Схема управления АД с тиристорным преобразователем
7.4 Схема управления АД с тиристорным преобразователем
Тиристорный преобразователь с пассивными фильтрами (рис. 1) содержит три пары встречно-параллельно соединенных тиристоров, подключенных между питающей сетью и нагрузкой. Схема обладает структурной симметрией и осуществляет ступен-чатый переход от работы на пониженной частоте к частоте питающей сети, то есть к работе АД на естественной механической характеристике. Высокая надежность данного тиристорного преобразователя обусловлена схемотехнической простотой и естественной коммутацией вентилей.
В преобразователе используется квазичастотное управление (КЧУ), совмещающее особенности параметрического и частотного регулирования. Выходная частота преобразователя изменяется в соответствии с сигналами модуляции (прямоугольными, трапецеидальными, треугольными, синусоидальными и др.). Регулирование действующего значения выходного напряжения и тока производится за счет изменения угла включения тиристоров. Таким образом, осуществляется однополупериодное формирование напряжения статора пониженной частоты. В результате в выходном напряжении преобразователя наряду с основной (низкочастотной) гармонической составляющей присутствуют гармоники с частотой питающей сети. При работе тиристорного преобразователя на АД электромагнитный момент в режиме прерывистого тока имеет импульсный и, на отдельных интервалах, знакопеременный характер.
Для обеспечения непрерывности тока в обмотках статора АД в интервалах времени его отключения от питающей сети в тиристорном преобразователе используют энергию, накапливаемую в реактивных элементах фильтров, включенных на выходе тиристорного преобразователя. Продолжительность интервалов отключенного состояния при одноимпульсном формировании выходного напряжения и тока l0 і 0,5Тс, где Тс – период напряжения питающей сети, непрерывность протекания тока обеспечивается при периодическом переходном процессе с частотой свободных колебаний, равной или меньшей частоты сети w. Емкость конденсаторов фильтра:
С і 4LН/( )
)
где Lн – индуктивность нагрузки;
Rн – сопротивление нагрузки.
При увеличении угла включения тиристоров a в целях ограничения действующего значения фазного тока продолжительность интервалов отключенного состояния возрастает, и для обеспечения непрерывности тока в паузе (а также соответствия направления его протекания полярности сигнала модуляции) емкость С следует увеличить.
Индуктивности L1, L2, L3 не участвуют в формировании тока в интервалах отключенного состояния, однако включение дросcелей в продольную ветвь фильтра необходимо для ограничения бросков зарядного тока конденсаторов. Значение индуктивности выбирается из условия ограничения тока до допустимого для тиристоров значения или из условия обеспечения электромагнитной совместимости преобразователя с сетью.
В результате определены следующие параметры элементов фильтра в преобра-зователе: С1…С3 = 100 мкФ, L1…L3= 45 мГн. Емкость С рассчитывается по формуле С і 4LН/( ), выбранное значение соответствует минимально возможному при соблюдении условия непрерывности протекания тока в обмотках статора АД в интервалах откпюченного состояния.
), выбранное значение соответствует минимально возможному при соблюдении условия непрерывности протекания тока в обмотках статора АД в интервалах откпюченного состояния.
Экспериментально полученные механические характеристики АД 4А71А4УЗ (Рном = 0,55 кВт) при его работе с данным преобразователем показаны на рис. 2 (выходная частота МНПЧ fвых = fс/7, где fс – частота питающей сети; действующее значение фазного тока равно номинальному при угле включения тиристоров a = 900 эл.). Максимальное значение электромагнитного момента, развиваемого АД, в схеме без фильтра составило около 0,45 Мнои, с фильтром – до 0,8Мном. Пусковой момент увеличился более чем вдвое.

Рис. 1. Схема тиристорного преобразователя с LC-фильтрами
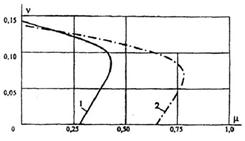
Рис. 2. Экспериментальные механические характеристики АД типа 4А71А4УЗ в двигательном режиме при квазичастотном регулировании (m = М / Мном):
1 – без фильтра, 2 – с фильтром
Функциональные схемы управления АД.

Т-образная схема замещения АД

Функциональная схема электропривода с АД и регулятором напряжения
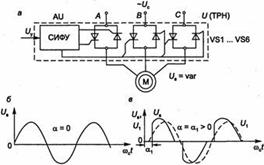
Схема тиристорного регулятора напряжения (а) и форма напряжения на статоре АД при различных значениях угла регулирования (б, в)

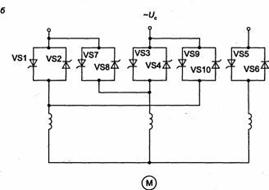
Функциональная схема замкнутой системы электропривода с АД и ТРН (а) и включение тиристоров для реверсивного управления (б)

Схема импульсного регулятора скорости АД на симмисторах в цепи ротора
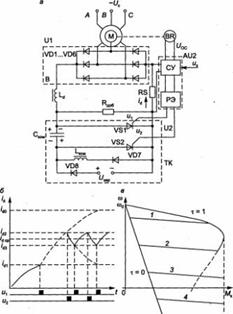
Импульсное регулирование в цепи ротора АД:
а – электрическая схема; б – временные диаграммы работы регулятора; в-механические характеристики в замкнутой системе
Для управления асинхронным двигателем могут использоваться тиристоры в сочетании с релейно-контакторными аппаратами. Тиристоры применяются в качестве силовых элементов и включаются в статорную цепь, релейно-контакторные аппараты включаются в цепь управления.
Используя тиристоры в качестве силовых коммутаторов, можно на статор при пуске подавать напряжение от нуля до номинального значения, ограничивать токи и моменты двигателя, осуществлять эффективное торможение либо шаговый режим работы. Такая схема приведена на рис. 1.33.
Силовая часть схемы состоит из группы тиристоров VS1…VS4, включенных встречно-параллельно в фазы Аи С. Между фазами Аи В включен короткозамыкающий тиристор VS5. Схема состоит из силовой цепи (рис. 1.33, а), цепи управления (рис. 1.33, б) и блока управления тиристорами – БУ (рис. 1.33, в).
Для пуска двигателя включается автоматический выключатель QF, нажимается кнопка SB1 «Пуск», в результате чего включаются контакторы КМ1 и КМ2. На управляющие электроды тиристоров VS1…VS4 подаются импульсы, сдвинутые на 60 е относительно питающего напряжения. К статору двигателя прикладывается пониженное напряжение, что приводит к снижению пускового тока и пускового момента.


Рис. 1.33. Тиристорное управление асинхронным двигателем с короткозамкнутым ротором
Размыкающий контакт КМ1 отключает реле KV1 с выдержкой времени, которая определяется резистором R7 и конденсатором С4. Размыкающими контактами реле KV1 шунтируются соответствующие резисторы в блоке управления, и на статор подается полное напряжение сети.
Для торможения нажимается кнопка SB2 «Стоп». Схема управления теряет питание, отключаются тиристоры VS1…VS4. Это приводит к тому, что на период торможения включается реле KV2 за счет энергии, запасенной конденсатором С5, и своими контактами включает тиристоры VS2. и VS5. Через фазы А и В статора проходит постоянный ток, который регулируется резисторами R1 и R3. Обеспечивается эффективное динамическое торможение.
Тиристорный регулятор двигателя
Тиристорный регулятор двигателя чтобы можно было изменять частоту вращения вала электродвигателя переменного тока, его подключают к тиристорному регулятору мощности. При этом электродвигатель включают либо в разрыв сетевого провода, либо после выпрямительного моста, питающего анодную цепь тринистора. Если в цепи нагрузки контакт не нарушается, тиристорный регулятор двигателя работает надежно. При подключении же коллекторного электродвигателя характер нагрузки изменяется — ток через нее течет как бы импульсами, в результате чего на коллекторных щетках наблюдается искрение. Тиристорный регулятор с такой нагрузкой работает неустойчиво.

Предлагаемый тиристорный регулятор мощности, специально предназначенный для управления коллекторным электродвигателем (электродрель, вентилятор и т. д.), имеет некоторые особенности. Во-первых, электродвигатель с силовым тиристором включены в одну из диагоналей выпрямительного моста, а на другую подано сетевое напряжение. Кроме того, этот тринистор управляется не короткими импульсами, как в традиционных устройствах, а более широкими, благодаря чему кратковременные отключения нагрузки, характерные для работающего коллекторного электродвигателя, не сказываются на стабильности работы регулятора.
На однопереходном транзисторе VT1 собран генератор коротких (доли миллисекунд) положительных импульсов, используемых для управления вспомогательным тиристором VS1. Питается генератор трапецеидальным напряжением, получаемым благодаря ограничению стабилитроном VD1 положительных полуволн синусоидального напряжения, следующих с частотой 100 Гц. С появлением каждой полуволны такого напряжения конденсатор С1 начинает заряжаться через цепь из резисторов R1—R3. Скорость зарядки конденсатора можно регулировать в некоторых пределах переменным резистором R1.
Как только напряжение на конденсаторе достигает порога открывания транзистора (он зависит от напряжения на базах транзистора и может регулироваться резисторами R4 и R5), на резисторе R5 появляется положительный импульс, поступающий затем на управляющий электрод тринистора VS1. Этот тринистор открывается и появляющийся на резисторе R6 более длительный (по сравнению с управляющим) импульс включает силовой тринистор VS2. Через него напряжение питания поступает на электродвигатель M1.
Момент открывания управляющего и силового тиристоров, а значит, мощность на нагрузке (иначе говоря, частоту вращения вала электродвигателя) регулируют переменным резистором R1. Поскольку в анодную цепь тринистора VS2 включена индуктивная нагрузка, может наблюдаться самопроизвольное открывание тринистора даже без сигнала на управляющем электроде. Чтобы избежать этого, параллельно обмотке возбуждения LB электродвигателя включен диод VD2.
Кроме указанного на схеме тиристорный регулятор двигателя, вспомогательный тиристор VS1 может быть другой маломощный, с допустимым прямым напряжением не менее 100 В; тринистор VS2 — КУ202М, КУ201К, КУ201Л; стабилитрон — с напряжением стабилизации 27…36 В; диод VD2 — любой выпрямительный с током не менее 0,3 А и обратным напряжением более 400 В; диоды VD3—VD6 — рассчитанные на выпрямленный ток более пускового тока электродвигателя и обратное напряжение не менее 400 В. Переменный резистор — СП-1, постоянные — МЛТ-0,25 (R2—R6) и МЛТ-2 (R7), конденсатор — КМ-6.
Детали тиристорный регулятор двигателя, кроме переменного резистора и диода VD2 (его устанавливают на электродвигателе), монтируют на плате (рис. 2) из фольгированного стеклотекстолита. В местах точек 1—3 на плате устанавливают пустотелые заклепки (они видны на рис. 3), к которым в дальнейшем припаивают проводники от переменного резистора и электродвигателя. Плату с переменным резистором размещают в подходящем по габаритам корпусе, на стенке которого можно установить розетку для подключения электродвигателя.

При налаживании тиристорный регулятор двигателя пользуются стробоскопом, измеряющим частоту вращения патрона электродрели либо крыльчатки вентилятора, или вольтметром переменного тока (желательно электромагнитной или электродинамической системы), подключенным параллельно нагрузке. Сначала резистор R2 ставят сопротивлением 30 кОм, а вместо R3 включают переменный резистор сопротивлением 220 ком. Перемещая движок резистора R1 из одного крайнего положения в другое, отмечают изменение напряжения на нагрузке. С помощью резистора R3 устанавливают диапазон регулировки этого напряжения 90…220 В, после чего измеряют получившееся сопротивление резистора R3 и впаивают в регулятор постоянный резистор такого же или возможно близкого номинала. Если при минимальном питающем напряжении электродвигатель работает неустойчиво, устанавливают резистор R2 с меньшим сопротивлением.
IV. Тиристорно-импульсная система управления (ТИСУ)

Общие сведения
Все современные технические решения образованы в начале второй половины XX века. Глупо считать учебники того времени устаревшими. Нельзя обойти благодарностью Шубенко В.А., Браславского И.Я. и остальной коллектив авторов, приготовивших для читателей столь замечательный материал.
Тиристоры так часто используются в регуляторах, что давно уже вытеснили транзисторы. Это объясняется высокими эксплуатационными и энергетическими характеристиками в роли управляемых вентилей. Основным преимуществом считается плавность настройки параметров. Хотя в ранних моделях и современных это реализуется принципиально иными путями. В результате привод характеризуется рядом положительных качеств:
- Повышенный КПД;
- Быстродействие;
- Резко очерченная форма управляющего сигнала;
- Дешевизна;
- Простота;
- Небольшие размеры.
Тиристорные регуляторы сегодня найдутся везде. В стиральных машинах изменяют плавно скорость вращения вала путём отсечки тока, в кухонных комбайнах по величине искрения подстраивают потребляемую мощность для стабилизации оборотов. Ранее тиристорные регуляторы применялись исключительно для асинхронных двигателей, преимущественно в паре с короткозамкнутым ротором. Сегодня принципиально новые технические решения намного раздвинули границы указанной отрасли. Уже в 60-е годы схемы применялись по двум направлениям:
- Настройка амплитуды питающего напряжения.
- Преобразование частоты питающего напряжения.
Первая методика считается универсальной и годится для абсолютного большинства двигателей. Вторая демонстрирует ограничения, на современном этапе в бытовых приборах встречается крайне редко, отвоевав сегмент среди промышленных применений. В домашнем оборудовании нынче применяется иная методика – отсечка тока (фазовый метод). Часть периода ключ пропускает переменное напряжение, в остальное время закрывается. Такой режим характеризуется минимальными затратами энергии при приемлемых характеристиках.
Типичная схема использования
В большинстве случаев схема применения тиристорного регулятора остаётся прежней, мало меняющейся с годами:
- Программные установки (ПУ) в виде кода закладываются в память арифметического устройства (АУ) электронного блока. В стиральной машине это самая дорогая часть. Настолько, что замена часто нецелесообразна.
- Тиристорный регулятор служит вводным устройством (ВУ), куда поступает управляющий сигнал.
- Изменённое напряжение воздействует на сервисный привод (СП), обмотки двигателя, коллектор и пр. Линия обратной связи показывает, что малая нестабильность компенсируется непосредственно без участия центрального процессора. Выше уже говорилось про величину искрения.
- Механизм (М) отрабатывает команды. На валу стоит централизованный датчик положения (ЦДП), по которому процессор понимает, что происходит в результате подачи команд. При необходимости алгоритм корректируется.
До тиристорных регуляторов использовались генераторы с непосредственным управлением либо ртутные выпрямители, с легко изменяемыми характеристиками. Но указанные устройства работали лишь в паре с коллекторными двигателями. Следовательно, простота, дешевизна, неприхотливость асинхронных оказывались не востребованы до появления тиристорных регуляторов.
Схема фазного управления двигателем
На рисунке представлена простейшая тиристорная схема для управления движением вала. Через ветки проходят импульсы обеих полярностей. При необходимости тиристор возможно запереть. В зависимости от совокупности управляющих сигналов изменяется порядок чередования фаз, что обеспечивает возможность реверсирования вала. Первая схема решает указанную задачу, вторая одновременно задаёт угол отсечки.
Безусловным плюсом такого технического решения считается возможность безболезненного отключения двигателя от сети на период торможения. Этим блокируется возврат энергии в сеть. Становится возможным режим противовключения. При открытых тиристорах 1 и 7 на одну обмотку приложены все напряжения. Как результат, образуется ощутимая постоянная составляющая. Продуцируемое ею магнитное поле служит интенсивному динамическому торможению вала, обусловленному потокосцеплением. Эта схема по-другому называется в литературе двухпульсным питанием в сети с изолированной нейтралью.
Интенсивность тормозящего магнитного поля регулируется введением в фазу А дополнительного резистора, не участвующего в работе, но только в останове. Одновременно тиристоры 9 и 10 полностью закрыты, току не остаётся другого пути. Это нужно, чтобы избежать перегрева и отдачи большого пика реактивной мощности в цепь. Управляющие цепи для упрощения на рисунке не показаны.
Тиристоры характеризуются конечным временем переключения, остаётся возможность создания ситуации, когда один ключ ещё работает, а второй уже включился. Что приведёт немедленно к межфазному короткому замыканию. В результате оба тиристора выйдут из строя из-за перегрева, ведь полупроводниковый p-n-переход теряет свойства необратимо в последнем случае. Кремниевые приборы предпочтительнее, выдерживают нагрев почти до 150 градусов Цельсия. Разумеется, силовые ключи снабжаются мощными радиаторами.
В этом плане режим отсечки тока, применяемый в современных схемах, смотрится намного более привлекательным, значительную часть периода ключ отдыхает. Если брать в рассмотрение компьютерные импульсные блоки питания, охлаждением занимается небольшой вентилятор. Без него размеры радиатора тиристорного ключа пришлось бы увеличить. В современных схемах повсеместно применяется широтно-импульсная модуляция, одним из методов реализации становится отсечка тока.
Чтобы тиристоры не срабатывали одновременно, полагается управляющие сигналы подавать с задержкой. Корректировка скорости на представленной схеме выполняется чередованием режимов питания и динамического торможения. Для коллекторных двигателей это излишне. Гораздо эффективнее менять угол отсечки для корректировки подаваемой мощности. Это одновременно сберегает потребляемую энергию, увеличивая КПД установки.
Непрерывный режим питания двигателя обеспечивается выработкой управляющих импульсов согласованно с переходом напряжения через нуль. Одна из возможных схем реализации упомянутой концепции представлена на рисунке. Её вариант показан для управления встречно включёнными тиристорами, чтобы избежать одновременного открытия ключей.
ТИРИСТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ
⇐ ПредыдущаяСтр 10 из 15Следующая ⇒
Основными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.
Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока.
Тиристорный электропривод переменного тока.Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема преобразователя (регулятора) переменного напряжения
на обмотках статора асинхронного двигателя с двумя встречно-параллельными тиристорами в каждой фазе. Устройство управления синхронно открывает тиристоры в порядке чередования фаз. Изменяя момент времени включения тиристоров (рис. 10.17), можно регулировать амплитуду напряжения основной гармоники. Выключение тиристоров осуществляется автоматически при изменении полярности напряжения соответствующей фазы. Такой режим называется
естественной коммутацией.
Искусственной коммутацией
называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить
тиристорное управление в цепи ротора
асинхронного двигателя (рис. 16.10). Рабочий тиристор
Т,
замыкающий цепь выпрямленного тока через резистор
r1
имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2и конденсатор
С.
Пусть первоначально рабочий тиристор Т
открыт, а вспомогательный
Твс
закрыт. В это время конденсатор
С
заряжается через резистор г2 так, как показано на рис. 16.10. Подадим теперь на управляющий электрод вспомогательного тиристора
Твс
отпирающий сигнал из устройства управления. Вспомогательный тиристор включится, и конденсатор начнет разряжаться через него и рабочий тиристор. Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r1и открытый вспомогательный тиристор.
Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке.
Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора.
Эквивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.
Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты
напряжения на обмотках статора. Для этой цели широко используются тиристорные
автономные инверторы,
т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз.
Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения Е
соединен со средней точкой первичной обмотки трансформатора. Когда тиристор T1 включается сигналом блока управления, а тиристор
Т2
закрыт, то источник постоянного напряжения
Е
подключается к левой половине первичной обмотки трансформатора. Ток этой части •первичной обмотки возбуждает магнитный поток в магнитопроводе трансформатора. При этом во вторичной обмотке трансформатора индуктируется ЭДС, а конденсатор
С
заряжается, как показано на рисунке.
Если управляющий сигнал включает тиристор Т2,
то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения
Е
подключается к правой половине первичной обмотки. В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке
ω2.
Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры.
Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18).
Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения Е
используется выпрямленное напряжение сети переменного тока. Если для этой цели, так же как и для инвертирования, использовать тиристоры, то выпрямленное напряжение можно регулировать в широких пределах (см. рис. 10.17). Это дает дополнительные возможности для управления асинхронным двигателем.
Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями.
В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель.
Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше.
Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока.
Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются.
Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10):
где α — угол запаздывания включения тиристоров.
Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2).
Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока.
Воспользуйтесь поиском по сайту:
Фазовое управление тиристорами
Регуляция скорости вращения при помощи тиристоров с внедрением цепи обратной связи обнаруживает ряд преимуществ. До введения подобных технических решений указанные задачи решали дроссели с работой в режиме насыщения, отличаясь рядом недостатков:
- Повышенный нижний порог срабатывания.
- Большие потери.
- Низкое быстродействие.
Схема управления напоминает показанную выше для обеспечения динамического торможения. Единственная разница в отсутствии резистора. Впрочем, выше уже делался намёк, что представленное техническое решение годится для создания нужных углов отсечки, что аналогично по смыслу. Исходя из опытных данных, определены требования к управляющим импульсам:
- Крутой фронт.
- Ширина не менее 60-ти градусов.
- Начальный момент включения в районе 20 градусов по фазе.
В схемах с глухозаземлённой нейтралью допустимо рассматривать каждую фазу по отдельности, словно работает обычный двигатель стиральной машины в сети 220 В. В цепях с изолированной нейтралью для правильной коммутации приходится учитывать фазовый угол каждой питающей линии и включать тиристоры попарно. С изменением задержки относительно времени прохождения напряжения через нуль варьируется передаваемая мощность. При угле сдвига фаз в 135 градусов вал переходит на минимальный режим, соответствующий холостому ходу (без нагрузки). Это верхний предел для систем фазной регулировки посредством тиристоров.
На схожем принципе действуют современные системы управления: пылесос, стиральная машина, кухонный комбайн и т.д. Минимальным углом отсечки для асинхронных двигателей считается 20 градусов. Согласно очевидным соображениям, сдвиг фаз схемы управления не должен зависеть от колебаний входного напряжения, реализуется за счёт вертикального принципа. Примеры конструкций на рисунке.
Конденсатор С1 служит для создания пилообразного напряжения. Начало импульсов синхронизировано с точкой перехода потенциала питания через нуль. Длина зуба достигает 160 градусов (почти половина периода), что и требуется, поскольку верхний порог регулирования составляет 135. Измерение текущего состояния системы производится по мостовой схеме. В нужный момент открывается ключ, формируя импульс, запускающий блокинг-генератор.
Трансформатор Тр1 питается от линии трёхфазной сети. Когда на обмотке минус, отпирается диод Д1, и питание идёт мимо конденсатора. Пилообразный импульс спадает. Заряд происходит при запертом диоде Д1. Момент открывания и, как следствие, форма зубца, регулируются подтягиванием напряжения Uy до нужного значения. Этим занимается схема управления, оценивающая одновременно скорость вращения вала. Блокинг-генератор формирует импульс заданной длины в требуемый момент времени, реализуя управление тиристорной схемой регулирования оборотов.
IV. Тиристорно-импульсная система управления (ТИСУ)
Скорость регулируют за счет плавного изменения среднего напряжения на двигателе, которое зависит от отношения длительности импульса
к длительности периода
(рис. 19.11, а). Машинист управляет тиристорами через специальную систему управления, вырабатывающую импульсы на запуск и отключение тиристоров.
Однотактный тиристорный прерыватель (рис. 19.11, б) работает следующим образом. При открытом зарядном тиристоре Д2 конденсатор С заряжается, через двигатель от источника питания с полярностью, указанной в скобках. По мере заряда конденсатора ток тиристора Д2 спадает до нуля и тиристор закрывается. Включение рабочего тиристора Д1 приводит к подаче напряжения аккумуляторной батареи к двигателю. В то же время конденсатор Сначинает перезаряжаться через открытый тиристор Д1, индуктивность Lи диод Д3;
при этом полярность напряжения на конденсаторе меняется на обратную. При включении Д2 конденсатор разряжается на тиристор Д1; ток разряда направлен встречно прямому току тиристора и последний закрывается. Ширина импульса напряжения, поступающего на двигатель, в данной схеме остается примерно постоянной, а среднее значение напряжения изменяется в зависимости от частоты импульсов запуска тиристора Д1
.
Ток нагрузки во время паузы поддерживается за счет запасенной двигателем энергии и протекает через диод обратного тока Д4
.
Пульсация тока, как правило, не превышает 10% от уставки тягового тока (рис. 19.11, в).
Рис. 19.11. Принципиальные схемы тиристорно-импульсного управления электровозом
олее широкое применение нашли двухтактные схемы ТИСУ, в которых каждый двигатель питается через свой тиристорный преобразователь, что значительно улучшает энергетический режим работы аккумуляторной батареи. При ТИСУ возможны те же режимы торможения, что и при РСУ, но применение тиристорного преобразователя позволяет осуществлять торможение в режиме стабилизации тормозного тока тяговых двигателей. Кроме того, ТИСУ дает возможность комбинировать известные способы торможения, например, электродинамическое с противовключением (рис. 19.11, г). При включенном тиристорном преобразователе ТП осуществляется торможение противовключением; при закрытых же тиристорах происходит электродинамическое торможение и ток двигателя протекает через диод Д и тормозной резистор R. Возможно электрическое торможение вплоть до полной остановки электровоза.
V. Дистанционное управление
Дистанционное управление применяют на рудных шахтах, на которых протягивание вагонеток при погрузке и разгрузке осуществляется электровозом. Простейшая схема изображена на рис. 19.12. Контактный провод орта изолирован от общешахтной контактной сети. У каждого пункта погрузки установлены кнопки П. Электровоз, въехав в орт, останавливается. Машинист устанавливает рукоятки контроллера в положение для движения в необходимом направлении, оставляет электровоз, идет к погрузочному люку и нажимает кнопку П, что вызывает замыкание контактора К и движение электровоза. Сейчас разрабатываются более совершенные с
Рис. 19.12. Принципиальная схема дистанционного управления электровозом:
1, 2 – контактный провод соответственно у въезда и выезда из орта; 3 – изоляционная вставка;
4 – контактный провод орта; 5 – якорь тягового двигателя; 6 – обмотка возбуждения двигателя; 7 – пусковое сопротивление
Оптимальное быстродействие
В системах регулирования скорости промышленного назначения не отмечается трудностей с разгоном, который легко реализуется при помощи системы реле и многоступенчатых реостатов. Когда начинается торможение, требуется вычислить момент начала подачи управляющих сигналов для снижения негативных эффектов.
Указанную задачу решает специальный блок, занимающийся оценкой текущего состояния системы. Опытным путём рассчитывается схема торможения, в управляющее устройство закладывается готовый алгоритм. При помощи датчиков определяется рассогласование между текущим состоянием и моментом начала торможения. Среди данных появляются величины – угловой путь вала до останова и прочие.
Обратная связь по скорости нелинейна и, как правило, не может быть рассчитана, данные об этой зависимости вводятся в память вычислителя. Как результат, согласно имеющейся нагрузке и динамическим показателям системы вырабатывается команда останова в нужный момент времени. Учитываются факторы:
- Отсутствие перегрева обмоток импульсом тока останова.
- Минимизация отдачи в сеть реактивной мощности.
- Продление срока эксплуатации установки.
- Отсутствие условий для создания аварий и механических перегрузок.
В ходе разработки системы управления тиристорным регулятором учитывается факт невосприимчивости асинхронного двигателя к воздействующим факторам на низких оборотах. В этом случае требуется минимальное рассогласование по скорости между полями ротора и статора, обеспечивающими возникновение токов Фуко и, как следствие, наличие потокосцепления. Это существенное ограничение асинхронных двигателей, из-за которого их применение в быту сводится к минимуму.
Система генератор – двигатель и тиристорный преобразователь – двигатель
В начале 50 – х и конце 40 – х годов начали появляться электронные системы управления. Это дало возможность значительно улучшить электропривод постоянного тока. Одними из первых появились газозаполненные выпрямители – тиратроны. Они стали использоваться в качестве возбудителей в электроприводе постоянного тока (зачастую в системах генератор — двигатель). Появление таких устройств позволило применять замкнутые системы управления вместо разомкнутых. Однофазные электронно — вакуумные выпрямители применялись в электроприводах мощностью до 10 кВт.
В конце 50 –х начали появляться полупроводниковые элементы такие как тиристоры и диоды. Сначала их изготавливали маломощными и область их применения ограничивалась регулированием возбуждения, где они потихоньку вытесняли электронно – вакуумные приборы благодаря надежности, долговечности, уменьшению габаритов и увеличению производительности.
Но техника не стояла на месте и мощность полупроводниковых элементов постепенно росла. Через некоторое время они начали вытеснять электронно – вакуумные приборы и с якорных цепей электроприводов. Сперва кремниевые диоды начали применяться в регулируемых электроприводах постоянного тока с реакторами насыщения. Ниже показана функциональная схема:
Такие системы более надежные чем системы генератор – двигатель и обеспечивают производительность повыше, чем система генератор – двигатель, но их стоимостные и габаритные показатели будут похуже системы генератор – двигатель.
В начале 1960 – х годов появились мощные тиристоры. После их появления машинные преобразователи потеряли всякий интерес проектировщиков, все их внимание сосредоточилось на проектировании электроприводов по системе тиристорный преобразователь – двигатель (ТП — Д). С тех пор и по сей день практически везде используют тиристорный электропривод. Тиристорный привод стал активно вытеснять систему генератор – двигатель, которая активно внедрялась в течении полувека. Структурная схема ТП – Д показана ниже:
Электропривод с системой ТП – Д имеет следующие преимущества над системой Г – Д (генератор двигатель):
- Тиристорный электропривод значительно снизил инерционность системы и повысил быстродействие работы установки, механизма;
- Он довольно безотказен в работе и прост в эксплуатации;
- КПД преобразователя не ниже 95%;
- Малая масса и габаритные размеры, что позволяет уменьшить площадь, необходимую для расположения устройства;
- Как правило имеет блочную компоновку тиристоров, что позволяет при выходе какого – то тиристора из строя быстро его заменить.
Но имея достоинства она также имеет и недостатки:
- На выходе преобразователя присутствуют пульсации тока и напряжения, что вызывает проблемы с коммутацией а также нагрев электродвигателя. Для улучшения энергетических показателей как правило требуется установка фильтров.
- Довольно низкий коэффициент мощности при использовании глубокого регулировании скорости вращения двигателя. В системе Г – Д если используют в качестве приводной синхронную машины, то регулирования ее потока позволит сохранить высокий коэффициент мощности.
- Перегрузочная способности ниже чем в Г – Д.
- Напряжения питающей сети искажается, что в большинстве случаев приводит к установке дополнительных фильтров для улучшения гармонического состава сети.
- При торможении электродвигателя при использовании Г – Д рекупирация энергии в сеть происходит естественно, то для ТП – Д необходимо применять специальные схемы включения, что ведет к дополнительным затратам.
Простое регулирование скорости электродвигателя вы можете посмотреть здесь: