдвигов. На Рис. 4.6 для ЯС-фильтра нижних частот приведена истинная фазовая характеристика и ее асимптотическое приближение.

Рис. 4.6. Фазо-частотнаяхарактеристика RC-цепи
Фильтры нижних частот являются не единственными источниками создания отставания фазы. Любые схемы задержки времени также дают вклад в отставание фазы. В мостовых преобразователях напряжения на тиристорах, в частности, тиристор не может немедленно отреагировать на сигнал его управления, даже если на его аноде присутствует положительное напряжение. Если сигнал управления внезапно и резко уменьшится, то временная задержка может составить 11 мс, что соответствует при частоте 60 Гц фазовому сдвигу 240°, если предыдущий тиристор был включен. При небольшой задержке сигнала управления в 1.4 мс фазовый сдвиг составляет 30° (Рис. 4.7).
Временные задержки также возникают в системах выборки данных. Если из выходного сигнала системы периодически делается выборка для цепи обратной связи, то возникает задержка, в среднем равная половине периода выборок. В сложных системах задержки в разных узлах могут складываться между собой, что является источником нестабильности.

Рис. 4.7. Фазо-частотпая характеристика цепи задержки па 1.4 мс
Пропорциональные, интегрирующие и дифференцирующие звенья регулирования
Множество промышленных устройств управления для оптимизации параметров регулирования используют пропорциональные, интегрирующие или дифференцирующие звенья. Базовая схема системы управления приведена на Рис. 4.8. В ней используются три канала, с возможностью регулировки коэффициента передачи в каждом из них. Выходные сигналы этих каналов суммируются. Передаточная характеристика данной схемы может регулироваться в широких пределах. В системе с только пропорциональньш регулированием всегда имеет место ошибка, обратно пропорциональная коэффициенту усиления. Если добавить интегрирующее звено, ошибка в принципе может быть уменьшена до нуля. Выражение «в принципе» добавлено потому, что в любой системе всегда есть ограничения по точности. Дифференцирующее звено может быть использовано для ускорения отклика системы и компенсации задержек. Однако оно создает шумы, что требует ограничения доли сигнала с его выхода в общем выходном сигнале управления.

Рис. 4.8. Схема управления с пропорциональным, интегрирующим и дифференцирующим звеньями

Рис. 4.9. Схема управления двигателем постоянного тока с двумя петлями обратной
Вложенные петли управления
Многие системы управления требуют нескольких петель обратной связи для управления несколькими переменными. Примером является электродвигатель постоянного тока, схема управления которым должна включать быстродействующую петлю обратной связи для ограничения потребляемого тока и петлю управления напряжением для регулировки скорости. Управление напряжением не должно приводить к перегрузке по току, а должно обеспечивать протекание требуемого тока в пределах, устанавливаемых петлей ограничения тока. Безусловно, обе петли должны обладать стабильностью. На Рис. 4.9 приведена типовая схема подобного управляющего устройства. Цепь ограничения тока включает в себя резистор-шунт и изолирующий усилитель. АЧХ этой петли при использовании тиристоров в качестве исполнительных элементов должна бы иметь частоту единичного усиления порядка 1000рад/с, однако допустимо и 500рад/с, что не только легче выполнимо, но и устойчивее в работе. Если АЧХ петли обратной связи по току имеет частоту единичного усиления 500 рад/с, то для петли обратной связи по напряжению частота единичного усиления может быть выбрана в 10 раз меньше, например 50 рад/с, что обеспечит ее стабильность при работе с частотой сети электропитания и 50, и 60 Гц.
Источник: Сукер К. Силовая электроника. Руководство разработчика. — М.: Издательский дом «Додэка-ХХI, 2008. — 252 c.: ил. (Серия «Силовая электроника»).
Управление двигателями постоянного тока. Часть 1
Владимир Рентюк, Запорожье, Украина
В статье дается краткий обзор и анализ популярных схем, предназначенных для управления коллекторными двигателями постоянного тока, а также предлагаются оригинальные и малоизвестные схемотехнические решения
Электродвигатели являются, наверное, одним из самых массовых изделий электротехники. Как говорит нам всезнающая Википедия, электрический двигатель – электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую. Началом его истории можно считать открытие, которое сделал Майкл Фарадей в далеком 1821 году, установив возможность вращения проводника в магнитном поле. Но первый более-менее практический электродвигатель с вращающимся ротором ждал своего изобретения до 1834 года. Его во время работы в Кёнигсберге изобрел Мориц Герман фон Якоби, более известный у нас как Борис Семенович. Электродвигатели характеризуют два основных параметра – это скорость вращения вала (ротора) и момент вращения, развиваемый на валу. В общем плане оба этих параметра зависят от напряжения, подаваемого на двигатель и тока в его обмотках. В настоящее время имеется достаточно много разновидностей электродвигателей, и поскольку, как заметил наш известный литературный персонаж Козьма Прутков, нельзя объять необъятное, остановимся на рассмотрении особенностей управления двигателями постоянного тока (далее электродвигателями).
К двигателям постоянного тока относятся два типа – это привычные для нас коллекторные двигатели и бесколлекторные (шаговые) двигатели. В первых переменное магнитное поле, обеспечивающее вращение вала двигателя, образуется обмотками ротора, которые запитываются через щеточный коммутатор – коллектор. Оно и взаимодействует с постоянным магнитным полем статора, вращая ротор. Для работы таких двигателей внешние коммутаторы не требуются, их роль выполняет коллектор. Статор может быть изготовлен как из системы постоянных магнитов, так и из электромагнитов. Во втором типе электродвигателей обмотки образуют неподвижную часть двигателя (статор), а ротор сделан из постоянных магнитов. Здесь переменное магнитное поле образуется путем коммутации обмоток статора, которая выполняется внешней управляющей схемой. Шаговые двигатели («stepper motor» в английском написании) значительно дороже коллекторных. Это достаточно сложные устройства со своими специфическими особенностями. Их полное описание требует отдельной публикации и выходит за рамки данной статьи. Для получения более полной информации по двигателям этого типа и их схемам управления можно обратиться, например, к [1].
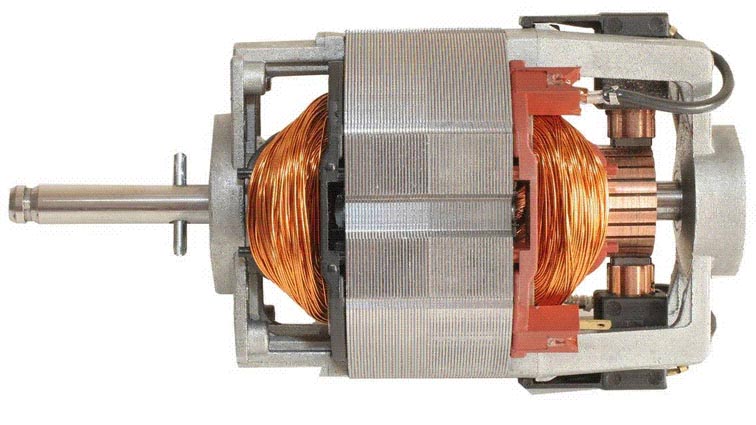
Коллекторные двигатели (Рисунок 1) более дешевы и, как правило, не требуют сложных систем управления. Для их функционирования достаточно подачи напряжения питания (выпрямленного, постоянного!). Проблемы начинают возникать, когда появляется необходимость в регулировке скорости вращения вала такого двигателя или в специальном режиме управления моментом вращения. Основных недостатков таких двигателей три – это малый момент на низких скоростях вращения (поэтому часто требуется редуктор, а это отражается на стоимости конструкции в целом), генерация высокого уровня электромагнитных и радиопомех (из-за скользящего контакта в коллекторе) и низкая надежность (точнее малый ресурс; причина в том же коллекторе). При использовании коллекторных двигателей необходимо учитывать, что ток потребления и скорость вращения их ротора зависят от нагрузки на валу. Коллекторные двигатели более универсальны и имеют более широкое распространение, особенно в недорогих устройствах, где определяющим фактором является цена.
| |||||
| Рисунок 1. | Коллекторный двигатель с редуктором (а) и типовая конструкция коллекторного двигателя (б). | ||||

Поскольку скорость вращения ротора коллекторного двигателя зависит, в первую очередь, от подаваемого на двигатель напряжения, то естественным является использование для его управления схем, имеющих возможность установки или регулировки выходного напряжения. Такими решениями, которые можно найти в Интернете, являются схемы на основе регулируемых стабилизаторов напряжения и, поскольку век дискретных стабилизаторов давно прошел, для этого целесообразно использовать недорогие интегральные компенсационные стабилизаторы, например, LM317 [2]. Возможные варианты такой схемы представлены на Рисунке 2.
| |||||
| Рисунок 2. | Схемы управления маломощным коллекторным двигателем на базе ИМС LM317. | ||||
Схема примитивная, но кажется очень удачной и, главное, недорогой. Посмотрим на нее с точки зрения инженера. Во-первых, можно ли ограничить момент вращения или ток двигателя? Это решается установкой дополнительного резистора. На Рисунке 2 он обозначен как RLIM. Его расчет имеется в спецификации, но он ухудшает характеристику схемы как стабилизатора напряжения (об этом будет ниже). Во-вторых, какой из вариантов управления скоростью лучше? Вариант на Рисунке 2а дает удобную линейную характеристику регулирования, поэтому он и более популярен. Вариант на Рисунке 2б имеет нелинейную характеристику. Но в первом случае при нарушении контакта в переменном резисторе мы получаем максимальную скорость, а во втором – минимальную. Что выбрать – зависит от конкретного применения. Теперь рассмотрим один пример для двигателя с типовыми параметрами: рабочее напряжение 12 В; максимальный рабочий ток 1 А. ИМС LM317, в зависимости от суффиксов, имеет максимальный выходной ток от 0.5 А до 1.5 А (см. спецификацию [2]; имеются аналогичные ИМС и с бóльшим током) и развитую защиту (от перегрузки и перегрева). С этой точки зрения для нашей задачи она подходит идеально. Проблемы скрываются, как всегда, в мелочах. Если двигатель будет выведен на максимальную мощность, что для нашего применения весьма реально, то на ИМС, даже при минимально допустимой разнице между входным напряжением VIN и выходным VOUT, равной 3 В, будет рассеиваться мощность не менее
Таким образом, нужен радиатор. Опять вопрос – на какую рассеиваемую мощность? На 3 Вт? А вот и нет. Если не полениться и рассчитать график нагрузки ИМС в зависимости от выходного напряжения (это легко выполнить в Excel), то мы получаем, что при наших условиях максимальная мощность на ИМС будет рассеиваться не при максимальном выходном напряжении регулятора, а при выходном напряжении равном 7.5 В (см. Рисунок 3), и она составит почти 5.0 Вт!
 | |
| Рисунок 3. | График зависимости мощности, рассеиваемой на ИМС регулятора, от выходного напряжения. |
Как видим, получается что-то уже не дешевое, но очень громоздкое. Так что такой подход годится только для маломощных двигателей с рабочим током не более 0.25 А. В этом случае мощность на регулирующей ИМС будет на уровне 1.2 Вт, что уже будет приемлемо.
Выход из положения – использовать для управления метод широтно-импульсной модуляции (ШИМ). Он, действительно, самый распространенный. Его суть – подача на двигатель промодулированных по длительности однополярных прямоугольных импульсов. Согласно теории сигналов, в структуре такой последовательности имеется постоянная составляющая, пропорциональная отношению τ/T, где: τ – длительность импульса, а T – период последовательности. Вот она-то и управляет скоростью двигателя, который выделяет ее как интегратор в этой системе. Поскольку выходной каскад регулятора на основе ШИМ работает в ключевом режиме он, как правило, не нуждается в больших радиаторах для отвода тепла, даже при относительно больших мощностях двигателя, и КПД такого регулятора несравненно выше предыдущего. В ряде случаев можно использовать понижающие или повышающие DC/DC-преобразователи, но они имеют ряд ограничений, например, по глубине регулировки выходного напряжения и минимальной нагрузке. Поэтому, как правило, чаще встречаются иные решения. «Классическое» схемное решение такого регулятора представлено на Рисунке 4 [3]. Оно использовано в качестве дросселя (регулятора) в профессиональной модели железной дороги.
 | |
| Рисунок 4. | «Классическая» схема управления коллекторным двигателем на основе ШИМ (согласно оригиналу [3]). |
На первом операционном усилителе собран генератор, на втором компаратор. На вход компаратора подается сигнал с конденсатора C1, а путем регулирования порога срабатывания формируется уже сигнал прямоугольной формы с нужным отношением τ/T (Рисунок 5).
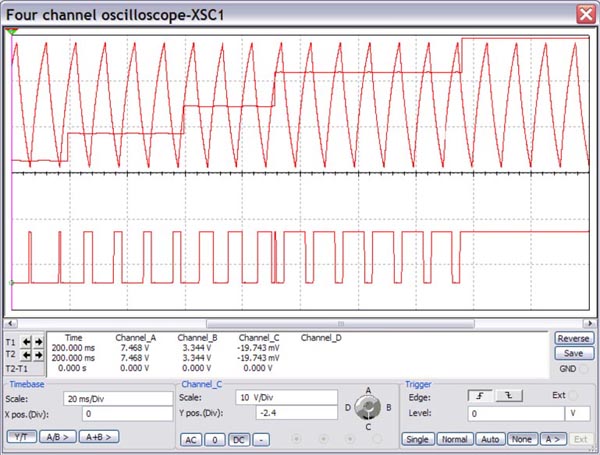 | |
| Рисунок 5. | Диаграмма управления коллекторным двигателем на основе ШИМ. Верхняя трасса – напряжение на конденсаторе С1; средняя (пересекает верхнюю) – сигнал управления (напряжение на движке резистора RV2); нижняя – напряжение на двигателе. |
Диапазон регулировки устанавливается подстроечными резисторами RV1 (быстрее) и RV3 (медленнее), а сама регулировка скорости осуществляется резистором RV2 (скорость). Обращаю внимание читателей, что в Интернете на русскоязычных форумах гуляет похожая схема с ошибками в номиналах делителя, задающего порог компаратора. Управление непосредственно двигателем осуществляется через ключ на мощном полевом транзисторе типа BUZ11 [4]. Особенности этого транзистора типа MOSFET – большой рабочий ток (30 А постоянного, и до 120 А импульсного), сверхмалое сопротивление открытого канала (40 мОм) и, следовательно, минимальная мощность потерь в открытом состоянии.
На что нужно в первую очередь обращать внимание при использовании таких схем? Во-первых, это исполнение цепи управления. Здесь в схеме (Рисунок 4) есть небольшая недоработка. Если со временем возникнут проблемы с подвижным контактом переменного резистора, мы получим полный почти мгновенный разгон двигателя. Это может вывести из строя наше устройство. Какое противоядие? Установить добавочный достаточно высокоомный резистор, например, 300 кОм с вывода 5 ИМС на общий провод. В этом случае при отказе регулятора двигатель будет остановлен.
Еще одна проблема таких регуляторов – это выходной каскад или драйвер двигателя. В подобных схемах он может быть выполнен как на полевых транзисторах, так и на биполярных; последние несравненно дешевле. Но и в первом и во втором варианте необходимо учитывать некоторые важные моменты. Для управления полевым транзистором типа MOSFET нужно обеспечить заряд и разряд его входной емкости, а она может составлять тысячи пикофарад. Если не использовать последовательный с затвором резистор (R6 на Рисунке 4) или его номинал будет слишком мал, то на относительно высоких частотах управления операционный усилитель может выйти из строя. Если же использовать R6 большого номинала, то транзистор будет дольше находиться в активной зоне своей передаточной характеристики и, следовательно, имеем рост потерь и нагрев ключа.
Еще одно замечание к схеме на Рисунке 4. Использование дополнительного диода D2 лишено смысла, так как в структуре транзистора BUZ11 уже имеется свой внутренний защитный быстродействующий диод с лучшими характеристиками, чем предлагаемый. Диод D1 также явно лишний, транзистор BUZ11 допускает подачу напряжения затвор-исток ± 20 В, да и переполюсовка в цепи управления при однополярном питании, как и напряжение выше 12 В, невозможны.
Если использовать биполярный транзистор, то возникает проблема формирования достаточного по величине базового тока. Как известно, для насыщения ключа на биполярном транзисторе ток его базы должен быть, по крайней мере, не менее 0.06 от тока нагрузки. Понятно, что операционный усилитель такой ток может не обеспечить. С этой целью в аналогичном, по сути, регуляторе, который используется, например, в популярном мини-гравере PT-5201 компании Pro’sKit, применен транзистор TIP125, представляющий собой схему Дарлингтона. Тут интересный момент. Эти мини-граверы иногда выходят из строя, но не из-за перегрева транзистора, как можно было бы предположить, а из-за перегрева ИМС LM358 (максимальная рабочая температура +70 °С) выходным транзистором (максимально допустимая температура +150 °С). В изделиях, которыми пользовался автор статьи, он был вплотную прижат к корпусу ИМС и посажен на клей, что недопустимо нагревало ИМС и почти блокировало теплоотвод. Если вам попалась такое исполнение, то лучше «отклеить» транзистор от ИМС и максимально отогнуть. За это know-how автор статьи был премирован компанией Pro’sKit набором инструментов. Как видите все нужно решать в комплексе – смотреть не только на схемотехнику, но и внимательно относится к конструкции регулятора в целом.
| |||||
| Рисунок 6. | Пример схем регуляторов с ШИМ и изменением опорной частоты. | ||||
Есть еще несколько интересных схем более простых ШИМ-регуляторов. Например, две схемы на одиночном операционном усилителе с драйвером опубликованы в [5] (Одна из них приведена на Рисунке 6а). Есть схемы и на базе популярного таймера серии 555 [6] (Рисунок 6б). Эти дешевые решения не должны вводить вас в заблуждение своей кажущейся простотой. Вспомним А.С. Пушкина: «Не гонялся бы ты, поп, за дешевизной». Или французов: «За каждое удовольствие нужно платить». Обе эти схемы формируют суррогатный сигнал ШИМ с изменением опорной частоты. Так схемы на ОУ из [5] меняют частоту управления во время регулирования от 170 Гц до 500 Гц, а схема на таймере – от 150 Гц до 1000 Гц, и ее диапазон регулировки (верхний диапазон) ограничен скважностью 9.5. Для некоторых применений это может быть недопустимо, так как на больших частотах двигатель может и не заработать, или не дать нужный момент вращения. Это происходит из-за того, что ток в обмотке двигателя, которая представляет собой индуктивность, устанавливается не мгновенно, а нарастает и спадает по экспоненте. Более корректные схемы на базе таймера и одиночного ОУ приведены на Рисунке 7.
| |||||
| Рисунок 7. | Схемы регуляторов с ШИМ без изменения опорной частоты. | ||||
Аналогичные по структуре регуляторы можно построить и на цифровых логических элементах, но они имеют малую нагрузочную способность и требуют отдельного источника питания, поэтому в данной статье не рассматриваются. Применение же таймера 555 интересно тем, что частота генератора, выполненного на его базе, практически не зависит от напряжения питания. Кроме того, большинство ныне выпускаемых зарубежных аналогов, выполненных по биполярной технологии, допускает выходной ток до 200 мА и более. То есть, они могут легко справиться и с емкостью затвора MOSFET и с мощными ключами на биполярных транзисторах. Близкий к таймеру 555 советско-российский аналог – это ИМС (КР)1006ВИ1. Максимальный выходной ток для КР1006ВИ1 и КМОП-версий таймера составляет 100 мА.