ОБОРУДОВАНИЕ
ТЕХНОЛОГИИ
РАЗРАБОТКИ
Блог технической поддержки моих разработок
Урок 73. ПИД-регулятор скорости вращения двигателя постоянного тока. Разработка аппаратной части.
Первый из серии уроков, посвященных разработке регулятора скорости вращения коллекторного двигателя постоянного тока. Рассматривается аппаратное подключение двигателя к плате Ардуино.
Игорь из Москвы заказал мне разработку контроллера- регулятора скорости вращения двигателя постоянного тока.
Это продолжение бесконечной разработки интеллектуального сверлильного станка. Сначала я написал для него общую управляющую программу. Затем мы создали электронный прицел для станка на OSD-генераторе. Пришла очередь до двигателя, который вращает шпиндель.
Используется коллекторный двигатель постоянного тока мощностью 500 Вт и номинальным напряжением 100 В. Необходимо задавать и стабилизировать его скорость вращения.
Тема показалась мне очень интересной, и я решил в качестве уроков описать последовательность своих действий по разработке контроллера двигателя. Тем более в интернете эта тема ограничивается теоретическими рассуждениями.
Должен получиться учебный материал на несколько разных тем:
- аппаратное подключение двигателя постоянного тока к Ардуино;
- измерение частоты и периода сигнала ;
- управление нагрузкой с помощью ШИМ;
- ПИД-регулятор;
- этапы разработки подобных устройств.
Кроме того, я надеюсь, что получится законченный аппаратно-программный блок – ПИД-регулятор скорости вращения двигателя постоянного тока. Его можно будет использовать в различных приложениях.
У Игоря используется достаточно мощный мотор 500 Вт, с номинальным напряжением питания 100 В. У меня такого двигателя нет. Поэтому я проведу разработку и испытания на компьютерном вентиляторе с номинальным напряжением 12 В. Не сомневаюсь, что все написанное и разработанное будет справедливо и для гораздо более мощных устройств. По крайней мере, Игорь проверит контроллер на 500 ваттном моторе.
Аппаратное подключение двигателя постоянного тока к Ардуино.
Существуют две основные задачи:
- Необходимо управлять двигателем, изменяя на нем напряжение, а значит и мощность. Т.е. нужно создать регулирующий элемент, с помощью которого регулятор будет изменять состояние двигателя, увеличивать или уменьшать его скорость вращения.
- Надо измерять скорость вращения двигателя, чтобы регулятор мог ее контролировать.
Сошлюсь на Урок 39, раздел ”Общие сведения о регуляторах”. Там написано, что необходимо выделить:
- регулируемый параметр – что мы регулируем;
- регулирующий элемент – с помощью чего мы регулируем.
Аппаратную часть этих компонентов регулятора и будем разрабатывать в этом уроке.
Подключение двигателя к ШИМ Arduino.
Естественно для управления двигателем будем использовать ШИМ. Это значительно упростит схему, повысит КПД. Практически, независимо от мощности и напряжения мотора, для управления им достаточно одного ключа. Конечно, передельно-допустимые параметры ключа должны соответствовать двигателю. Для моего двигателя-вентилятора я выбрал такие элементы.
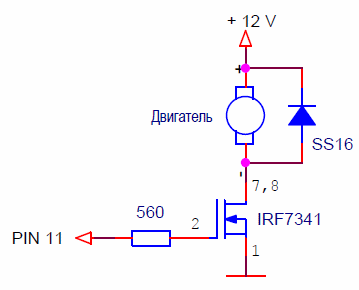
ШИМ с выхода Ардуино открывает и закрывает ключ, собранный на MOSFET-транзисторе. Можно, конечно, использовать и биполярный транзистор, но:
- полевым проще управлять;
- у него меньше падение напряжения в открытом состоянии, а значит он меньше греется;
- в отличие от биполярного транзистора, он работает на высоких частотах 100 кГц и выше.
Я выбрал MOSFET-транзистор IRF7341: N-канал, 55 В, 4 А. Кроме предельно-допустимых параметров необходимо учитывать то, что транзистор должен быть низкопороговым, т.е. открываться при небольшом напряжении (не более 5 В). Иначе необходимо использовать дополнительный элемент – драйвер.
Диод в схеме абсолютно необходим. Двигатель – это индуктивная нагрузка, а иногда и электрогенератор. Поэтому при закрытии транзистора на выводах двигателя могут возникать броски высокого напряжения. Они должны замыкаться через диод, чтобы не сжечь транзистор.
В некоторых подобных схемах используют низкочастотные выпрямительные диоды, например, 1N4007. Это допустимо только для дискретного управления двигателем: включить или выключить. При управлении с помощью ШИМ, особенно с высокой частотой, диод должен быть высокочастотным, лучше с барьером Шоттки.
При закрытом транзисторе диод находится в открытом состоянии, через него течет ток размагничивания обмотки двигателя. Затем транзистор открывается. А диод закрывается только через время восстановления обратного сопротивления. Даже у “быстрых” (FR307) диодов это время составляет 150-500 нс, у “супербыстрых” 35 нс, а у выпрямительных 1N4007 этот параметр не нормируется. Представьте себе, что при частоте ШИМ 100 кГц 100000 раз в секунду будет происходить короткое замыкание. Это приведет к жутким помехам, уменьшению КПД и нагреву диода и транзистора.
При высоком напряжении все значительно усугубиться. В общем рекомендации по выбору диода:
- Лучше всего диод Шоттки.
- Если высокое напряжение (более 150 В) не позволяет использовать диод Шоттки, то лучшим вариантом будет карбидокремиевые диоды Шоттки.
- Следующим приемлемым вариантом могут быть HEXFRED-диоды с ограничением обратного тока обратного восстановления;
- На крайний случай остаются супербыстрые и ультрабыстрые диоды.
У меня напряжение всего 12 В. Я выбрал диод Шоттки SS16.
Наверное, понятно, что меняя коэффициент заполнения ШИМ, мы будем изменять среднее напряжения на двигателе, я значит, и его мощность. Частоту ШИМ определим экспериментально.
Измерение скорости вращения.
Традиционным компонентом для измерения числа оборотов мотора служит датчик Холла. Это датчик, который показывает наличие магнитного поля, например, присутствие рядом с ним постоянного магнита. Для наших целей необходимы цифровые или дискретные датчики Холла. В отличие от аналоговых они срабатывают при превышении магнитным полем определенного порога и имеют гистерезис.
Конструкции измерителей скорости могут быть самыми разными. Можно закрепить на валу двигателя металлический диск с радиальными прорезями и использовать автомобильный датчик Холла.

Диск будет прерывать магнитное поле между датчиком Холла и постоянным магнитом. На прорезях магнитное поле будет проходить к датчику и таким образом, при вращении, будут формироваться импульсы.
Я поступил проще. Использовал дешевый, миниатюрный датчик Холла TLE4905L. В самых дорогих магазинах он стоит до 50 руб, а на АлиЭкспресс от 25 руб.
Это цифровой датчик Холла, настроенный на определенный порог магнитного поля. Он прекрасно срабатывает на расстоянии 8 мм от миниатюрного магнита диаметром 5 мм и толщиной 1 мм.
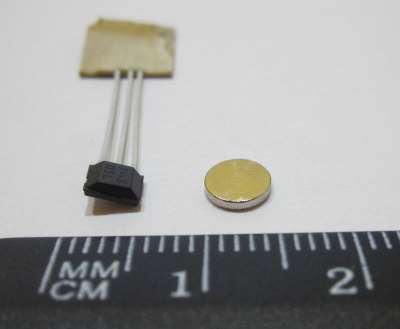
Конструкция измерителя очевидна. Я приклеил 2 магнита к диску вентилятора и над линией, по которой они двигаются при вращении, расположил датчик Холла.

Когда магниты проходят под датчиком, на его выходе формируются импульсы. Измерив частоту этих импульсов можно определить скорость вращения двигателя. На один оборот вырабатываются 2 импульса. Я использовал 2 магнита для того чтобы не нарушить балансировку вентилятора. Возможно, хватило бы и одного.
Как у датчика, так и у магнитов есть полярности. Поэтому перед тем, как устанавливать эти компоненты надо проверить в каком положении срабатывает датчик.
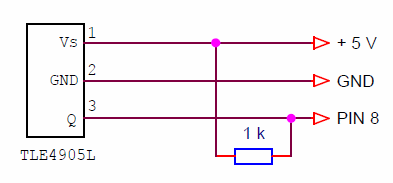
Датчик TLE4905L имеет выход с открытым коллектором. Он не формирует напряжение на выходе, а только замыкает или размыкает выход на землю. Со стороны приемника необходим внешний подтягивающий резистор.
Подключение датчика необходимо производить отдельными проводами. Все связи должны соединяться непосредственно на плате Ардуино. С точки зрения помехозащищенности это самое узкое место в системе.
Для задания скорости будем использовать переменный резистор. Подключим его к аналоговому входу платы Ардуино. Добавим еще сигнал включения/выключения двигателя и выход для тестовых импульсов. С помощью него будем проверять работу устройства без мотора.
С учетом всего вышесказанного окончательная схема контроллера-регулятора оборотов двигателя будет выглядеть так.
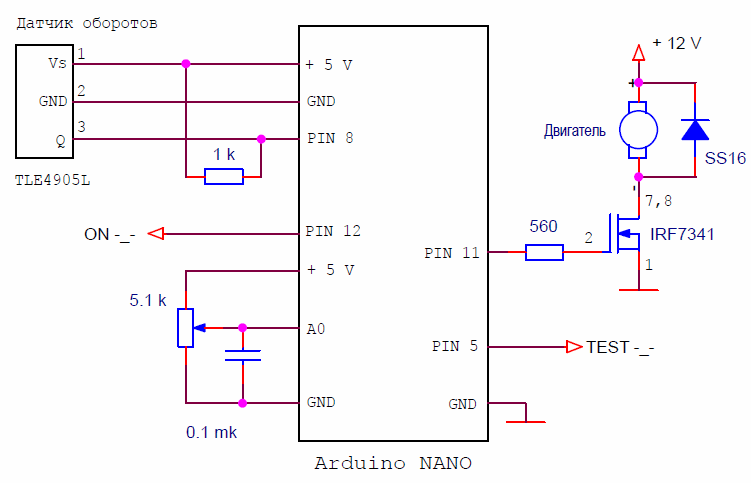
В реальных приложениях обороты можно задавать напряжением на аналоговом входе A0. Получится стандартный аналоговый интерфейс 0…5 В. Если необходим диапазон 0…10 В, то достаточно добавить резисторный делитель напряжения.
Состояние контроллера для отладки ПИД-регулятора будем передавать на компьютер через последовательный порт. Я разработаю программу верхнего уровня с регистрацией данных и отображением их в графическом виде. Регистратор значительно облегчает настройку любого ПИД-регулятора.
В следующем уроке начнем “оживлять” контроллер.
Управление щёточными моторами с Arduino
Как вы знаете, никакую нагрузку мощнее светодиода нельзя подключать к Ардуино напрямую, особенно моторчики. Ардуино, да и вообще любой микроконтроллер – логическое устройство, которое может давать только логические сигналы другим железкам, а те уже могут управлять нагрузкой. Кстати, урок по управлению мощной нагрузкой постоянного и переменного тока у меня тоже есть. “Драйвером” мотора могут быть разные железки, рассмотрим некоторые из них.
При помощи обычного реле можно просто включать и выключать мотор по команде digitalWrite(пин, состояние) , прямо как светодиод:

При помощи двойного модуля реле (или просто двух реле) можно включать мотор в одну или другую сторону, а также выключать:

Купить модуль реле можно на Aliexpress.
Мосфет
Полевой транзистор, он же мосфет, позволяет управлять скорость вращения мотора при помощи ШИМ сигнала. При использовании мосфета обязательно нужно ставить диод, иначе индуктивный выброс с мотора очень быстро убьёт транзистор. Скорость мотора можно задавать при помощи ардуиновской analogWrite(пин, скорость) .

Вместо “голого” мосфета можно использовать готовый китайский модуль:

Купить мосфет модуль можно на Aliexpress.
Реле и мосфет
Если объединить реле и мосфет – получим весьма колхозную, но рабочую схему управления скоростью и направлением мотора:

Специальный драйвер
Лучше всего управлять мотором при помощи специального драйвера, они бывают разных форм и размеров и рассчитаны на разное напряжение и ток, но управляются практически одинаково. Рассмотрим основные драйверы с китайского рынка:
| Драйвер | Vmot | Ток (пик) | Стоимость | Aliexpress |
| L298N | 4-50V | 1A (2A) | 100р | Купить |
| MX1508 | 2-9.6V | 1.5A (2.5A) | 20р | Купить |
| TA6586 | 3-14V | 5A (7A) | 100р (чип 30р) | Купить, купить, купить чип |
| L9110S | 2.5-12V | 0.8A (1.5A) | 50р | Купить |
| TB6612 | 4.5-13.5V | 1.2A (3A) | 80р | Купить |
| BTS7960 | 5.5-27V | 10A (43A) | 300р | Купить |
| Большой | 3-36V | 10A (30A) | 700р | Купить |
Остальные драйверы смотри у меня вот тут. Схемы подключения и таблицы управления:








Пины направления управляются при помощи digitalWrite(pin, value) , а PWM – analogWrite(pin, value) . Управление драйвером по двум пинам может быть двух вариантов:
Моторы переменного тока
Мотором переменного тока (220V от розетки) можно управлять при помощи диммера на симисторе, как в уроке про управление нагрузкой.
Библиотеки
У меня есть удобная библиотека для управления мотором – GyverMotor, документацию можно почитать вот здесь. Особенности библиотеки:
- Контроль скорости и направления вращения
- Работа с ШИМ любого разрешения
- Программный deadtime
- Отрицательные скорости
- Поддержка всех типов драйверов
- Плавный пуск и изменение скорости
- Режим “минимальная скважность”
Помехи и защита от них
Индуктивный выброс напряжения
Мотор – это индуктивная нагрузка, которая в момент отключения создаёт индуктивные выбросы. У мотора есть щетки, которые являются источником искр и помех за счёт той же самой индуктивности катушки. Сам мотор потребляет энергию не очень равномерно, что может стать причиной помех по линии питания, а пусковой ток мотора так вообще сильно больше рабочего тока, что гарантированно просадит слабое питание при запуске. Все четыре источника помех могут приводить к различным глюкам в работе устройства вплоть до срабатывания кнопок на цифровых пинах, наведения помех на аналоговых пинах, внезапного зависания и даже перезагрузки микроконтроллера или других железок в сборе устройства.
Отсечь индуктивный выброс с мотора можно при помощи самого обычного диода, чем мощнее мотор, тем мощнее нужен диод, то есть на более высокое напряжение и ток. Диод ставится встречно параллельно мотору, и чем ближе к корпусу, тем лучше. Точно таким же образом рекомендуется поступать с электромагнитными клапанами, соленоидами, электромагнитами и вообще любыми другими катушками. Логично, что диод нужно ставить только в том случае, если мотор или катушка управляется в одну сторону. Важные моменты:
- При работе с драйвером и управлением в обе стороны диод ставить не нужно и даже нельзя!
- При управлении ШИМ сигналом рекомендуется ставить быстродействующие диоды (например серии 1N49xx ) или диоды Шоттки (например серии 1N58xx).
- Максимальный ток диода должен быть больше или равен максимальному току мотора.
- Защитный диод, принимающий на себя обратный выброс ЭДС самоиндукции, также называется шунтирующим диодом, снаббером, flyback диодом.
- В природе существуют мосфеты со встроенным защитным диодом. Этот диод является отдельным элементом и такой мосфет обычно имеет нестандартный корпус, читайте документацию на конкретный транзистор.
- Диод, который показан на схематическом изображении мосфета, не является защитным диодом: это слабый и медленный “паразитный” диод, образованный при производстве транзистора. Он не защитит мосфет от выброса, нужно обязательно ставить внешний!
Помехи от щёток
Искрящиеся щетки мотора, особенно старого и разбитого, являются сильным источником электромагнитных помех, и здесь проблема решается установкой керамических конденсаторов с ёмкостью 0.1-1 мкФ на выводы мотора. Такие же конденсаторы можно поставить между каждым выводом и металлическим корпусом, это ещё сильнее погасит помехи. Для пайки к корпусу нужно использовать мощный паяльник и активный флюс, чтобы залудиться и припаяться как можно быстрее, не перегревая мотор. 
Помехи по питанию, просадка
Мотор потребляет ток не очень равномерно, особенно во время разгона или в условиях переменной нагрузки на вал, что проявляется в виде просадок напряжения по питанию всей схемы. Беды с питанием решаются установкой ёмких электролитических конденсаторов по питанию, логично что ставить их нужно максимально близко к драйверу, то есть до драйвера. Напряжение должно быть выше чем напряжение питания, а ёмкость уже подбирается по факту. Начать можно с 470 мкф и повышать, пока не станет хорошо.
Разделение питания
Если описанные выше способы не помогают – остаётся только одно: разделение питания. Отдельный малошумящий хороший источник на МК и сенсоры/модули, и отдельный – для силовой части, в том числе мотора. Иногда ради стабильности работы приходится вводить отдельный БП или отдельный аккумулятор для надёжности функционирования устройства.
Экранирование
В отдельных случаях критичными являются даже наводки от питающих проводов моторов, особенно при управлении ШИМ мощными моторами и управлении мощными шаговиками в станках. Такие наводки могут создавать сильные помехи для работающих рядом чувствительных электронных компонентов, на аналоговые цепи, наводить помехи на линии измерения АЦП и конечно же на радиосвязь. Защититься от таких помех можно при помощи экранирования силовых проводов: экранированные силовые провода не всегда удаётся купить, поэтому достаточно обмотать обычные провода фольгой и подключить экран на GND питания силовой части. Этот трюк часто используют RC моделисты, летающие по FPV.