Схема динамического торможения асинхронного двигателя с короткозамкнутым ротором

Динамическое торможение асинхронного двигателя выполняется отключением двигателя от трехфазной сети и подачи постоянного напряжения на любые две обмотки статора (AB, BC или AC). Магнитный поток в обмотках статора, взаимодействует с током ротора, создавая тормозной момент, что приводит к полному останову двигателя.
Пуск асинхронного двигателя с кз ротором
Подача напряжения на управляющую и силовую цепь осуществляется автоматическим выключателем QF. Нажатием кнопкой SB1 “Пуск” запитывается магнитный пускатель КМ1, который срабатывает и замыкает свои контакты:
- КМ1.1 в цепи статора — двигатель запускается
- КМ1.2 — шунтирует кнопку “Пуск”
- КМ1.3 -подает напряжения на реле времени КТ
и размыкает нормально замкнутый контакт КМ1.4 который не даст сработать магнитному пускателю КМ2, после срабатывания реле времени КТ.
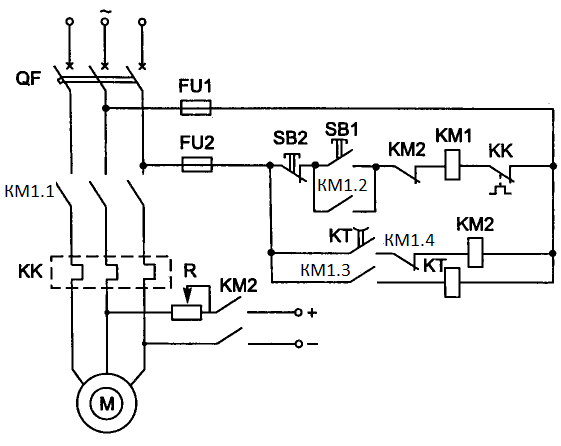 Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Рисунок.1. Схема управления асинхронным двигателем с короткозамкнутым ротором с динамическим торможением в функции времени
Осатнов асинхронного двигателя с кз ротором
При нажатии кнопки SB2 “Стоп” катушка пускателя КМ1 обесточивается и пускатель одновременно возвращает свои контакты в исходное положение:
- Размыкает КМ1.1 (прекращает подачу электрического тока на обмотку статора) – асинхронный двигатель обесточен.
- Размыкает КМ1.2 — разблокирует кнопку пуска
- Размыкает КМ1.3 — обесточивает реле времени КТ
- Замыкает нормально замкнутый контакт КМ1.4, что приводит подачи напряжения на контактор КМ2, так как контакты реле времени КТ размыкаются не сразу, а через заданный временной интервал. При срабатывании КМ2 на статор асинхронного двигателя подаётся постоянное напряжение, двигатель переходит в режим динамического торможения.
В схеме применено реле времени с выдержкой времени при размыкании. Длительность подачи постоянного напряжения на статор будет равна выдержки реле КТ. После истечении выдержки скорость вала двигателя близка к нулю, контакты КТ размыкаются и обесточивают КМ2 и двигатель отключается от сети.
Для регулировки интенсивности торможения в цепь статора включен регулировочный резистор R. В схеме применена блокировка с помощью размыкающих контактов КМ1.4 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Схема динамического торможения двигателя
 Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения — динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов. Наиболее популярным и распространенным способом является использование динамического торможения двигателей.
Некоторые технологии требуют, чтобы процесс остановки электропривода протекал интенсивнее, чем только под действием статического момента. В этом случае в схемах управления используют различные виды электрического торможения — динамическое торможение и торможение противовключением, а также механическое торможение с помощью электромагнитных тормозов. Наиболее популярным и распространенным способом является использование динамического торможения двигателей.
На рисунке приведена принципиальная схема нереверсивного электропривода, которая позволяет производить пуск и остановку электродвигателя с динамическим торможением.
Питание на схему подаётся автоматическим выключателем QF, напряжение переменного тока на обмотку статора — линейным контактором КМ1, напряжение постоянного тока — контактором (пускателем) динамического торможения КМ2. Источник постоянного тока содержит трансформатор Т и выпрямитель V1, подключаемые к сети контактором КМ2 только в режиме торможения.
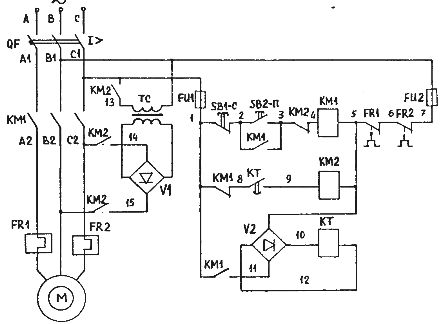
Схема нереверсивного асинхронного электропривода с динамическим торможением
Команда на пуск подаётся кнопкой SB2-П, а команда на остановку подаётся кнопкой SBC. При ее нажатии включается контактор КМ1, и двигатель подключается к сети. Для остановки двигателя нажимают кнопку SB1-C, контактор КМ1 отключается и отключает двигатель от сети переменного тока. Одновременно нормально закрытым (н.з.) блок-контактом КМ1 включается контактор КМ2, подающий в обмотки статора двигателя постоянный ток. Двигатель переходит в режим динамического торможения. Длительность подачи постоянного тока в обмотки статора контролируется реле времени КТ. После отключения катушки КТ его контакт в цепи катушки КТ2 с выдержкой времени размыкается.
В схеме применены нулевая, максимально-токовая, осуществляемая соответственно линейным контактором КМ1, автоматическим выключателем QF с максимально-токовым расцепителем. Схема управления защищена предохранителями FU1 и FU2. При срабатывании любой из защит отключается линейный контактор КМ1. Используемая в схеме блокировка контактами 3-4 и 1-8 запрещает одновременное срабатывание контакторов КМ1 и КМ2.
Тепловая защита двигателя выполняется тепловыми реле FR1, FR2, размыкающие контакты которых включены в цепь катушки контактора КМ. При срабатывании одного из тепловых реле контактор КМ отключается, и схема возвращается в исходное состояние. Повторно она может быть включена после остывания теплового реле и двигателя.
Динамическое торможение двигателя
 Динамическое торможение применяют для быстрой и точной остановки двигателя. Схема динамического торможения двигателя с описание работы находится здесь. В этой же статье мы рассмотрим физические процессы протекающие при динамическом торможении асинхронных двигателей с короткозамкнутым и фазным ротором.
Динамическое торможение применяют для быстрой и точной остановки двигателя. Схема динамического торможения двигателя с описание работы находится здесь. В этой же статье мы рассмотрим физические процессы протекающие при динамическом торможении асинхронных двигателей с короткозамкнутым и фазным ротором.
Динамически торможение вращающегося по инерции инерции короткозамкнутого ротора двигателя возникает после отключения обмотки статора от питающей сети переменного тока. Двигатель останавливается после присоединения обмотки к источнику постоянного тока.
Постоянные токи в фазах обмотки статора обуславливают соответствующую ЭДС, возбуждающую в двигателе неподвижное магнитное поле. Оно наводит в фазах обмотки вращающегося ротора переменные ЭДС и токи убывающей частоты. Следовательно, асинхронный двигатель переходит в режим генератора переменного тока с неподвижными магнитными полюсами. В этом режиме двигатель преобразует кинетическую энергию движущихся и вращающихся по инерции звеньев производственного механизма в электрическую, переходящую в тепловую энергию в цепи обмотки ротора.
Взаимодействие магнитного поля, возбужденного магнитодвижущей силы обмотки статора, с током в фазах обмотки ротора обуславливает возникновение тормозного момента, под действием которого ротор двигателя останавливается.
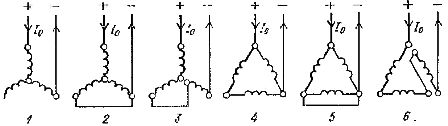
Рис. 1. Схемы включения фаз обмотки статора трехфазного асинхронного двигателя на постоянное напряжение при динамическом торможении
Величина тормозного момента зависит от значения магнитодвижущей силы обмотки статора, величины активного сопротивления регулируемых резисторов цепи обмотки ротора и его скорости. Для получения удовлетворительного торможении величина постоянного тока должна быть в 4 — 5 paз больше тока холостого хода асинхронного двигателя.

Механические характеристики асинхронной машины при динамическом торможении проходят через начало координат, так как при скорости, ранней нулю, тормозной момент отсутствует. Величина максимального тормозною момента возрастает с увеличением постоянною тока, но не зависит от величины активных сопротивлений регулируемых резисторов, введенных в цепь обмотки ротора, которые определяют его скорость, при которой момент достигает значения Мт = Ммах G . При заданном тормозном моменте Мт увеличение активных активного сопротивления резисторов Rд приводит к возрастанию скорости ротора.
Динамическое торможение асинхронных двигателей достаточно экономично и осуществимо как при скоростях меньших синхронной скорости, так и при скоростях, превышающих ее (рис. 2).
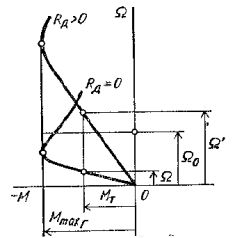
Рис. 2. Механические характеристики трехфазного асинхронного двигателя с фазным ротором при динамическом торможении
Для трехфазных асинхронных двигателей с короткозамкнутым ротором также часто применяют конденсаторное торможение, при котором к зажимам обмотки статора присоединяют симметричную трехфазную батарею конденсаторов, которая после отключения машины от питающей сети и вращающемся по инерции роторе обеспечивает возбуждение в обмотке статора трехфазной симметричной системы напряжений. Вследствие перехода машины на генераторный режим возникает тормозной момент, снижающий скорость ротора двигателя. Подробнее об этом читайте здесь: Конденсаторное торможение асинхронных электродвигателей
Схема динамического торможения двигателя по скорости
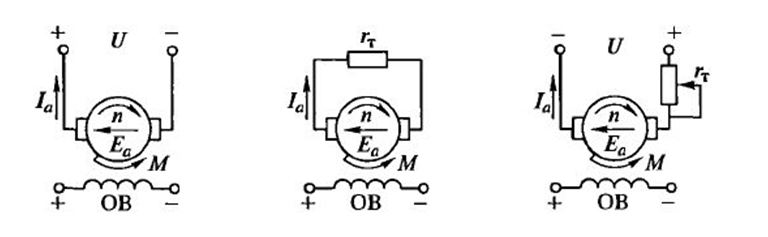
Динамическое торможение АД (торможение постоянным током) осуществляется путем подключения к двум любым обмоткам статора источника постоянного тока. При этом с помощью группы контактов К1 асинхронный двигатель сначала отключают от питания трехфазным переменным током, и только после этого, замыкают группу контактов К2 и подают постоянный ток. Величину постоянного тока регулируют сопротивлением r т (рисунок 1).
Рисунок 1 — Схема динамического торможения асинхронного двигателя
Само динамическое торможение асинхронного двигателя сопровождается следующими процессами и изменениями:
При отключении переменного тока, вращающееся магнитное поле перестает существовать. Далее подключают источник постоянного тока, который создает постоянное магнитное поле. Ротор по инерции продолжает крутиться теперь уже в постоянном магнитном поле, в обмотке ротора наводится ЭДС, ее частота прямо пропорциональна скорости вращения вала. Появление тока в обмотке ротора вызвано наличием вышеупомянутой ЭДС. Ток создает магнитный поток, который неподвижнен относительно статора. Взаимодействие результирующего магнитного поля АД и тока ротора создает тормозной момент. При этом асинхронный двигатель становится генератором; преобразовует кинетическую энергию вращающегося вала в электрическую, которая на обмотке ротора рассеивается в виде тепловой энергии. При переходе в режим динамического торможения частота и угловая скорость равны: f =0 w =0. Кривая динамического торможения должна проходить через начало координат и торможение происходит до полной остановки (рисунок 2).
Эффективность динамического торможения зависит от параметров:
— Величина постоянного тока, который протекает по статорной обмотке двигателя (чем больше ток, тем больше тормозной эффект);
— Величина сопротивления, введенного в цепь ротора. Эффективность торможения повышается путем комбинирования динамического торможения и торможения с введением сопротивлений в обмотку ротора (рисунок 2):
Рисунок 2 – Механическая характеристика динамического торможения асинхронного двигателя
Чем больше сопротивление введено в цепь ротора, тем выше эффективность торможения, то есть на кривой а1 изображена самая быстрая остановка двигателя при наибольшем сопротивлении — R1>R2 >R3 .
— Схема соединения обмоток статора .
Величина магнитодвижущей силы ( F ) напрямую связана с понятием эффективность торможения, чем больше значение силы – тем эффективней происходит торможение,
На рисунках, которые изображены ниже, стрелками показаны направления протекания постоянного тока по обмоткам, IW – ампер витки (так как количество витков в обмотках одинаково, то зависит значение только от величины тока). Векторные диаграммы иллюстрируют направления магнитодвижущих сил ( F ), сложив по правилам суммирования векторы, мы получим результирующий вектор, который обозначен жирной стрелкой.
Обмотка статора может быть соединена:
а) Схема соединения обмотки статора в звезду:
б) Схема соединения статорной обмотки в треугольник:
в) Соединение обмотки статора в звезду с закороченными двумя фазами:
г) Подключение звезда с разорванным нулем:
д) Подключение треугольник с закороченными фазами:
Схемы соединения а) и б) имеют наибольшее распространение, потому что не требуют переключения при торможении самих обмоток.
Необходимо подметить, что напряжение ( U ) источника постоянного тока должно быть малой величиной, потому что сопротивление обмотки статора мало. Ток выбирается из условия необходимого начального тормозного момента, обычно выбирают
Преимущества режима динамического торможения:
— Относительная простота осуществления способа;
— Возможность торможения до полной остановки вала ротора;
— Высокая эффективность торможения, особенно при использовании комбинированного метода.
Основным недостатком является необходимость наличия источника постоянного тока.
Расчет величины тормозного сопротивления:
где R T — полное сопротивление цепи источника постоянного тока,
rф.ст — сопротивление фазы статора.
Вышеприведенные формулы являются частным случаем (для понимания отношений величин сопротивления), когда постоянный ток протекает только по двум обмоткам статора, если же ток будет протекать по трем обмоткам, то коэффициент (количество фаз) перед сопротивлением фазы статора нужно соответственно изменить.
Советую вам прочесть статью про торможение противовключением, в которой подробно расписан данный вид остановки двигателя.
Виды и схемы динамического торможения асинхронного двигателя
Электропривод является основой практического большинства современных механизмов. Одной из форм его работы является динамическое торможение асинхронного двигателя. Почему этот режим имеет такое значение и как он организовывается, попытаемся разобраться в этой статье.
Асинхронный двигатель и его работа
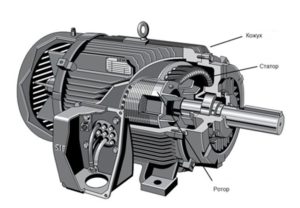 Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
Очевидно, что режимы функционирования электродвигателей асинхронного типа напрямую зависят от их конструкции и общих принципов работы. Этот силовой агрегат совмещает в себе два ключевых компонента:
- Неподвижный статор. Пластинчатый цилиндр, в продольные пазы на внутренней поверхности которого укладывается проволочная обмотка,
- Вращающийся ротор. Совмещенный с валом сердечник (магнитопровод), который содержит прутковую обмотку на внешней стороне.
За счет различных частот вращения статора и ротора между ними возникает ЭДС, которая приводит вал в движение. Стандартное значение этого параметра может достигать 3000 об/мин, что требует определенного усилия для ее остановки. Из логических соображений можно заключить, что раз стартует двигатель за счет ЭДС, то и останавливать его тоже нужно электродинамическим путем.
Что такое динамическое торможение?
На этом месте может возникнуть закономерный вопрос: зачем что-то придумывать, если можно отключить двигатель от электросети, и он сам остановится? Это бесспорно так, но учитывая высокую частоту вращения и массо-центровочные характеристики, пройдет некоторое время до того момента, когда ротор полностью остановится. Этот период называется свободным выбегом и каждый в детстве его наблюдал, запуская простую юлу. Тем не менее, если работа оборудования предполагает частое использование пускателей, то такой режим приводит к очевидной потере времени.
Для быстрой остановки используются режимы торможения, которые предполагают трансформацию механической (в данном случае – кинетической) энергии искусственным путем. Все выделяют два основных вида торможения, которые подразделяются затем на подвиды:
- Механическое. Вал двигателя сообщается физически с тормозными колодками, вследствие чего возникает трение, быстрая остановка и выделение теплоты,
- Электрическое. Асинхронный двигатель останавливается за счет преобразования цепи подключения, вследствие чего механическая энергия трансформируется сперва в электрическую. Далее возможны два варианта ее израсходования, зависящие от схемы: либо избыток электричества выбрасывается в резервную цепь сети, либо трансформируется в тепло, за счет нагрева обмоток и сопротивления.
Динамическое торможение асинхронного двигателя относится к электрическому типу, так как в процессе обмотка статора отключается от сети с переменным током (две из трех фаз) и переводится в замкнутую цепь постоянного тока. При этом магнитное поле в статоре преобразуется из вращающегося в неподвижное. В роторе по-прежнему будет наводиться ЭДС, но момент будет направлен в обратную сторону, что приводит к торможению.
Главным преимуществом такого способа торможения является возможность плавно контролировать тормозящий момент (за счет изменения напряжения или сопротивления) и осуществлять точную остановку.
Основные виды динамического торможения
Организация принудительной остановки асинхронного двигателя по электрическому принципу может быть осуществлена несколькими способами:
- Электродинамическим. Это классический вариант, при котором две фазы нужно закоротить и перевести на питания от цепи постоянного тока,
- Рекуперативным (генераторным). Характеризуется возвратом лишней электроэнергии в сеть,
- Противовключением. Этот вариант реализуется по схеме реверса, то есть с подключением фаз через пару магнитных пускателей,
- Самовозбуждением. Подключением к обмоткам статора батареи конденсаторов.
Виды динамического торможения
Классическое динамическое торможение
Эффективность такого режима работы зависит от расчета и значения следующих параметров:
- Величина тока, который подается через параллельную цепь на обмотки статора. Чем выше этот показатель, тем больше момент торможения,
- Величина сопротивления, которое вводится в цепь ротора. Чем выше по расчету сопротивление, тем быстрее тормозится двигатель,
- Величина магнитной движущей силы (МДС). Иногда ее называют ампер витками, поскольку расчет ведется по формуле F = I×W, где I – величина тока, а W – количество витков.
Обмотка статора при этом может подключаться как минимум пятью разными способами:
- Треугольником,
- Треугольником с закороченными фазами,
- Звездой,
- Звездой с закороченным нулем,
- Звездой с закороченными двумя фазами.
В каждом случае на основании векторной диаграммы ведется расчет МДС, тормозного сопротивления и напряжения цепи.
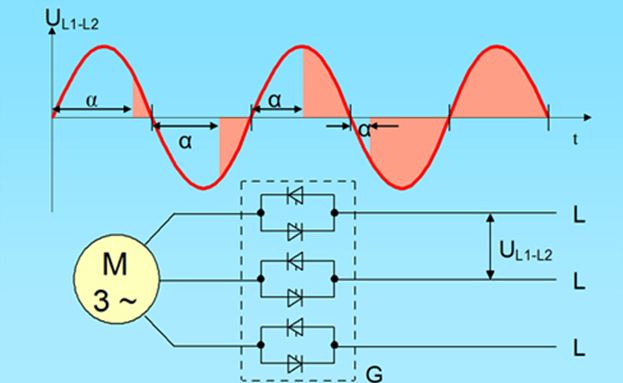
Рекуперативное торможение
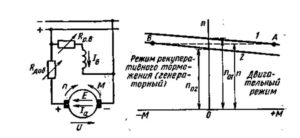
Режим рекуперативного торможения
Поскольку избыток электроэнергии, который высвобождается в процессе торможения, направляется обратно в сеть через мост/батарею конденсаторов, то этот режим работы считается наиболее экономичным. Наиболее часто этот способ применяется в подъемно-транспортной технике и оборудовании, которое работает на перемещение грузов или собственного веса под уклон. Классический пример – лифт, где рекуперативное торможение приводного двигателя используется для начального подтормаживания. Также подобная схема широко используется в электрифицированном транспорте, например, в трамваях, троллейбусах, электричках. Применяют ее и в специальной технике, например, экскаваторах, широко используемых на строительстве мостов, дорог, зданий и т. п.
Принцип расчета и организации генераторного режима заключается в превышении частотой вращения ротора ее синхронного значения. В таком случае электромагнитный момент меняет направление, что приводит к торможению.
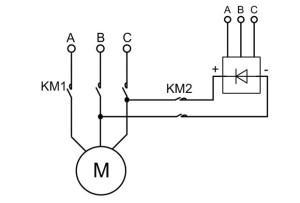
Торможение противовключением
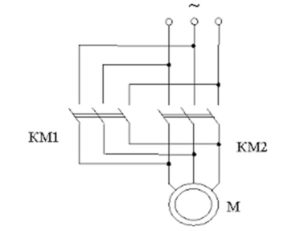
Схема торможения противовключением
На практике режим противовключения может быть организован несколькими разными способами. Классическим является использование пары магнитных пускателей, подключенных по реверсной схеме. В этом случае, быстрая остановка агрегата осуществляется за счет изменения положения фаз (противовключение).
Основной пускатель КМ2 производит отключение двигателя М от сети. После этого параллельный пускатель КМ1 опять включает двигатель, меняя при это крайние фазы местами, то есть заставляя его вращаться в обратную сторону. Чтобы не допустить чрезмерного перегрева в цепь может быть введено дополнительное сопротивление. Также схема противовключения может быть реализована, если двигатель использовать в качестве тормоза для груза.
Торможение самовозбуждением
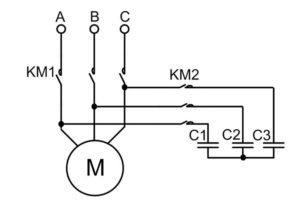
Схема торможения самовозбуждением
Этот вариант реализуется за счет подключения обмоток статора к параллельной конденсаторной батарее или мосту (расчет емкости придется вести). Когда двигатель отключается от сети и должен наступить режим выбега, угасающее магнитное поле начинает питать конденсаторы, а через них возвращается обратно в обмотку, создавая тормозной момент.
Как можно видеть, на практике используется целая гамма специфических режимов работы асинхронных двигателей, которыми можно добиться быстрой и точной его остановки. При частых пусках и остановках динамическое, рекуперативное, реверсное (на пускателях) или конденсаторное торможение (через расчет моста или батареи) могут повысить эффективность работ оборудования и снизить потери времени.