Панкратов Сергей
Учим регулятор бесколлекторного мотора реверсу.

При необходимости в регуляторе с реверсом ( на авто, лодку) не обязательно приобретать специальный регулятор.
Можно приобрести и дешевый коптерный и обучить его.
На Хоббикинге периодически в продаже бывает регулятор, то по 2 то по 1 доллару.
https://hobbyking.com/en_us/dys-blhe. tion-2-4s.html
Его и буду использовать для примера.
Этот же регулятор можно найти в магазинах в термоусадке и с напаянными проводами, но уже дороже.
Еще необходим программатор, вариантов их много но более логичным и дешевым вариантом будет приобретение Arduino nano.
Ее можно превратить в различные программаторы или множество других применений.
Один из лотов-
https://ru.aliexpress.com/item/5PCS-. StoreLevelAB=3
Так как регулятор без проводов нужны и они.
На фото:
Слева плата регулятора, справа- ардуино нано.
Провод с разъемом для подключения батареи, кабель мини усб для подключения к ПК, провода с разъемами для подключения к приемнику. Можно взять удлинитель сервы
и разрезать его.
Далее чуть пайки. В ардуино нано впаиваем кусочек разъема-гребенки, что идет в комплекте. Нам важны два вывода- D3 и через один от него — GND. К этому разъему мы будем подключаться для программирования.
Впаиваем-
Теперь паяем провода на плату регулятора-
Слева- провода к мотору. В центре справа — провод с разъемом для подключения к приемнику или программатору. Обратите внимание- провода 2, бек-а регулятор не имеет.
Черный- земля (GND), желтый- сигнальный. Красный средний не ставим. И два провода- питание от батареи. Красный-плюс, черный- минус.
Собрал два на разные токи-
По железу все готово.
Теперь софт.
Первым делом нужно поставить драйвер для ардуино нано на ПК.
Процедура простая, как это сделать для примера можно почитать тут-
http://new-tech.in.ua/tips/153-ardui. driver-install
Далее идем и качаем BLHeliSuite
https://blhelisuite.wordpress.com/
зип-архив размером около 63 мб, распаковываем его.
Все готово для программирования регулятора.
Кабелем USB mini USB подключаем ардуину.
Заходим в распакованную папку и запускаем BLHeliSuite
Теперь ардуино превратим в программатор.
Жмем на вкладку «Make interfaces»
Выбираем порт, ваша ардуина должна появиться под каким то номером USB-SERIAL CH340 , его и выбираем. Жмем на «ArduinoUSBLinker (SK Bootloader)», на предложение жмем Yes, идет процесс загрузки, OK, Yes, OK.
Программатор готов.
Далее можно программировать регулятор.
Подключаем к ардуине провод от программатора. Не путайте концы- сигнальный к D3, земляной к GND.
Жмем «Select ATMEL/SILABS Interfase» Выбираем строку под номером 4 (Atmel SK. ).
Возвращаемся в прежнюю вкладку. «Atmel ESC Setup».
Проверяем порт- тот ли стоит. Baud ставим 57600. Подаем питание на регулятор.
Жмем «Connect».
Должно произойти соединение ( кнопка станет- дисконнект).
Жмем «Read Setup».
Произойдет считывание настроек регулятора, название регулятора и версия прошивки.
Вы можете поменять настройки в текущей прошивке, но лучше установить свежую. Для этого жмем » Flash BLHeli», будет предложена свежая прошивка, выбираем ее и жмем OK.
Соглашаемся, прошивка устанавливается.
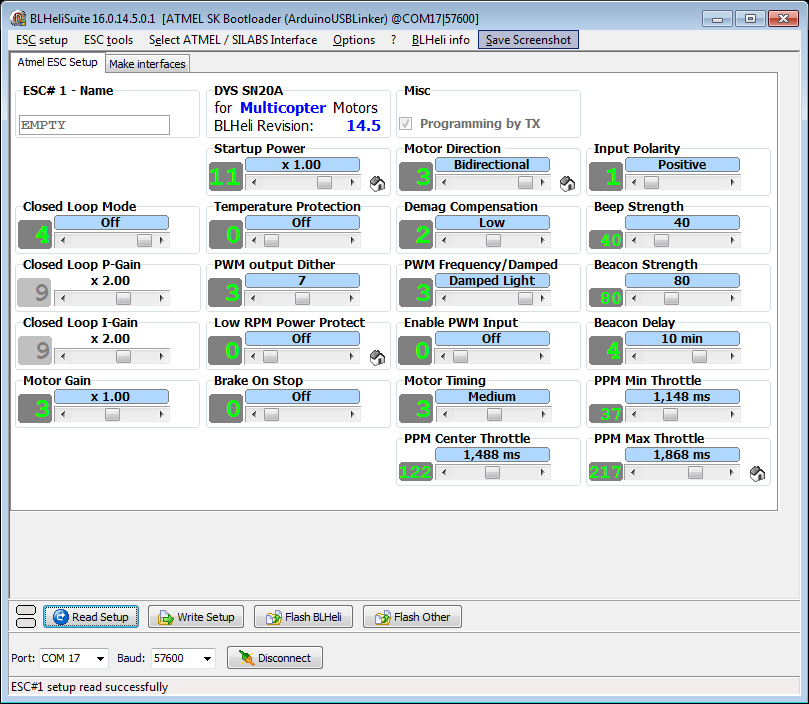
Далее меняем настройки, нас прежде всего интересует «Motor Direction» , ставим «Bidirectional».
Остальные настройки смотрите по скриншоту, на нем то как ставлю я.
Жмем «Write Setup», происходит копирование настроек и после этого регулятор готов к работе с реверсом.









Что еще добавить к этому:
1. Подобные настройки можно производить со всеми регуляторами, у которых прошивка BLHeli.
2. Программаторы существуют под это дело разные, их можно приобрести готовыми.
3.Плата Ардуино нано хороша тем что из нее можно сделать множество программаторов, в том числе и те которые с помощью этой программы могут перепрограммировать и регуляторы, в которых не стоит BLHeli.
Все это можно почитать в файлах справки, что есть в скачанном архиве.
Там же есть и перечень регуляторов с их фотографиями, которые проверены перешивкой.
О возможностях настроек на русском можно почитать в документе-
https://hobbyking.com/media/file/b/l. v14.x_rus_.pdf
П.С. Записи в этой категории дневника так или иначе перекликаются с созданное темой на форуме-
http://forum.rcdesign.ru/f68/thread511026.html
Обновлено 23.11.2017 в 08:47 [ARG:5 UNDEFINED]
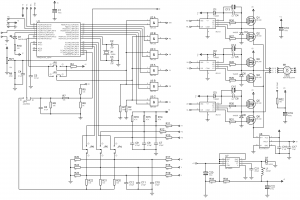
Схема регулятора скорости бесколлекторного двигателя (ESC)
Схема условно разделена на две части: левая — микроконтроллер с логикой, правая — силовая часть. Силовую часть можно модифицировать для работы с двигателями другой мощности или с другим питающим напряжением.
Контроллер — ATMEGA168. Гурманы могут сказать, что хватило бы и ATMEGA88, а AT90PWM3 — это было бы «вааще по феншую». Первый регулятор я как раз делал «по феншую». Если у Вас есть возможность применять AT90PWM3 — это будет наиболее подходящий выбор. Но для моих задумок решительно не хватало 8 килобайт памяти. Поэтому я применил микроконтроллер ATMEGA168.
Эта схема задумывалась как испытательный стенд. На котором предполагалось создать универсальный настраиваемый регулятор для работы с различными «калибрами» бесколлекторных двигателей: как с датчиками, так и без датчиков положения. В этой статье я опишу схему и принцип работы прошивки регулятора для управления бесколлекторными двигателями с датчиками Холла и без датчиков.
Схема регулятора
Питание
ШИМ и сигналы для ключей
Обратная связь (контроль напряжения фаз двигателя)
Датчики Холла
Измерения аналоговых сигналов
На вход ADC3(PC3) поступает аналоговый сигнал от датчика тока. Датчик тока ACS756SA. Это датчик тока на основе эффекта Холла. Преимущество этого датчика в том, что он не использует шунт, а значит, имеет внутреннее сопротивление близкое к нулю, поэтому на нем не происходит тепловыделения. Кроме того, выход датчика аналоговый в пределах 5В, поэтому без каких-либо преобразований подается на вход АЦП микроконтроллера, что упрощает схему. Если потребуется датчик с большим диапазоном измерения тока, Вы просто заменяете существующий датчик новым, абсолютно не изменяя схему.
Если Вам хочется использовать шунт с последующей схемой усиления, согласования — пожалуйста.
Задающие сигналы
Кроме того, есть вход RC сигнала, который повсеместно используется в дистанционно управляемых моделях. Выбор управляющего входа и его калибровка выполняется в программных настройках регулятора.
UART интерфейс
Прочее
Светодиод, сигнализирующий о состоянии регулятора, подключен к выводу PD4.
Силовая часть
Ключи нужно выбирать в зависимости от максимального тока и напряжения питания двигателя (выбору ключей и драйверов будет посвящена отдельная статья). На схеме обозначены IR540, в реальности использовались K3069. K3069 рассчитаны на напряжение 60В и ток 75А. Это явный перебор, но мне они достались даром в большом количестве (желаю и Вам такого счастья).
Конденсатор С19 включается параллельно питающей батареи. Чем больше его емкость — тем лучше. Этот конденсатор защищает батарею от бросков тока и ключи от значительной просадки напряжения. При отсутствии этого конденсатора Вам обеспечены как минимум проблемы с ключами. Если подключать батарею сразу к VD — может проскакивать искра. Искрогасящий резистор R32 используется в момент подключения к питающей батарее. Сразу подключаем «—» батареи, затем подаем «+» на контакт Antispark. Ток течет через резистор и плавно заряжает конденсатор С19. Через несколько секунд, подключаем контакт батареи к VD. При питании 12В можно Antispark не делать.
Возможности прошивки
- возможность управлять двигателями с датчиками и без;
- для бездатчикового двигателя три вида старта: без определения первоначального положения; с определением первоначального положения; комбинированный;
- настройка угла опережения фазы для бездатчикового двигателя с шагом 1 градус;
- возможность использовать один из двух задающих входов: 1-аналоговый, 2-RC;
- калибровка входных сигналов;
- реверс двигателя;
- настройка регулятора по порту UART и получение данных от регулятора во время работы (обороты, ток, напряжение батареи);
- частота ШИМ 16, 32 КГц.
- настройка уровня ШИМ сигнала для старта двигателя;
- контроль напряжения батарей. Два порога: ограничение и отсечка. При снижении напряжения батареи до порога ограничения обороты двигателя понижаются. При снижении ниже порога отсечки происходит полная остановка;
- контроль тока двигателя. Два порога: ограничение и отсечка;
- настраиваемый демпфер задающего сигнала;
- настройка Dead time для ключей
Работа регулятора
Включение
После включения двигатель издает 1 короткий сигнал (если звук не отключен), включается и постоянно светится светодиод. Регулятор готов к работе.
Для запуска двигателя следует увеличивать величину задающего сигнала. В случае использования задающего потенциометра, запуск двигателя начнется при достижении задающего напряжения уровня примерно 0.14 В. При необходимости можно выполнить калибровку входного сигнала, что позволяет использовать раные диапазоны управляющих напряжений. По умолчанию настроен демпфер задающего сигнала. При резком скачке задающего сигнала обороты двигателя будут расти плавно. Демпфер имеет несимметричную характеристику. Сброс оборотов происходит без задержки. При необходимости демпфер можно настроить или вовсе отключить.
Запуск
При опрокидывании двигателя или механическом заклинивании ротора срабатывает защита, и регулятор пытается перезапустить двигатель.
Запуск двигателя с датчиками Холла также выполняется с применением настроек для старта двигателя. Т.е. если для запуска двигателя с датчиками дать полный газ, то регулятор подаст напряжение, которое указано в настройках для старта. И только после того, как двигатель начнет вращаться, будет подано полное напряжение. Это несколько нестандартно для двигателя с датчиками, поскольку такие двигатели в основном применяются как тяговые, а в данном случае достичь максимального крутящего момента на старте, возможно, будет сложно. Тем не менее, в данном регуляторе присутствует такая особенность, которая защищает двигатель и регулятор от выхода со строя при механическом заклинивании двигателя.
Во время работы регулятор выдает данные об оборотах двигателя, токе, напряжении батарей через порт UART в формате:
Данные выдаются с периодичностью примерно 1 секунда. Скорость передачи по порту 9600.
Настройка регулятора
Переход регулятора в режим настройки происходит при включении регулятора, когда задающий сигнал потенциометра больше нуля. Т.е. Для перевода регулятора в режим настройки следует повернуть ручку задающего потенциометра, после чего включить регулятор. В терминале появится приглашение в виде символа «>«. После чего можно вводить команды.
Регулятор воспринимает следующие команды (в разных версиях прошивки набор настроек и команд может отличаться):
h — вывод списка команд; ? — вывод настроек; c — калибровка задающего сигнала; d — сброс настроек к заводским настройкам.
команда «?» выводит в терминал список всех доступных настроек и их значение. Например: Изменить нужную настройку можно командой следующего формата:
pwm.start=15
Если команда была дана корректно, настройка будет применена и сохранена. Проверить текущие настройки после их изменения можно командой «?«.
Измерения аналоговых сигналов (напряжение, ток) выполняются с помощью АЦП микроконтроллера. АЦП работает в 8-ми битном режиме. Точность измерения занижена намеренно для обеспечения приемлемой скорости преобразования аналогового сигнала. Соответственно, все аналоговые величины регулятор выдает в виде 8-ми битного числа, т.е. от 0 до 255.
Список настроек, их описание:
| Параметр | Описание | Значение |
|---|---|---|
| motor.type | Тип мотора | 0-Sensorless; 1-Sensored |
| motor.magnets | Кол.во магнитов в роторе двигателя. Изпользуется только для расчета оборотов двигателя. | 0..255, шт. |
| motor.angle | Угол опережения фазы. Используется только для Sensorless двигателей. | 0..30, градусов |
| motor.start.type | Тип старта. Используется только для Sensorless двигателей. | 0-без определения положения ротора; 1-с определением положения ротора; 2-комбинированный; |
| motor.start.time | Время старта. | 0..255, мс |
| pwm | Частота PWM | 16, 32, КГц |
| pwm.start | Значение PWM (%) для старта двигателя. | 0..50 % |
| pwm.min | Значение минимального значения PWM (%), при котором двигатель вращается. | 0..30 % |
| voltage.limit | Напряжение батареи, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255* |
| voltage.cutoff | Напряжение батареи, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255* |
| current.limit | Ток, при котором следует ограничивать мощность, подаваемую на двигатель. Указывается в показаниях ADC. | 0..255** |
| current.cutoff | Ток, при котором следует выключать двигатель. Указывается в показаниях ADC. | 0..255** |
| system.sound | Включить/выключить звуковой сигнал, издаваемый двигателем | 0-выключен; 1-включен; |
| system.input | Задающий сигнал | 0-потенциометр; 1-RC сигнал; |
| system.damper | Демпфирование входного сигнала | 0..255, условные единицы |
| system.deadtime | Значение Dead Time для ключей в микросекундах | 0..2, мкс |
* — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = (U*R6/(R5+R6))*255/5 Где: U — напряжение в Вольтах; R5, R6 — сопротивление резисторов делителя в Омах.
** — числовое значение 8-ми битного аналого цифрового преобразователя. Рассчитывается по формуле: ADC = U*255/5 Где: U — напряжение датчика тока в Вольтах, соответствующее требуемому току.
Фьюзы микроконтроллера должны быть выставлены на работу с внешним кварцем. Строка для программирования фьюзов с помощью AVRDUDE:
-U lfuse:w:0xFF:m -U hfuse:w:0xDC:m