Что такое H-мост и зачем он нужен. Пример расчёта H-моста на биполярных транзисторах
Сегодня мы рассмотрим схему, позволяющую изменять полярность прикладываемого к нагрузке постоянного напряжения.
Необходимость изменять полярность напряжения часто возникает при управлении двигателями или в схемах мостовых преобразователей напряжения. Например, для двигателей постоянного тока это необходимо для изменения направления вращения, а шаговые двигатели или импульсные мостовые DC-DC преобразователи без решения этой задачи вообще не будут работать.
Итак, ниже вы можете видеть схему, которую за внешнюю схожесть с буквой H принято называть H-мостом.
К1, К2, К3, К4 — управляемые ключи
A, B, C, D — сигналы управления ключами
Идея этой схемы очень проста:
Если ключи K1 и К4 замкнуты, а ключи К2 и К3 разомкнуты, то к точке h1 оказывается приложено напряжение питания, а точка h2 замыкается на общий провод. Ток через нагрузку в этом случае течёт от точки h1 к точке h2.
Если сделать наоборот, — ключи К1 и К4 разомкнуть, а ключи К2 и К3 замкнуть, то полярность напряжения на нагрузке изменится на противоположную, — точка h1 окажется замкнута на общий провод, а точка h2 — на шину питания. Ток через нагрузку теперь будет течь от точки h2 к точке h1.
Кроме смены полярности, h-мост, в случае управления электродвигателем, добавляет нам и ещё один бонус — возможность закоротить концы обмоток, что ведёт к резкому торможению нашего движка. Такой эффект можно получить замкнув одновременно либо ключи К1 и К3, либо ключи К2 и К4. Назовём такой случай «режимом торможения». Справедливости ради стоит отметить, что этот бонус H-моста используется значительно реже, чем просто смена полярности (позже будет понятно почему).
В качестве ключей может выступать всё, что угодно: реле, полевые транзисторы, биполярные транзисторы. Промышленность делает H-мосты встроенными в микросхемы (например, микросхема LB1838, драйвер шагового двигателя, содержит два встроенных H-моста) и выпускает специальные драйверы для управления H-мостами (например драйвер IR2110 для управления полевиками). В этом случае, разработчики микросхем конечно стараются выжать максимум бонусов и устранить максимум нежелательных эффектов. Понятно, что такие промышленные решения справляются с задачей лучше всего, но радиохламеры народ бедный, а хорошие микросхемы стоят денег, поэтому мы, ясен пень, будем рассматривать чисто самопальные варианты мостов и схем управления ими.
В самопальщине (то бишь в радиолюбительской практике) чаще всего используют H-мосты либо на мощных MOSFET-ах (для больших токов), либо на биполярных транзисторах (для небольших токов).
Довольно часто сигналы управления ключами попарно объединяют. Объединяют их таким образом, чтобы от одного внешнего сигнала управления формировалось сразу два сигнала управления в нашей схеме (то есть сразу на два ключа). Это позволяет сократить количество внешних сигналов управления с четырёх до двух штук (и сэкономить 2 ноги контроллера, если у нас контроллерное управление).
Объединяют сигналы чаще всего двумя способами: либо A объединяют с B, а C объединяют с D, либо A объединяют с D, а B объединяют с C. Чтобы обозначить и зафиксировать различия, — назовём способ, когда образуют пары AB и CD «общим управлением противофазными ключами» (эти ключи для изменении полярности прикладываемого к нагрузке напряжения должны работать в противофазе, т.е. если один открывается — другой должен закрываться), а способ, когда образуются пары AD и BC назовём «общим управлением синфазными ключами» (эти ключи для изменении полярности работают синфазно, т.е. либо оба должны открываться, либо оба закрываться).
Чтобы было понятнее о чём идёт речь, — смотрим на рисунок справа. Договоримся далее высокий уровень напряжения считать единицей, а низкий — нулём. В левой части рисунка транзисторы управляются независимо друг от друга. Чтобы открыть верхний транзистор — нужно подать сигнал управления А=0, а чтобы его закрыть — нужно подать А=1. Для открытия и закрытия нижнего транзистора нужно подавать B=1 или В=0. Если с помощью дополнительного транзистора объединить сигналы A и В (смотрим правую часть рисунка), то управлять верхним и нижним транзистором можно одним общим сигналом АВ. Когда АВ=1 оба транзистора открываются, а когда АВ=0 — оба закрываются.
На рисунке слева показан H-мост с общим управлением противофазными ключами, а на рисунке справа — с общим управлением синфазными ключами. У1 и У2 — это узлы, позволяющие из одного внешнего общего сигнала сформировать отдельный сигнал на каждый из работающих в паре ключей.
Теперь давайте подумаем что нам даёт каждый из этих двух способов управления.
При общем управлении противофазными ключами мы легко можем сделать так, чтобы оба верхних или оба нижних ключа оказались открыты (если схема такая, как у нас слева, то это произойдёт при AB=CD), то есть нам доступен режим торможения. Однако минус в том, что при таком способе управления мы практически наверняка получим сквозные токи через транзисторы, вопрос будет только в их величине. В проиышленных микрухах для борьбы с этой проблемой вводят специальную цепь задержки для одного из транзисторов.
При общем управлении синфазными ключами мы легко можем побороть сквозные токи (просто нужно сначала подавать сигнал на выключение той пары транзисторов, которая используется в настоящий момент, а уже потом сигнал на включение той пары, которую мы планируем использовать). Однако при таком управлении про режим торможения можно забыть (даже более того, если мы случайно одновременно подадим на оба внешних управляющих сигнала единицу — мы устроим в схеме КЗ).
Поскольку получить сквозные токи гораздо более кислый вариант (бороться с ними непросто), то обычно предпочитают забыть про режим торможения.
Кроме всего вышеперечисленного необходимо понимать, что при частых постоянных переключениях (в преобразователях или при управлении шаговиками), для нас будет принципиально важно не только избежать возникновения сквозных токов, но и добиться максимальной скорости переключения ключей, поскольку от этого зависит их нагрев. Если же мы используем h-мост просто для реверса двигателя постоянного тока, то тут скорость переключения не имеет такого критического значения, поскольку переключения не имеют систематического характера и ключи даже в случае нагрева скорее всего успеют остыть до следующего переключения.
Вот в общем-то и вся теория, если вспомню ещё что-нибудь важное — обязательно напишу.
Как вы понимаете, практических схем H-мостов, как и вариантов управления ими, можно придумать достаточно много, поскольку, как мы уже разобрались, важно учитывать и максимальный ток, и скорость переключения ключей, и варианты объединения управления ключами (а также вообще возможность такого объединения), поэтому для каждой практической схемы нужна отдельная статья (с указанием того, где эту конкретную схему целесообразно использовать). Здесь же я приведу для примера лишь простую схемку на биполярных транзисторах, годящуюся, скажем, для управления не очень мощными двигателями постоянного тока (зато покажу, как её рассчитывать).
Сам H-мост выполнен на транзисторах T1, T2, T3, T4, а с помощью дополнительных транзисторов T5, T6 выполнено объединение управления синфазными ключами (сигнал A управляет транзисторами T1 и T4, сигнал B — транзисторами T2 и T3).
Работает эта схема следующим образом:
Когда уровень сигнала A становится высоким — начинает течь ток через резистор R2 и p-n переходы БЭ транзисторов T5 и T4, эти транзисторы открываются, в результате чего появляется ток через переход БЭ транзистора T1, резистор R1 и открытый транзистор T5, в результате чего открывается транзистор T1.
Когда уровень сигнала A становится низким — запираются p-n переходы БЭ транзисторов T5 и T4, эти транзисторы закрываются, прекращает течь ток через переход БЭ транзистора T1 и он тоже закрывается.
Как такую схему рассчитать? Очень просто. Пусть у нас напряжение питания 12В, максимальный ток двигателя 1А и сигнал управления также 12-ти вольтовый (состоянию «1» соответствует уровень напряжения около 12В, состоянию «0» — уровень около нуля вольт).
Сначала выбираем транзисторы T1, T2, T3, T4. Подойдут любые транзисторы, способные выдержать напряжение 12В и ток 1А, например, КТ815 (npn) и его комплиментарная пара — КТ814 (pnp). Эти транзисторы рассчитаны на ток до 1,5 Ампер, напряжение до 25 Вольт и имеют коэффициент усиления 40.
Рассчитываем минимальный ток управления транзисторов T1, T4: 1А/40=25 мА.
Рассчитываем резистор R1, полагая, что на p-n переходах БЭ транзисторов T1, T4 и на открытом транзисторе T5 падает по 0,5В: (12-3*0,5)/25=420 Ом. Это максимальное сопротивление, при котором мы получим нужный ток управления, поэтому мы выберем ближайшее меньшее значение из стандартного ряда: 390 Ом. При этом наш ток управления будет (12-3*0,5)/390=27 мА, а рассеиваемая на резисторе мощность: U 2 /R=283 мВт. То есть резистор надо ставить на 0,5 Вт (ну или поставить несколько 0,125 ваттных параллельно, но чтоб их общее сопротивление получилось 390 Ом)
Транзистор T5 должен выдерживать всё те же 12В и ток 27 мА. Подойдёт, например, КТ315А (25 Вольт, 100 мА, минимальный коэффициент усиления 30).
Рассчитываем его ток управления: 27 мА / 30 = 0,9 мА.
Рассчитываем резистор R2, полагая, что на переходах БЭ транзисторов T5 и T4 падает по 0,5 В: (12-2*0,5)/0,9 = 12 кОм. Опять выбираем ближайшее меньшее значение из стандартного ряда: 10 кОм. При этом ток управления T5 будет 1,1 мА и на нём будет рассеиваться 12,1 мВт тепла (то есть подойдёт обычный резистор на 0,125 Вт).
Вот и весь расчёт.
Далее хотелось бы поговорить вот о чём. В приведённых в статье теоретических схемах H-мостов у нас нарисованы только ключи, однако в рассматриваемом примере, кроме ключей присутствуют ещё одни элементы — диоды. Каждый наш ключ шунтирован диодом. Зачем это сделано и можно ли сделать как-то иначе?
В нашем примере мы управляем элетродвигателем. Нагрузкой, на которой мы переключаем полярность с помощью H-моста, является обмотка этого двигателя, то есть нагрузка у нас индуктивная. А у индуктивности есть одна интересная особенность — ток через неё не может измениться скачком.
Индуктивность работате как маховик — когда мы его раскручиваем — он запасает энергию (и мешает раскручиванию), а когда мы его отпускаем — он продолжает крутиться (расходуя
запасённую энергию). Так и катушка, — когда к ней прикладывают внешнее напряжение — через неё начинает течь ток, но он не резко вырастает, как через резистор, а постепенно, поскольку часть передаваемой источником питания энергии не расходуется на разгон электронов, а запасается катушкой в магнитном поле. Когда мы это внешнее напряжение убираем, — ток через катушку тоже не спадает мгновенно, а продолжает течь, уменьшаясь постепенно, только теперь уже на поддержание этого тока расходуется запасённая ранее в магнитном поле энергия.
Так вот. Посмотрим ещё раз наш самый первый рисунок (вот он, справа). Допустим у нас были замкнуты ключи К1 и К4. Когда мы эти ключи размыкаем, у нас через обмотку продолжает течь ток, то есть заряды продолжают перемещаться от точки h1 к точке h2 (за счёт энергии, накопленной обмоткой в магнитном поле). В результате этого перемещения зарядов, потенциал точки h1 падает, а потенциал точки h2 вырастает. Возникновение разности потенциалов между точками h1 и h2 при отключении катушки от внешнего источника питания известно также как ЭДС самоиндукции. За то время, пока мы открываем ключи K3 и К2, потенциал точки h1 может упасть значительно ниже нуля, также как и потенциал точки h2 может вырасти значительно выше потенциала шины питания. То есть наши ключи могут оказаться под угрозой пробоя высоким напряжением.
Как с этим бороться? Есть два пути.
Первый путь. Можно зашунтировать ключи диодами, как в нашем примере. Тогда при падении потенциала точки h1 ниже уровня общего провода откроется диод D3, через который с общего провода в точку h1 потечёт ток, и дальнейшее падение потенциала этой точки прекратиться. Аналогично, при росте потенциала точки h2 выше потенциала шины питания откроется диод D2, через который потечёт ток из точки h2 на шину питания, что опять же предотвратит дальнейший рост потенциала точки h2.
Второй путь основан на том факте, что при перекачивании зарядов из одной точки схемы в другую, изменение потенциалов между этими двумя точками будет зависеть от ёмкости схемы между этими точками. Чем больше ёмкость — тем больший заряд нужно переместить из одной точки в другую для получения одной и той же разности потенциалов (подробнее читайте в статье «Как работают конденсаторы»). Исходя из этого можно ограничить рост разности потенциалов между концами обмотки двигателя (а, соответственно, и рост разности потенциалов между точками h1, h2 и шинами питания и земли), зашунтировав эту обмотку конденсатором. Это, собственно, и есть второй путь.
Схемы электродвигателей постоянного тока и их характеристики
 Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
Свойства электродвигателей постоянного тока определяются в основном способом включения обмотки возбуждения. В зависимости от этого различают электродвигатели:
1. с независимым возбуждением : обмотка возбуждения питается от постороннего источника постоянного тока (возбудителя или выпрямителя) ,
2. с параллельным возбуждением : обмотка возбуждения подключена параллельно обмотке якоря,
3. с последовательным возбуждением : обмотка возбуждения включена последовательно с обмоткой якоря,
4. со смешанным возбуждением : он имеет две обмотки возбуждения, одна подключена параллельно обмотке якоря, а другая — последовательно с ней.
Все эти электродвигатели имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки возбуждения указанных электродвигателей выполняют так же, как у соответствующих генераторов .
Электродвигатель постоянного тока с независимым возбуждением
В этом электродвигателе (рис. 1, а) обмотка якоря подключена к основному источнику постоянного тока (сети постоянного тока, генератору или выпрямителю) с напряжением U, а обмотка возбуждения — к вспомогательному источнику в напряжением UB. В цепь обмотки возбуждения включен регулировочный реостат Rрв, а в цепь обмотки якоря — пусковой реостат Rn.
Регулировочный реостат служит для регулирования частоты вращения якоря двигателя, а пусковой — для ограничения тока в обмотке якоря при пуске. Характерной особенностью электродвигателя является то, что его ток возбуждения Iв не зависит от тока Iя в обмотке якоря (тока нагрузки). Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя Ф не зависит от нагрузки. Зависимости электромагнитного момента М и частоты вращения n от тока Iя будут линейными (рис. 2, а). Следовательно, линейной будет и механическая характеристика двигателя — зависимость п (М) (рис. 2, б).
При отсутствии в цепи якоря реостата с сопротивлением Rn скоростная и механическая характеристики будут жесткими, т. е. с малым углом наклона к горизонтальной оси, так как падение напряжения IяΣRя в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3—5 % от Uном. Эти характеристики (прямые 1 на рис. 2, а и б) называются естественными. При включении в цепь якоря реостата с сопротивлением Rn угол наклона этих характеристик возрастает, вследствие чего можно получить семейство реостатных характеристик 2, 3 и 4, соответствующих различным значениям Rn1, Rn2 и Rn3.
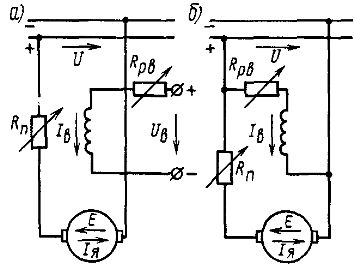
Рис. 1. Принципиальные схемы электродвигателей постоянного тока с независимым (а) и параллельным (б) возбуждением
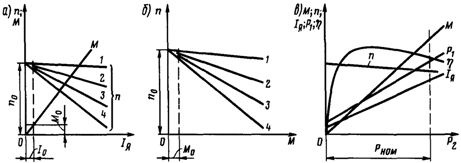
Рис. 2. Характеристики электродвигателей постоянного тока с независимым и параллельным возбуждением : а — скоростные и моментная, б — механические, в — рабочие Чем больше сопротивление Rn, тем больший угол наклона имеет реостатная характеристика, т. е. тем она мягче.
Регулировочный реостат Rpв позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. При этом будет изменяться и частота вращения n.
В цепь обмотки возбуждения никаких выключателей и предохранителей не устанавливают, так как при разрыве этой цепи резко уменьшается магнитный поток электродвигателя (в нем остается лишь поток от остаточного магнетизма) и возникает аварийный режим. Если электродвигатель работает при холостом ходе или небольшой нагрузке на валу, то частота вращения резко возрастает (двигатель идет вразнос). При этом сильно увеличивается ток в обмотке якоря Iя и может возникнуть круговой огонь. Во избежание этого защита должна отключить электродвигатель от источника питания.
Резкое увеличение частоты вращения при обрыве цепи обмотки возбуждения объясняется тем, что в этом случае резко уменьшаются магнитный поток Ф (до значения потока Фост от остаточного магнетизма) и э. д. с. Е и возрастает ток Iя. А так как приложенное напряжение U остается неизменным, то частота вращения n будет увеличиваться до тех пор, пока э. д. с. Е не достигнет значения, приблизительно равного U (что необходимо для равновесного состояния электрической цепи якоря, при котором E= U — IяΣRя.
При нагрузке на валу, близкой к номинальной, электродвигатель в случае разрыва цепи возбуждения остановится, так как электромагнитный момент, который может развить двигатель при значительном уменьшении магнитного потока, уменьшается и станет меньше нагрузочного момента на валу. В этом случае так же резко увеличивается ток Iя, и машина должна быть отключена от источника питания.
Следует отметить, что частота вращения n0 соответствует идеальному холостому ходу, когда двигатель не потребляет из сети электрической энергии и его электромагнитный момент равен нулю. В реальных условиях в режиме холостого хода двигатель потребляет из сети ток холостого хода I0, необходимый для компенсации внутренних потерь мощности, и развивает некоторый момент M0, требуемый для преодоления сил трения в машине. Поэтому в действительности частота вращения при холостом ходе меньше n0.
Зависимость частоты вращения n и электромагнитного момента М от мощности Р2 (рис. 2, в) на валу двигателя, как следует из рассмотренных соотношений, является линейной. Зависимости тока обмотки якоря Iя и мощности Р1 от Р2 также практически линейны. Ток Iя и мощность Р1 при Р2 = 0 представляют собой ток холостого хода I0 и мощность Р0, потребляемую при холостом ходе. Кривая к. п. д. имеет характер, общий для всех электрических машин.
Электродвигатель постоянного тока с параллельным возбуждением
В этом электродвигателе (см. рис. 1, б) обмотки возбуждения и якоря питаются от одного и того же источника электрической энергии с напряжением U. В цепь обмотки возбуждения включен регулировочный реостат Rpв, а в цепь обмотки якоря — пусковой реостат Rп.
В рассматриваемом электродвигателе имеет место, по существу, раздельное питание цепей обмоток якоря и возбуждения, вследствие чего ток возбуждения Iв не зависит от тока обмотки якоря Iв. Поэтому электродвигатель с параллельным возбуждением будет иметь такие же характеристики, как и двигатель с независимым возбуждением. Однако двигатель с параллельным возбуждением работает нормально только при питании от источника постоянного тока с неизменным напряжением.
При питании электродвигателя от источника с изменяющимся напряжением (генератор или управляемый выпрямитель) уменьшение питающего напряжения U вызывает соответствующее уменьшение тока возбуждения Iв и магнитного потока Ф, что приводит к увеличению тока обмотки якоря Iя. Это ограничивает возможность регулирования частоты вращения якоря путем изменения питающего напряжения U. Поэтому электродвигатели, предназначенные для питания от генератора или управляемого выпрямителя, должны иметь независимое возбуждение.
Электродвигатель постоянного тока с последовательным возбуждением
Для ограничения тока при пуске в цепь обмотки якоря включен пусковой реостат Rп (рис. 3, а), а для регулирования частоты вращения параллельно обмотке возбуждения может быть включен регулировочный реостат Rрв.
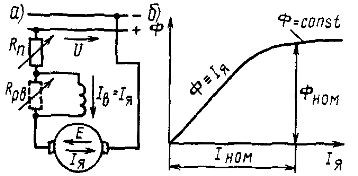
Рис. 3. Принципиальная схема электродвигателя постоянного тока с последовательным возбуждением (а) и зависимость его магнитного потока Ф от тока Iя в обмотке якоря (б)
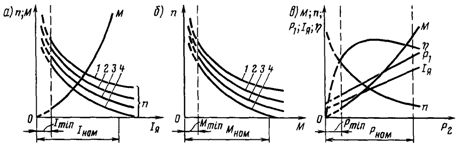
Рис. 4. Характеристики электродвигателя постоянного тока с последовательным возбуждением: а — скоростные и моментная, б — механические, в — рабочие.
Характерной особенностью этого электродвигателя является то, что его ток возбуждения Iв равен или пропорционален (при включении реостата Rpв) току обмотки якоря Iя, поэтому магнитный поток Ф зависит от нагрузки двигателя (рис. 3, б).
При токе обмотки якоря Iя, меньшем (0,8—0,9) номинального тока Iном магнитная система машины не насыщена и можно считать, что магнитный поток Ф изменяется прямо пропорционально току Iя. Поэтому скоростная характеристика электродвигателя будет мягкая — с увеличением тока Iя частота вращения n будет резко уменьшаться (рис. 4, а). Уменьшение частоты вращения n, происходит из-за увеличения падения напряжения IяΣRя. во внутреннем сопротивлении Rя. цепи обмотки якоря, а также из-за увеличения магнитного потока Ф.
Электромагнитный момент М при увеличении тока Iя будет резко возрастать, так как в этом случае увеличивается и магнитный поток Ф, т. е. момент М будет пропорционален току Iя. Поэтому при токе Iя, меньшем (0,8 Н- 0,9) Iном, скоростная характеристика имеет форму гиперболы, а моментная — параболы.
При токах Iя > Iном зависимости М и п от Iя линейны, так как в этом режиме магнитная цепь будет насыщена и магнитный поток Ф при изменении тока Iя меняться не будет.
Механическая характеристика, т. е. зависимость n от М (рис. 4, б), может быть построена на основании зависимостей n и М от Iя. Кроме естественной характеристики 1, можно путем включения в цепь обмотки якоря реостата с сопротивлением Rп получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям Rn1, Rn2 и Rn3, при этом чем больше Rn, тем ниже располагается характеристика.
Механическая характеристика рассматриваемого двигателя мягкая и имеет гиперболический характер. При малых нагрузках магнитный поток Ф сильно уменьшается, частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет вразнос). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.).
Обычно минимально допустимая нагрузка для двигателей большой и средней мощности составляет (0,2 …. 0,25) Iном. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой), применение ременной передачи или фрикционной муфты недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют, особенно там, где имеют место изменения нагрузочного момента в широких пределах и тяжелые условия пуска: во всех тяговых приводах (электровозы, тепловозы, электропоезда, электрокары, электропогрузчики и пр.), а также в приводах грузоподъемных механизмов (краны, лифты и пр.).
Объясняется это тем, что при мягкой характеристике увеличение нагрузочного момента приводит к меньшему возрастанию тока и потребляемой мощности, чем у двигателей с независимым и параллельным возбуждением, поэтому двигатели с последовательным возбуждением лучше переносят перегрузки. Кроме того, эти двигатели имеют большой пусковой момент, чем двигатели с параллельным и независимым возбуждением, так как при увеличении тока обмотки якоря при пуске соответственно увеличивается и магнитный поток.
Если принять, например, что кратковременный пусковой ток может в 2 раза превышать номинальный рабочий ток машины, и пренебречь влиянием насыщения, реакцией якоря и падением напряжения в цепи его обмотки, то в двигателе с последовательным возбуждением пусковой момент будет в 4 раза больше номинального (в 2 раза увеличиваются и ток, и магнитный поток), а в двигателях с независимым и параллельным возбуждением — только в 2 раза больше.
В действительности из-за насыщения магнитной цепи магнитный поток не увеличивается пропорционально току, но все же пусковой момент двигателя с последовательным возбуждением при прочих равных условиях будет значительно больше пускового момента такого же двигателя с независимым или параллельным возбуждением.
Зависимости n и М от мощности Р2 на валу электродвигателя (рис. 4, в), как следует из рассмотренных выше положений, являются нелинейными, зависимости P1, Iя и η от Р2 имеют такую же форму, как и у двигателей с параллельным возбуждением.
Электродвигатель постоянного тока со смешанным возбуждением
В этом электродвигателе (рис. 5, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения — параллельной (или независимой) и последовательной, по которым проходят токи возбуждения Iв1 и Iв2 = Iя

где Фпосл — магнитный поток последовательной обмотки, зависящий от тока Iя, Фпар — магнитный поток параллельной обмотки, который не зависит от нагрузки (определяется током возбуждения Iв1).
Механическая характеристика электродвигателя со смешанным возбуждением (рис. 5, б) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения магнитодвижущих сил параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристики двигателя со смешанным возбуждением к характеристике 1 (кривая 3 при малой м. д. с. последовательной обмотки) или к характеристике 2 (кривая 4 при малой м. д. с. параллельной обмотки).
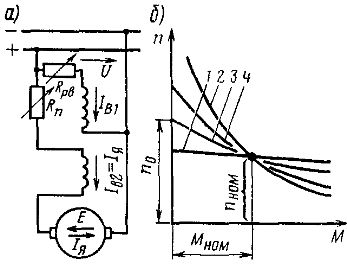
Рис. 5. Принципиальная схема электродвигателя со смешанным возбуждением (а) и его механические характеристики (б)
Достоинством двигателя постоянного тока со смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, когда Фпосл=0. В этом режиме частота вращения его якоря определяется магнитным потоком Фпар и имеет ограниченное значение (двигатель не идет вразнос).