Способы торможения двигателей постоянного тока
Во многих случаях возникает необходимость затормозить ЭП. Торможение можно осуществить различными механическими и электромеханическими тормозами. Однако в качестве тормоза может быть использован и сам двигатель, поскольку любая электрическая машина обладает свойством обратимости, т.е. одна и та же электрическая машина может работать как в двигательном, так и в генераторном режиме. При смене двигательного режима на генераторный происходит изменение знака электромагнитного момента машины. При двигательном режиме работы знак момента совпадает со знаком (направлением) скорости вращения, а при генераторном – знак момента противоположен знаку скорости. Торможение самим двигателем повышает экономичность установки и упрощает ее. Существует три метода торможения электрических двигателей: динамическое, рекуперативное и торможение противовключением.
При динамическом торможении якорь электродвигателя отключают от питающей сети и замыкают на нагрузочное сопротивление (см. рис.20).
Машина переходит в генераторный режим работы и превращает запасенную кинетическую энергии вращающихся частей ЭП в электрическую энергию, которая выделяется на сопротивлении обмотки якоря Rя и сопротивлении Rд, включенным в цепь обмотки якоря, Rя+Rд.
Ток обмотки якоря в режиме динамического торможения протекает под воздействием ЭДС обмотки якоря. Поскольку ЭДС обмотки якоря имеет знак противоположный знаку напряжения, подаваемого на машину, ток якоря и электромагнитный момент изменяют свои знаки на противоположные. Момент становится тормозным, скорость двигателя уменьшается до нуля, двигатель останавливается.
На рис. 19 показана характеристика динамического торможения ДПТ НВ, уравнения которой получают из (68) и (69) при U = 0:
Из (73) и(74) видно, что характеристики Ω(I) и Ω(М) при U = 0 являются линейными. Схема динамического торможения, при котором ДПТ НВ имеет такую характеристику, приведена на рис. 20. Она может называться также схемой генератора, работающего на автономную нагрузку Rд.
Рис.20. Схема динамического торможения двигателя постоянного тока независимого возбуждения
ПрямаяВО на рис.19 (во втором квадранте) представляет собой механическую характеристику двигателя постоянного тока в режиме динамического торможения. Эффективность торможения по мере снижения скорости вращения падает, так как величина тормозного момента двигателя зависит от скорости. Динамическое торможение применяют в машинах с независимым электромагнитным или магнитоэлектрическим возбуждением.
В двигателях с параллельным и последовательным возбуждением обмотка возбуждения в период динамического торможения должна получать независимое питание от сети, поскольку при работе машины в режиме самовозбуждения уменьшение скорости нарушает условие самовозбуждения и тормозной момент становится недостаточным для эффективного торможения.
Расчет величины добавочного сопротивления при динамическом торможении приведен в разделе 4.5 (Регулирование тока и момента при пуске, торможении и реверсе), формула (89).
Рекуперативное торможениедвигателя осуществляют путем отдачи электрической энергии в сеть постоянного тока, питающую двигатель. Двигатель получает механическую энергию от рабочей машины и отдает ее (рекуперирует) в виде электроэнергии в сеть (см. рис. 21, в). На этом участке Ω > +Ω, поэтому ЭДС обмотки якоря больше напряжения сети, ток и момент изменяют свои направления на противоположные.
Из (65) можно получить выражение для тока якоря

Из приведенного выражения для тока якоря видно, что при Е>U ток якоря становится отрицательным, следовательно, и момент изменяет свой знак и становится тормозным. Механическая характеристика двигателя при рекуперативном торможении представлена на рис.19 прямой, представляющей собой продолжение характеристики двигательного режима (+ Ω Мп) во втором квадранте характеристики. При рекуперативном торможении кинетическая энергия вращающихся масс ЭП расходуется не на истирание механических тормозов, не на нагрев добавочных сопротивлений, как в случае динамического торможения, а отдается в сеть и может быть полезно использована другими приемниками электрической энергии. Поэтому рекуперативное торможение широко используется в ЭП, имеющих значительные инерционные массы. Двигатель с последовательным возбуждением, используемый в тяговых устройствах, нельзя непосредственно перевести в генераторный режим. Процесс рекуперации более просто осуществляется в машинах со смешанным возбуждением, благодаря чему они находят применение в тяговых ЭП.
Торможение противовключениемприменяют при необходимости быстрого торможения двигателя для производства реверса, т.е. разгону двигателя в направлении, противоположном начальному. Для этого полярность напряжения, приложенного к якорю, изменяют на противоположную. При таком переключении направления тока обмотки якоря и электромагнитного момента изменяются:
В начальный период в якорной цепи напряжение и ЭДС обмотки якоря будут действовать согласовано, создавая очень большой ток и тормозной момент.
Для ограничения толчков тока и момента при противовключении в якорную цепь вводят добавочное сопротивление Rд. В этом случае при расчете тока якоря следует принимать суммарное сопротивление цепи обмотки якоря R=Rя+ Rд. Величину Rд следует выбирать такой, чтобы ток Iпр не превышал (2–2,5)IN.
Режим противовключения наступает и в том случае, когда знак приложенного к якорю напряжения остается прежним, а изменяется направление вращения двигателя, т.е. Ω 14 151617>
Дата добавления: 2019-02-08 ; просмотров: 4424 ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Схемы автоматического управления пуском и торможением двигателей постоянного тока
 Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров. При этом изменяются ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
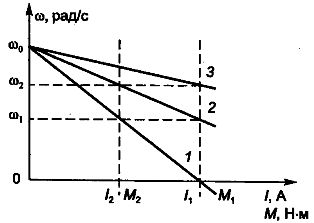
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
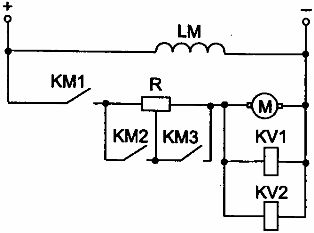
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
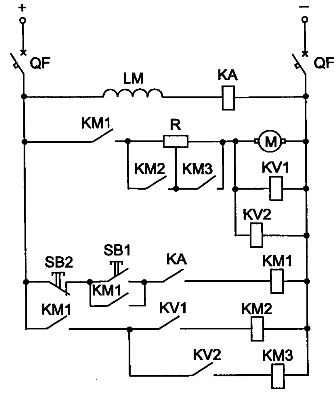
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока. Рассмотрим узел схемы пуска двигателя постоянного тока в функции тока. В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
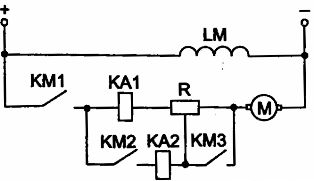
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя постоянного тока осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
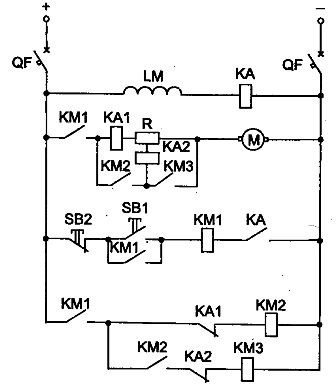
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
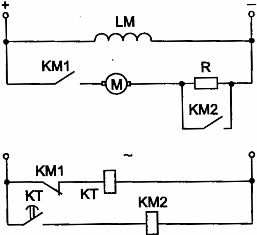
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1. КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания с резистором в цепи якоря.
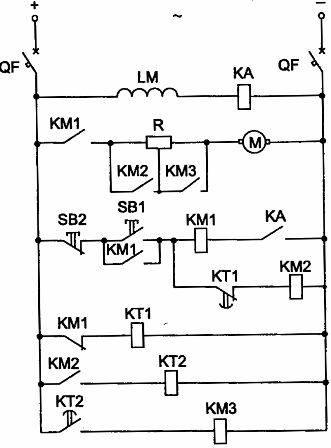
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Типовые узлы схем управления торможением двигателей постоянного тока
В системах автоматического управления двигателем постоянного тока применяется динамическое торможение, торможение противовключением и рекуперативное торможение.
При динамическом торможении необходимо обмотку якоря двигателя замкнуть на добавочное сопротивление, а обмотку возбуждения оставить под напряжением. Такое торможение можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
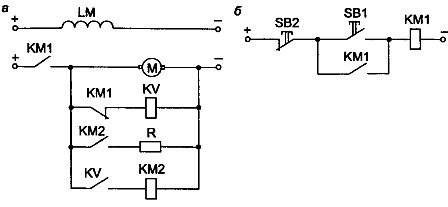
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
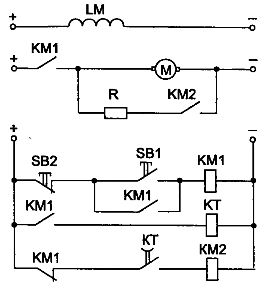
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10 ,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.