Схема обмотки многоскоростных двигателей
24. СХЕМЫ ОБМОТОК МНОГОСКОРОСТНЫХ ТРЕХФАЗНЫХ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Многоскоростные трехфазные асинхронные двигатели обычно изготовляют на две, три и четыре частоты вращения.
Двухскоростные двигатели на кратные частоты вращения (число полюсов 2р=4/2; 8/4; 12/6) имеют на статоре одну двухслойную обмотку, которая может переключаться на два разных числа полюсов 4 и 2,8, и 4,12 и 6.
Двухскоростные двигатели на некратные частоты вращения (2р=6/4) имеют две отдельные обмотки, расположенные в одних и тех
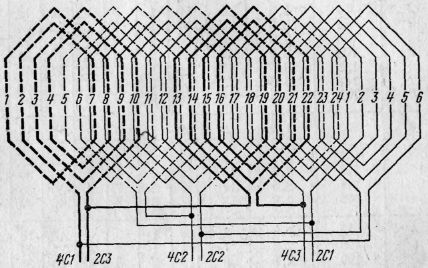
Рис. 48. Развернутая схема двухскоростной двухслойной обмотки при 2р=4/2, z=24, а=1 и соединении фаз Δ/YY
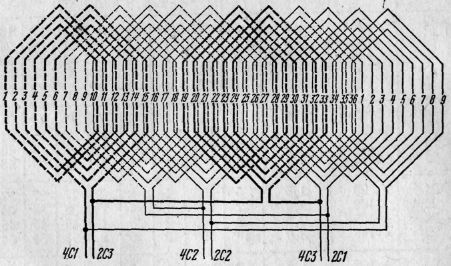
Рис 49. Развернутая схема двухскоростной двухслойной обмотки при 2р=4/2, z=36, а=1 и соединении фаз Δ/YY
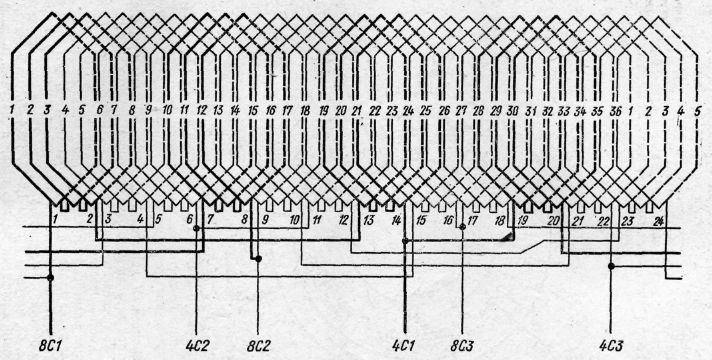
Рис. 50. Развернутая схема двухскоростной двухслойной обмотки при 2р=8/4, z=36, а=1 и соединении фаз Δ/YY
же пазах. В этом случае обмотки выполняют однослойными с концентрическими катушками. Катушечные группы обычно соединяют последовательно (число параллельных ветвей а=1), а фазы— в звезду, чтобы избежать замкнутых контуров при включенной в сеть второй обмотке.
Двигатели на три и четыре частоты вращения имеют также две отдельные обмотки. При трех частотах вращения одна обмотка переключается на два разных числа полюсов, а вторая имеет промежу-
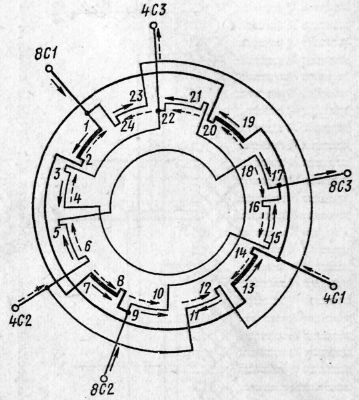
Рис. 51. Торцовая схема двухскоростной двухслойной обмотки при 2р=8/4, а=1 и соединении фаз Δ/YY
точное число полюсов. У двигателей на четыре частоты вращения каждая из обмоток переключается на два числа полюсов.
На рис. 48—56 приведены наиболее распространенные схемы обмоток статоров многоскоростных двигателей.
При небольших размерах расточки статора и числе полюсов 2р=4/2 применяют такие двухслойные обмотки (рис. 48, 49), у которых часть катушек укладывается на дно паза, а часть — у клина (в верхнем слое обмотки). Например, у обмотки, схема которой представлена на рис. 48, катушки в пазы 1,2—7,8; 3,4—9,10 и 5,6—11,12 укладывают обеими сторонами на дно паза, а катушки в пазах 21,22—3,4; 23,24—5,6 и 19,20—1,2— обеими сторонами у клина. Это облегчает укладку обмотки, так как не приходится поднимать
верхние стороны первых катушек при закладке в пазы катушек последнего шага. Остальные катушки укладываются как в обычной двухслойной обмотке.
Двухслойная двухскоростная обмотка изготовляется в виде катушечных групп, укладка которых производится как в обычной двухслойной обмотке. Соединение выводов катушечных групп двухскоростной обмотки может быть также представлено в виде круговой схемы. На рис. 51 и 53 изображены торцовые схемы, соответствующие развернутым схемам, показанным на рис. 50 и 52.
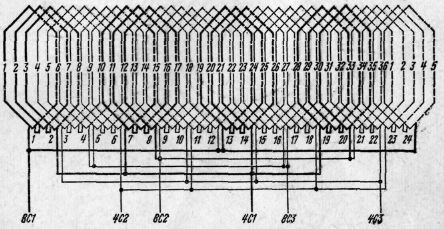
Рис. 52. Развернутая схема двухскоростной двухслойной обмотки при 2р=8/4, z=36, a=2 и соединении фаз Δ/YY
Катушечные группы в двухслойных двухскоростных обмотках в каждой фазе разделяются на две части таким образом, чтобы при подключении на меньшее число полюсов ток в половине катушечных групп изменял направление. При большем числе полюсов направление тока во всех катушечных группах фазы одинаково. На рисунках направление тока в группах показано при подключении на большее число полюсов сплошной стрелкой, при подключении на меньшее число полюсов — пунктирной. Направление тока на схемах в первой и второй фазах принято от начала фазы к концу, в третьей фазе — от конца к началу.
Рассмотрим для примера схему, показанную на рис. 51. Из нее следует, что должны быть соединены между собой выводы катушечных групп: 2—13, 4—15, 10—21, 12—23, 18—5, 20—7. Начала фаз присоединяются к выводам: 8С1—1—24; 8С2—8—9; 8С3—16—17; 4С1 —14—19; 4С3—3—22; 4С2—6—11.
При включении схемы на большее число полюсов к сети присоединяются начала фаз 8С1, 8С2 и 8СЗ. При этом ток в катушечных группах каждой фазы направлен одинаково; в первой и второй фазах—от начала к концу (от нечетной цифры к четной), в третьей — от конца к началу. При включении на меньшее число полюсов ток в половине катушечных групп каждой фазы меняет направление на противоположное (группы: 1—2,3—4, 11—12, 13—14; 15—16; 23—24).
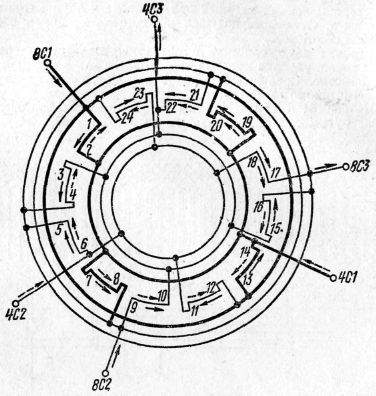
Рис. 53. Торцовая схема двухскоростной двухслойной обмотки при 2р=8/4, a=2 и соединении фаз Δ/YY
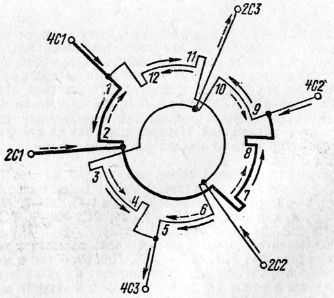
Рис. 54. Торцовая схема двухскоростной двухслойной обмотки при 2р=4/2, a=1 и соединении фаз Δ/YY
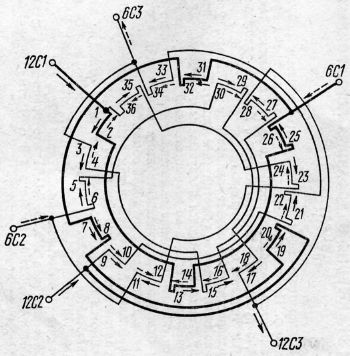
Рис. 55. Торцовая схема двухскоростной двухслойной обмотки при 2р=12/6, a=1 и соединении фаз Δ/YY
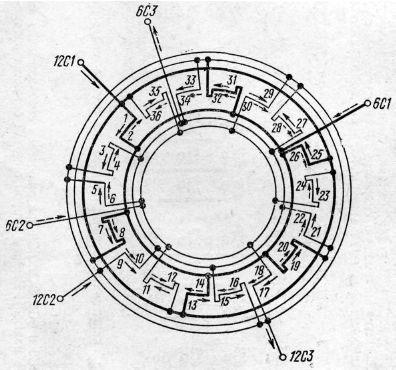
Рис. 56. Торцовая схема двухскоростной двухслойной обмотки при 2р=12/6, а=3 и соединении фаз Δ/YY
У многоскоростного двигателя одновременно к сети подключается одна из обмоток (рис. 57). Если эта обмотка с переключением чисел полюсов и включается на высшую скорость, то остальные выводы от нее при соединении фаз Δ/YY замыкаются накоротко (зажимы
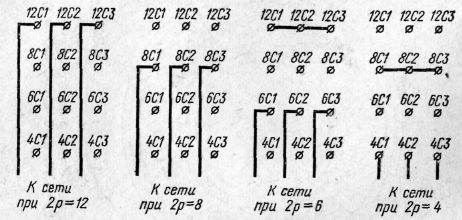
Рис. 57. Схема включения электродвигателей на четыре скорости вращения
12С1, 12С2, 12С3 и 8С1, 8С2, 8С3 при включении соответственно на шесть и четыре полюса). Выводы второй обмотки остаются разомкнутыми.
Обмотчик электрических машин — Схемы обмоток статоров многоскоростных двигателей
Содержание материала
Во многих механизмах требуется изменять скорость в процессе работы. Чаще всего для привода таких механизмов используют двигатели постоянного тока, но в ряде случаев применяют также и асинхронные двигатели, как более дешевые и надежные.
Частоту вращения асинхронного двигателя можно определить по формуле n= 1 — s) = (60f/p)(1 — s). Из этой формулы следует, что частоту вращения асинхронного двигателя можно регулировать, изменяя частоту питающего тока I, скольжение s или число пар полюсов двигателя р. На практике применяют все три способа регулирования. Изменение частоты тока возможно с помощью статических преобразователей частоты. Скольжение меняют путем включения активного сопротивления в. цепь фазного ротора. Число полюсов обмотки можно изменить в двигателях, имеющих обмотки, соединенные в специальные схемы.
Такие двигатели называют многоскоростными, а их обмотки — полюсно-переключаемыми.
Переключение чисел обмотки асинхронного двигателя — простой и распространенный метод регулирования, так как не требуется дополнительного оборудования и в то же время обеспечивается работа двигателя с достаточно высокими энергетическими показателями на разных частотах вращения. Он широко применяется на практике, несмотря на то что частота вращения этим методом изменяется только ступенями. Частота вращения поля в машине n= 60f/p. При токе промышленной частоты f= 50 Гц она равна 3000 об/мин при 2р = 2, 1500 об/мин при 2р — 4, 1000 об/мин при 2р — 6 и т. д.
Частота вращения двигателя при переключении ее обмотки на разные числа полюсов меняется в таком же соотношении. Изменения числа полюсов статора можно достичь двумя способами: установкой в пазы статора двух независимых обмоток, выполненных на разные числа полюсов, или переключением схемы соединения катушечных групп одной обмотки.
Первый способ дает возможность получить любые соотношения между числами полюсов и, следовательно, между частотами вращения двигателя. Недостатком такого способа регулирования является неполное использование объема пазов статора, так как в пазы укладываются обе обмотки, а двигатель работает только на одной из них. Вторая обмотка в это время отключена и занятая ею часть объема пазов не используется. Это вызывает необходимость увеличения размеров пазов и всего двигателя по сравнению с односкоростным той же мощности.
Второй способ изменения числа полюсов основан на изменении направлений магнитных потоков в машине путем переключения схемы обмотки. На рис. 37, а на поперечном сечении машины с 2р = 2 условно показано положение двух катушечных групп (1 и 4), принадлежащих одной фазе в двухполюсной обмотке. Стрелками отмечено направление магнитных силовых линий потока машины. На схеме соединения катушечных групп этой фазы также стрелками отмечено направление обтекания их током. Причем направление стрелки над катушечной группой вправо (1-я катушечная группа) соответствует направлению силовых линий потока от центра, а влево (4-я катушечная группа) — к центру. При таком соединении катушечных групп обмотка образует два полюса. На рис. 37, б такое же построение проделано для четырехполюсной машины, одной фазе обмотки которой принадлежат 1, 4, 7 и 10-я катушечные группы.

Рис. 37. Направления потоков в магнитопроводе и условные схемы обмотки одной фазы машины:
а —с двумя катушечными группами при 2р=2, б — с четырьмя катушечными, группами при 2р=4, в — с двумя катушечными группами при 2р=4
При встречном включении четырех катушечных групп, т. е. при принятой в обычных двухслойных обмотках схеме, обмотка образует четыре полюса: два одной и два другой полярности. Такую же картину поля можно получить и при двух катушках в одной фазе обмотки, если их включить не встречно, а согласно, как показано на рис. 37, в. Сравнив между собой направления потоков и схемы обмоток, видим, что изменение направления тока в одной катушечной группе фазы двухполюсной обмотки приводит к увеличению числа полюсов с двух до четырех, т. е. в два раза. Если таким же образом изменить схему соединений двух (4-ю и 10-ю или 1-ю и 7-ю) катушечных групп четырехполюсной машины, то распределение потока будет такое же, как в машине с 2р = 8. Таким образом, изменение направления включения половины катушечных групп в схеме двухслойной обмотки приводит к увеличению числа полюсов машины в два раза.
Этот принцип используется во всех двухскоростных асинхронных двигателях с отношением чисел полюсов 1 : 2, например в двигателях с переключением чисел полюсов с 2р = 2 на 2р = 4 или с 2р = 4 на 2р = 8.
В коробке выводов многоскоростных двигателей шесть зажи- мов,к которым подсоединены выводные концы обмоток (рис. 38, а). Они обозначаются так же, как и выводные концы обычных обмоток (см. табл. 2), но перед обозначением ставится число, указывающее, сколько полюсов будет иметь обмотка, если эти выводы подключить к сети. Для работы двухскоростного двигателя на 2р — 2/4 с числом полюсов 2р = 2 с сетью соединяются выводы 2С1, 2С2 и 2СЗ (рис. 38, б); выводы 4С1, 4С2 и 4СЗ соединены между собой накоротко. Обмотка при этом соединяется в звезду с двумя параллельными ветвями. Если с сетью соединены выводы 4С1, 4С2 и 4С3, а выводы 2С1, 2С2 и 2С3 разомкнуты (рис. 38, в), то обмотка образует четыре полюса и соединяется в треугольник при а — 1.
Аналогичные схемы включения имеют двухскоростные двигатели и на другие числа полюсов (2р = 4/8, 6/12 и т. п.). Схемы соединений — звезда или треугольник — и числа параллельных ветвей каждой из схем определяются требованиями к соотношениям мощностей двигателей при различных частотах вращения.

Рис. 38. Схема включения обмоток на 2р
а — соединения внутри машины, б — включение обмотки на 2р=2 при а= 2, в —включение обмотки на 2р=4 при а— 1
В статор трехскоростного двигателя укладывают две раздельные обмотки: одна обычная, а другая полюсно-переключаемая, например в двигателе на 2р = 4/6/8 обычная обмотка имеет 6 полюсов, а полюсно-переключаемая — 2р = 4/8.
В четырехскоростном двигателе также две самостоятельные обмотки, обе полюсно-переключаемые, например, в двигателе на 2р = 4/6/8/12 одна обмотка может быть включена на 4 или 8 полюсов, а вторая — на 6 или 12.
В новых сериях асинхронных двигателей применяют более сложные схемы полюсно-переключаемых обмоток, которые позволяют изменять числа полюсов и в отношениях, отличных от 1:2. В серии 4А выпускаются, например, двигатели с одной полюсно-переключаемой обмоткой на 2р = 4/6 или на 2р = 6/8 полюсов и т. д. Количество выводных концов и их обозначения остаются такими же, как и в ранее рассмотренных схемах.
Многоскоростные однофазные конденсаторные электродвигатели
Однофазные асинхронные двигатели выпускаются для работы без регулирования частоты вращения. В тех же случаях, когда необходимо изменять частоту вращения, чаще всего используются двигатели с изменением числа пар полюсов.
В целом, для изменения скорости однофазного двигателя можно применить 3 различных способа. Один состоит в том, что в статоре помещаются 2 полных комплекта обмоток, каждый для различного числа полюсов. Тогда согласно уравнению 2 различные скорости получаются при одной и той же частоте сети. Другие 2 способа состоят в изменении напряжения на зажимах двигателя или в изменении числа витков главной обмотки путем ответвлений от нее.
Способ, основанный на использовании 2 комплектов обмоток, применяется главным образом для двигателей с расщепленной фазой и двигателей с конденсаторным пуском. Способы, основанные на изменении напряжения или использовании обмотки с ответвлениями, применяются главным образом для конденсаторных двигателей с постоянно включенной емкостью.

В настоящее время для привода различных механизмов широкое распространение получили многоскоростные асинхронные конденсаторные электродвигатели (электродвигатели с одной постоянно включенной емкостью). Такой тип электродвигателей не требует дополнительных элементов, необходимых для включения в сеть, а также позволяет достаточно просто менять направление вращения вала. Для этого достаточно поменять в схеме местами концы главной или вспомогательной обмоток.
В конденсаторных двигателях применяются основные схемы включения обмоток, показанные на рис. 1. Наибольшее распространение получила так называемая параллельная схема соединения обмоток (рис. 1, а). Как видно из рисунка, обмотки статора включаются в сеть питания параллельно. Фазосдвигающая емкость С включается последовательно со вспомогательной обмоткой.
Величина емкости конденсатора выбирается из условий обеспечения требуемых характеристик электродвигателей. В основном в конденсаторных двигателях емкость выбирается такой, чтобы сдвиг фаз токов в главной и во вспомогательной обмотках в номинальном режиме был близок к 90°. В этом случае двигатель имеет наилучшие энергетические показатели в рабочей точке, но ухудшаются пусковые.
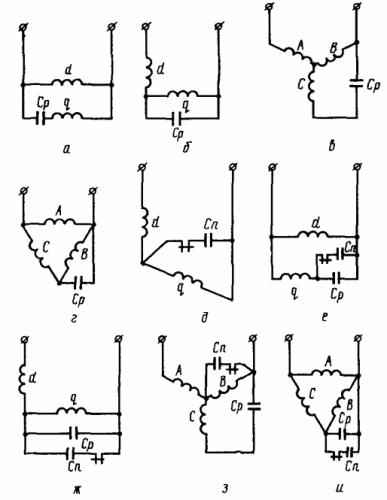
Рис. 1. Схемы соединения обмоток асинхронных двигателей
Изменение частоты вращения конденсаторных двигателей осуществляется, чаще всего за счет изменения числа пар полюсов. Для этого на статоре укладывается либо два комплекта обмоток с различным числом полюсов, либо один комплект, с переключением числа полюсов.
В тех же случаях, когда не требуется значительного диапазона регулирования частоты вращения, используется наиболее простой способ — изменение числа витков рабочей обмотки. В этом случае при неизменности напряжения сети изменяется величина магнитного потока электродвигателя и, следовательно, электромагнитный момент и частота врашения ротора.
Двухскоростные двигатели при обмотках с ответвлениями
Ранее было указано, что скорость однофазного двигателя может быть изменена или путем изменения напряжения на его зажимах, или путем изменения числа витков его вторичнной обмотки. Первый способ делает необходимым примение автотрансформатора и используется главным образом для конденсаторных двигателей с постоянно включенной емкостью, имеющих на валу вентилятор.
При автотрансформаторе можно получить и больше, чем 2 скорости. Изменение числа витков главной обмотки получается путем ответвлений от нее. Статор тогда имеет 3 обмотки: главную, промежуточную и вспомогательную. Первые 2 обмотки имеют одну и ту же магнитную ось, т. е. промежуточная обмотка наматывается в тех же пазах, что и главная обмотка (над ней).
Практическая реализация этого способа осуществляется следующим образом. В пазах статоре помимо проводников рабочей (РО) и конденсаторной обмоток (КО), укладываются проводники дополнительной обмотки (ДО). В результате комбинации различных схем включения обмоток (рис. 2) удастся получить при неизменной величине питающего напряжения различные механические характеристики электродвигателя.
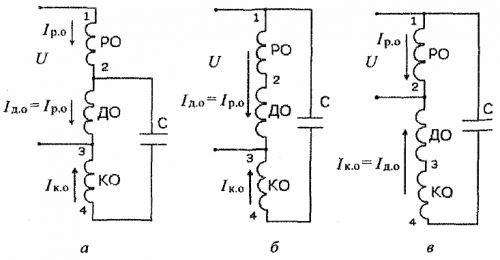
Рис. 2. Схемы соединений статорных обмоток многоскоростного конденсаторного двигателя при минимальной (а), повышенной (б) и максимальной частоте вращения (в)
В процессе регулирования частоты вращения в многоскоростных конденсаторных электродвигателях возникают переходные процессы, связанные с изменением схем включения обмоток статора. Эти процессы протекают, как правило, при незатухающих магнитных полях и могут вызнать значительные броски токов и перенапряжения в обмотках двигателя и фазосмещающем конденсаторе.
Двухскоростные двигатели с 2 комплектами обмоток
Размещение 2 комплектов обмоток, т. е. 2 главных обмоток и 2 вспомогательных обмоток, требует значительного увеличения размеров. Для того чтобы уменьшить эти размеры, часто применяется соединение для вспомогательной или низкоскоростной обмотки, при котором число катушечных групп получается меньше числа полюсов.
На рис. 3 показана схема соединений обмоток для 4 и 6 полюсов (примерно 1435 а 950 об/мин при 50 гц). Внешняя обмотка — 4-полюсная главная обмотка. Следующая — 6-полюсная главная обмотка. Третья — 4-полюсная вспомогательная обмотка, имеющая только 2 катушечные группы. Внутренняя обмотка — 6-полюсная вспомогательная обмотка, имеющая также только 2 катушечные группы.
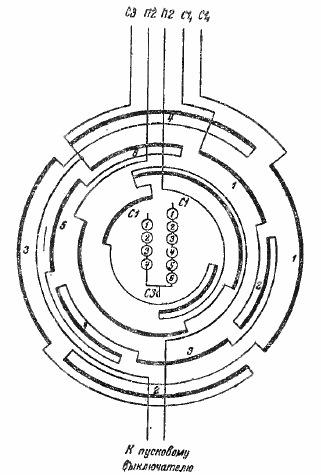
Рис. 3. Схема соединений для 2-скоростного (4 и 6 полюсов) двигателя.
На рис. 3 обе вспомогательные обмотки имеют уменьшенное число катушечных групп. Можно также и главную обмотку сделать такого же типа.
Рассмотрим 2 примера. Статорная обмотка для 4 и 8 полюсов может иметь нормальную 4-полюсную главную обмотку и 3 другие обмотки с уменьшенным числом катушечных групп, т. е. 8-полюсную главную обмотку с 4 катушечными группами, 4-полюсную вспомогательную обмотку с 2 катушечными группами и 8-полюсную вспомогательную обмотку с 4 катушечными группами.
Статорная обмотка для 6 и 8 полюсов может иметь нормальную 6-полюсную главную обмотку, две 8-полюсные обмотки с уменьшенным числом групп, т. е. 8-полюсную главную обмотку и 8-полюсную вспомогательную обмотку с 4 полюсными группами каждая, а 6-полюсную вспомогательную обмотку с 2 катушечными группами. 6-полюсная вспомогательная обмотка может быть также выполнена в виде нормальной обмотки, т. е. с 6 катушечными группами.
На рис. 4 показана схема 2-скоростного двигателя с расщепленной фазой с 2 обмотками и здесь же показано присоединение его к сети. Соединения выполнены таким образом, что требуется только 1 пусковой выключатель. Этот пусковой выключатель должен выключаться при 75 — 80% синхронной скорости низкоскоростной обмотки.
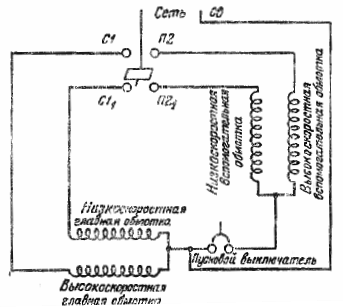
Рис. 4. Схема двухскоростного двигателя с расщепленной фазой
Если схема, показанная на рис. 4, применяется для двигателя с конденсаторным пуском, то используется или 1 конденсатор, соединенный последовательно с пусковым выключателем, или 2 конденсатора, 1 из которых соединяется последовательно с выводом П2, а другой — с выводом П21.
Если двигатель всегда можно пускать при соединении, соответствующем одной и той же скорости, то одна из вспомогательных обмоток может быть исключена. Пуск в этом случае частично или полностью автоматизируется.
Многоскоростные асинхронные однофазные электродвигатели ДАСМ
Для достижения больших частот вращения в бытовой технике часто необходимы электродвигатели с большим соотношением скоростей вращения ротора. Для этих целей применяются однофазные конденсаторные асинхронные двигатели с числами полюсов 2/12; 2/14; 2/16; 2/18; 2/24 и даже выше.
Однако изготовление двигателей с большим соотношением полюсов технологически сложно, поэтому пользуются разного рода механическими преобразователями частоты вращения, а также полупроводниковыми преобразователями частоты питающего напряжения.
Наиболее просто частота вращения в небольших пределах у этих двигателей регулируется изменением напряжения питания, для этого последовательно с обмоткой включаются дополнительные резисторы или дроссели.
Еще в СССР для привода бытовых автоматических стиральных машин был разработан двухскоростные конденсаторные электродвигатели типа ДАСМ-2 и ДАСМ-4 с числом полюсов 16/2.
Двигатель ДАСМ-2 был разработан для привода, автоматических стиральных машин емкостью 4 — 5 кг сухого белья. Первоначально он был рассчитан на номинальные мощности 75/400 Вт при частотах вращения 390/2750 об/мин.

Рис. 5. Двухскоростной конденсаторный асинхронный электродвигатель типа ДАСМ-2
На рис. 5 показаны схемы включения двигателей ДАСМ-2 и ДАСМ-4 в питающую сеть. Как видно из рисунка, двигатель ДАСМ-2 имеет на статоре четыре обмотки. Главная и вспомогательная обмотки соединены по параллельной схеме включения.
Двигатель ДАСМ-4 на низкой частоте вращения выполнен с трехфазной схемой включения в звезду, а на высокой частоте вращения — с параллельным включением обмоток статора. На статоре двигателя укреплено температурное реле РК-1-00 для защиты обмоток при перегрузках и в режимах короткого замыкания. Нормально замкнутые контакты реле включены в общий вывод статора электродвигателя.
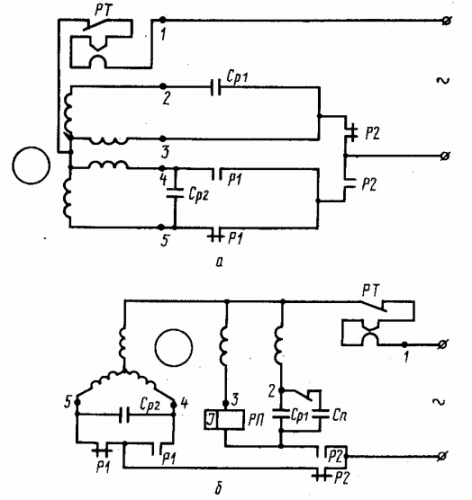
Рис. 5. Схемы подключения двухскоростных электродвигателей к сети питания: а — электродвигателя ДАСМ-2; б — электродвигателя ДАСМ-4. Г.О. — главная обмотка; В.О, — вспомогательная обмотка; 1 — общий вывод обмоток малой и большой частоты вращения; 2 — конец вспомогательной обмотки большой частоты вращения; 3 — начало главной обмотки большой частоты вращения; 4 — начало вспомогательной обмотки низкой частоты вращения; 5 — начало главной обмотки низкой частоты вращения; Ср — рабочий конденсатор; Сп — пусковой конденсатор; РТ — реле тепловое защитное типа РК-1-00; РП — реле пусковое типа РТК-1-11; Р1, Р2 — контакты командоаппарата.