Схема контроллера электрического двигателя
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
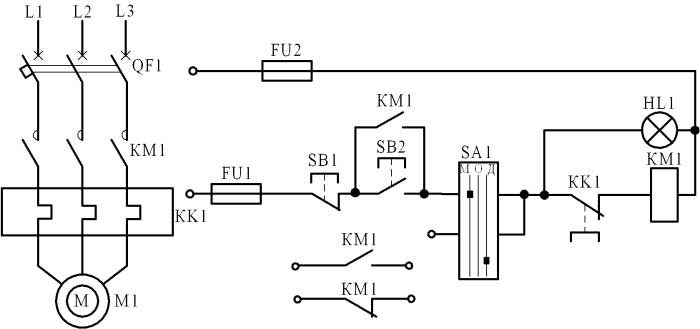
Схема Управления Электрическим Двигателем
После восстановления нормального напряжения самопроизвольного пуска двигателя не произойдет. Типовые схемы управления АДс фазным ротором.

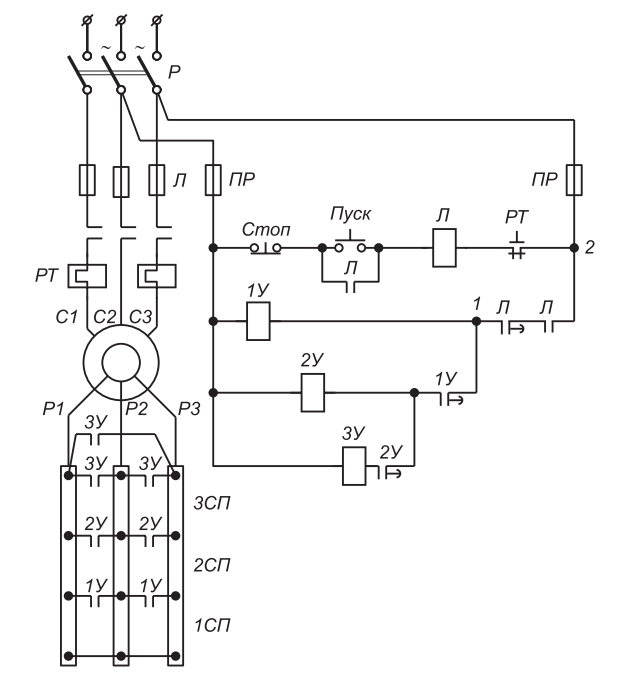
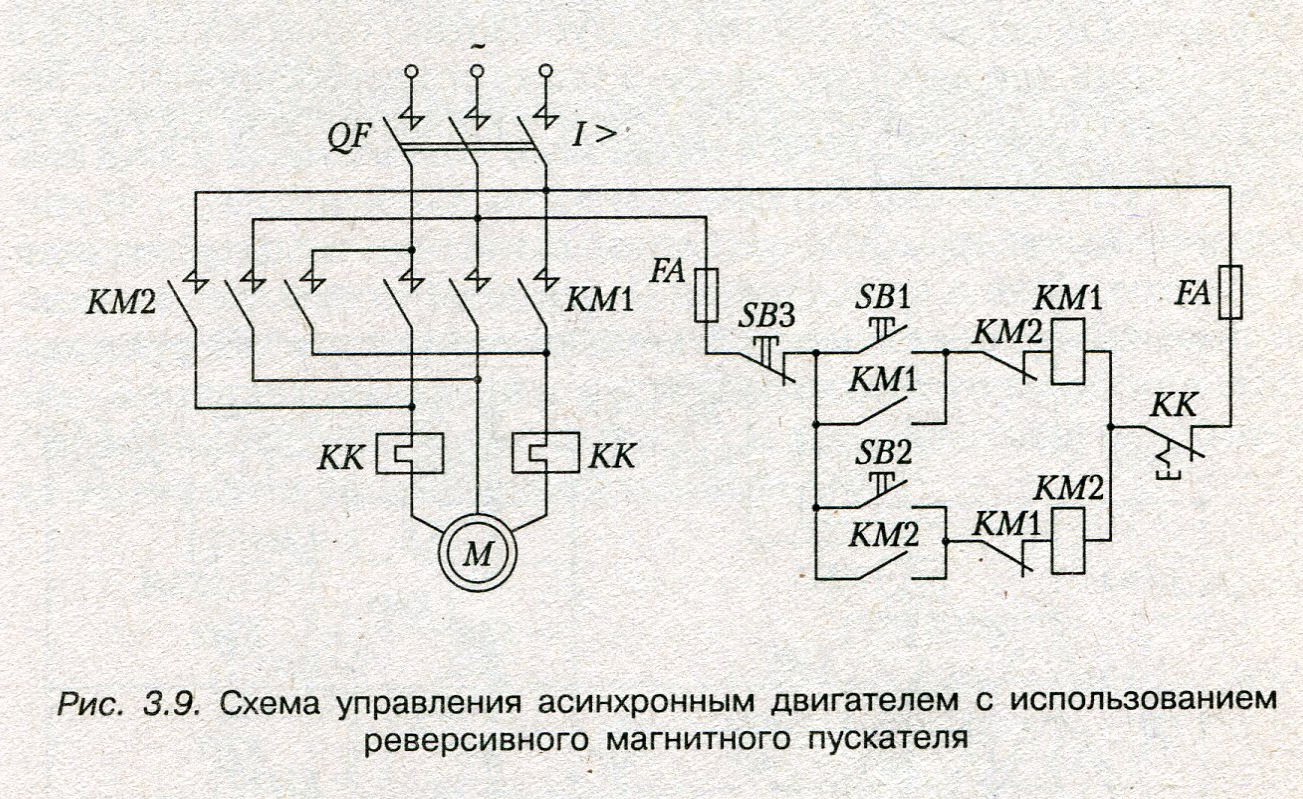
Схема управления асинхронным двигателем с использованием динамического торможения. 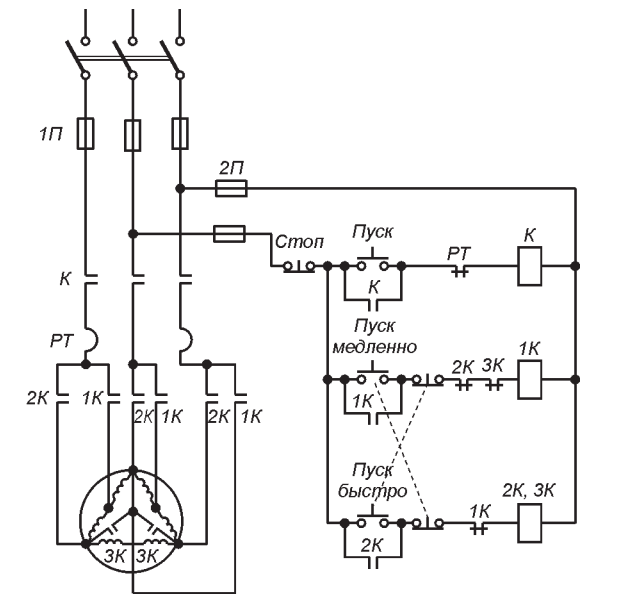
Переключение обмотки на роторе происходит при помощи графитовых щеток, единовременно под напряжением находится только одна из рамок, с магнитным полем, перпендикулярным полю статорной обмотки. При достижении заданного уровня реле снова сработает и разомкнет контакт РДmax.
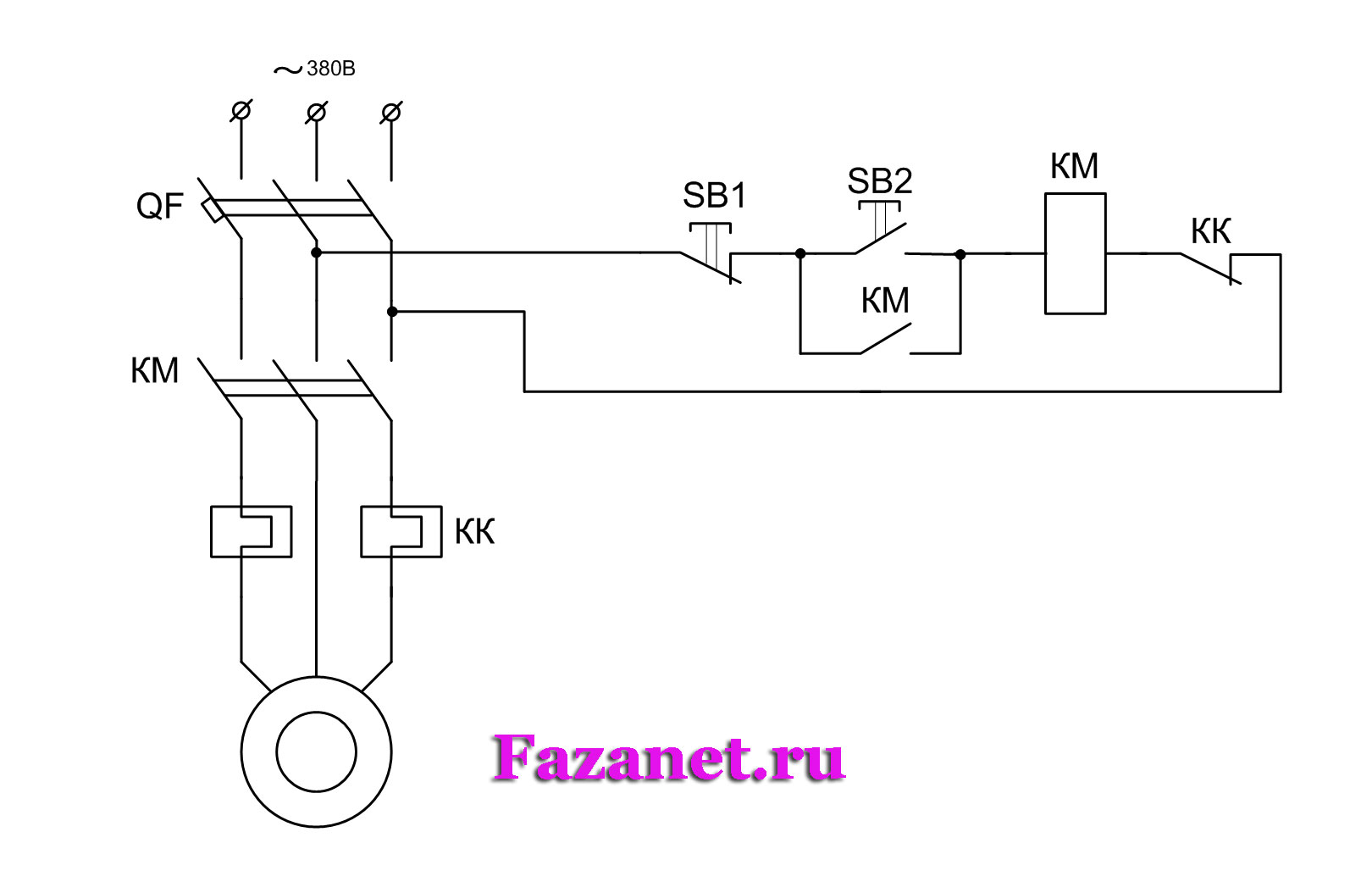
Схемы управления магнитным пускателем
Контактор К обеспечивает минимальную защиту по напряжению.

Остановка двигателя производится нажатием кнопки SВ3, что вызовет отключение всех контакторов от сети и торможение двигателя выбегом.
Начинается процесс торможения двигателя выбегом под действием момента нагрузки на его валу. На рис.
Это асинхронные двигатели с однофазным или трехфазным питанием и коллекторные устройства.
Сервопривод Устройство позволяет точно контролировать угловое положение, скорость и ускорение исполнительного механизма посредством управления синхронным электродвигателем обычно СДПМ. Регулирование скорости рабочего органа машины или механизма.

схема подключения двигателя по реверсивной схеме
Наша группа «ВКонтакте»
К недостаткам можно отнести риск короткого замыкания при подаче на два входа; двойным H-мостом, собранным на маломощной микросхеме. Но реле не сразу отпускает свой якорь, это произойдет после истечения выдержки времени. Автоматический выключатель F1 исключает возможность обрыва одной фазы от срабатывания защиты при однофазном коротком замыкании, как это бывает при установке предохранителей рис. 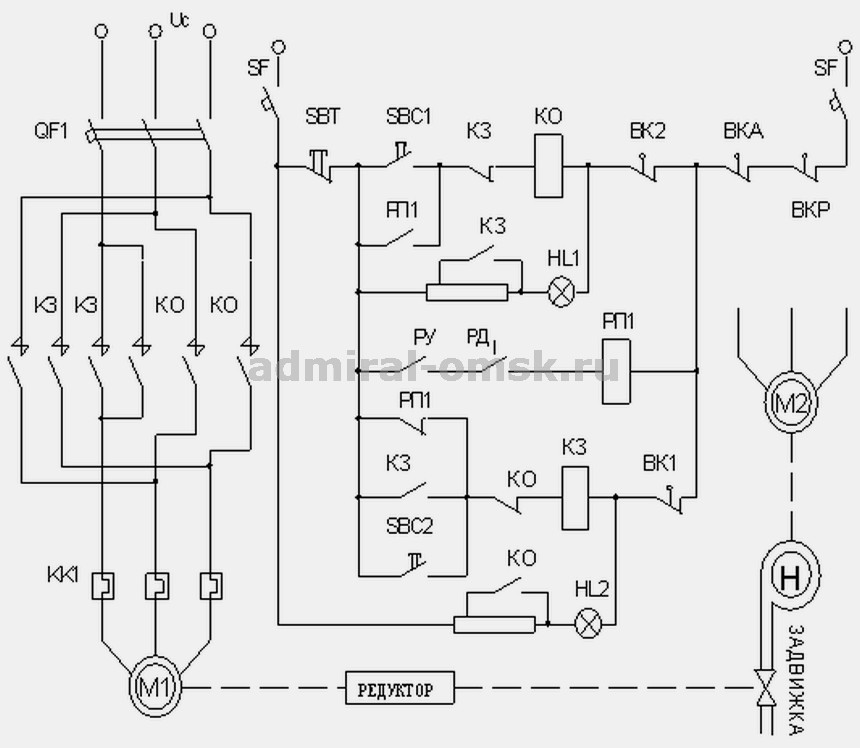
Принципы действия схем см. При перегрузках в цепи двигателя возникает повышенный ток, который проходит через тепловые реле РТ1, РТ2. 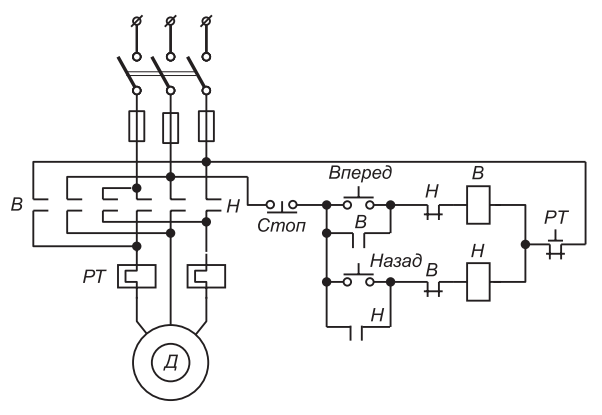
Схема возвращается в исходное положение. 
Именно этот способ сочетает в себе легкость выполнения и достаточные показатели мощности, но не предполагает одновременную подачу на две единицы. Одновременно срабатывает реле Р7, которое своим контактом запитывает соленоидный вентиль СВ — происходит сообщение полости компрессора с магистралью. 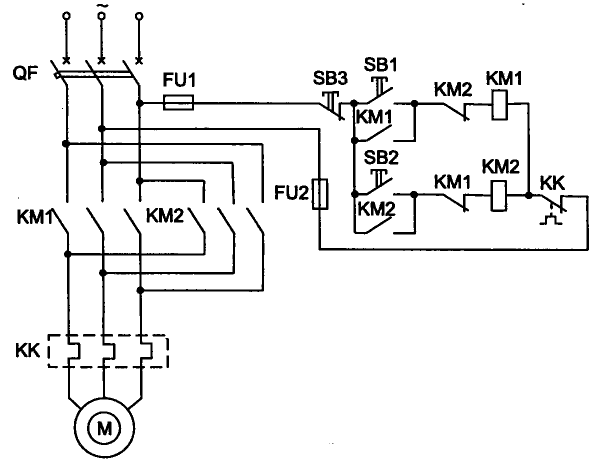
Из схемы следует, что в цепь контактора К включен резистор Rэ, он уменьшает напряжение на катушке К и тем самым уменьшает ее нагрев после срабатывания контактора напряжение на нем можно понизить. Фото схем электродвигателя Типовые конфигурации и принципы действия электродвигателей Есть два наиболее распространенных вида моторов, подключение которых можно выполнить без дополнительных деталей. 
Шаговый режим работы двигателя создает благоприятные условия наладки. 
Проверка проводных выходов и корпуса на короткое замыкание — застрахует от аварий.
Определение начала и конца обмоток трехфазного электродвигателя (простой способ)
Типовые схемы управления электроприводами с асинхронными двигателями
В асинхронных однофазных двигателях обмотка на роторе короткозамкнутая, по конструкции напоминающая колесо для белки. 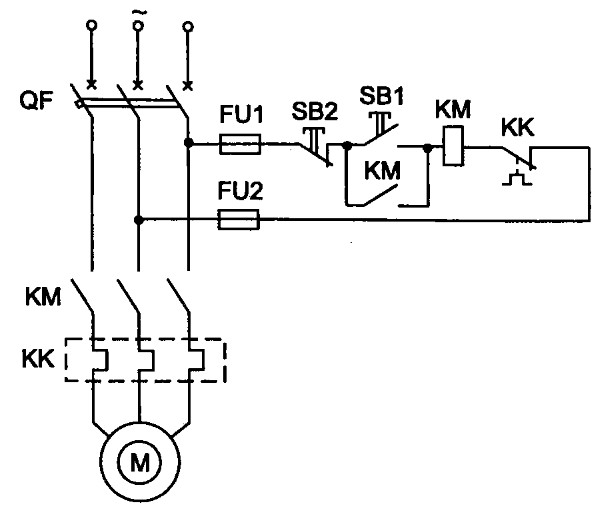
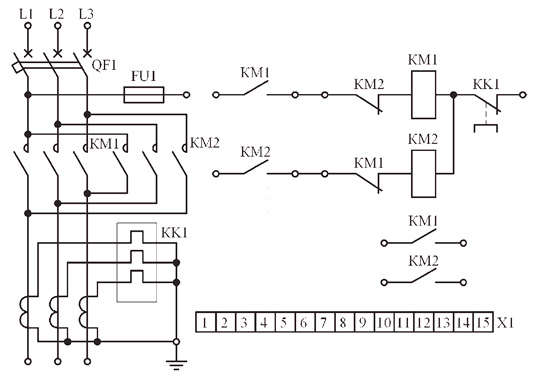
Для отключения двигателя нажимается кнопка остановки SВ2, контактор КМ теряет питание и отключает двигатель от сети. Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. 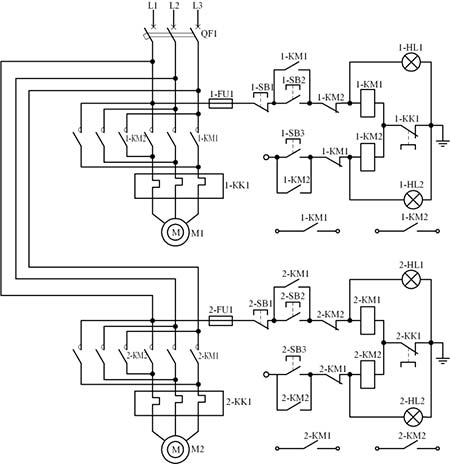
При этом отключается и выключатель М2. Для управления приводами применяются электрические коммутационные аппараты, такие как автоматические и неавтоматические выключатели, контакторы и магнитные пускатели. 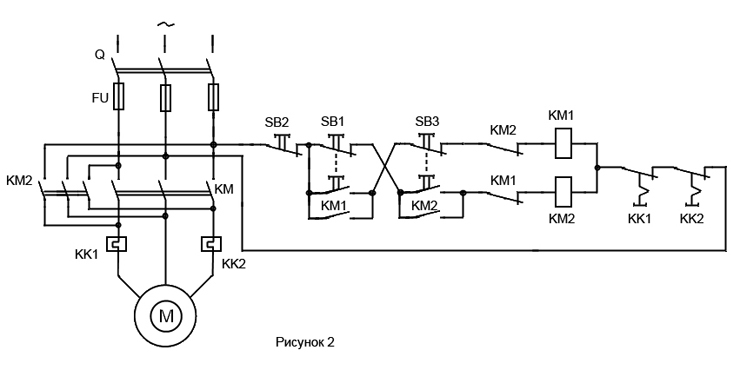
Схемы автоматизированного управления На рис. Электрические блокировки для предотвращения одновременного включения двух контакторов осуществляются с помощью размыкающих контактов КM1 и КM2 рисунок 6, б. Вторым замкнувшимся контактом Р1 включается электромагнитный клапан продувания ЭМП. 
Воздушный зазор между индуктором и якорем составляет всего 1 мм. В нормальном отключенном состоянии ротор электродвигателя расторможен под действием пружинного привода. Точка П является точкой трогания. В случае остановки электродвигателя М1 этот же контакт произведет автоматическое отключение двигателя М2.
Поиск по блогу

При перегрузках реле максимального тока РМ срабатывает и своим контактом выключает Л1, Л2. Схема одноступенчатого пуска АД в функции тока и динамического торможения в функции частоты вращения Схема рис.
Эта защита называется нулевой или нулевым блокированием. При снижении уровня жидкости в расходной цистерне ниже минимального замыкается реле РДmin.
При необходимости самостоятельного пуска электродвигателя при опробовании механизма в цепи управления имеется выключатель Q3, который необходимо предварительно замкнуть. На фото — схема подключения такого электродвигателя к питанию В через простой замыкающий выключатель. Главными недостатками асинхронных двигателей с короткозамкнутым ротором являются большие пусковые токи в раз больше номинального и невозможность простыми методами плавно изменять скорость вращения двигателей.
Схема управления двигателем с двух и трех мест
Схемы управления электроприводами
Cхема электропривода холодильной фреоновой установки На рис.
В случае, если одна из электрифицированных задвижек окажется неисправной, промежуточное реле PIT разрывает цепи автоматического управления насосными агрегатами гидроэлеваторов.
Для подключения к сети с одной фазой необходимо наличие переходного конденсатора, но в этом случае будут потери мощности и скорости оборотов двигателя. На выходе логической схемы включены командные реле, которые подают команды в схему управления электроприводами механизмов автоматического штабелера. В конце торможения, когда частота вращения будет близка к нулю и ЭДС ротора уменьшится, реле КV отключится и своим размыкающим контактом разомкнет цепь катушки контактора КМ2.
Но эти аппараты при своей простоте и надежности являются аппаратами ручного управления. Двигатель получает пониженное напряжение. При этом отключается и выключатель М2. При отключении обмоток статора от сети ротор электродвигателя с рабочим механизмом, например дисковой пилой шпалорезного станка, продолжает сравнительно долгое время вращаться по инерции.
Эти схемы нашли широкое применение для управления нереверсивными электроприводами транспортеров, воздуходувок, вентиляторов, насосов, лесоперерабатывающих и заточных станков. После запуска двигателя M1 должны установиться нормальные параметры рассола и охлаждающей воды, о чем сигнализируют контакты: ДТР датчик температуры рассола ; РР реле расхода рассола ; РД реле давления, размыкает свой контакт в том случае, если давление в магистрали слишком понизится или повысится. В дополнение к механической блокировке в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Если температура в помещениях поднимается выше установленной, замыкается контакт ДОТ, срабатывает реле Р2 и происходит пуск компрессора.
При нажатии каждой из кнопок цепь одного из пускателей замыкается, а цепь другого одновременно при этом размыкается. В соответствии с правилами технической эксплуатации грузоподъемных механизмов в отключенном состоянии привод и механизм подъема должны быть надежно заторможены. Схема включает блок управления тиристорами БУ и релейно-контактный узел управления. Нажатие кнопки SВ2 приводит одновременно к замыканию цепи питания катушки контактора КМ2, который, включившись, вновь подключает двигатель к сети, но уже с другим чередованием фаз сетевого напряжения на статоре. Пуск начинается после перемещения контактной щетки на вывод 1.
Также рекомендуем прочесть
Анимация процессов, протекающих в схеме с двумя пускателями показана ниже. Статор электродвигателя и обмотка электромагнита Y одновременно будут присоединены к сети. Для этого в цепь управления магнитного пускателя КМ2, осуществляющего пуск и остановку электродвигателя М2, включен замыкающий вспомогательный контакт КМ1, связанный с пускателем КМ1. Это позволяет снизить расход электроэнергии и износ мотора, предотвращает перегрев и дает ряд дополнительных возможностей для подключения автоматики.
Одновременно НО контакт реле РП сигнализирует на диспетчерский пункт. Для его ускорения ванну печи поворачивают относительно оси на 40 влево и вправо и в каждом из крайних положений производят проплавле-ние новых колодцев, что в конечном итоге приводит к обвалу шихты в печи и ускорению наиболее тяжелого с энергетической точки зрения режима расплавления шихты. При нажатии на кнопку первым отключается размыкающий контакт, а затем включается замыкающий. В этом случае он подключается от двух любых фаз, например, от А и B. Переключатель может иметь несколько положений для выбора различных способов подключения электродвигателя, что может позволить уменьшить пусковое напряжение, выбирать направление и скорость вращения.
Как читать Элекрические схемы