Использование драйвера ключей нижнего и верхнего уровней IR2110 — объяснение и примеры схем

Быть может, после прочтения этой статьи вам не придётся ставить такие же по размерам радиаторы на транзисторы.
Перевод этой статьи.
Во-первых, в данном переводе могут быть серьёзные проблемы с переводом терминов, я не занимался электротехникой и схемотехникой достаточно, но всё же что-то знаю; также я пытался перевести всё максимально понятно, поэтому не использовал такие понятия, как бутсрепный, МОП-транзистор и т.п. Во-вторых, если орфографически сейчас уже сложно сделать ошибку (хвала текстовым процессорам с указанием ошибок), то ошибку в пунктуации сделать довольно-таки просто.
И вот по этим двум пунктам прошу пинать меня в комментариях как можно сильнее.
Теперь поговорим уже больше о теме статьи — при всём многообразии статей о построении различных транспортных средств наземного вида (машинок) на МК, на Arduino, на , само проектирование схемы, а тем более схемы подключения двигателя не описывается достаточно подробно. Обычно это выглядит так:
— берём двигатель
— берём компоненты
— подсоединяем компоненты и двигатель
— …
— PROFIT!1!
Но для построения более сложных схем, чем для простого кручения моторчика с ШИМ в одну сторону через L239x, обычно требуется знание о полных мостах (или H-мостах), о полевых транзисторах (или MOSFET), ну и о драйверах для них. Если ничто не ограничивает, то можно использовать для полного моста p-канальные и n-канальные транзисторы, но если двигатель достаточно мощный, то p-канальные транзисторы придётся сначала обвешивать большим количеством радиаторов, потом добавлять кулеры, ну а если совсем их жалко выкидывать, то можно попробовать и другие виды охлаждения, либо просто использовать в схеме лишь n-канальные транзисторы. Но с n-канальными транзисторами есть небольшая проблема — открыть их «по-хорошему» подчас бывает довольно сложно.
Поэтому я искал что-нибудь, что мне поможет с составлением правильной схемы, и я нашёл статью в блоге одного молодого человека, которого зовут Syed Tahmid Mahbub. Этой статьёй я и решил поделится.
Во многих ситуациях мы должны использовать полевые транзисторы как ключи верхнего уровня. Также во многих ситуациях мы должны использовать полевые транзисторы как ключи как и верхнего, так и нижнего уровней. Например, в мостовых схемах. В неполных мостовых схемах у нас есть 1 MOSFET верхнего уровня и 1 MOSFET нижнего уровня. В полных мостовых схемах мы имеем 2 MOSFETа верхнего уровня и 2 MOSFETа нижнего уровня. В таких ситуациях нам понадобится использовать драйвера как высокого, так и низкого уровней вместе. Наиболее распространённым способом управления полевыми транзисторами в таких случаях является использование драйвера ключей нижнего и верхнего уровней для MOSFET. Несомненно, самым популярным микросхемой-драйвером является IR2110. И в этой статье/учебнике я буду говорить о именно о нём.
Вы можете загрузить документацию для IR2110 с сайта IR. Вот ссылка для загрузки: http://www.irf.com/product-info/datasheets/data/ir2110.pdf
Давайте для начала взглянем на блок-схему, а также описание и расположение контактов:
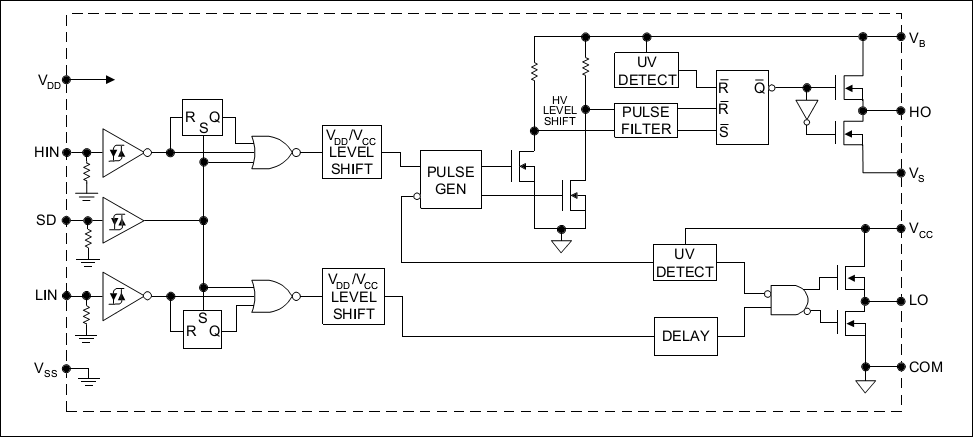
Рисунок 1 — Функциональная блок-схема IR2110
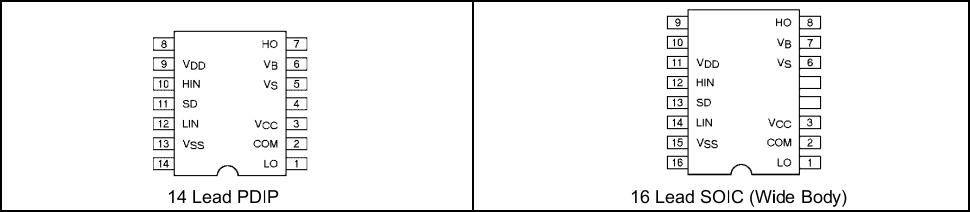
Рисунок 2 — Распиновка IR2110
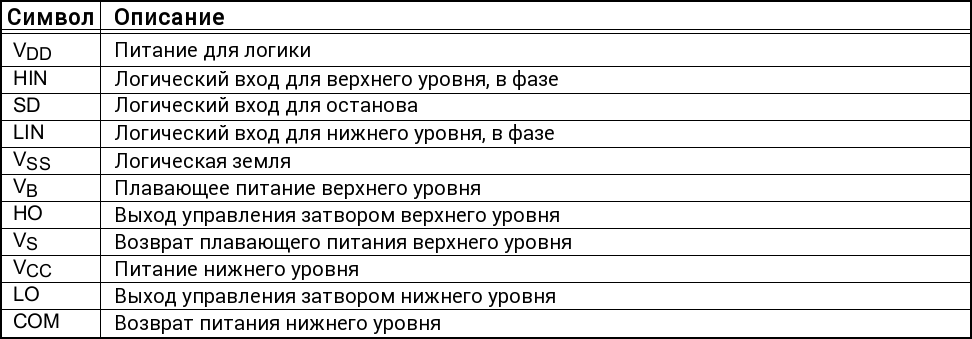
Рисунок 3 — Описание пинов IR2110
Также стоит упомянуть, что IR2110 выпускается в двух корпусах — в виде 14-контактного PDIP для выводного монтажа и 16-контактного SOIC для поверхностного монтажа.
Теперь поговорим о различных контактах.
VCC — это питание нижнего уровня, должно быть между 10В и 20В. VDD — это логическое питание для IR2110, оно должно быть между +3В и +20В (по отношению к VSS). Фактическое напряжение, которое вы выберете для использования, зависит от уровня напряжения входных сигналов. Вот график:
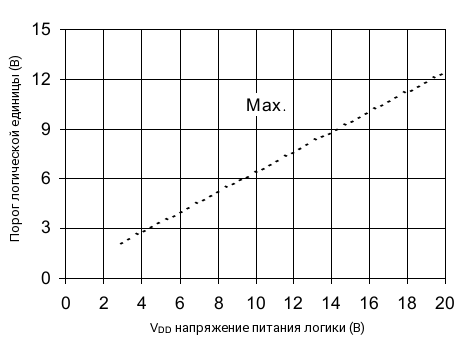
Рисунок 4 — Зависимость логической 1 от питания
Обычно используется VDD равное +5В. При VDD = +5В, входной порог логической 1 немного выше, чем 3В. Таким образом, когда напряжение VDD = +5В, IR2110 может быть использован для управления нагрузкой, когда вход «1» выше, чем 3 (сколько-то) вольт. Это означает, что IR2110 может быть использован почти для всех схем, так как большинство схем, как правило, имеют питание примерно 5В. Когда вы используете микроконтроллеры, выходное напряжение будет выше, чем 4В (ведь микроконтроллер довольно часто имеет VDD = +5В). Когда используется SG3525 или TL494 или другой ШИМ-контроллер, то, вероятно, придётся их запитывать напряжением большим, чем 10В, значит на выходах будет больше, чем 8В, при логической единице. Таким образом, IR2110 может быть использован практически везде.
Вы также можете снизить VDD примерно до +4В, если используете микроконтроллер или любой чип, который даёт на выходе 3.3В (например, dsPIC33). При проектировании схем с IR2110, я заметил, что иногда схема не работает должным образом, когда VDD у IR2110 был выбран менее + 4В. Поэтому я не рекомендую использовать VDD ниже +4В. В большинстве моих схем уровни сигнала не имеют напряжение меньше, чем 4В как «1», и поэтому я использую VDD = +5V.
Если по каким-либо причинам в схеме уровень сигнала логической «1» имеет напряжение меньшее, чем 3В, то вам нужно использовать преобразователь уровней/транслятор уровней, он будет поднимать напряжение до приемлемых пределов. В таких ситуациях я рекомендую повышение до 4В или 5В и использование у IR2110 VDD = +5В.
Теперь давайте поговорим о VSS и COM. VSS это земля для логики. COM это «возврат низкого уровня» — в основном, заземление низкого уровня драйвера. Это может выглядеть так, что они являются независимыми, и можно подумать что, пожалуй, было бы возможно изолировать выходы драйвера и сигнальную логику драйвера. Тем не менее, это было бы неправильно. Несмотря на то что внутренне они не связаны, IR2110 является неизолированным драйвером, и это означает, что VSS и COM должны быть оба подключены к земле.
HIN и LIN это логические входы. Высокий сигнал на HIN означает, что мы хотим управлять верхним ключом, то есть на HO осуществляется вывод высокого уровня. Низкий сигнал на HIN означает, что мы хотим отключить MOSFET верхнего уровня, то есть на HO осуществляется вывод низкого уровня. Выход в HO, высокий или низкий, считается не по отношению к земле, а по отношению к VS. Мы скоро увидим, как усилительные схемы (диод + конденсатор), используя VCC, VB и VS, обеспечивают плавающее питания для управления MOSFETом. VS это плавающий возврат питания. При высоком уровне, уровень на HO равен уровню на VB, по отношению к VS. При низком уровне, уровень на HO равнен VS, по отношению к VS, фактически нулю.
Высокий сигнал LIN означает, что мы хотим управлять нижним ключом, то есть на LO осуществляется вывод высокого уровня. Низкий сигнал LIN означает, что мы хотим отключить MOSFET нижнего уровня, то есть на LO осуществляется вывод низкого уровня. Выход в LO считается относительно земли. Когда сигнал высокий, уровень в LO такой же как и в VCC, относительно VSS, фактически земля. Когда сигнал низкий, уровень в LO такой же как и в VSS, относительно VSS, фактически нуль.
SD используется в качестве контроля останова. Когда уровень низкий, IR2110 включен — функция останова отключена. Когда этот вывод является высоким, выходы выключены, отключая управление IR2110.
Теперь давайте взглянем на частые конфигурации с IR2110 для управления MOSFETами как верхних и нижних ключей — на полумостовые схемы.
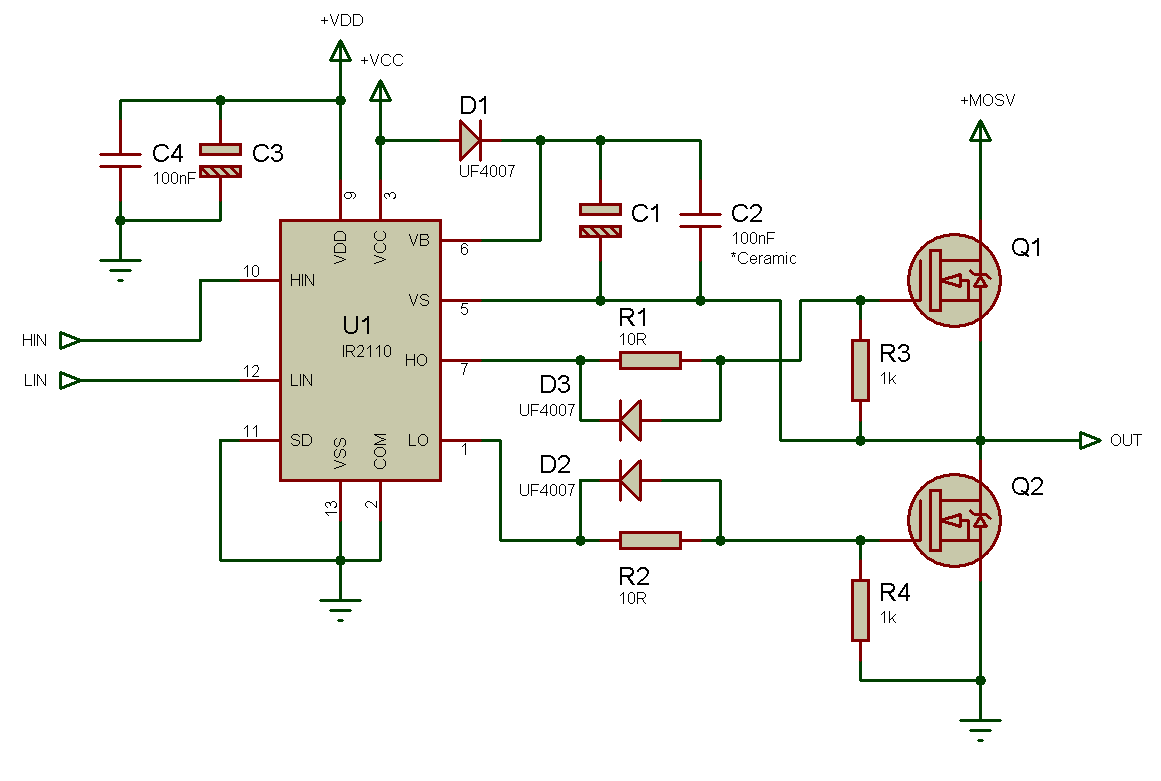
Рисунок 5 — Базовая схема на IR2110 для управления полумостом
D1, C1 и C2 совместно с IR2110 формируют усилительную цепь. Когда LIN = 1 и Q2 включен, то C1 и С2 заряжаются до уровня VB, так как один диод расположен ниже +VCC. Когда LIN = 0 и HIN = 1, заряд на C1 и С2 используется для добавления дополнительного напряжения, VB в данном случае, выше уровня источника Q1 для управления Q1 в конфигурации верхнего ключа. Достаточно большая ёмкость должна быть выбрана у C1 для того чтобы её хватило для обеспечения необходимого заряда для Q1, чтобы Q1 был включён всё это время. C1 также не должен иметь слишком большую ёмкость, так как процесс заряда будет проходить долго и уровень напряжения не будет увеличиваться в достаточной степени чтобы сохранить MOSFET включённым. Чем большее время требуется во включённом состоянии, тем большая требуется ёмкость. Таким образом меньшая частота требует большую ёмкость C1. Больший коэффициент заполнения требует большую ёмкость C1. Конечно есть формулы для расчёта ёмкости, но для этого нужно знать множество параметров, а некоторые из них мы может не знать, например ток утечки конденсатора. Поэтому я просто оценил примерную ёмкость. Для низких частот, таких как 50Гц, я использую ёмкость от 47мкФ до 68мкФ. Для высоких частот, таких как 30-50кГц, я использую ёмкость от 4.7мкФ до 22мкФ. Так как мы используем электролитический конденсатор, то керамический конденсатор должен быть использован параллельно с этим конденсатором. Керамический конденсатор не обязателен, если усилительный конденсатор — танталовый.
D2 и D3 разряжают затвор MOSFETов быстро, минуя затворные резисторы и уменьшая время отключения. R1 и R2 это токоограничивающие затворные резисторы.
+MOSV может быть максимум 500В.
+VCC должен идти с источника без помех. Вы должны установить фильтрующие и развязочные конденсаторы от +VCC к земле для фильтрации.
Давайте теперь рассмотрим несколько примеров схем с IR2110.
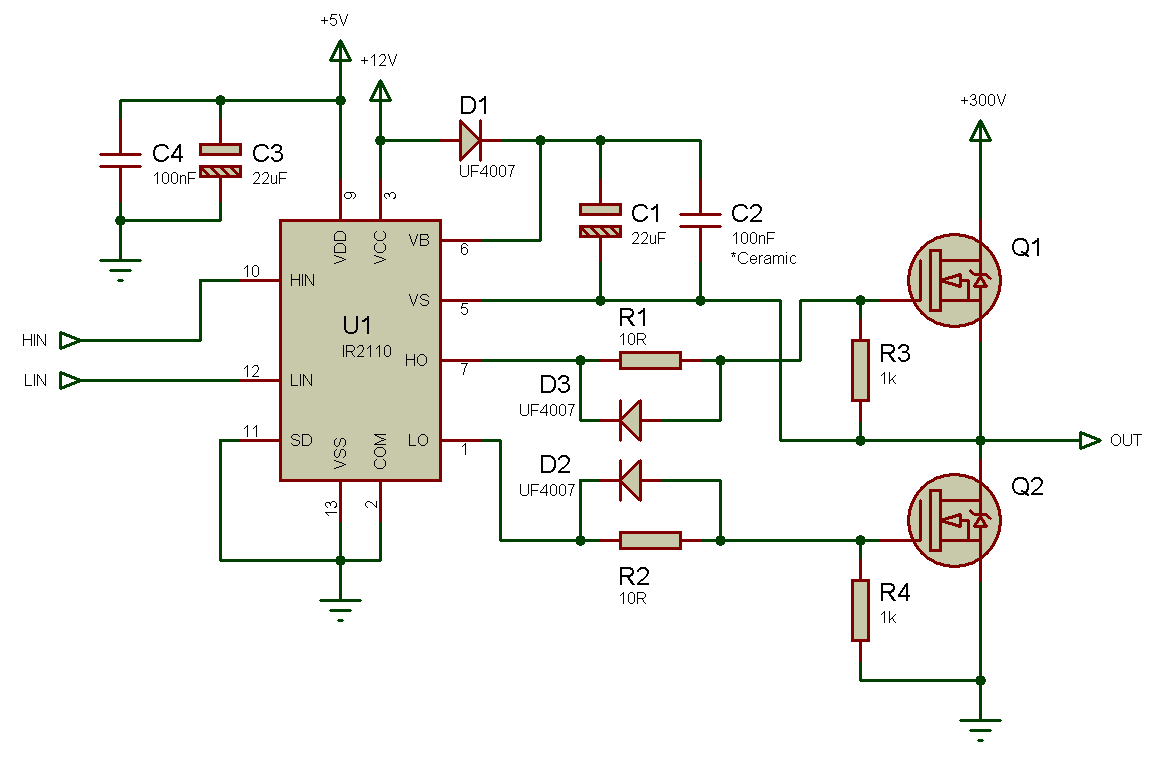
Рисунок 6 — Схема с IR2110 для высоковольтного полумоста
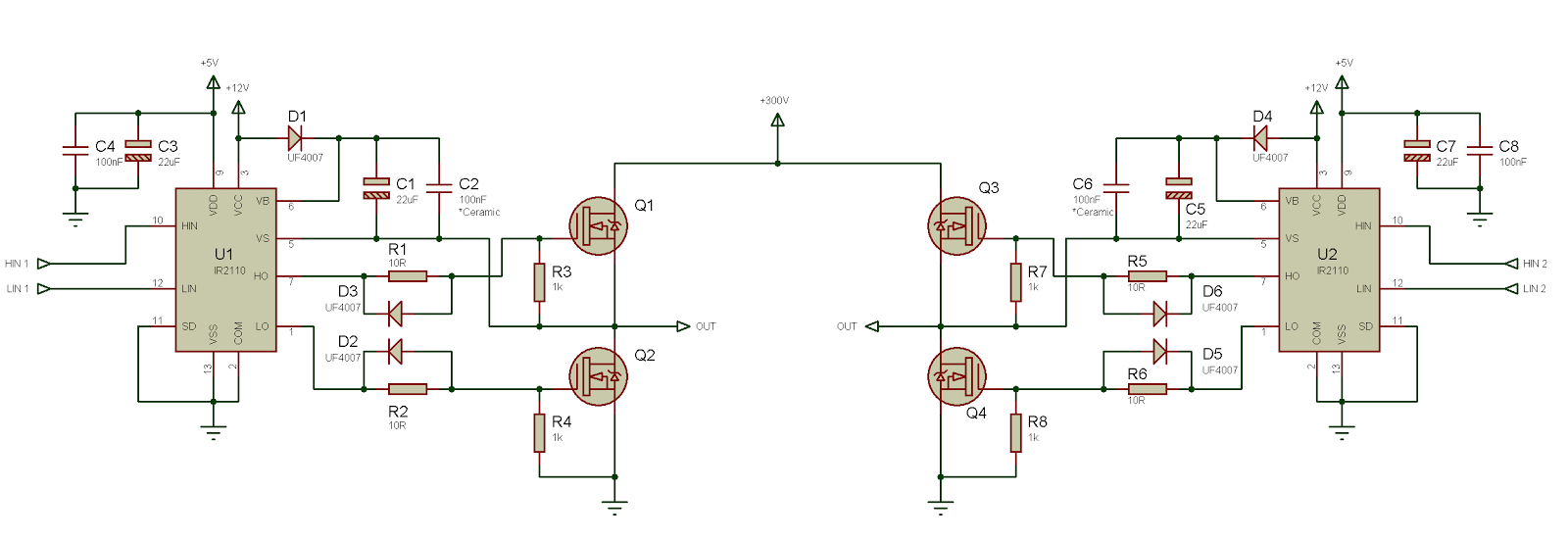
Рисунок 7 — Схема с IR2110 для высоковольтного полного моста с независимым управлением ключами (кликабельно)
На рисунке 7 мы видим IR2110, использованный для управления полным мостом. В ней нет ничего сложного и, я думаю, уже сейчас вы это понимаете. Также тут можно применить достаточно популярное упрощение: HIN1 мы соединяем с LIN2, а HIN2 мы соединяем с LIN1, тем самым мы получаем управление всеми 4 ключами используя всего 2 входных сигнала, вместо 4, это показано на рисунке 8.
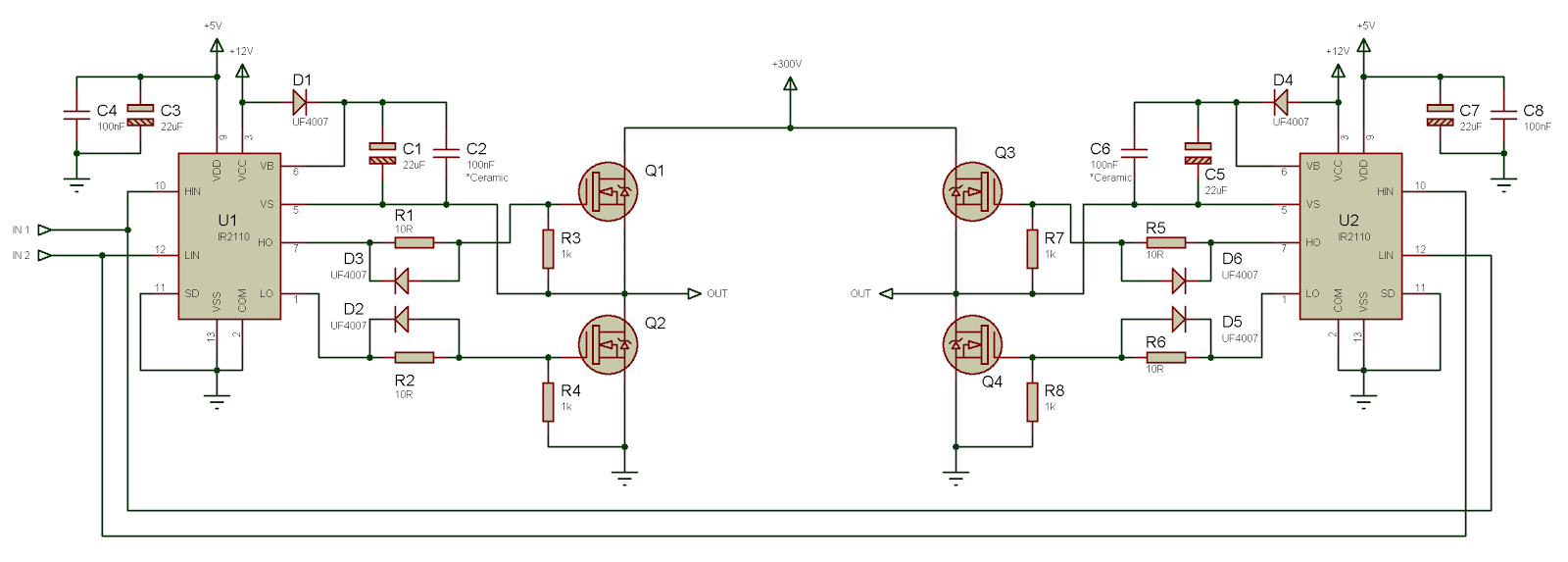
Рисунок 8 — Схема с IR2110 для высоковольтного полного моста с управлением ключами двумя входами (кликабельно)
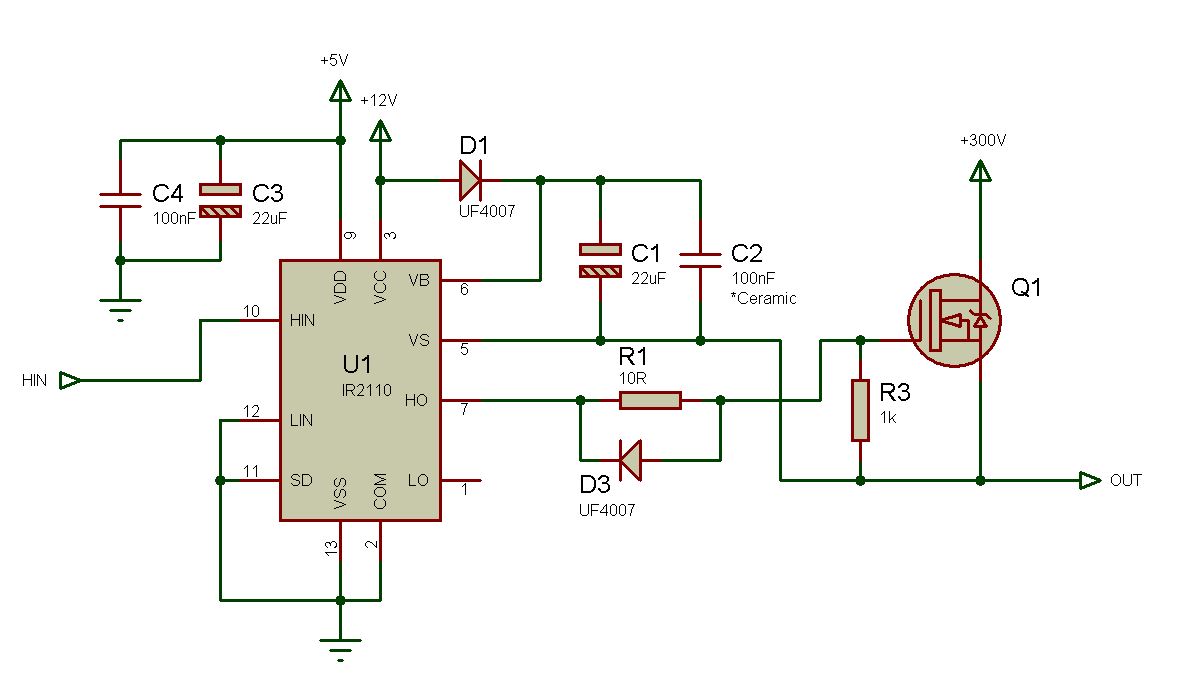
Рисунок 9 — Схема с IR2110 как высоковольтного драйвера верхнего уровня
На рисунке 9 мы видим IR2110 использованный как драйвер верхнего уровня. Схема достаточно проста и имеет такую же функциональность как было описано выше. Есть вещь которую нужно учесть — так как мы больше не имеем ключа нижнего уровня, то должна быть нагрузка подключённая с OUT на землю. Иначе усилительный конденсатор не сможет зарядится.
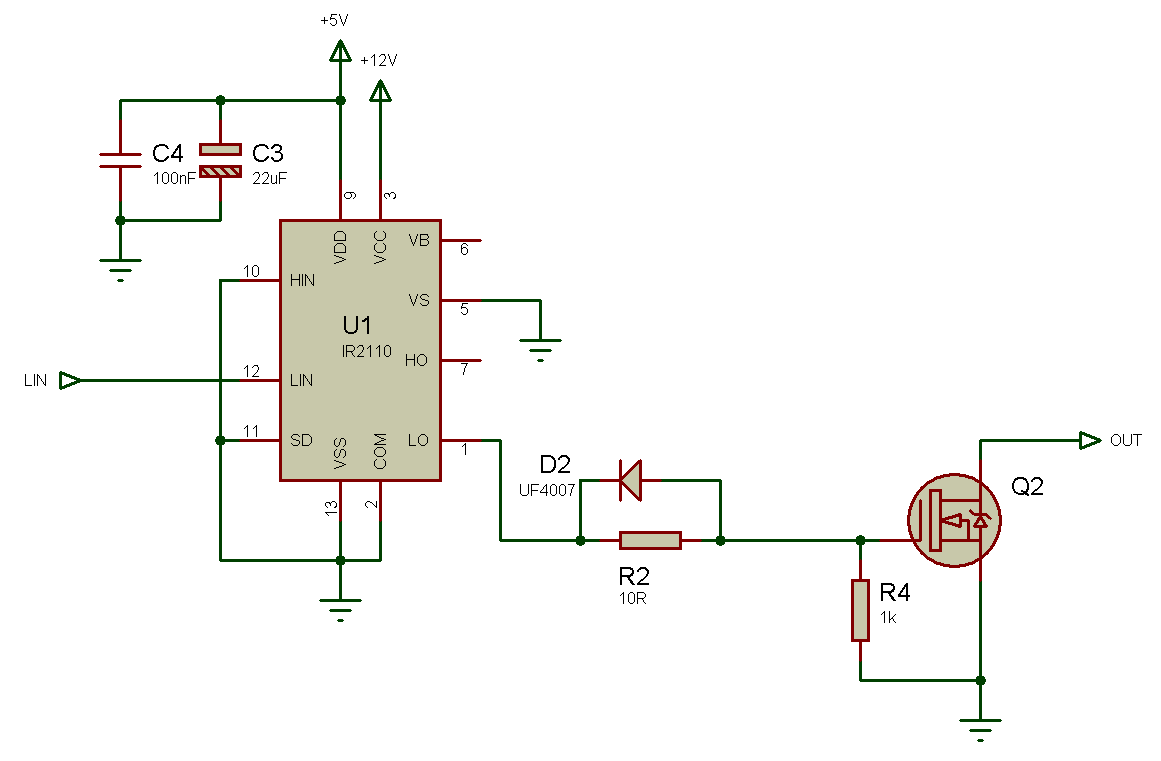
Рисунок 10 — Схема с IR2110 как драйвера нижнего уровня
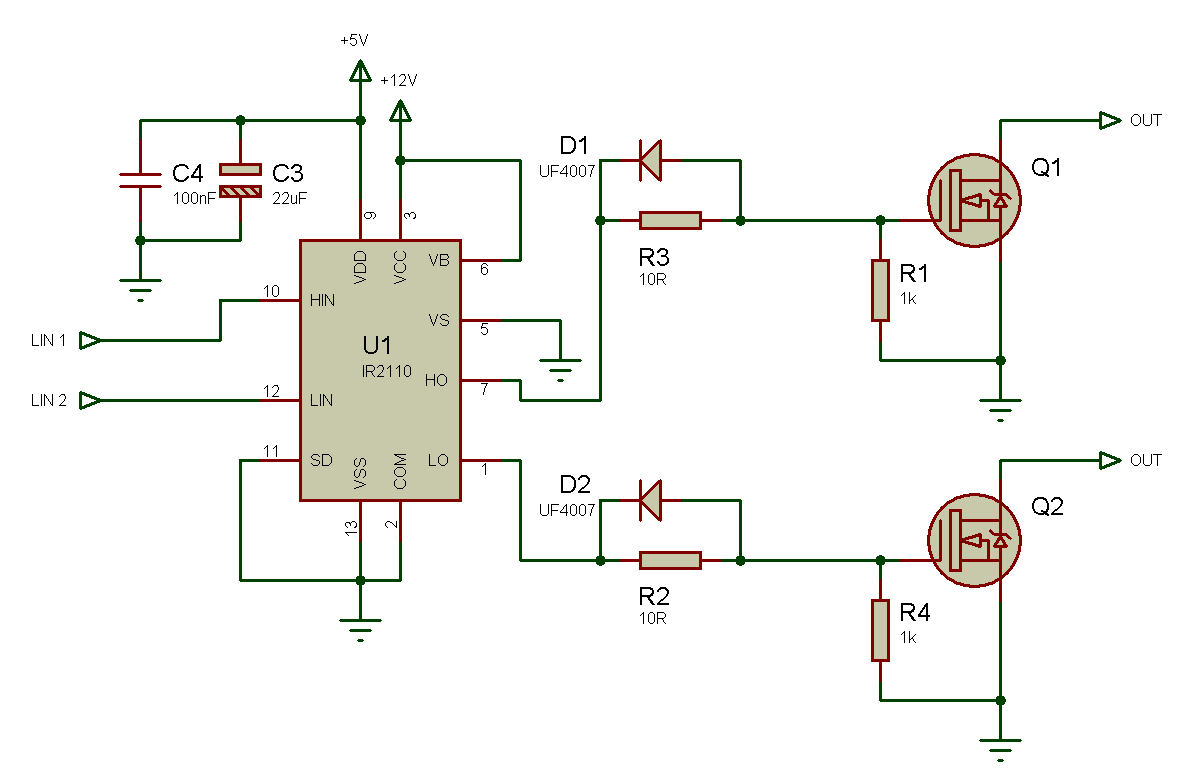
Рисунок 11 — Схема с IR2110 как двойного драйвера нижнего уровня
Если у вас проблемы с IR2110 и всё постоянно выходит из строя, горит или взрывается, то я уверен, что это из-за того, что вы не используете резисторы на затвор-исток, при условии, конечно, что вы всё спроектировали тщательно. НИКОГДА НЕ ЗАБЫВАЙТЕ О РЕЗИСТОРАХ НА ЗАТВОР-ИСТОК. Если вам интересно, вы можете прочитать о моем опыте с ними здесь (я также объясняю причину, по которой резисторы предотвращают повреждения): http://tahmidmc.blogspot.com/2012/10/magic-of-knowledge.html
Я видел как на многих форумах, люди бьются с проектированием схем на IR2110. У меня тоже было много трудностей прежде чем я cмог уверенно и последовательно строить успешные схемы драйвера на IR2110. Я попытался объяснить применение и использование IR2110 довольно тщательно, попутно всё объясняя и используя большое количество примеров, и я надеюсь, что это поможет вам в ваших начинаниях с IR2110.
Шаговые двигатели: особенности и практические схемы управления. Часть 2
Владимир Рентюк, Запорожье, Украина
Часть 2. Схемотехника систем управления
Выше были рассмотрены наиболее важные общие вопросы использования шаговых двигателей, которые помогут в их освоении. Но, как гласит наша любимая украинская поговорка: «Не повірю поки не провірю» («Не поверю, пока не проверю»). Поэтому перейдем к практической стороне вопроса. Как уже отмечалось, шаговые двигатели – это удовольствие не из дешевых. Но они имеются в старых принтерах, считывателях гибких и лазерных дисков, например, SPM-20 (шаговый двигатель для позиционирования головки в дисководах 5″25 Mitsumi) или EM-483 (от принтера Epson Stylus C86), которые можно найти у себя в старом хламе или купить за копейки на радиобазаре. Примеры таких двигателей представлены на Рисунке 8.
| |||||
| Рисунок 8. | Шаговые двигатели, используемые в устаревшей компьютерной технике. а) Шаговый двигатель SPM-20 для позиционирования головки в дисководах 5″25 Mitsumi. (Фото с сайта). б) Шаговый двигатель EM-483 от принтера Epson Stylus C86. (Фото с сайта). | ||||


Наиболее простыми для начального освоения являются униполярные двигатели. Причина кроется в простоте и дешевизне их драйвера управления обмотками. На Рисунке 9 приведена практическая схема драйвера, использованного автором статьи для униполярного шагового двигателя серии P542-M48 [6].
 | |
| Рисунок 9. | Драйвер униполярного шагового двигателя. (Дополнительная информация по подключению на Рисунках 10 и 12). |
Естественно, что выбор типа транзистора для ключей управления обмотками должен происходить с учетом максимального тока коммутации, а его подключение учитывать необходимость заряда/разряда емкости затвора. В ряде случаев прямое соединение MOSFET с ИМС коммутатора может быть недопустимым. Как правило, в затворах устанавливаются последовательно включенные резисторы небольших номиналов. Но в ряде случае необходимо предусмотреть еще и соответствующий драйвер для управления ключами, который обеспечит заряд/разряд их входной емкости. В некоторых решениях предлагается в качестве ключей использовать биполярные транзисторы. Это подходит только для очень маломощных двигателей с небольшим током обмоток. Для рассматриваемого двигателя с рабочим током обмоток I = 230 мА ток управления по базе ключа должен составить, по крайней мере, 15 мА (хотя для нормальной работы ключа необходимо, чтобы ток базы равнялся 1/10 рабочего, то есть 23 мА). Но такой ток от микросхем серии 74HCхх забрать невозможно, поэтому потребуются дополнительные драйверы. Как хороший компромисс, можно использовать IGBT, сочетающие в себе достоинства полевых и биполярных транзисторов.
С точки зрения автора статьи, самым оптимальным для управления коммутацией обмоток двигателей небольшой мощности является использование подходящих по току и сопротивлению открытого канала RDC(ON) MOSFET, но с учетом рекомендаций, описанных выше. Мощность, рассеиваемая на ключах для выбранного в качестве примера двигателя серии P542-M48, при полной остановке ротора не превысит
PVT = RDC(ON) × I 2 = 0.25 × (0.230) 2 = 13.2 мВт.
Транзисторы IRLML2803 с RDC(ON) = 0.25 Ом имеют допустимую мощность рассеяния 540 мВ и постоянный ток стока 0.93 А при температуре 70 °С. Так что, они полностью соответствуют требованиям и обеспечат надежную работу драйвера. В большинстве случаев, учитывая низкие частоты коммутации, проведенной выше оценки вполне достаточно. Поскольку детальное рассмотрение особенностей работы ключей не входит в рамки данной статьи, то для их выбора и полного расчета можно воспользоваться методикой, приведенной, например, в [7].
Еще одним важным моментов является правильный выбор так называемых снаберных диодов, шунтирующих обмотку двигателя (VD1…VD4 на Рисунке 9). Назначение этих диодов – гасить ЭДС самоиндукции, возникающую при выключении управляющих ключей. Если диоды выбраны неверно, то неизбежен выход из строя транзисторных ключей и устройства в целом. Обратите внимание, что в мощные MOSFET такие диоды, как правило, уже встроены.
Режим управления двигателем задается коммутатором. Как уже было отмечено выше, наиболее удобным и эффективным является управление с перекрытием фаз (Рисунок 4б). Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора, который использовал автор статьи как в ряде отладочных модулей (в том числе, и с приведенным выше драйвером), так и для практических применений, приведена на Рисунке 10.
 | |
| Рисунок 10. | Схема универсального коммутатора шагового двигателя (с реверсом). |
Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны). Временная диаграмма работы коммутатора приведена на Рисунке 11.
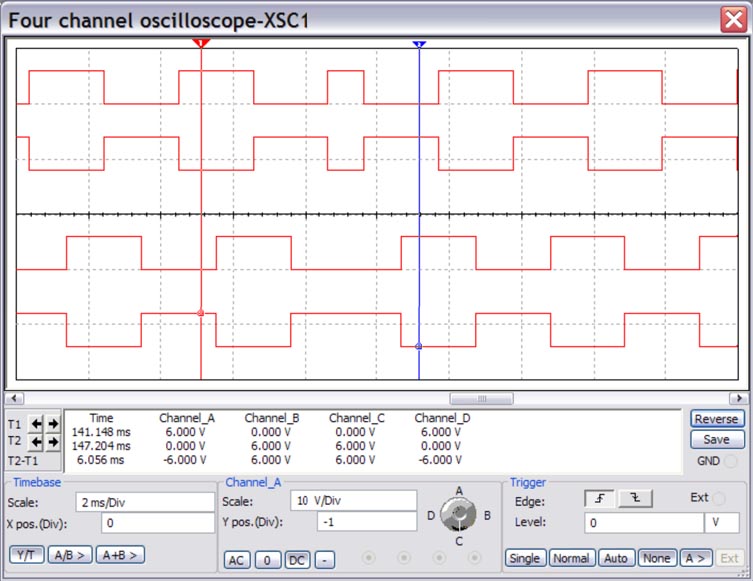 | |
| Рисунок 11. | Временная диаграмма универсального коммутатора с реверсом. Верхние две осциллограммы – Q1 D2-2, Q2 D2-2; нижние две – Q1 D2-1, Q2 D2-1. Маркеры показывают область изменения очередности включения фаз. |
Хочу обратить внимание читателей: в Интернете вы могли встретить похожую схему, выполненную не на D-триггерах, а на JK-триггерах. Будьте внимательны! В ряде этих схем допущена ошибка в подключении ИМС. Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной, а диаграмма управления будет аналогичной той, которая приведена на Рисунке 11 (осциллограммы до переключения очередности фаз).
 | |
| Рисунок 12. | Упрощенная схема коммутатора шагового двигателя (без реверса). |
Поскольку особых требований к сигналу «ШАГИ» не предъявляется, для его формирования может использоваться любой подходящий по уровням выходного сигнала генератор. Для своих отладочных модулей автор использовал генератор на базе ИМС таймера 555 (Рисунок 13).
 | |
| Рисунок 13. | Регулируемый генератор импульсов для коммутатора шагового двигателя. |
Для питания собственно двигателя можно использовать схему, приведенную на Рисунке 14, а схему коммутатора и генератора питать или от отдельного источника питания +5 В или через дополнительный маломощный стабилизатор. Земли силовой и сигнальной частей в любом случае необходимо разделить.
 | |
| Рисунок 14. | Схема питания шагового двигателя с режимами удержания и выключения. |
Схема на Рисунке 14 обеспечивает подачу двух стабильных по уровню напряжений для питания обмоток двигателя: 12 В в рабочем режиме и 6 В в режиме удержания. (Формулы, необходимые для расчета выходного напряжения, приведены в [8]). Рабочий режим включается подачей высокого логического уровня на контакт «ТОРМОЗ» разъема Х1. Допустимость снижения напряжения питания определяется тем, что, как уже отмечалось в первой части статьи, момент удержания шаговых двигателей превышает момент вращения. Так, для рассматриваемого двигателя P542-M48 момент удержания с редуктором 25:6 равен 19.8 Н·см, а момент вращения всего 6 Н·см. Этот подход позволяет при остановке двигателя уменьшить потребление мощности с 5.52 Вт до 1.38 Вт! Полное отключение двигателя осуществляется подачей высокого логического уровня на контакт «ВКЛ/ВЫКЛ» разъема Х1.
Если схема управления имеет выход на транзисторах с открытым коллектором, то в ключах VT1, VT2 необходимости нет, и выходы можно подключить непосредственно вместо упомянутых ключей.
Примечание: В этом варианте использование резисторов подтяжки недопустимо!
В качестве дросселя автор использовал катушку SDR1006-331K (Bourns). Общее питание формирователя напряжения для обмоток двигателя можно уменьшить до 16 – 18 В, что не скажется на его работе. Еще раз обращаю внимание: при самостоятельном расчете не забудьте учитывать, что формирователь обеспечивает режим с перекрытием фаз, то есть необходимо закладываться на номинальный ток схемы питания, равный удвоенному максимальному току обмоток при выбранном напряжении питания.
Задача управления биполярными двигателями более сложна. Основная проблема в драйвере. Для этих двигателей требуется драйвер мостового типа, и делать его, тем более в современных условиях, на дискретных элементах – неблагодарная задача. Да, этого и не требуется, так как имеется очень большой выбор специализированных ИМС. Все эти ИМС условно можно свести к двум типам. Первый – весьма популярная у любителей робототехники ИМС L293D STMicroelectronics [9] или ее варианты от Texas Instruments. Они относительно недороги и подходят для управления маломощными двигателями с током обмоток до 600 мА. ИМС имеют защиту от перегрева; устанавливать ее необходимо с обеспечением теплоотвода, которым служит фольга печатной платы [9]. Второй тип – это уже знакомая читателям по публикации в [1] ИМС LMD18245 [2].
Автор использовал драйвер L293DD в схеме для управления биполярным двигателем малой мощности типа 20M020D2B 12 В/0.1 А во время изучения проблемы использования шаговых двигателей. Этот драйвер удобен тем, что содержит четыре полумостовых ключа, поэтому для управления биполярным шаговым двигателем требуется всего одна ИМС. Полная схема, приведенная в [10] и многократно повторенная на интернет-сайтах, пригодна для использования в качестве тестовой платы. На Рисунке 15 показано включение ИМС драйвера (с привязкой к коммутатору из Рисунка 10), поскольку именно эта часть сейчас представляет для нас интерес, а Figure 6 (Bipolar Stepping-Motor Control) из спецификации [9] не совсем понятна начинающему пользователю. Она вводит в заблуждение, например, тем, что показаны внешние диоды, которые на самом деле встроены в ИМС и прекрасно справляются с обмотками маломощных двигателей. Естественно, что драйвер L293D может работать с любым коммутатором. Выключается драйвер логическим нулем по входу R.
Примечание: ИМС L293, в зависимости от изготовителя и суффиксов, указывающих на тип корпуса, имеют различия в нумерации и количестве выводов!
 | |
| Рисунок 15. | Схема подключения драйвера L293DD. |
Для более мощных двигателей автор статьи использовал драйверы LMD18245. Полная схема тестового модуля приведена на Рисунке 16.
 | |
| Рисунок 16. | Схема управления биполярным шаговым двигателем с использованием драйвера LMD18245. |
В отличие от L293DD, LMD18245 является не четырех-, а двухканальным драйвером, поэтому для реализации схемы управления требуются две ИМС. Драйвер LMD18245 выполнен по DMOS технологии, содержит схемы защиты от перегрева, короткого замыкания и выполнен в удобном 15-выводном корпусе ТО-220, что позволяет легко отводить от его корпуса излишнее тепло. В качестве задающего генератора использовалась схема, приведенная ранее на Рисунке 13, но с увеличенным до 4.7 кОм сопротивлением резистора R2. Для подачи одиночных импульсов используется кнопка BH1, позволяющая сдвинуть ротор двигателя на один шаг. Направление вращения ротора определяется положением переключателя S1. Включение и выключение двигателя осуществляется выключателем S2. В положение «ВЫКЛ» ротор двигателя освобождается, и его вращение импульсами управления становится невозможным. Режим удержания уменьшает максимальный ток, потребляемый обмотками двигателя, с двух до одного ампера. Если импульсы управления не подаются, то ротор двигателя остается в зафиксированном положении с пониженной вдвое мощностью потребления. Если же импульсы подаются, то вращение двигателя в этом режиме осуществляется с пониженным на малых скоростях вращения моментом. Необходимо заметить, что поскольку при полношаговом управлении «two-phase-on» включены обе обмотки, ток двигателя удваивается, а схема драйвера должна рассчитываться исходя из требований обеспечения заданного тока двух обмоток (резисторы R3, R8).
Схема содержит описанный ранее двунаправленный двухфазовый формирователь на D-триггерах (Рисунок 10). Максимальный ток драйвера задается резистором, включенным в цепь контакта 13 ИМС LMD18245 (резисторы R3, R8), и двоичным кодом на контактах цепи управления тока (выводы 8, 7, 6, 4). Формула для расчета максимального тока приведена в спецификации на драйвер [2]. Ограничение тока осуществляется импульсным методом. При достижении максимально заданной величины тока выполняется его «нарезка» («chopping»). Параметры этой «нарезки» задаются параллельной RC цепочкой, подключенной к выводу 3 драйвера. Достоинством ИМС LMD18245 является то, что токозадающий резистор, не включенный непосредственно в цепь двигателя, имеет достаточно большой номинал и маленькую рассеиваемую мощность. Для рассматриваемой схемы максимальный ток в амперах, согласно приведенной в [2] формуле, составляет:
VDAC REF – опорное напряжение ЦАП (в рассматриваемой схеме 5 В);
D – задействованные разряды ЦАП (в этом режиме используются все 16 разрядов);
RS – сопротивление токоограничивающего резистора (R3 = R8 = 10 кОм).
Соответственно, в режиме удержания (поскольку используются 8 разрядов ЦАП), максимальный ток составит 1 А.
В заключение необходимо отметить, что драйвер LMD18245 позволяет реализовать и микрошаговое управление. Как упоминалось выше, такой режим уменьшает, и даже подавляет паразитный резонанс ротора. Поддержка такого режима для указанного драйвера осуществляется микропроцессором, управляющим входами ЦАП.
Как можно видеть из предложенной статьи, шаговые двигатели хоть и сложнее в управлении, чем коллекторные, но не настолько, чтобы отказываться от них. Как говорили еще древние римляне: «Дорогу осилит идущий». Естественно, что на практике для многих приложений управление шаговыми двигателями целесообразно делать на основе микроконтроллеров, которые легко сформируют нужные команды для драйверов и выполнят роль коммутаторов. Дополнительную информацию и более детальное рассмотрение проблем, связанных с применением шаговых двигателей, кроме как по упомянутым выше ссылкам [3, 4, 7], можно почерпнуть из ставшей уже классикой монографии Кенио Такаши [11] и на специализированных интернет-сайтах, например, [12].
Есть еще один момент, на который автор статьи хотел бы обратить внимание читателей. Шаговые двигатели, как впрочем, и все двигатели постоянного тока, обратимы. Что имеется ввиду? Если приложить внешнее вращающее усилие к ротору, то с обмоток статора можно снять ЭДС, то есть двигатель становится генератором, причем весьма и весьма эффективным. Автор статьи экспериментировал с этим вариантом использования шаговых двигателей во время работы консультантом по силовой электронике в компании, занимающейся ветроэнергетикой. Необходимо было на простых макетах отработать ряд практических решений. По наблюдению автора статьи, эффективность шагового двигателя в таком применении была выше, чем у аналогичного по параметрам и габаритам коллекторного двигателя постоянного тока. Но это уже другая история.