Типовые схемы пуска синхронных электродвигателей
Синхронные двигатели получили широкое распространение в промышленности для электроприводов, работающих с постоянной скоростью (компрессоров, насосов и т.д.). В последнее время, вследствие появления преобразовательной полупроводниковой техники, разрабатываются регулируемые синхронные электроприводы.
Достоинства синхронных электродвигателей
Синхронный двигатель несколько сложнее, чем асинхронный, но обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного.
1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии , который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности ( cos фи) равным единице.Если для предприятия необходима выработка реактивной энергии, то с и нхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть.
2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения.
3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя.
4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности.
Способы пуска синхронного электродвигателя
Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через реактор или автотрансформатор.
Пуск синхронного двигателя осуществляется как пуск асинхронного. Собственный пусковой момент синхронной машины мал, а у неявнополюсной равен нулю. Для создания асинхронного момента ротор снабжается пусковой беличьей клеткой, стержни которой закладываются в пазы полюсной системы. (В явнополюсном двигателе стержни между полюсами, естественно, отсутствуют.) Эта же клетка способствует повышению динамической устойчивости двигателя при набросах нагрузки.
За счет асинхронного момента двигатель трогается и разгоняется. Ток возбуждения в обмотке ротора при разгоне отсутствует. Машина пускается невозбужденной, так как наличие возбужденных полюсов осложнило бы процесс разгона, создавая тормозной момент, аналогичный моменту асинхронного двигателя при динамическом торможении.
При достижении так называемой подсинхронной скорости, отличающейся от синхронной на 3 — 5%, подается ток в обмотку возбуждения и двигатель после нескольких колебаний около положения равновесия втягивается в синхронизм. Явнополюсные двигатели за счет реактивного момента при малых моментах на валу иногда втягиваются в синхронизм без подачи тока в обмотку возбуждения.
В синхронных двигателях трудно одновременно обеспечить необходимые значения пускового момента и входного момента под которым понимают асинхронный момент, развиваемый при достижении скоростью 95% синхронной. В соответствии с характером зависимости статического момента от скорости, т.е. в соответствии с типом механизма, для которого предназначен двигатель, на электромашиностроительных заводах приходится варьировать параметры пусковой клетки.
Иногда для ограничения токов при пуске мощных двигателей уменьшают напряжение на зажимах статора, включая последовательно обмотки автотрансформатора или резисторы. Следует иметь в виду, что при пуске синхронного двигателя цепь обмотки возбуждения замыкается на большое сопротивление, превышающее сопротивление самой обмотки в 5 — 10 раз.
В противном случае под действием токов, наводимых в обмотке при пуске, возникает пульсирующий магнитный поток, обратная составляющая которого, взаимодействуя с токами статора, создает тормозной момент. Этот момент достигает максимального значения при скорости, несколько превышающей половину номинальной, и под его влиянием двигатель может приостановить разгон на этой скорости. Оставлять на время пуска цепь возбуждения разорванной опасно, так как возможно повреждение изоляции обмотки индуцируемыми в ней ЭДС.

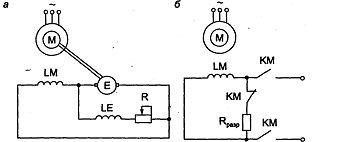
Асинхронный пуск синхронного электродвигателя
Схема возбуждения синхронного двигателя с глухоподключенным возбудителем довольно проста и может применяться в том случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс
Асинхронный пуск синхронного двигателя производится присоединением статора к сети. Двигатель разгоняется как асинхронный до скорости вращения, близкой к синхронной.
В процессе асинхронного пуска обмотка возбуждения замыкается на разрядное сопротивление, чтобы избежать пробоя обмотки возбуждения при пуске, так как при малой скорости ротора в ней могут возникнуть значительные перенапряжения. При скорости вращения, близкой к синхронной, срабатывает контактор КМ (цепь питания контактора на схеме не показана), обмотка возбуждения отключается от разрядного сопротивления и подключается к якорю возбудителя. Пуск заканчивается.
Слабым местом большинства электроприводов с синхронными двигателям, значительно усложняющим эксплуатацию и повышающим затраты, многие годы являлся электромашинный возбудитель. В настоящее время широкое распространение для возбуждения синхронных двигателей находят тиристорные возбудители . Они поставляются в комплектном виде.
Тиристорные возбудители синхронных электродвигателей более надежны и имеют более высокий к.п.д. по сравнению с электромашинными возбудителями. С их помощью легко решаются вопросы оптимального регулирования тока возбуждения для поддержания постоянства cos фи, напряжения на шинах, от которых питается синхронный двигатель, а также ограничение токов ротора и статора синхронного двигателя в аварийных режимах.
Тиристорными возбудителями комплектуется большинство выпускаемых крупных синхронных электродвигателей. Они выполняют обычно следующие функции:
- пуск синхронного двигателя с включенным в цепь обмотки возбуждения пусковым резистором,
- бесконтакное отключение пускового резистора после окончания пуска синхронного двигателя и защиту его от перегрева,
- автоматическую подачу возбуждения в нужный момент пуска синхронного электродвигателя,
- автоматическое и ручное регулирование тока возбуждения
- необходимую форсировку возбуждения при глубоких посадках напряжения на статоре и резких набросах нагрузки на валу синхронного двигателя,
- быстрое гашение поля синхронного двигателя при необходимости снижения тока возбуждения и отключениях электродвигателя,
- защиту ротора синхронного двигателя от длительной перегрузки по току и коротких замыканий.
Если пуск синхронного электродвигателя производится на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора. Возможно подключение обмотки возбуждения двигателя к якорю возбудителя последовательно с разрядным сопротивлением.
Процесс подачи возбуждения синхронному двигателю автоматизируется двумя способами: в функции скорости и в функции тока.
Система возбуждения и устройство управления синхронных двигателей должны обеспечивать:
- пуск, синхронизацию и остановку двигателя (с автоматической подачей возбуждения в конце пуска);
- форсировку возбуждения кратностью не менее 1,4 при снижении напряжения сети до 0,8U н ;
- возможность компенсации двигателем реактивной мощности, потребляемой (отдаваемой) смежными электроприемниками в пределах тепловых возможностей двигателя;
- отключение двигателя при повреждениях в системе возбуждения;
- стабилизацию тока возбуждения с точностью 5% установленного значения при изменении напряжения сети от 0,8 до 1,1;
- регулирование возбуждения по отклонению напряжения статора с зоной нечувствительности 8%;
- при изменении питающего напряжения статора синхронного двигателя от 8 до 20% ток изменяется от установленного значения до 1,4 I н , увеличение тока возбуждения для обеспечения максимальной перегружаемости двигателя.
На схеме, приведенной на рисунке, подача возбуждения синхронному двигателю осуществляется с помощью электромагнитного реле постоянного тока КТ (реле времени с гильзой). Катушка реле включается на разрядное сопротивление Rразр через диод VD. При подключении обмотки статора к сети в обмотке возбуждения двигателя наводится ЭДС. По катушке реле КТ проходит выпрямленный ток, амплитуда и частота импульсов которого зависят от скольжения.
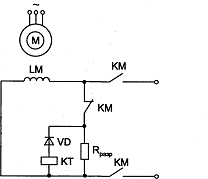
При пуске скольжение S = 1. По мере разгона двигателя оно уменьшается и интервалы между выпрямленными полуволнами тока возрастают; магнитный поток постепенно снижается по кривой Ф(t).
При скорости, близкой к синхронной, магнитный поток реле успевает достигнуть значения потока отпадания реле Фот в момент, когда через реле КТ ток не проходит. Реле теряет питание и своим контактом создает цепь питания контактора КМ (на схеме цепь питания контактора КМ не показана).
Рассмотрим контроль подачи возбуждения в функции тока с помощью реле тока. При пусковом токе срабатывает реле тока КА и размыкает свой контакт в цепи контактора КМ2.
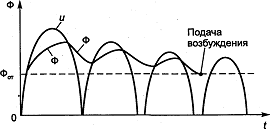
График изменения тока и магнитного потока в реле времени КТ
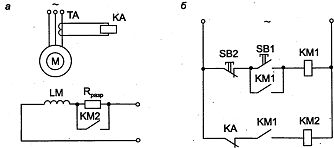
При скорости, близкой к синхронной, реле КА отпадает и замыкает свой контакт в цепи контактора КМ2. Контактор КМ2 срабатывает, замыкает свой контакт в цепи возбуждения машины и шунтирует резистор Rразр.
Синхронный двигатель с постоянными магнитами
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

- Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
- В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


- Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
- Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
- Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
- В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
- Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.