Схемы торможения двигателей постоянного тока
 При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
При остановке и реверсировании двигателей постоянного тока (ДПТ) применяется электрическое (динамическое и противовключением) и механическое торможения. При динамическом торможении схема отключает обмотку якоря от сети и замыкает ее на тормозной резистор с одной или несколькими ступенями. Управление динамическим торможением производится с заданием времени или с контролем скорости.
Для управления моментом ДПТ с заданием времени в режиме динамического торможения применяется узел схемы, приведенный на рис. 1, а, составленный для управления торможением ДПТ с независимым возбуждением с одной ступенью тормозного резистора R2.
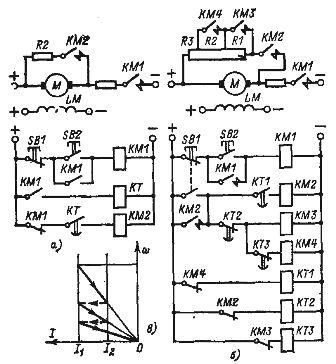
Рис. 1. Схема, осуществляющая одноступенчатое (а) и трехступенчатое (б) динамическое торможение двигателя постоянного тока с управлением по времени и пусковая диаграмма трехступенчатого торможения (в).
Команда на перевод ДПТ в режим динамического торможения в приведенной схеме подается от кнопки SB1. При этом линейный контактор КМ1 отключает якорь двигателя от напряжения сети, а тормозной контактор КМ2 подключает к нему тормозной резистор. Команду на отсчет времени процесса динамического торможения для реле торможения КТ подает линейный контакторам КМ1, выполняющий предыдущую операцию в схеме перед началом динамического торможения. В качестве тормозного реле используется электромагнитное реле времени постоянного тока.
Схема может применяться для управления ДПТ с независимым возбуждением и ДПТ с последовательным возбуждением, но в последнем случае — с реверсом тока в последовательной обмотке возбуждения.
Управление динамическим торможением с заданием времени чаще используется при многоступенчатом торможении, когда применяется несколько реле времени, подающих команды на последовательное выведение ступеней тормозного резистора (как при пуске). Узел такой схемы, составленный для ДПТ с независимым возбуждением с тремя ступенями тормозного резистора, приведен на рис. 1, б.
Последовательное включение ступеней торможения осуществляют контакторы КМ2, КМ3, КМ4, управляемые от электромагнитных реле времени КТ1, КТ2 и КТ3. Управляющая команда на начало торможения в схеме подается кнопкой SB1, которая отключает контактор КМ1 и включает КМ2.
Дальнейшая последовательность включения контакторов КМ3, КМ4 и отключения КМ2 в конце процесса торможения определяется настройкой реле торможения КТ2, КТ3 и КТ1, обеспечивающих переключения при значениях тока I1 и I2, как показано на рис. 1, в. Приведенная схема управления может применяться и для управления двигателем переменного тока в режиме динамического торможения.
При одноступенчатом динамическом торможении наибольшее распространение получило управление моментом с контролем скорости. Узел такой схемы приведен на рис. 2. Контроль скорости осуществляет реле напряжения KV, обмотка которого подключена на якорь ДПТ.
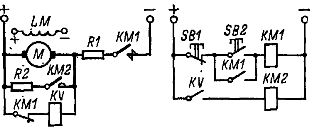
Рис. 2. Схема управления динамическим торможением двигателя постоянного тока с контролем скорости.
Это реле, отключающееся при низкой скорости, подает команду на отключение контактора КМ2 и окончание процесса торможения. Напряжение отпадания реле KV соответствует скорости, составляющей примерно 10—20 % установившегося начального значения:

Практически реле KV настраивается так, чтобы контактор торможения отключался при скорости, близкой к нулю. Так как реле торможения должно отключаться при низких значениях напряжения, то в качестве него выбирается реле напряжения с низким коэффициентом возврата типа РЭВ830.
При торможении двигателей в режиме противовключения, которое чаще всего используется в реверсивных схемах, применение управления с контролем скорости оказывается наиболее простым и надежным.
Узел управления ДПТ СВ в режиме торможения противовключением с одной ступенью тормозного резистора приведен на рис. 3. Тормозной резистор состоит из условно принятой пусковой ступени R2 и ступени противовключения R1. Управляющая команда на реверс с предварительным торможением противовключением в приведенной схеме подается от командоконтроллера SM.
Управление режимом торможения и выдача команды на его окончание производят реле противовключейния KV1 и KV2, в качестве которых используются реле напряжения типа РЭВ821 или РЭВ84. Реле настраиваются на напряжение втягивания из расчета включения его при скорости двигателя, близкой к нулю (15—20 % установившейся скорости):

где Uс — напряжение питающей сети, Rx — часть сопротивления, на которую подключается обмотка реле противовключения (KV1 или KV2), R — полное сопротивление якорной цепи.

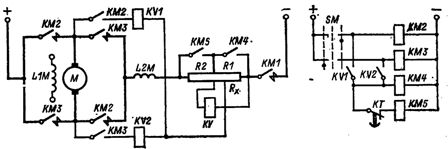
Рис. 4. Узел схемы управлении торможением противовключением двигателя постоянного тока с контролем скорости.
Точка присоединения обмоток реле к пусковому и тормозному резистору, т. е. значение Rx, находится из условия отсутствия напряжения на реле в начале торможения, когда
где ωнач — угловая скорость двигателя в начале торможения.
Отключенное состояние замыкающего контакта реле противовключения в процессе всего периода торможения обеспечивает наличие в якорной цепи ДПТ полного тормозного сопротивления, определяющего допустимый тормозной ток. В конце торможения реле KV1 или KV2, включаясь, подает команду на включение контактора противовключения КМ4 и разрешает начало реверсирования после окончания торможения.
При пуске двигателя реле KV1 или KV2 включается сразу после подачи управляющей команды на пуск двигателя. При этом включается контактор КМ4 и отключает ступень противовключения R1, обмотка реле ускорения КТ шунтируется. По истечении выдержки времени реле КТ замыкается его контакт в цепи катушки контактора КМ5, который, срабатывая, замыкает свой силовой контакт, шунтирующий часть пускового резистора R2, двигатель переходит на естественную характеристику.
При остановке двигателя, особенно в механизмах перемещения и подъема, применяется механическое торможение, осуществляемое колодочным электромагнитным или другим тормозом. Схема включения тормоза приведена на рис. 4. Управление тормозом обеспечивает электромагнит YB, при включении которого тормоз растормаживает двигатель, а при отключении — затормаживает. Для включения электромагнита его обмотка, имеющая обычно большую индуктивность, подключается к напряжению питания контактором с дугогашением, например КМ5.
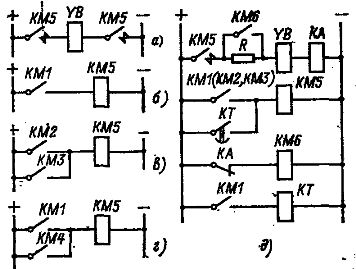
Рис. 4. Узлы схем включения электромагнитного тормоза постоянного тока.
Включается и отключается этот контактор вспомогательными контактами линейного контактора КМ1 (рис. 4, б) или контактором реверса КМ2 и КМЗ (рис. 4, в) в реверсивных схемах. Обычно механическое торможение осуществляется вместе с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита УВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 4, г).
Часто электромагниты тормозов включаются с форсировкой, осуществляемой дополнительным контактором КМ6 (рис. 4,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА на срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 %. Реле времени КТ используется для обеспечения наложения механического тормоза при остановке двигателя.
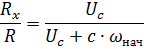
При торможении ДПТ со скорости выше основной, соответствующей ослабленному магнитному потоку, управление моментом при усилении магнитного потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магнитного потока. При динамическом торможении используется узел схемы, приведенный на рис. 5, а, а при торможении противовключением — узел, приведенный на рис. 5, б.
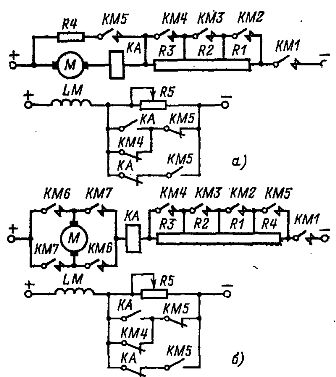
Рис. 5. Узлы схем динамического торможения (а) и противовключения (б) с усилением магнитного потока двигателя постоянного тока с управлением с контролем тока.
В схемах применены три ступени пучкового резистора (R1 — R3) и три контактора ускорения (КМ2 — КМ4), одна ступень динамического торможения и противовключения R4 и один контактор торможения (противовключения) КМ5.
Усиление магнитного потока осуществляется размыкающим контактом токового реле КА, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5.
Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, включению реле КА и ослаблению магнитного потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение и противовключением в соответствии с характеристиками, определяемыми резисторами R4 и R1— R4.
Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием.
Динамическое торможение ДПТ
Динамическое торможение осуществляется при замыкании вращающегося якоря двигателя на тормозное сопротивление после отключения его от сети. Обмотка возбуждения двигателя должна оставаться подключённой к сети. При этом осуществляется генераторное торможение двигателя с отдачей энергии тормозному сопротивлению.
Схема динамического торможения двигателя постоянного тока с параллельным возбуждением и механические характеристики естественная и динамического торможения в относительных единицах показаны на рис. 3.3, а, б.

Рис. 3.3. — Схема динамического торможения двигателя постоянного тока
с параллельным возбуждением (а) и механические характеристики
естественная и динамического торможения (б)
Графический способ расчёта. Графический способ расчёта сопротивления динамического торможения выполняется в следующей последовательности (см. рис. 3.7,б):
1. Задаются (или он должен быть задан) начальным тормозным моментом в пределах допустимого значения по условиям коммутации:
 .
.
2. Строят во втором квадранте механическую характеристику динамического торможения по двум точкам с координатами [ν = νС, μ = μТ.НАЧ.] и [ν = 0, μ = 0].
3. В первом квадранте проводят прямую, параллельную механической характеристике динамического торможения, и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «с»).
4. Находят численное значение тормозного сопротивления в относительных единицах, которое равно отрезку, отсекаемому при μ = 1 естественной характеристикой и прямой, параллельной механической характеристике динамического торможения (отрезок «в–с»).
5. Определяют динамическое тормозное сопротивление по формуле:
 .
.
Аналитический способ расчёта. При динамическом торможении ток якоря, протекающий в замкнутом контуре торможения:
 .
.
Подставим вместо Е максимально возможную величину ЭДС Емакс. и вместо IТ ток IТ.НАЧ., получим
 .
.
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хода), что ведёт к некоторому увеличению тормозного сопротивления, будем иметь
 .
.
Динамическое торможение двигателя параллельного возбуждения




![]()
Способы торможения двигателей постоянного тока
Основные сведения
В электроприводах различают механическое и электрическое торможение.
Под механическим понимают торможение электропривода при помощи тормозных устройств, принцип действия которых основан на использовании трения.
Механическое торможение обеспечивает полную остановку электропривода и его фиксацию в заторможенном состоянии. Этот вид торможения применяется в судовых элек-
троприводах, работа которых связана с преодолением действия силы тяжести – грузоподъ-
ёмных и якорно-швартовных.
Под электрическим торможением понимают создание на валу электродвигателя электромагнитного момента, направленного навстречу вращению якоря ( ротора ). Для электрического торможения применяют специальные узлы в схемах управления электро-
Как правило, электрическое торможение применяют не для полной остановки элект-
ропривода, а для предварительного уменьшения скорости до такой, при которой можно на-
чинать механическое торможение.
Например, существующие электромагнитные тормоза серий ДПМ постоянного то
ка и ТМТ переменного можно отключать при начальной скорости не более 750 об /мин.
Значит, в электроприводе 3-скоростной лебёдки со скоростями 3000, 1500 и 750 об / мин нельзя начинать торможение со скоростей 3000 и 1500 об / мин, иначе на валу двигателя возникнут большие динамические усилия, которые могут повредить двигатель, передачу и сам механизм. Кроме того, из-за увеличенного трения тормоз будет перегре
ваться и быстро изнашиваться.
Электрическое торможение применяют, в основном , в электроприводах судовых грузоподъемных механизмов, работающих с частыми пусками и остановками.
Различают 4 вида электрического торможения:
3. торможение противовключением при активном статическом моменте;
4. торможение противовключением при реактивном статическом моменте.
На судах из перечисленных видов торможения, в основном, применяется динамиче
ское и рекуперативное.
Динамическое торможение двигателя параллельного возбуждения
В схеме динамического торможения ( рис. 9.8, а ) используются контакт КТ тормозного контактора контакт КЛ линейного. Эти контакты всегда находятся в противоположном состоянии: если замкнут контакт КЛ, разомкнут контакт КМ, и наоборот.
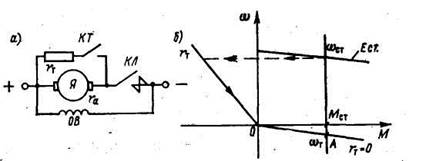
Рис. 9.8. Схема ( а ) и механические характеристики ( б ) при динамическом торможении двигателя постоянного тока
До начала торможения, при работе двигателя, контакт КЛ замкнут, контакт КТ разом
кнут. Двигатель подключен к сети и вращается со скоростью ω  .
.
Ток в обмотке якоря
I  = ( U – E ) / r ,
= ( U – E ) / r ,
где: Е = k ω Ф — противоЭДС обмотки якоря, прямо пропорциональная скорости двигателя ω .
Этот ток протекает через якорь в направлении слева направо ( в соответствии с по
лярностью напряжения питающей сети ).
Для торможения размыкают контакт КЛ и замыкают КТ. При размыкании контакта КЛ двигатель отключается от сети, поэтому напряжение на обмотке якоря U = 0.
При замыкании контакта КТ к обмотке якоря двигателя подключается тормозной токоограничивающий резистор r  , причём обмотка якоря и резистор соединены последо-
, причём обмотка якоря и резистор соединены последо-
Ток в такой цепи определяется по закону Ома
I = ( U – E ) / ( r + г ) = (0-Е)/ ( r + г ) = — Е/( r + г ).
В этой формуле ток якоря имеет знак «минус», значит, направление тока в обмотке якоря изменилось на обратное — справа налево.
Изменение направления тока приводит к изменению знака электромагнитного момента двигателя М = k( — I )Ф 
ω = 0, противоЭДС Е = 0, ток якоря I = 0 и электромагнитный момент двигателя М = 0.
При реактивном статическом моменте ( насос, вентилятор ) процесс торможения закончится в точке 0.
При активном статическом моменте процесс может иметь продолжение, а именно: если в точке 0 двигатель не затормозить, он под действием груза реверсирует и станет раз
гоняться в обратном направлении до скорости ω .
Полярность противоЭДС изменится на обратную, т.к. Е = k( — ω)Ф 0.
Поэтому изменится на обратный знак электромагнитного момента, т.е. он вновь стал вращающим, направленным на подъём. При этом двигатель работает в режиме тормоз
ного спуска, притормаживая груз и ограничивая скорость спуска груза значением скорости ω ( точка А ).
1. простота торможения, т.к. для его получения нужен тормозной контактор КТ и тормозной резистор;
2. торможение позволяет полностью остановить якорь ( т. «0» на рис. 9.8, б );
3. торможение широко применяется в электроприводах грузоподъемных механиз-
мов для предварительного сброса скорости перед срабатыванием основного, электромаг-
нитного тормоза, обеспечивающего полную остановку груза.