Схемы автоматического управления пуском и торможением двигателей постоянного тока
 Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Пуск любого двигателя сопровождается определенными переключениями в силовой цепи и цепи управления. При этом используются релейно-контакторные и бесконтактные аппараты. Для двигателей постоянного тока в целях ограничения пусковых токов в цепи роторов и якорей двигателей включаются пусковые резисторы, которые при разгоне двигателей по ступеням выключаются. Когда пуск закончится, пусковые резисторы полностью шунтируются.
Процесс торможения двигателей также может быть автоматизирован. После команды на торможение с помощью релейно-контакторной аппаратуры осуществляются необходимые переключения в силовых цепях. При подходе к скорости, близкой к нулю, двигатель отключается от сети. В процессе пуска выключение ступеней происходит через определенные интервалы времени либо в зависимости от других параметров. При этом изменяются ток и скорость двигателя.
Управление пуском двигателя осуществляется в функции ЭДС (или скорости), тока, времени и пути.
Типовые узлы и схемы автоматического управления пуском двигателей постоянного тока
Пуск двигателя постоянного тока параллельного или независимого возбуждения осуществляется с резистором, введенным в цепь якоря. Резистор необходим для ограничения пускового тока. По мере разгона двигателя пусковой резистор по ступеням выводится. Когда пуск закончится, резистор будет полностью зашунтирован, и двигатель перейдет работать на естественную механическую характеристику (рис. 1). При пуске двигатель разгоняется по искусственной характеристике 1, затем 2, а после шунтирования резистора — по естественной характеристике 3.
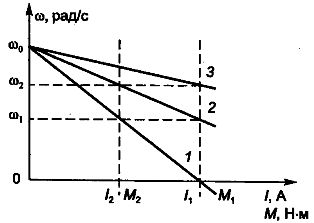
Рис. 1. Механические и электромеханические характеристики двигателя постоянного тока параллельного возбуждения (ω — угловая скорость вращения; I1 М1 — пиковый ток и момент двигателя; I2 М2 — ток и момент переключения)
Рассмотрим узел схемы пуска двигателя постоянного тока (ДПТ) в функции ЭДС (рис. 2).
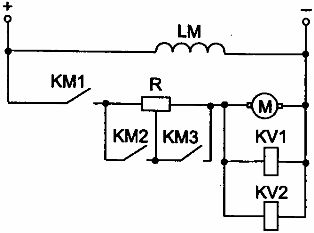
Рис. 2. Узел схемы пуска ДПТ параллельного возбуждения в функции ЭДС
Управление в функции ЭДС (или скорости) осуществляется реле, напряжения и контакторами. Реле напряжения настроены на срабатывание при различных значениях ЭДС якоря. При включении контактора КМ1 напряжение на реле KV в момент пуска недостаточно для срабатывания. По мере разгона двигателя (вследствие роста ЭДС двигателя) срабатывает реле KV1, затем KV2 (напряжения срабатывания реле имеют соответствующие значения); они включают контакторы ускорения КМ2, КМЗ, и резисторы в цепи якоря шунтируются (цепи включения контакторов на схеме не показаны; LM — обмотка возбуждения).
Рассмотрим схему пуска двигателя постоянного тока в функции ЭДС (рис. 3). Угловая скорость двигателя часто фиксируется косвенным путем, т.е. измерением величин, связанных со скоростью. Для двигателя постоянного тока такой величиной является ЭДС. Пуск осуществляется следующим образом. Включается автоматический выключатель QF, обмотка возбуждения двигателя подключается к источнику питания. Срабатывает реле КА и замыкает свой контакт.
Остальные аппараты схемы остаются в исходном положении. Для пуска двигателя необходимо нажать кнопку SB1 «Пуск», после чего контактор КМ1 срабатывает и подключает двигатель к источнику питания. Контактор КМ1 становится на самопитание. Двигатель постоянного тока разгоняется с резистором R цепи якоря двигателя.
По мере увеличения скорости двигателя растет его ЭДС и напряжение на катушках реле KV1 и KV2. При скорости ω1 (см. рис. 1.) срабатывает реле KV1. Оно замыкает свой контакт в цепи контактора КМ2, который срабатывает и закорачивает своим контактом первую ступень пускового резистора. При скорости ω2 срабатывает реле KV2. Своим контактом оно замыкает цепь питания контактора КМЗ, который, срабатывая, контактом закорачивает вторую пусковую ступень пускового резистора. Двигатель выходит на естественную механическую характеристику и заканчивает разбег.
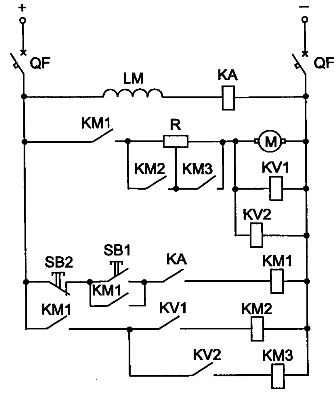
Рис. 3. Схема пуска ДПТ параллельного возбуждения в функции ЭДС
Для правильной работы схемы необходимо настроить реле напряжения KV1 на срабатывание при ЭДС, соответствующей скорости ω1, и реле KV2 на срабатывание при скорости ω2.
Для остановки двигателя следует нажать кнопку SB2 «Стоп». Для обесточивания схемы нужно отключить автоматический выключатель QF.
Управление в функции тока осуществляется с помощью реле тока. Рассмотрим узел схемы пуска двигателя постоянного тока в функции тока. В схеме, приведенной на рис. 4, применяются реле максимального тока, которые срабатывают при пусковом токе I1 и отпадают при минимальном токе I2 (см. рис. 1). Собственное время срабатывания токовых реле должно быть меньше собственного времени срабатывания контактора.
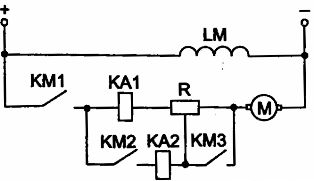
Рис. 4. Узел схемы пуска ДПТ параллельного возбуждения в функции тока
Разгон двигателя начинается при резисторе, полностью введенном в цепь якоря. По мере разгона двигателя ток уменьшается, при токе I2 реле КА1 отпадает и своим контактом замыкает цепь питания контактора КМ2, который своим контактом шунтирует первую пусковую ступень резистора. Аналогично осуществляется закорачивание второй пусковой ступени резистора (реле КА2, контактор КМЗ). Цепи питания контакторов на схеме не показаны. По окончании пуска двигателя резистор в цепи якоря будет зашунтирован.
Рассмотрим схему пуска двигателя постоянного тока в функции тока (рис. 5). Сопротивления ступеней резистора выбираются таким образом, чтобы в момент включения двигателя и шунтирования ступеней ток I1 в цепи якоря и момент М1 не превосходили допустимого уровня.
Пуск двигателя постоянного тока осуществляется включением автоматического выключателя QF и нажатием кнопки SB1 «Пуск». При этом срабатывает контактор КМ1 и замыкает свои контакты. По силовой цепи двигателя проходит пусковой ток I1, под действием которого срабатывает реле максимального тока КА1. Его контакт размыкается, и контактор КМ2 не получает питания.
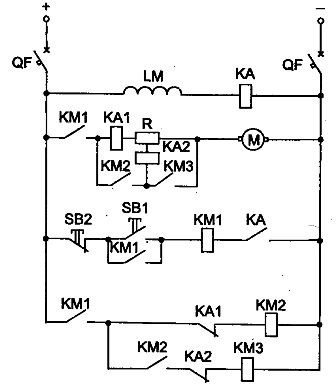
Рис. 5. Схема пуска ДПТ параллельного возбуждения в функции тока
Когда ток уменьшается до минимального значения I2, реле максимального тока КА1 отпадает и замыкает свой контакт. Срабатывает контактор КМ2 и своим главным контактом шунтирует первую секцию пускового резистора и реле КА1. При переключении ток возрастает до значения I1.
При повторном увеличении тока до значения I1 контактор КМ1 не включается, поскольку его катушка зашунтирована контактом КМ2. Под действием тока I1 реле КА2 срабатывает и размыкает свой контакт. Когда в процессе ускорения ток вновь уменьшается до значения I2, реле КА2 отпадает и включается контактор КМЗ. Пуск заканчивается, двигатель работает на естественной механической характеристике.
Для правильной работы схемы необходимо, чтобы время срабатывания реле КА1 и КА2 было меньше времени срабатывания контакторов. Чтобы остановить двигатель, необходимо нажать кнопку SB2 «Стоп» и выключить автоматический выключатель QF для обесточивания схемы.
Управление в функции времени осуществляется с помощью реле времени и соответствующих контакторов, которые своими контактами закорачивают ступени резистора.
Рассмотрим узел схемы пуска двигателя постоянного тока в функции времени (рис. 6). Реле времени КТ срабатывает сразу при появлении напряжения в схеме управления через размыкающий контакт КМ1. После размыкания контакта КМ1 реле времени КТ теряет питание и с выдержкой времени замыкает свой контакт. Контактор КМ2 через промежуток времени, равный выдержке реле времени, получает питание, замыкает свой контакт и шунтирует сопротивление в цепи якоря.
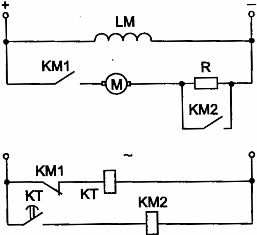
Рис. 6. Узел схемы пуска ДПТ параллельного возбуждения в функции времени
К достоинствам управления в функции времени относятся простота управления, стабильность процесса разгона и торможения, отсутствие задержки электропривода на промежуточных скоростях.
Рассмотрим схему пуска двигателя постоянного тока параллельного возбуждения в функции времени. На рис. 7 приведена схема нереверсивного пуска двигателя постоянного тока параллельного возбуждения. Пуск происходит в две ступени. В схеме используются кнопки SB1 «Пуск» и SB2 «Стоп», контакторы КМ1. КМЗ, электромагнитные реле времени КТ1, КТ2. Включается автоматический выключатель QF. При этом катушка реле времени КТ1 получает питание и размыкает свой контакт в цепи контактора КМ2, Пуск двигателя осуществляется нажатием кнопки SB1 «Пуск». Контактор КМ1 получает питание и своим главным контактом подключает двигатель к источнику питания с резистором в цепи якоря.
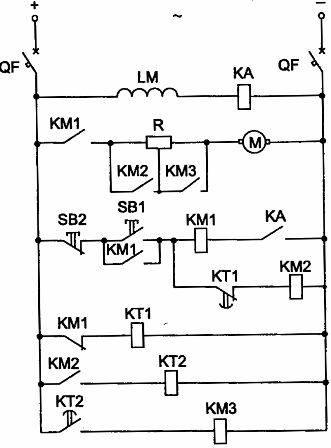
Рис. 7. Схема нереверсивного пуска ДПТ в функции времени
Реле минимального тока КА служит для защиты двигателя от обрыва цепи возбуждения. При нормальной работе реле КА срабатывает и его контакт в цепи контактора КМ1 замыкается, подготавливая контактор КМ1 к работе. При обрыве цепи возбуждения реле КА обесточивается, размыкает свой контакт, затем обесточивается контактор КМ1 и двигатель останавливается. При срабатывании контактора КМ1 замыкается его блокировочный контакт и размыкается контакт КМ1 в цепи реле КТ1, которое обесточивается и замыкает свой контакт с выдержкой времени.
Через промежуток времени, равный выдержке времени реле КТ1, замыкается цепь питания контактора ускорения КМ2, который срабатывает и своим главным контактом закорачивает одну ступень пускового резистора. Одновременно получает питание реле времени КТ2. Двигатель разгоняется. Через промежуток времени, равный выдержке времени реле КТ2, контакт КТ2 замыкается, контактор ускорения КМЗ срабатывает и своим главным контактом закорачивает вторую ступень пускового резистора в цепи якоря. Пуск заканчивается, и двигатель переходит работать на естественную механическую характеристику.
Типовые узлы схем управления торможением двигателей постоянного тока
В системах автоматического управления двигателем постоянного тока применяется динамическое торможение, торможение противовключением и рекуперативное торможение.
При динамическом торможении необходимо обмотку якоря двигателя замкнуть на добавочное сопротивление, а обмотку возбуждения оставить под напряжением. Такое торможение можно осуществить в функции скорости и в функции времени.
Управление в функции скорости (ЭДС) при динамическом торможении можно выполнить по схеме, приведенной на рис. 8. При отключении контактора КМ1 якорь двигателя отключается от сети, но на его зажимах в момент отключения имеется напряжение. Реле напряжения KV срабатывает и замыкает свой контакт в цепи контактора КМ2, который своим контактом замыкает якорь двигателя на резистор R.
При скорости, близкой к нулю, реле KV теряет питание. Дальнейшее торможение от минимальной скорости до полной остановки происходит под действием статического момента сопротивления. Для увеличения эффективности торможения можно применить две или три ступени торможения.
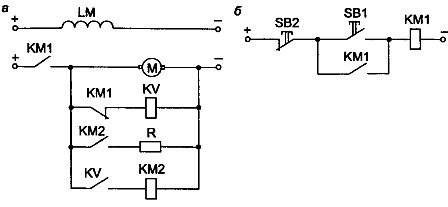
Рис. 8. Узел схемы автоматического управления динамическим торможением в функции ЭДС: а — силовая цепь; б — цепь управления
Динамическое торможение двигателя постоянного тока независимого возбуждения в функции времени осуществляется по схеме, приведенной на рис. 9.
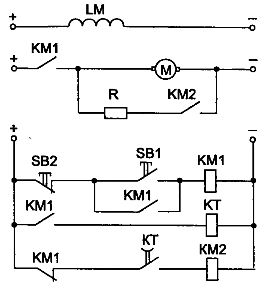
Рис. 9. Узел схемы динамического торможения ДПТ независимого возбуждения в функции времени
При работе двигателя реле времени КТ включено, но цепь контактора торможения КМ2 разомкнута. Для торможения необходимо нажать кнопку SB2 «Стоп». Контактор КМ1 и реле времени КТ теряют питание; срабатывает контактор КМ2, так как контакт КМ1 в цепи контактора КМ2 замыкается, а контакт реле времени КТ размыкается с выдержкой времени.
На время выдержки реле времени контактор КМ2 получает питание, замыкает свой контакт и подключает якорь двигателя к добавочному резистору R. Осуществляется динамическое торможение двигателя. В конце его реле КТ после выдержки времени размыкает свой контакт и отключает контактор КМ2 от сети. Дальнейшее торможение до полной остановки осуществляется под действием момента сопротивления Мс.
При торможении противовключением ЭДС двигателя и напряжение сети действуют согласно. Для ограничения тока в силовую цепь вводится резистор.
Управление возбуждением электродвигателей постоянного тока
Обмотка возбуждения двигателя обладает значительной индуктивностью, и при быстром отключении двигателя на ней может возникнуть большое напряжение, что приведет к пробою изоляции обмотки. Для предотвращения этого можно использовать узлы схем, приведенные на рис. 10. Сопротивление гашения включается параллельно обмотке возбуждения через диод (рис. 10 ,б). Следовательно, после отключения ток через сопротивление проходит кратковременно (рис. 10, а).

Рис. 10. Узлы схем включения сопротивлений гашения: а — сопротивление гашения включается параллельно; б — сопротивление гашения включается через диод.
Защита от обрыва цепи возбуждения осуществляется с помощью реле минимального тока по схеме, показанной на рис. 11.

Рис. 11. Защита от обрыва цепи возбуждения: а — силовая цепь возбуждения; б— цепь управления
При обрыве обмотки возбуждения реле КА теряет питание и отключает цепь контактора КМ.
Способы запуска электродвигателя постоянного тока
Хорошие тяговые характеристики электрических машин постоянного тока сделали их неотъемлемым элементом большинства устройств промышленной и бытовой механизации. Но вместе с тем возникает и существенная проблема значительных пусковых токов, в сравнении с асинхронными электродвигателями, работающих на переменном напряжении. Именно поэтому многие специалисты детально изучают способы запуска электродвигателя постоянного тока, прежде чем включить агрегат.
Прямой пуск
Из всех электродвигателей постоянного тока основная градация при выборе способа их запуска должна учитывать мощность устройства.
В целом выделяют три вида пуска:
- малой мощности;
- средней;
- большой мощности.
Для прямого запуска подойдут только маломощные электродвигатели, которые потребляют до 1кВт электроэнергии в сети. При прямых запусках электродвигателя все напряжение сразу подается на рабочую обмотку. Это обуславливает возникновение максимального пускового тока из-за отсутствия естественной компенсации за счет ЭДС противодействия.
С физической точки зрения ситуация в обмотках ротора будет выглядеть следующим образом: в момент подачи напряжения сила тока в обмотках равна нулю, поэтому его значение будет определяться по формуле:
U – приложенная к выводам номинальное напряжение, Rобм – сопротивление катушки.
В этот момент величина токовой нагрузки электродвигателя постоянного тока является максимальной, он может отличаться от номинального значения в 1,5 – 2,5 раза. После этого протекание тока обуславливает генерацию ЭДС противодействия, которая компенсирует пусковую нагрузку до установки номинальной мощности, тогда ток станет:
В мощных устройствах сопротивление обмоток якоря может равняться 1 или 0,5 Ом, из-за чего ток при запуске электродвигателя может достигнуть 200 – 500 А, что в 10 – 50 раз будет превышать допустимые величины. Это, в свою очередь, может привести к термическому отпуску металла, деформации проводников, разрушению колец или щеток скользящего контакта. Поэтому двигатели постоянного тока средней и большой мощности должны вводиться в работу реостатным запуском или путем подачи заведомо пониженного напряжения, прямой пуск для них крайне опасен.
Пуск с помощью пускового реостата
В этом случае в цепь вводится переменное сопротивление, которое на начальном этапе обеспечивает снижение токовой нагрузки, пока вращение ротора не достигнет установленных оборотов. По мере стабилизации ампеража до стандартной величины в реостате уменьшается сопротивление от максимального значения до минимального.
Расчет электрической величины в этом случае будет производиться по формуле:
В лабораторных условиях уменьшение нагрузки может производиться вручную – посредством перемещения ползунка реостата. Однако в промышленности такой метод не получил широкого распространения, так как процесс не согласовывается с токовыми величинами. Поэтому применяется регулировка по току, по ЭДС или по времени, в первом случае задействуется измерение величины в обмотках возбуждения, во втором, на каждую ступень применяется выдержка времени.
Оба метода используются для запуска электродвигателей:
- с последовательным;
- с параллельным возбуждением;
- с независимым возбуждением.
Запуск ДПТ с параллельным возбуждением
Такой запуск электродвигателя осуществляется посредством включения и обмотки возбуждения, и якорной к напряжению питания электросети, друг относительно друга они располагаются параллельно. То есть каждая из обмоток электродвигателя постоянного тока находятся под одинаковой разностью потенциалов. Этот метод запуска обеспечивает жесткий режим работы, используемый в станочном оборудовании. Токовая нагрузка во вспомогательной обмотке при запуске имеет сравнительно меньший ток, чем обмотки статора или ротора.
Для контроля пусковых характеристик сопротивления вводятся в обе цепи:
 Рис 1. Запуск ДПТ с параллельным возбуждением
Рис 1. Запуск ДПТ с параллельным возбуждением
На начальном этапе вращения вала позиции реостата обеспечивают снижение нагрузки на электродвигатель, а затем их обратно выводят в положение нулевого сопротивления. При затяжных запусках выполняется автоматизация и комбинация нескольких ступеней пусковых реостатов или отдельных резисторов, пример такой схемы включения приведен на рисунке ниже:
 Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
Рис. 2. Ступенчатый пуск двигателя параллельного возбуждения
- При подаче напряжения питания на электродвигатель ток, протекающий через рабочие обмотки и обмотку возбуждения, за счет магазина сопротивлений Rпуск1, Rпуск2, Rпуск3 нагрузка ограничивается до минимальной величины.
- После достижения порогового значения минимума токовой величины происходит последовательное срабатывание реле K1, K2, K3.
- В результате замыкания контактов реле K1.1 шунтируется первый резистор, рабочая характеристика в цепи питания электродвигателя скачкообразно повышается.
- Но после снижения ниже установленного предела замыкаются контакты K2.2 и процесс повторяется снова, пока электрическая машина не достигнет номинальной частоты вращения.
Торможение электродвигателя постоянного тока может производиться в обратной последовательности за счет тех же резисторов.
Запуск ДПТ с последовательным возбуждением
На рисунке выше приведена принципиальная схема подключения электродвигателя с последовательным возбуждением. Ее отличительная особенность заключается в последовательном соединении катушки возбуждения Lвозбуждения и непосредственно мотора, переменное сопротивление Rякоря также вводится последовательно.
По цепи обеих катушек протекает одинаковая токовая величина, эта схема обладает хорошими параметрами запуска, поэтому ее часто используют в электрическом транспорте. Такой электродвигатель запрещено включать без усилия на валу, а регулирование частоты осуществляется в соответствии с нагрузкой.
Пуск ДПТ с независимым возбуждением
Подключение электродвигателя в цепь с независимым возбуждением производится путем ее запитки от отдельного источника.
 Рис. 4. Запуск ДПТ с независимым возбуждением
Рис. 4. Запуск ДПТ с независимым возбуждением
На схеме приведен пример независимого подключения, здесь катушка Lвозбуждения и сопротивление в ее цепи Rвозбуждения получают питание отдельно от обмоток двигателя током независимого устройства. Для обмоток двигателя также включается регулировочный реостат Rякоря. При этом способе запуска машина постоянного тока не должна включаться без нагрузки или с минимальным усилием на валу, так как это приведет к нарастанию оборотов и последующей поломке.
Пуск путем изменения питающего напряжения
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
 Рис. 5. Схема пуска с изменением питающего напряжения
Рис. 5. Схема пуска с изменением питающего напряжения