Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
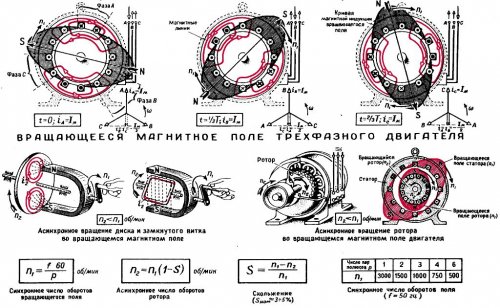
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших «короткозамкнутых» двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите — Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства — частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя — небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.
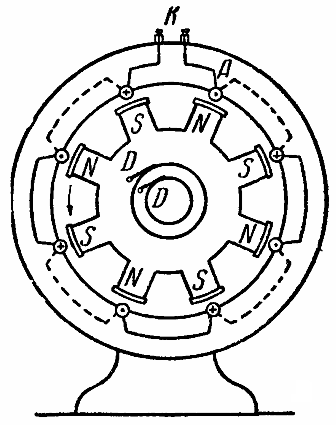
В теле статора размещена обмотка якоря. Ее длинные рабочие «активные» проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:
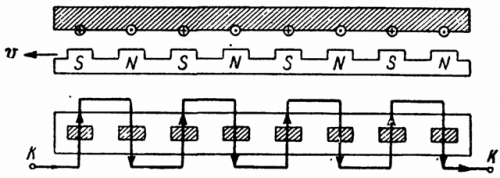
Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.
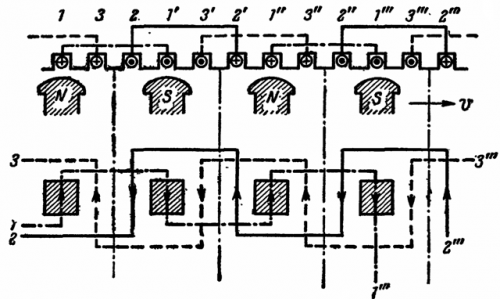
Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами — турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.
Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях). 
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он «выпадет из синхронизма» и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение
Устройство электродвигателя переменного тока
Электрические двигатели – это силовые машины, применяющиеся для превращения электрической энергии в механическую. Общая классификация разделяет их по типу питающего тока на двигатели постоянного и переменного тока. В статье ниже рассматриваются электрические двигатели со спецификацией под переменный ток, их виды, отличительные характеристики и преимущества.
Для общей информации, рекомендуем прочитать нашу отдельную статью о принципах работы электродвигателей.

Принцип преобразования энергии
Среди электрических двигателей, применяемых во всех отраслях промышленности и бытовых электроприборах, наибольшее распространение имеют двигатели переменного тока. Они встречаются практически в каждой сфере жизнедеятельности – от детских игрушек и стиральных машин до автомобилей и мощных производственных станков.
Принцип работы всех электрических двигателей основывается на законе электромагнитной индукции Фарадея и законе Ампера. Первый из них описывает ситуацию, когда на замкнутом проводнике, находящемся в изменяющемся магнитном поле, генерируется электродвижущая сила. В двигателях это поле создается через обмотки статора, по которым протекает переменный ток. Внутри статора (представляющего собой корпус устройства) находится подвижный элемент двигателя – ротор. На нем и возникает ток.
Вращение ротора объясняется законом Ампера, который утверждает, что на электрические заряды, протекающие по проводнику, находящемуся внутри магнитного поля, действует сила, движущая их в плоскости, перпендикулярной силовым линиям этого поля. Проще говоря, проводник, которым в конструкции двигателя является ротор, начинает вращаться вокруг своей оси, а закрепляется он на валу, к которому подключаются рабочие механизмы оборудования.
Виды двигателей и их устройство
Электрические двигатели переменного тока имеют различное устройство, благодаря которому можно создавать машины с одинаковой частотой вращения ротора относительно магнитного поля статора, и такие машины, где ротор «отстает» от вращающегося поля. По данному принципу эти двигатели разделяют на соответствующие типы: синхронные и асинхронные.
Асинхронные
Основу конструкции асинхронного электродвигателя составляет пара важнейших функциональных частей:
- Статор – блок цилиндрической формы, сделанный из листов стали с пазанми для укладки токопроводящих обмоток, оси которых располагаются под углом 120˚ относительно друг друга. Полюса обмоток уходят на клеммную коробку, где подключаются разными способами, в зависимости от необходимых параметров работы электродвигателя.
- Ротор. В конструкции асинхронных электродвигателей используются роторы двух видов:
- Короткозамкнутый. Называется так, потому что изготавливается из нескольких алюминиевых или медных стержней, накоротко замкнутых с помощью торцевых колец. Эта конструкция, представляющая собой токоповодящую обмотку ротора, называется в электромеханике «беличьей клеткой».
- Фазный. На роторах данного типа устанавливается трехфазная обмотка, похожая на обмотку статора. Чаще всего концы её проводников идут в клеммную площадку, где соединяются «звездой», а свободные концы подключаются к контактным кольцам. Фазный ротор позволяет с помощью щеток добавить в цепь обмотки добавочный резистор, позволяющий изменять сопротивление для уменьшения пусковых токов.
Помимо описанных ключевых элементов асинхронного электродвигателя, в его конструкцию также входит вентилятор для охлаждения обмоток, клеммная коробка и вал, передающий генерируемое вращение на рабочие механизмы оборудования, работа которого обеспечивается данным двигателем.
Работа асинхронных электрических двигателей основывается на законе электромагнитной индукции, утверждающем, что электродвижущая сила может возникнуть лишь в условиях разности скоростей вращения ротора и магнитного поля статора. Таким образом, если бы эти скорости были равны, ЭДС не могла бы появиться, но воздействие на вал таких «тормозящих» факторов, как нагрузка и трение подшипников, всегда создает достаточные для работы условия.
Синхронные
Конструкция синхронных электродвигателей переменного тока несколько отлична от устройства асинхронных аналогов. В этих машинах ротор крутится вокруг своей оси со скоростью, равной скорости вращения магнитного поля статора. Ротор или якорь этих устройств тоже оснащается обмотками, которые одними концами подключены друг к другу, а другими – к вращающемуся коллектору. Контактные площадки на коллекторе смонтированы так, что в определенный момент времени возможна подача питания через графитовые щетки лишь на два противоположных контакта.
Принцип работы синхронных электродвигателей:
- При взаимодействии магнитного потока в обмотке статора с током ротора возникает вращающий момент.
- Направление движения магнитного потока изменяется одновременно с направлением переменного тока, благодаря чему сохраняется вращение выходного вала в одну сторону.
- Настройка нужной частоты вращения осуществляется регулировкой входящего напряжения. Чаще всего, в быстроходном оборудовании, например, перфораторах и пылесосах, эту функцию выполняет реостат.
Чаще всего причинами выхода синхронных электродвигателей из строя является:
- износ графитовых щеток или ослабление прижимной пружины;
- износ подшипников вала;
- загрязнение коллектора (чистится наждачной бумагой или спиртом).
История изобретения
Изобретение простейшего способа преобразования энергии из электрической в механическую принадлежит Майклу Фарадею. В 1821 году этот великий английский ученый провел эксперимент с проводником, опущенным в сосуд с ртутью, на дне которого лежал постоянный магнит. После подачи электричества на проводник он приходил в движение, вращаясь соответственно силовым линиями магнитного поля. В наши дни этот опыт часто проводят на уроках физики, заменяя ртуть рассолом.
Дальнейшее изучение вопроса привело к созданию Питером Барлоу в 1824 году униполярного двигателя, названного колесом Барлоу. В его конструкцию входят два зубчатых колеса из меди, расположенных на одной оси между постоянными магнитами. После подачи тока на колеса, в результате его взаимодействия с магнитными полями, колеса начинают вращаться. Во время опытов ученый установил, что направление вращения можно изменить, поменяв полярность (перестановкой магнитов или контактов). Практического применения «колесо Барлоу», но сыграло важную роль в изучении взаимодействия магнитных полей и заряженных проводников.
Первый рабочий образец устройства, ставшего прародителем современных двигателей, был создан русским физиком Борисом Семеновичем Якоби в 1834 году. Принцип использования вращающегося ротора в магнитном поле, продемонстрированный в этом изобретении, практически в неизменном виде применяется современных двигателях постоянного тока.
А вот создание первого двигателя с асинхронным принципом работы принадлежит сразу двум ученым – Николе Тесла и Галилео Феррарис, по удачному стечению обстоятельств продемонстрировавшим свои изобретения в один год (1888). Через несколько лет двухфазный бесколлекторный двигатель переменного тока, созданный Николой Тесла уже использовался на нескольких электростанциях. В 1889 году русский электротехник Михаил Осипович Доливо-Добровольский усовершенствовал изобретение Теслы для работы в трехфазной сети, благодаря чему смог создать первый асинхронный двигатель переменного тока мощностью более 100 Вт. Ему же принадлежит изобретение используемых сегодня способов подключения фаз в трехфазных электродвигателях: «звезда» и «треугольник», пусковых реостатов и трехфазных трансформаторов.
Подключение к однофазным и трехфазным источникам питания
По типу питающей сети электродвигатели переменного тока классифицируют на одно- и трехфазные.
Подключение асинхронных однофазных двигателей осуществляет очень легко – для этого достаточно подвести к двум выходам на корпусе фазный и нулевой провод однофазной 220В сети. Синхронные двигатели тоже можно запитывать от сети данного типа, однако подключение немного сложнее – необходимо соединить обмотки ротора и статора так, чтобы их контакты однополюсного намагничивания были расположены напротив друг друга.
Подключение к трехфазной сети представляется несколько более сложным. В первую очередь, следует обратить внимание, что клеммная коробка содержит 6 выводов – по паре на каждую из трех обмоток. Во-вторых, это дает возможность использовать один из двух способов подключения («звезда» и «треугольник»). Неправильное подключение может привести в поломке двигатель от расплавления обмоток статора.
Главное функциональное отличие «звезды» и «треугольника» заключается в различном потреблении мощности, что сделано для возможности включения машины в трехфазные сети с различным линейным напряжением — 380В или 660В. В первом случае следует соединять обмотки по схеме «треугольник», а во втором – «звездой». Такое правило включения позволяет в обоих случаях иметь напряжение 380В на обмотках каждой фазы.
На панели подключения выводы обмоток располагаются таким образом, чтобы перемычки, используемых для включения, не перекрещивались между собой. Если коробка выводов двигателя содержит только три зажима, значит, он рассчитан для работы от одного напряжения, которое указано в технической документации, а обмотки соединены между собой внутри устройства.
Преимущества и недостатки электрических двигателей переменного тока
В наши дни среди всех электродвигателей устройства для переменного тока занимают лидирующую позицию по объему использования в силовых установках. Они обладают низкой себестоимостью, простой в обслуживании конструкцией и КПД не менее 90%. Кроме того, их устройство позволяет плавно изменять скорость вращения, не прибегая к помощи дополнительного оборудования вроде коробок передач.
Главным недостатком двигателей переменного тока с асинхронным принципом работы является тот факт, что регулировать их частоту вращения вала можно только изменяя входную частоту тока. Это не позволяет добиться постоянной скорости вращения, а также снижает мощность. Для асинхронных электродвигателей характерны высокие пусковые токи, но низкий пусковой момент. Для исправления этих недостатков применяется частотный привод, однако его цена противоречит одному из главных достоинств этих двигателей – низкой себестоимости.
Слабым местом синхронного двигателя является его сложная конструкция. Графитовые щетки довольно быстро выходят из строя под нагрузкой, а также теряют плотный контакт с коллектором из-за ослабления прижимной пружины. Кроме того, эти двигатели, как и асинхронные аналоги, не защищены от износа подшипников вала. К недостаткам также относится более сложный пуск, необходимость наличия источника постоянного тока и исключительно частотная регулировка частоты вращения.
Применение
На сегодняшний день электродвигатели со спецификацией на переменный ток распространены во всех сферах промышленности и жизнедеятельности. На электростанциях они устанавливаются в качестве генераторов, используются в производственном оборудовании, автомобилестроении и даже бытовой технике. Сегодня в каждом доме можно встретить как минимум одно устройство с электрическим двигателем переменного тока, например, стиральную машину. Причины столь большой популярности заключаются в универсальности, долговечности и легкости обслуживания.
Среди асинхронных электрических машин наибольшее распространение получили устройства с трехфазной спецификацией. Они являются наилучшим вариантом для использования во многих силовых агрегатах, генераторах и высокомощных установках, работа которых связана с необходимостью контроля скорости вращения вала.