Способы регулировки оборотов вращения асинхронных двигателей
Достаточно часто режим работы вспомогательного механизированного оборудования требует понижения штатных частот вращения. Добиться такого эффекта позволяет регулировка оборотов асинхронного двигателя. Как это сделать своими руками (расчет и сборку), используя стандартные схемы управления или самодельные устройства, попробуем разобраться далее.
Что такое асинхронный двигатель?
Электродвигатели переменного тока нашли довольно широкое применение в различных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они используются для превращения электрической энергии, которая поступает от сети, в механическую энергию вращающегося вала. Чаще всего используются именно асинхронные преобразователи переменного тока. В них частота вращения ротора и статора отличаются. Между этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют жесткий сердечник из электротехнической стали (наборного типа, из пластин), выступающий в роли магнитопровода, а также обмотку, которая укладывается в конструктивные пазы сердечника. Именно способ организации или укладки обмотки ротора является ключевым критерием классификации этих машин.
Двигатели с короткозамкнутым ротором (АДКР)
Здесь используется обмотка в виде алюминиевых, медных или латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих элементов зависит от мощности двигателя: для малых значений используют метод совместной отливки дисков и стержней, а для больших – раздельное изготовление с последующей сваркой между собой. Обмотка статора подключается с использованием схем «треугольника» или «звезды».

Двигатели с фазным ротором
К сети подключается трехфазная обмотка ротора, посредством контактных колец на основном валу и щеток. За основу принимается схема «звезда». На рисунке внизу представлена типичная конструкция такого двигателя.

Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
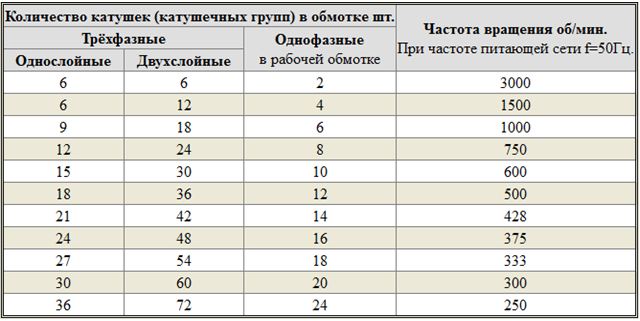
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Способы изменения оборотов двигателя
Регулировка оборотов любого трехфазного электродвигателя, используемого в подъемно-транспортной технике и оборудовании, позволяет добиться требуемых режимов работы точно и плавно, что далеко не всегда возможно, например, за счет механических редукторов. На практике используется семь основных методов коррекции скорости вращения, которые делятся на два ключевых направления:
- Изменение скорости магнитного поля в статоре. Достигается за счет частотного регулирования, переключения числа полюсных пар или коррекции напряжения. Следует добавить, что эти методы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения дополнительного сопротивления в электрическую цепь ротора, применения вентильного каскада или двойного питания. Используется для моделей с фазным ротором.
Наиболее востребованными методами являются регулирование напряжения и частоты (за счет применения преобразователей), а также изменение количества полюсных пар (реализуется путем организации дополнительной обмотки с возможностью переключения).
Типичные схемы регуляторов оборотов
На рынке сегодня есть широкий выбор регуляторов и частотных преобразователей для асинхронных двигателей. Тем не менее, для бытовых нужд подъемного или обрабатывающего оборудования вполне можно сделать расчет и сборку на микросхеме самодельного прибора на базе тиристоров или мощных транзисторов.
Ниже представлен пример схемы достаточно мощного регулятора для асинхронного двигателя. За счет чего можно добиться плавного контроля параметров его работы, снижения энергопотребления до 50%, расходов на техническое обслуживание.
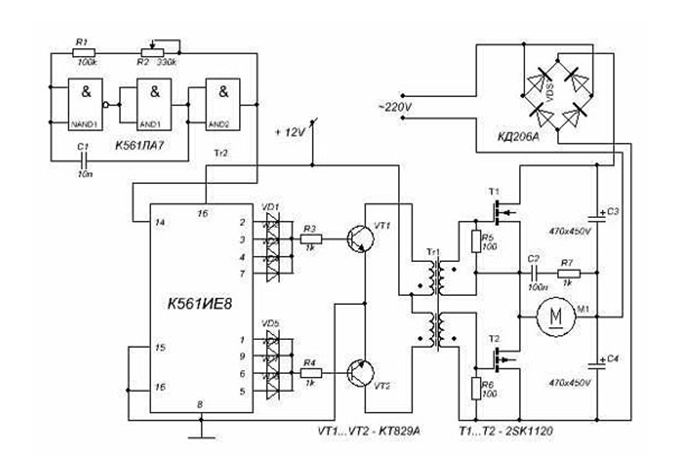
Данная схема является сложной. Для бытовых нужд ее можно значительно упростить, используя в качестве рабочего элемента симистор, например, ВТ138-600. В этом случае схема будет выглядеть следующим образом:
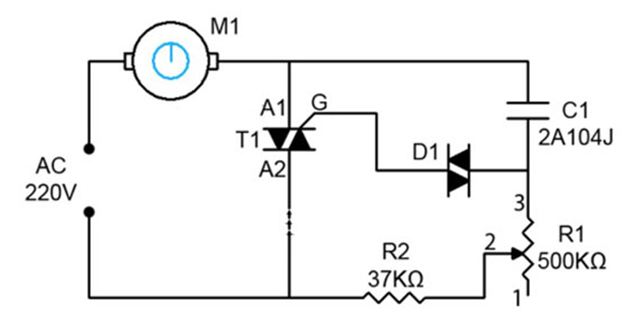
Обороты электродвигателя будут регулироваться за счет потенциометра, который определяет фазу входного импульса, открывающего симистор.
Как можно судить из информации, представленной выше, от оборотов асинхронного двигателя зависят не только параметры его работы, но и эффективность функционирования питаемого подъемного или обрабатывающего оборудования. В торговой сети сегодня можно приобрести самые разнообразные регуляторы, но также можно совершить расчет и собрать эффективное устройство своими руками.
Простейший регулятор оборотов электродвигателя своими руками
Изготавливая различные самоделки, приходится сталкиваться с рядом проблем и поиском их решений. Так и в случае с различными приспособлениями, которые имеют в своей конструкции коллекторный электродвигатель.
Очень часто нужно сделать так, чтобы двигатель имел регулируемые обороты. Для этих целей используется регулятор (контроллер) оборотов двигателя, который можно собрать своими руками.
Представленный ниже регулятор для электродвигателей позволяет не только обеспечить плавный пуск мотора и степень регулировки оборотов, но и защитить двигатель от перегрузок. Работать контроллер может не только от 220 Вольт, но и от пониженного напряжения, вплоть от 110 Вольт.
Характеристики самодельного контроллера
- Диапазон напряжений (110-240 Вольт);
- Возможность регулировки оборотов электродвигателя, от 9-99%;
- Нагрузка, до 2,5 кВт;
- Рабочая мощность, не более 300 Вт.
Самодельный регулятор оборотов для электродвигателя имеет низкий уровень шума, он позволяет осуществлять плавную стабилизацию оборотов и осуществлять мягкий пуск электродвигателя.
Ниже будет представлена схема регулятора оборотов для электродвигателя и принцип его работы.
Схема регулятора оборотов для электродвигателя
Чтобы собрать регулятор оборотов для двигателя потребуется генератор ШИМ импульсов и симистор для управления двигателем. Диод и резистор D1 и R1, позволяют снижать напряжение для питания двигателя, а конденсатор C1, призван обеспечивать фильтрацию тока на входе электроцепи.
Элементы P1, R5 и R3 — это делители напряжения с возможностью регулировки его значений. Резистор R2, который указан на схеме регулятора оборотов электродвигателя, позволяет синхронизировать внутренние блоки регулятора с основным симистором (ВТ139), на котором собственно и работает регулятор оборотов.
Ниже на рисунке можно увидеть наглядное расположение всех элементов регулятора оборотов для электродвигателей. Обязательно следует безопасно расположить элементы, так как работа регулятора осуществляется от опасного напряжения в 220 Вольт.
Мощность и нагрузка регулятора оборотов
К самодельному регулятору оборотов двигателя, сделанному по выше представленной схеме, можно подключить нагрузку не более 2 кВт. В случае увеличения нагрузки осуществляется замена главного симистора BT138/800. Если симистор устанавливается большего номинала, то его рекомендуется вынести за пределы общей платы, и обязательно установить на радиатор охлаждения, который можно сделать из куска алюминиевой полосы.
Примечательно то, что подобный регулятор можно использовать не только с электродвигателями, но и с лампами освещения. Таким образом, дёшево и сердито, можно собрать регулятор для яркости ламп освещения.
Подписывайтесь на мой канал в Дзен. Всем удачи, и мирного неба над головой!
Регулятор асинхронного двигателя
Всем здравствуйте. В сети, да и в общем часто возникает вопрос, как выполнить регулятор скорости вращения вентилятора для асинхронного двигателя? Известно, что мы можем легко регулировать скорость двигателя, используя симистор с фазовым управлением. И также, в литературе содержится информация о том, что асинхронный двигатель вращается со скоростью от нескольких процентов до 20% ниже, чем синхронная скорость.
Поэтому на вопрос о регулировании вращения асинхронного двигателя назревает ответ, инвертор. Однако это устройство является достаточно дорогостоящим, и смысл его выполнять собственными силами является спорным. Также считается, что использование фазового регулятора мощности с использованием симистора для этой цели невозможно. Однако это убеждение не совсем верно. Для некоторых двигателей и нагрузок использование симистора с фазовым управлением позволяет регулировать обороты в широком диапазоне.
Доступны интегральные микросхемы в таких простых фазовых регуляторах. Принимая во внимание ограничения, налагаемые системой фазового регулятора, мы можем очень просто создать нормально работающий регулятор скорости асинхронного двигателя. Давайте попробуем рассмотреть, что происходит после подключения асинхронного двигателя к типовому димеру, который обычно выполнен в соответствии с схемой, приведенной на рисунке.
Рассмотрим случай (рисунок графика), когда симистор включается под углом = 100 после того, как напряжение сети проходит через ноль. Угол проводимости будет около 150 градусов, поэтому симистор отключится под углом около 250 градусов в точке B. Остаточное положительное напряжение останется на конденсаторе C1, поскольку он не полностью разряжается через симистор.
В этот момент в системе запуска появляется отрицательное напряжение, которое сначала заряжает остаточное напряжение до С1, а затем запускает триод под углом около 350. Второе включение симистора произойдет при очень низком напряжении, и угол проводимости будет намного меньше, чем при первом. В следующем периоде условия аналогичны, поэтому значительная асимметрия активации симистора в отрицательном и положительном полупериодах сохраняется. Такая асимметрия недопустима в схеме управления двигателем, она может быть даже опасна из-за насыщения магнитной системы.
Четыре стандартных диода, два резистора и потенциометр были добавлены в стандартную схему димера, которая показана на рисунке.
В первом полупериоде система ведет себя так же, как схема из предыдущего рисунка. Однако после появления отрицательного напряжения остаточное положительное напряжение на С1 разряжается через диод D4 и резистор R2. Диод D3 предотвращает дальнейшую зарядку с отрицательным напряжением C1, даже после того, как положительное напряжение было разряжено. Элементы D1, D2 и R1 выполняют аналогичную функцию в положительном полупериоде. В результате работы схемы симметризации после нескольких периодов асимметрия устраняется.
Элементы R5 и C2 сглаживают выбросы напряжения, возникающие после отключения симистора в точке B. Без них быстрое увеличение напряжения на выходе может привести к включению симистора. Резистор R4 увеличивает время запускающего импульса. Без него это время будет определяться емкостью С1 и внутренними сопротивлениями элементов С1, Т1 и Т2 и будет слишком коротким, чтобы правильно запустить симистор.
Ток на индуктивной нагрузке после включения симистора медленно увеличивается, при слишком коротком импульсе он может не достигнуть значения IL «защелкивающегося» тока, и симистор отключится после импульса затвора. IL для типовых симисторов составляет от нескольких до нескольких десятков миллиампер.
Схема может быть собрана на печатной плате, показанной на рисунке в тексте.
Стоить обратить внимание на тот факт, что во время работы присутствует полное напряжение сети. Так что не переусердствуйте с миниатюризацией устройства. Не исключено, что регулятор будет работать в условиях повышенной влажности и, возможно, даже химически агрессивных. Поэтому расстояние между дорожками должно быть на значительном расстоянии, что влечет за собой размер платы.
В качестве R7 стоит использовать потенциометр с пластиковой осью или удлинителем с изолированной осью. В зависимости от мощности управляемого двигателя, симистор должен быть оснащен подходящим радиатором. Для защиты от протекания чрезмерного тока через не рабочий двигатель стоит выбрать сопротивление потенциометра, например, добавив параллельный резистор. Это может произойти, когда мы включаем потенциометр на низкую скорость. Однако, как правило, это не опасно для двигателя из-за низкого тока, протекающего в обмотках. Всем спасибо.