Частотное регулирование асинхронного двигателя
Частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем в настоящее время широко применяется, так как позволяет в широком интервале плавно изменять обороты вращения ротора как выше, так и ниже номинальных значении.
Частотные преобразователи являются современными, высокотехнологичными устройствами, обладающими большим диапазоном регулирования, имеющими обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.

Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В статических частотных преобразователях изменение частоты питающего тока достигается за счет применения не имеющих движения электрических элементов.
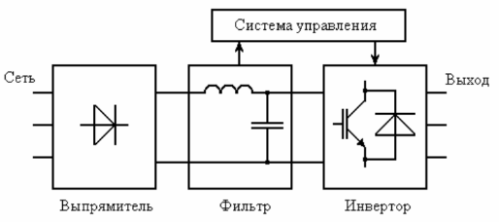
Схема частотного преобразователя асинхронного двигателя
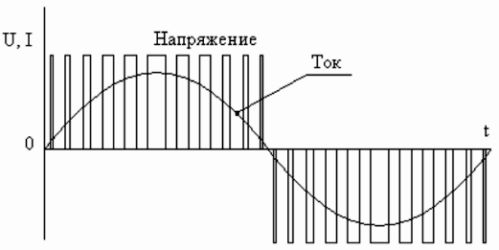
Выходной сигнал преобразователя частоты
Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе — три фазы с тем же значением напряжения, что позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах.
Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
для насосного и вентиляторного привода;
для общепромышленного электропривода;
эксплуатируется в составе электродвигателей, работающих с перегрузкой.
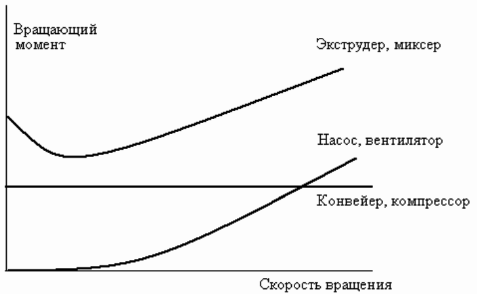
Механические характеристики типичных нагрузок
Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также встроенный потенциометр на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Поддерживать функции автоматического восстановления режима работы при кратковременном прерывании питания. Выполнять управление переходными процессами с удаленного пульта и осуществлять защиту электродвигателей от перегрузок.

Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения
При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения зависли от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f 2 1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/ √ f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.
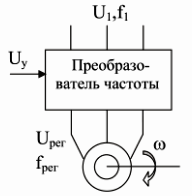
Схема подключения частотного преобразователя к асинхронному электродвигателю
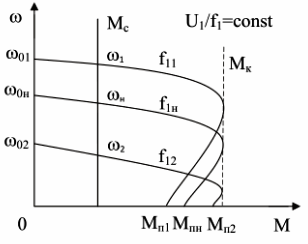
Характеристики для нагрузки с постоянным статическим моментом сопротивления
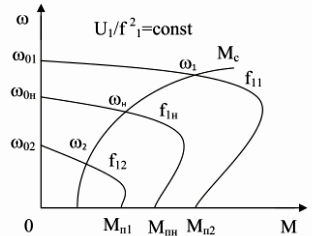
Х арактеристики для нагрузки вентиляторного характера
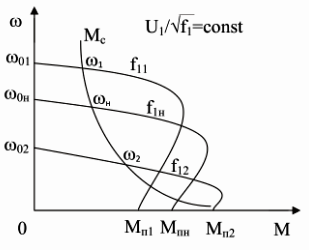
Характеристики при статическом моменте нагрузки обратно пропорциональном угловой скорости вращения
Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне — 20. 30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах. Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
При увеличении оборотов вращения двигателя выше указанного значения в ею паспорте частота источника питания не должна превышать номинальную не более чем 1,5 — 2 раза.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности мри гаком регулировании невелики, поскольку не сопровождаются увеличением скольжения. Получаемые при этом механические характеристики обладают высокой жесткостью.
ПУСК АСИНХРОННОГО ДВИГАТЕЛЯ

Асинхронные электрические двигатели с короткозамкнутым ротором благодаря своей крайней простоте получили широкое распространение, особенно в трехфазных сетях, где им не требуются дополнительные пусковые или смещенные по фазе обмотки.
При правильной эксплуатации асинхронный электродвигатель становится практически вечным – единственное, что в нем может потребовать замены, это подшипники ротора.
Однако ряд особенностей асинхронных двигателей определяет специфику их пускового режима: отсутствие обмотки якоря означает отсутствие противоЭДС индукции в момент включения обмоток статора, а следовательно – высокий пусковой ток.
Если для маломощных электрических двигателей это не критично, то в промышленных электродвигателях пусковые токи могут достигать очень высоких значений, что приводит к просадкам напряжения в сети, перегрузкам подстанций и электропроводки.
ПРЯМОЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Как уже было сказано выше, прямое включение обмотки асинхронного двигателя может применяться только при низкой мощности. В этом случае пусковой ток превышает номинальный в 5-7 раз, что не является проблемой для коммутационного оборудования и электропроводки.
Включение в сеть нового электродвигателя может вызвать настолько сильную просадку напряжения, что уже работающие двигатели остановятся, а новому мотору не хватит пускового момента, чтобы стронуться с места.
Пусковой ток асинхронного двигателя достигает максимального значения в момент включения и плавно снижается до номинального по мере раскрутки ротора.
Следовательно, для уменьшения времени перегрузки сети асинхронный двигатель должен включаться с минимальной нагрузкой, если это возможно.
Мощные токарные станки, гильотины для рубки металла не имеют фрикционных муфт, и все их вращающиеся механизмы раскручиваются в момент включения электродвигателя.
В этом случае длительные просадки напряжения приходится прямо закладывать в проектируемое для них электроснабжение.
ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов.
Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает.
В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
Ускоренный пуск (кик-старт).
Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
Останов на выбеге.
При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
Линейное снижение напряжения.
Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
ПУСК ПО СХЕМЕ ЗВЕЗДА-ТРЕУГОЛЬНИК
Другим способом запуска, использующимся на трехфазных двигателях, является перекоммутация обмоток: в момент пуска обмотки соединяются звездой, по мере разгона ротора обмотки переводятся в нормальное включение треугольником.

Такой метод пуска фактически является частным случаем способа пуска асинхронного электродвигателя на пониженном напряжении, так как напряжение на обмотках при этом снижаетсяпримерно в 1,73 раза.
Подобный способ пуска может быть легко реализован с помощью набора контакторов с ручным управлением или с приводом от реле времени, поэтому достаточно дешев и распространен. Основные недостатки этого способа:
- При отказе одного из контакторов произойдет нарушение коммутации, в результате чего либо станет невозможным пуск, либо значительно снизится мощность двигателя.
- Снижение напряжения и тока является фиксированным.
- Крутящий момент двигателя при включении обмоток звездой уменьшается, поэтому запуск желательно также производить без нагрузки.
ПУСК ЭЛЕКТРОДВИГАТЕЛЯ ЧЕРЕЗ ЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ
Наиболее гибкий способ управления не только режимом пуска, но и рабочими характеристиками асинхронного электродвигателя – это применение частотного преобразователя. По своей сути частотный преобразователь представляет собой узкоспециализированный инвертор:
- входное напряжение в нем выпрямляется;
- затем заново преобразуется в переменное, но уже с заданной частотой и амплитудой.

Это происходит благодаря работе генератора широтно-импульсной модуляции (ШИМ), который создает серию прямоугольных импульсов заданной частоты и скважности (отношения длительности импульса к его периоду). Генерируемые импульсы управляют силовыми ключами, коммутирующими выпрямленное напряжение питания на обмотки выходного трансформатора.
Как осуществляется плавный пуск через частотный преобразователь?
В данном случае становится возможным плавное изменение не только напряжения, но и частоты питающего электродвигатель напряжения. Благодаря тому, что ШИМ-генератор частотного преобразователя легко может управляться с обратной связью по потребляемому току, становится возможным пусковой режим, в котором ток не превышает номинальный – таким образом перегрузка питающей сети фактически отсутствует.
Однако такой пусковой режим требует значительного усложнения частотного преобразователя, поэтому для управления асинхронными электродвигателями обычно используется комбинация с отдельным устройством плавного пуска (УПП).
© 2012-2020 г. Все права защищены.
Представленные на сайте материалы имеют информационный характер и не могут быть использованы в качестве руководящих и нормативных документов