Преобразователь частоты для асинхронного – схема
Асинхронный двигатель (машина) – это электрический двигатель, частота вращения которого не совпадает с частотой тока (ЭДС), прикладываемого к статору.
Рис. 1. Асинхронный двигатель
К преимуществам таких двигателей можно отнести их низкую стоимость, простоту изготовления и эксплуатации, а также возможность прямого включения (без регулирования или преобразования питающего тока). Есть у них и недостатки: высокие требования к пусковому току, сложная регулировка оборотов, низкий коэффициент мощности и др.
Здесь стоит отметить, что асинхронные двигатели рассчитаны на работу только с трехфазным напряжением, только в этом случае не требуются никакие преобразователи.
Однако, в быту часто требуется запитать асинхронный двигатель от обычной сети переменного тока с одной фазой, и именно здесь кроется основная проблема.
Необходимость использования частотного преобразователя
Есть несколько способов управления асинхронным двигателем, и один из них – регулировка частоты.
Изменяя частоту питающего тока, вы меняете частоту вращения двигателя, можете запустить его или наоборот – остановить.
В качестве преобразователя напряжения наибольшее распространение нашли инверторные схемы. Они обеспечивают широкий диапазон регулировки частот, обладают высоким КПД и другими отличными техническими характеристиками.
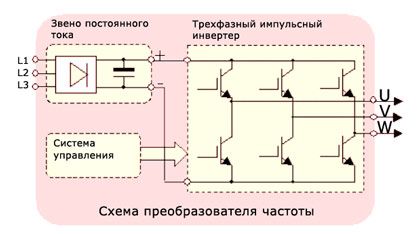
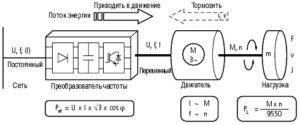
Схему работы инверторов можно изобразить следующим образом.
Рис. 2. Схема работы инверторов
Однофазное переменное напряжение преобразуется в постоянное, подается в блок с импульсным инвертором, который формирует три независимых переменных напряжения (одинакового уровня, но со смещенной фазой) — ключа.
Схема инверторного преобразователя для асинхронного двигателя
Преобразователи можно приобрести в готовом виде, а можно изготовить своими руками.
Сложность проектирования и создания таких схем заключается в логике их работы. В настоящее время с приходом программируемых контроллеров Arduino и т.п. имеется возможность создавать сложные схемы с широким диапазоном регулировки частот всех трех питающих напряжений. Однако, для начала рассмотрим простые варианты.
Двигатель ДИД-0.5ТА (напряжение питания около 27 В, частота вращения – до 400 Гц) имеет небольшую мощность и широко применяется в системах автоматики. Чтобы привести его в движение и отрегулировать частоту вращения вала можно использовать следующую схему.
Рис. 3. Схема двигателя
По сути она представляет собой три разделенных генератора частоты (ключа) на базе логических элементов.
За регулировку отвечает резистор R2. Такая схема не подойдет для запуска асинхронных двигателей, работающих от трехфазного напряжения 380 В.
Для этих целей можно использовать адаптированную схему.
Рис. 4. Адаптированная схема
Здесь блоки выходных ключей A2 и А3 изображены схематично, так как полностью дублируют блок А1.
Программировать здесь ничего не нужно.
Более сложные реализации
Многие производители предлагают специальные контроллеры, на базе которых управление асинхронными двигателями существенно упрощается.
Один из таких вариантов – контроллер MC3PHAC.
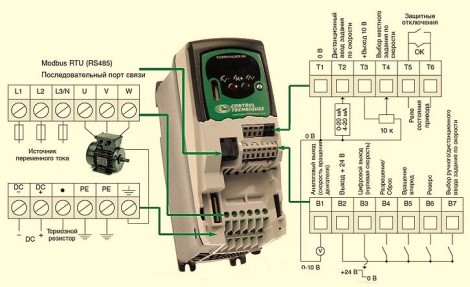
Рекомендуемая производителем схема подключения.
Рис. 5. Схема подключения
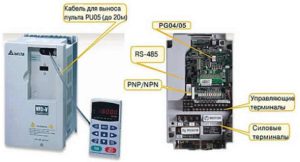
Реализация платы частотного преобразователя может быть, например, такой.
Рис. 6. Реализация платы частотного преобразователя
Обмен данными по последовательному интерфейсу RS232 с персональным компьютером не обязателен. Схема может работать автономно.
Управляющие сигналы и процедуры инициализации можно уточнить в даташите производителя.
Еще один вариант с готовой прошивкой для микроконтроллера
Схема использовалась для питания трехфазного двигателя на пилораме (наверное, самый популярный способ использования трехфазных двигателей).
Рис. 7. Схема для питания трехфазного двигателя
Блок питания к ней.
Рис. 8. Схема блока питания
Вариант печатной платы.
Рис. 9. Печатная плата
Частота может регулироваться в диапазоне 2,5-50 Гц с шагом 1,25. ШИМ – 1700 – 3300 Гц. Мощность двигателя – не более 4 кВт.
После одиночного короткого нажатия на кнопку «пуск» подается пусковая частота – 10 Гц. А удерживание инициирует дальнейший разгон до 50 Гц (в течении приблизительно 2 секунд).
Прошивка для контроллера PIC16F628(A) здесь.
Мнения читателей
Приветствую! Нашел в интернете сайт с интересными видео. Прикольно. Советую Как заработать на Телеграм канале в 2020 — Раскрутка и Монетизация Telegram канала с нуля @@-=
Александрррррр / 27.10.2020 — 17:14
Здравствуйте! Буду очень признателен, если кто-нибудь подскажет, есть ли ссылка на скачивание данной схемы в хорошем качестве? (На PIC — контроллере)
Андрей Рославцев / 21.10.2020 — 20:42
Добрый вечер. Пришлите. пожалуйста схему на электронный адрес nata.roslavceva@mail.ru т.к. плохо видно значения элементов на схеме. Заранее спасибо.
Дмитрий / 16.10.2019 — 18:34
Здравствуйте,а можно какой-нибудь список элементов и т.д?Просто на фотографии плохо видно.
admin / 07.10.2019 — 16:05
admin / 07.10.2019 — 15:12
Да, есть проблема, проверим, поправим, на почту архив вышлем. Спасибо.
Сергей / 07.10.2019 — 14:21
Если возможно прошу указать другой адрес прошивки или выслать файл в по личку. При обращении к ссылке указанной Вами выше — выдается сообщение о Зараженности данного ресурса вирусо.По содержанию статьи- ОЧЕНЬ ПОДРОБНО И СОДЕРЖАТЕЛЬНО. Вам РЕСПЕКТ.Сергей.vitrilo@mail.ru
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Схема частотного привода асинхронного двигателя
Простой преобразователь частоты для асинхронного электродвигателя.
Автор: Сергей М.
Опубликовано 11.12.2012
Создано при помощи КотоРед.
Первым был ресторан – зимой холодный воздух должен строго дозировано дуть на разгорячённых посетителей, а летом наоборот –замерзших от холодного мороженого плавно согревать жарким воздухом с улицы. Без инвертора никак не обойтись.
Второй хочет стричь лохматых овец , но вот беда машинка трехфазная. А в поле только одна да и та не 220в. Опять нужен инвертор.
Третий вообще наждачный камень , сверлильный станок и намоточный –захотел прицепить к двигателю.
В конце концов оглядевшись по сторонам я увидел – все…все делают инверторы японцы, французы, немцы …. , только я ещё не имею своего точила для отверток. И мало того все приличные фирмы уже написали , как это делать.
Итак коль уж асинхронный двигатель так распространён и трехфазная система напряжения созданная М. О. Доливо-Добровольским так удобна. А современная элементная база так хороша. То сделать преобразователь частоты –это лишь вопрос личного желания и некоторых финансовых возможностей. Возможно кто то скажет « Ну, зачем мне инвертор , я поставлю фазосдвигающий конденсатор и все решено» . Но при этом обороты не покрутишь и в мощности потеряешь и потом это не интересно.
Возьмём за основу – в быту есть однофазная сеть 220в, народный размер двигателя до 1 кВт. Значить соединяем обмотки двигателя треугольником. Дальше –проще, понадобится драйвер трехфазного моста IR2135(IR2133) выбираем такой потому, что он применяется в промышленной технике имеет вывод SD и удобное расположение выводов. Подойдёт и IR2132 , но у неё dead time больше и выхода SD нет. В качестве генератора PWM выберем микроконтроллер AT90SPWM3B — доступен, всем понятен, имеет массу возможностей и недорого стоит, есть простой программатор -https://real.kiev.ua/avreal/. Силовые транзисторы 6 штук IRG4BC30W выберем с некоторым запасом по току — пусковые токи АД могут превышать номинальные в 5-6 раз. И пока не ставим «тормозной» ключ и резистор, будем тормозить и намагничивать перед пуском ротор постоянным током, но об этом позже . Весь процесс работы отображается на 2-х строчном ЖКИ индикаторе. Для управления достаточно 6 кнопок (частота +, частота -, пуск, стоп, реверс, меню).
Получилась вот такая схема. 
Я вовсе не претендую на законченность конструкции и предлагаю брать данную конструкцию за некую основу для энтузиастов домашнего электропривода. Приведённые здесь платы были сделаны под имеющиеся в моём распоряжении детали.
Конструктивно инвертор выполнен на двух платах – силовая часть ( блок питания , драйвер и транзисторы моста , силовые клеммы) и цифровая часть (микроконтроллер + индикатор ). Электрически платы соединены гибким шлейфом. Такая конструкция выбрана для перехода в будущем на контроллер TMS320 или STM32 или STM8.
Блок питания собран по классической схеме и в комментариях не нуждается. Микросхема IL300 линейная опто развязка для управления током 4-20Ма. Оптроны ОС2-4 просто дублируют кнопки «старт, стоп, реверс» для гальванически развязанного управления. Выход оптрона ОС-1 «функция пользователя» (сигнализация и пр.)
Силовые транзисторы и диодный мост закреплены на общий радиатор. Шунт 4 витка манганинового провода диаметром 0.5мм на оправке 3 мм.
Сразу замечу некоторые узлы и элементы вовсе не обязательны. Для того что бы просто крутить двигатель , не нужно внешнее управление током 4-20 Ма. Нет необходимости в трансформаторе тока, для оценочного измерения подойдёт и токовый шунт. Не нужна внешняя сигнализация. При мощности двигателя 400 Вт и площади радиатора 100см 2 нет нужды в термодатчике.
ВАЖНО! – имеющиеся на плате кнопки управления изолированы от сети питания только пластмассовыми толкателями. Для безопасного управления необходимо использовать опторазвязку.
Возможные изменения в схеме в зависимости от микропрограммы.
Усилитель DA-1 можно подключать к трансформатору тока или к шунту. Усилитель DA-1-2 может быть использован для измерения напряжения сети или для измерения сопротивления терморезистора если не используется термодатчик PD-1.
В случае длинных соединительных проводов необходимо на каждый провод хотя бы надеть помехоподавляющие кольцо. Имеют место помехи. Так например –пока я этого не сделал у меня «мышь» зависала.
Так же считаю важным отметить проверку надёжности изоляции АД –т.к. при коммутации силовых транзисторов выбросы напряжение на обмотках могут достигать значений 1,3 Uпит.
Общий вид. 
Немного про управление.
Начитавшись книжек с длинными формулами в основном описывающих как делать синусоиду при помощи PWM. И как стабилизировать скорость вращения вала двигателя посредством таходатчика и ПИД регулятора. Я пришёл к выводу –АД имеет достаточно жёсткую характеристику во всём диапазоне допустимых нагрузок на валу.
Поэтому для личных нужд вполне подойдет управление описанное законом Костенко М.П. или как его ещё называют скаляроное. Достаточное для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40. Т.е. грубо говоря мы в самом простом случае делаем обычную 3-х фазную розетку с переменной частотой и напряжением меняющимися в прямой зависимости. С небольшими «но» на начальных участках характеристики необходимо выполнять IR компенсацию т.е. на малых частотах нужно фиксированное напряжение . Втрое «но» в питающие двигатель напряжение замешать 3 гармонику. Всё остальное сделают за нас физические принципы АД. Более подробно про это можно прочесть в документе AVR494.PDF
Основываясь на моих личных наблюдениях и скромном опыте именно эти методы без особых изысков чаще всего применяются в приводах мощностью до 15 кВт.
Далее не буду углубляться в теорию и описание мат моделей АД. Это и без меня достаточно хорошо изложили профессора ещё в 60-х.
Но ни в коем случае не стоит недооценивать сложности управления АД. Все мои упрощения оправданны только некоммерческим применением инвертора.
Плата силовых элементов. 
В программе V-1.0 для AT90SPWM3B реализовано
1- Частотное управление АД .Форма напряжения синусоида с 3 гармоникой.
2- Частота задания 5 Гц -50 Гц с шагом 1 Гц. Частота ШИМ 4 кГц.
3- Фиксированное время разгона –торможения
4- Реверс (только через кнопку СТОП)
5- Разгон до заданной частоты с шагом 1 Гц
6 – Индикация показаний канала АЦП 6 (разрядность 8 бит., оконный фильтр апертура 4 бита)
я использую этот канал для замера тока шунта.
7 – Индикация режима работы START,STOP,RUN,RAMP, и Частота в Гц.
8- Обработка сигнала авария от мс IR2135
Торможение двигателя принудительное – без выбега. При этом нужно помнить – если на валу будет висеть огромный вентилятор или маховик то напряжение на звене постоянного тока может достичь опасных значений. Но я думаю вертолёты с приводом от АД строить никто не будет
Функции микропрограммы в будущих версиях
1 -намагничивание ротора перед пуском
2- торможение постоянным током
3 –прямой реверс
4 – частота задания 1 -400 Гц.
5 – ограничение, контроль тока двигателя.
6 — переключаемые зависимости U/F
7 – контроль звена постоянного тока.
8 – некоторые макросы управления –это вообще в далёких планах.
Испытания.
Данная конструкции была проверена с двигателем 0.18кВт и 0.4 кВт и 0.8 кВт. Все двигатели остались довольны.
Только при малых оборотах и долговременной работе необходимо принудительное охлаждение АД.
Строка для программатора
av_28r4.exe -aft2232 -az +90pwm3b -e -w -v -fckdiv=1,psc2rb=0,psc1rb=0,psc0rb=0,pscrv=0,bodlevel=5 -c01.hex
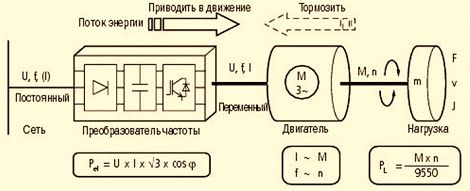
Принцип работы частотного преобразователя для асинхронного двигателя
Трехфазные асинхронные двигатели нашли самое широкое применение в промышленности и других областях. Современное оборудование просто невозможно представить без этих агрегатов. Одной из важнейших составляющих рабочего цикла машин и механизмов является их плавный пуск и такая же плавная остановка после выполнения поставленной задачи. Такой режим обеспечивается путем использования преобразователей частоты. Эти устройства проявили себя наиболее эффективными в больших электродвигателях, обладающих высокой мощностью.
С помощью преобразователей частоты успешно выполняется регулировка пусковых токов, с возможностью контроля и ограничения их величины до нужных значений. Для правильного использования данной аппаратуры необходимо знать принцип работы частотного преобразователя для асинхронного двигателя. Его применение позволяет существенно увеличить срок службы оборудования и снизить потери электроэнергии. Электронное управление, кроме мягкого пуска, обеспечивает плавную регулировку работы привода в соответствии с установленным соотношением между частотой и напряжением.
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.

В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
Одновременно с частотой изменяется и подводимое напряжение, что позволяет увеличить КПД и коэффициент мощности электродвигателя. Все это позволяет получить высокие энергетические показатели асинхронных двигателей, продлить срок их эксплуатации.
Принцип действия частотного преобразователя
Эффективное и качественное управление асинхронными электродвигателями стало возможно за счет использования совместно с ними частотных преобразователей. Общая конструкция представляет собой частотно-регулируемый привод, который позволил существенно улучшить технические характеристики машин и механизмов.
В качестве управляющего элемента данной системы выступает преобразователь частоты, основной функцией которого является изменение частоты питающего напряжения. Его конструкция выполнена в виде статического электронного узла, а формирование переменного напряжения с заданной изменяемой частотой осуществляется на выходных клеммах. Таким образом, за счет изменения амплитуды напряжения и частоты регулируется скорость вращения электродвигателя.
Управление асинхронными двигателями осуществляется двумя способами:
- Скалярное управление действует в соответствии с линейным законом, согласно которому амплитуда и частота находятся в пропорциональной зависимости между собой. Изменяющаяся частота приводит к изменениям амплитуды поступающего напряжения, оказывая влияние на уровень крутящего момента, коэффициент полезного действия и коэффициент мощности агрегата. Следует учитывать зависимость выходной частоты и питающего напряжения от момента нагрузки на валу двигателя. Для того чтобы момент нагрузки был всегда равномерным, отношение амплитуды напряжения к выходной частоте должно быть постоянным. Данное равновесие как раз и поддерживается частотным преобразователем.
- Векторное управление удерживает момент нагрузки в постоянном виде во всем диапазоне частотных регулировок. Повышается точность управления, электропривод более гибко реагирует на изменяющуюся выходную нагрузку. В результате, момент вращения двигателя находится под непосредственным управлением преобразователя. Нужно учитывать, что момент вращения образуется в зависимости от тока статора, а точнее – от создаваемого им магнитного поля. Под векторным управлением фаза статорного тока изменяется. Эта фаза и есть вектор тока осуществляющий непосредственное управление моментом вращения.
Настройка частотного преобразователя для электродвигателя
Для того чтобы преобразователь частоты для асинхронного двигателя в полном объеме выполнял свои функции, его необходимо правильно подключить и настроить. В самом начале подключения в сети перед прибором размещается автоматический выключатель. Его номинал должен совпадать с величиной тока, потребляемого двигателем. Если частотник предполагается эксплуатировать в трехфазной сети, то автомат также должен быть трехфазным, с общим рычагом. В этом случае при коротком замыкании на одной из фаз можно оперативно отключить и другие фазы.
Ток срабатывания должен обладать характеристиками, полностью соответствующими току отдельной фазы электродвигателя. Если частотный преобразователь планируется использовать в однофазной сети, в этом случае рекомендуется воспользоваться одинарным автоматом, номинал которого должен в три раза превышать ток одной фазы. Независимо от количества фаз, при установке частотника, автоматы не должны включаться в разрыв заземляющего или нулевого провода. Рекомендуется использовать только прямое подключение.
При правильной настройке и подключении частотного преобразователя, его фазные провода должны соединяться с соответствующими контактами электродвигателя. Предварительно обмотки в двигателе соединяются по схеме «звезда» или «треугольник», в зависимости от напряжения, выдаваемого преобразователем. Если оно совпадает с меньшим значением, указанным на корпусе двигателя, то применяется соединение треугольником. При более высоком значении используется схема «звезда».
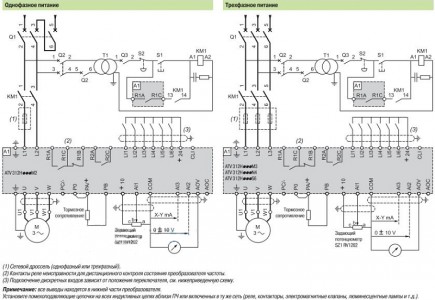
Далее выполняется подключение частотного преобразователя к контроллеру и пульту управления, который входит в комплект поставки. Все соединения осуществляются в соответствии со схемой, приведенной в руководстве по эксплуатации. Рукоятка должна находиться в нейтральном положении, после чего включается автомат. Нормальное включение подтверждается световым индикатором, загорающимся на пульте. Для того чтобы преобразователь заработал, нажимается кнопка RUN, запрограммированная по умолчанию.
После незначительного поворота рукоятки, двигатель начинает постепенно вращаться. Для переключения вращения в обратную сторону, существует специальная кнопка реверса. Затем с помощью рукоятки настраивается нужная частота вращения. На некоторых пультах вместо частоты вращения электродвигателя, отображаются данные о частоте напряжения. Поэтому рекомендуется заранее внимательно изучить интерфейс установленной аппаратуры.
Частотные преобразователи для асинхронных двигателей
Благодаря частотным преобразователям, работа современных асинхронных двигателей отличается высокой эффективностью, устойчивостью и безопасностью. Это особенно важно, поскольку каждый электродвигатель отличается индивидуальными особенностями режима работы. Поэтому оптимизации параметров питания агрегатов с использованием преобразователей частоты придается большое значение. Когда частотный преобразователь выбирается для каких-либо конкретных целей, в этом случае должны обязательно учитываться его рабочие параметры.

Нормальная работа устройства будет зависеть от типа электродвигателя, его мощности, диапазона, скорости и точности регулировок, а также от поддержания стабильного момента вращения вала. Эти показатели имеют первостепенное значение и должны органично сочетаться с габаритами и формой аппарата. Следует обратить особое внимание на то, как расположены элементы управления и будет ли удобно им пользоваться.
Выбирая устройство, необходимо заранее знать, в каких условиях оно будет эксплуатироваться. Если сеть однофазная, то и преобразователь должен быть таким же. То же самое касается и трехфазных аппаратов. Многое зависит от мощности асинхронных двигателей. Если при запуске на валу необходим высокий пусковой момент, то и частотный преобразователь должен быть рассчитан на большее значение тока.
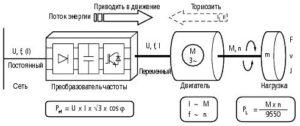
Схема частотного преобразователя асинхронного двигателя
Принцип работы частотного преобразователя
Частотные преобразователи: принцип работы


Схема частотного преобразователя
Регулировка оборотов асинхронного двигателя