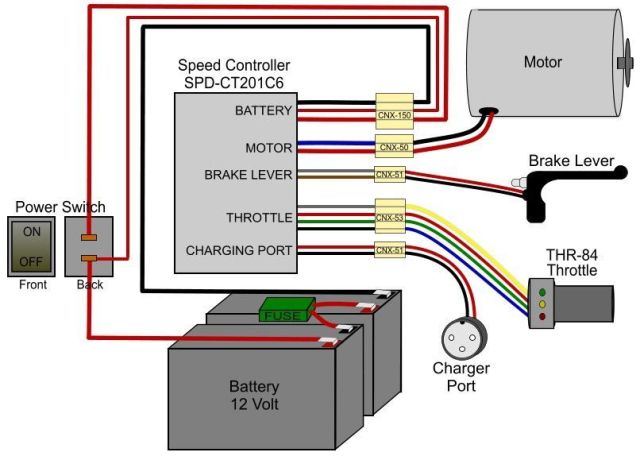
Схема контроллера двигателя самоката
Дельта принтеры крайне требовательны к точности изготовления комплектующих (геометрия рамы, длины диагоналей, люфтам соединения диагоналей, эффектора и кареток) и всей геометрии принтера. Так же, если концевые выключатели (EndStop) расположены на разной высоте (или разный момент срабатывания в случае контактных концевиков), то высота по каждой из осей оказывается разная и мы получаем наклонную плоскость не совпадающая с плоскостью рабочего столика(стекла). Данные неточности могут быть исправлены либо механически (путем регулировки концевых выключателей по высоте), либо программно. Мы используем программный способ калибровки.
Далее будут рассмотрены основные настройки дельта принтера.
Для управления и настройки принтера мы используем программу Pronterface.
Калибровка принтера делится на три этапа:
1 Этап. Корректируем плоскость по трем точкам
Выставление в одну плоскость трех точек — A, B, C (расположенных рядом с тремя направляющими). По сути необходимо уточнить высоту от плоскости до концевых выключателей для каждой из осей.
Большинство (если не все) платы для управления трехмерным принтером (В нашем случае RAMPS 1.4) работают в декартовой системе координат, другими словами есть привод на оси: X, Y, Z.
В дельта принтере необходимо перейти от декартовых координат к полярным. Поэтому условимся, что подключенные к двигателям X, Y, Z соответствует осям A, B, C.(Против часовой стрелки начиная с любого двигателя, в нашем случае смотря на логотип слева — X-A, справа Y-B, дальний Z-C) Далее при слайсинге, печати и управлении принтером в ручном режиме, мы будем оперировать классической декартовой системой координат, электроника принтера сама будет пересчитывать данные в нужную ей систему. Это условность нам необходима для понятия принципа работы и непосредственной калибровки принтера. 
Точки, по которым мы будем производить калибровку назовем аналогично (A, B, C) и позиция этих точек равна A= X-52 Y-30; B= X+52 Y-30; C= X0 Y60. 
Алгоритм настройки:
- Подключаемся к принтеру. (В случае “крагозяб” в командной строке, необходимо сменить скорость COM порта. В нашем случае с 115200 на 250000 и переподключится)

После чего мы увидим все настройки принтера. - Обнуляем высоты осей X, Y, Z командой M666 x0 y0 z0.
И сохраняем изменения командой M500. После каждого изменения настроек необходимо нажать home (или команда g28), для того что бы принтер знал откуда брать отсчет. - Калибровка принтера производится “на горячую”, то есть должен быть включен подогрев стола (если имеется) и нагрев печатающей головки (HotEnd’а) (Стол 60град., сопло 185 град.) Так же нам понадобится щуп, желательно металлический, известных размеров. Для этих задач вполне подойдет шестигранный ключ (самый большой, в нашем случае 8мм, он предоставляется в комплекте с принтерами Prizm Pro и Prizm Mini)
- Опускаем печатающую головку на высоту (условно) 9мм (от стола, так, что бы сопло еле касалось нашего щупа, т.к. высота пока что не точно выставлена.) Команда: G1 Z9.
- Теперь приступаем непосредственно к настройке наших трех точек.
Для удобства можно вместо g- команд создать в Pronterface четыре кнопки, для перемещения печатающей головки в точки A, B, C, 0-ноль.


Далее командой меняем параметры высоты оси Y: M666 Y <посчитанная величина>
M666 Y0.75
M500
G28
2 Этап. Исправляем линзу
После того как мы выставили три точки в одну плоскость необходимо произвести коррекцию высоты центральной точки. Из за особенности механики дельты при перемещении печатающей головки между крайними точками в центре она может пройти либо ниже либо выше нашей плоскости, тем самым мы получаем не плоскость а линзу, либо вогнутую либо выпуклую. 
Корректируется этот параметр т.н. дельта радиусом, который подбирается экспериментально.
Калибровка:
- Отправляем головку на высоту щупа в любую из трех точек стола. Например G1 Z9 X-52 Y-30
- Сравниваем высоту центральной точки и высоту точек A,B,C. (Если высота точек A, B, C разная, необходимо вернутся к предыдущей калибровки.)
- Если высота центральной точки больше остальных, то линза выпуклая и необходимо увеличить значение дельта радиуса. Увеличивать или уменьшать желательно с шагом +-0,2мм, при необходимости уменьшить или увеличить шаг в зависимости от характера и величины искривления (подбирается экспериментально)
- Команды:
G666 R67,7
M500
G28 - Подгоняем дельта радиус пока наша плоскость не выровняется
3 Этап. Находим истинную высоту от сопла до столика
Третьим этапом мы подгоняем высоту печати (от сопла до нижней плоскости — столика) Так как мы считали, что общая высота заведомо не правильная, необходимо ее откорректировать, после всех настроек высот осей. Можно пойти двумя путями решения данной проблемы:
1 Способ:
Подогнав вручную наше сопло под щуп, так что бы оно свободно под ним проходило, но при этом не было ощутимого люфта,
- Командой M114 выводим на экран значение фактической высоты нашего HotEnd’а
- Командой M666 L получаем полное значение высоты (Параметр H)
- После чего вычитаем из полной высоты фактическую высоту.
- Получившееся значение вычитаем из высоты щупа.
Таким образом мы получаем величину недохода сопла до нижней плоскости, которое необходимо прибавить к полному значению высоты и и записать в память принтера командами:
G666 H 235.2
M500
G28
2 Способ:
Второй способ прост как валенок. С “потолка”, “на глаз” прибавляем значение высоты (после каждого изменение не забываем “уходить” в home), добиваясь необходимого значения высоты, но есть шанс переборщить со значениями и ваше сопло с хрустом шмякнется об стекло.
Как сделать авто калибровку для вашего принтера и что при этом авто калибрует принтер вы узнаете из следующих статей.
Как устроен электросамокат
В последнее время в парках и на улицах наших городов, особенно в сухое и теплое время года, можно заметить все больше электрических самокатов. За последние несколько лет они успели превратиться из игрушек в полноценное средство индивидуального передвижения сродни когда-то безальтернативному велосипеду.
На электрическом самокате можно без устали маневрировать по тротуару или даже среди стоящих в пробке автомобилей. На самокате всегда удобно прокатиться через сквер, доехать до работы по кротчайшему пути, при этом не возникнет никаких проблем с поиском места для парковки, как это бывает с мотороллерами. Давайте поговорим об устройстве электрического самоката, обратим внимание на принцип его работы.

Сразу заметим, что полученное представление об общем устройстве электрического самоката не гарантирует, что вы станете специалистом по сервисному обслуживанию данного транспорта. Ремонт в любом случае лучше доверить профессионалам. Разные модели отличаются собственными особенностями конструкции, о которых знают лишь специально обученные опытные мастера.
Для ремонта электрических самокатов есть специализированные сервисные центры, в которые при необходимости и нужно будет обращаться. Так ремонт обойдется меньшими хлопотами и без лишних расходов.
Как и у любого самоката, у электрического самоката всегда есть рама, подошва, ручки и колеса. Но только у электрического самоката под декой установлен аккумулятор. Именно аккумулятор составляет большую часть веса транспортного средства. Безусловно присутствует здесь и двигатель, но о нем будет сказано далее, ибо двигатели у электрических самокатов бывают принципиально разными.

Вообще встречаются два типа электрических самокатов, отличия между которыми заключается именно в типах их моторов: цепные самокаты и самокаты с мотор-колесом. Опционально могут присутствовать и другие части, такие как бортовой компьютер, сиденье, багажник и прочие навороты, призванные повысить комфорт при передвижении.
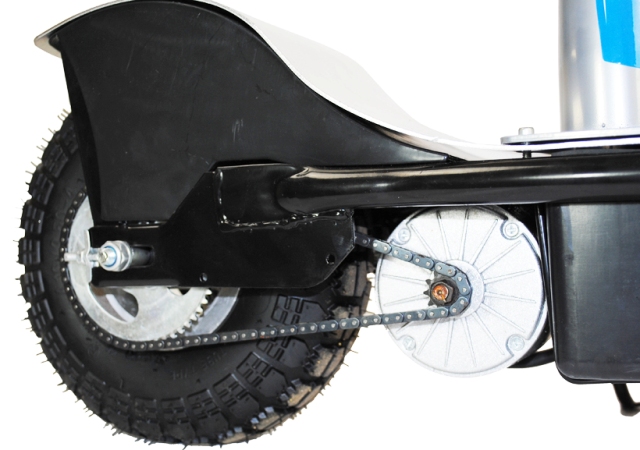
Цепной самокат — классический электросамокат. В нем крутящий момент от двигателя на колесо передается посредством цепной передачи, подобно тому как это реализовано в велосипеде, скутере, мотоцикле.
Самокаты с мотор-колесом более надежны и просты, но самокаты с цепью — мощнее. Вместо цепи может быть натянут ремень, но это частности, которые менее надежны чем модели с цепью.
Именно цепные самокаты обладают достаточной мощностью для езды практически в любых условиях дорожного покрытия. На цепном самокате вы сможете с уверенностью перемещаться как каждый день по городу, так и при необходимости по бездорожью.
В конструкции цепного самоката, недалеко от оси располагаются мотор и редуктор, только за счет них и осуществляется движение транспорта. Цепь передает крутящийся момент на переднее колесо, при этом питающее напряжение подается на мотор через провода. В целях безопасности, двигатель и редуктор заключены в специальный герметичный короб.


Схема электросамоката XIAOMI Mijia M365:
Мотор-колесо — более современное решение для электрического самоката, самокаты с мотор-колесом относятся к среднему классу. Здесь двигатель установлен прямо в одном из колес, либо в обоих колесах установлено по двигателю. Электросамокаты с мотор-колесом имеют преимущества пред цепными. Такой самокат проще в обслуживании, заранее известно что не возникнет никаких проблем с цепью.

Двигатель при необходимости можно легко заменить. Вид самоката с мотор-колесом более эстетичен, вес транспортного средства меньше, однако есть и минус — мощность максимум 500 Вт. По бездорожью уже не покатаешься, так как просто не хватит мощности мотора. Зато для повседневной езды по городу такой самокат идеален.
В зависимости от модели самоката, мощности двигателя и емкости аккумулятора, он может ездить на расстояния от 30 до 50 км.
Все про контроллеры электросамоката | Схема, проверка, ремонт
Электросамокат отличается от обычного самоката наличием дополнительных компонентов. Главные из них – встроенный в колесо бесколлекторный электродвигатель, аккумуляторная батарея и контроллер. Аккумуляторная батарея обеспечивает автономное питание мотора, а коллектор отвечает за его корректное управление и контроль работы. Среди представленных в продаже электронных компонентов есть масса готовых решений, позволяющих снабдить электроприводом как самокат, так и другие виды персонального транспорта.
Предшественники современных контроллеров напоминали массивный реостат. Теперь они компактны, не имеют движущихся элементов и регулируют передачу электроэнергии к двигателю в зависимости от длительности поступающих импульсов. Контроль и управление электросамокатом производится при помощи пульта, закрепленного на руле. Обычно на пульте есть рычаги или кнопки для включения питания и фар, выбора режимов и скорости езды.
На дисплее может отображаться текущая скорость, уровень заряда батареи, пробег и другая информация. При отсутствии дисплея минимальную информацию о работе устройства могут предоставлять светодиодные индикаторы. Многие современные электросамокаты интегрируются со смартфонами, которые берут на себя функции дисплея и пульта управления.
Принцип работы контроллера
Первостепенная задача этого элемента – подавать на электромотор энергию, получаемую от аккумуляторной батареи. Проходящий по обмоткам ток создает магнитное поле, которое взаимодействует с находящимися в мотор-колесе магнитами ротора. В результате колесо приводится в движение, причем частотой вращения управляет контроллер. Принцип работы контроллера электросамоката таков: он принимает сигнал от ручки газа и с учетом продолжительности поступающих импульсов регулирует скорость вращения мотора.
Кроме основной задачи, этот контролирующий и управляющий элемент:
- регулирует скорость вращения электромотора;
- управляет крутящим моментом;
- обеспечивает плавное и мягкое торможение при помощи изменения продолжительности импульсов;
- защищает электродвигатель;
- не допускает глубокой разрядки батареи – выясняет напряжение АКБ и при его критическом снижении отключает мотор от питания;
- при помощи встроенного термодатчика отслеживает температуру и не допускает токовых перегрузок.
Схема подключения и распиновка контроллера электросамоката
К контроллеру подсоединяется электромотор и остальные электрокомпоненты самоката. Для их подключения используются многожильные соединительные провода в термостойкой изоляции из силикона. Совместимость контроллера с электродвигателем и АКБ электросамоката определяется по максимальному току, напряжению батареи и другим рабочим параметрам.
Рассмотрим схему подключения контроллера электросамоката и функции контактов на примере устройства, разработанного для управления трехфазными электромоторами с рабочими параметрами 36 В и 350 Вт. В таблице приведен перечень электрических разъемов контроллера, их назначение и цвета изоляционного покрытия используемых в них проводов.
Подключение к ручкам тормоза и стоп-сигналу. К общему жгуту проводов подключено 2 разъема.