Прл 4 путевая машина руководство по ремонту
5. Полное сопротивление движению поезда, Н,

6. Касательная сила тяги автодрезины, Н,

7. Сила тяги по сцеплению, Н,


Для движения автодрезины необходимо соблюдение неравенств Ри > W и FK > Рк. В данном случае 3113 > 2778 Н и 25 500 Н > 3113 Н. Неравенства соблюдаются, следовательно, при заданных условиях автодрезина обеспечит движение платформы с установленной скоростью.
10.4. ПУТЕРЕМОНТНАЯ ЛЕТУЧКА ПРЛ-3
Путеремонтная летучка ПРЛ-3 предназначена для механизации погрузки, разгрузки н транспортировки элементов верхнего строения пути в пределах дистанции пути. В качестве локомотива используют дрезину ДГКу. ПРЛ-3 (рис. 10.17) состоит из трех двухосных тормозных платформ 12. Крайние платформы имеют консольные поворотные краны 6 с подвижной 5, неподвижной 4 крановыми опорами, откидными щитами 7, неподвижными подрельсовыми опорами 8, упорными тумбами 9, кабиной 10, противовесами //, металлическими бортами 13, домкратами 14, выключающими из работы рессоры при загрузке летучки грузами.
Средняя платформа оборудована подвижной подрельсовой опорой /, металлическими бортами 2, съемными щитами 3. Все платформы снабжены откидными переходными фартуками 15. Для питания током электродвигателей приводов механизмов кранов от генератора ДКГу вдоль платформ в трубах проложены кабели силовые н цепей управления. Краны расположены на крайних платформах на расстоянии 1,5 м от осей автосцепок. Расстояние между осями поворота обоих кранов составляет 13,4 м, что позволяет выполнять погрузоч-но-разгрузочные операции с 25-метровымн рельсами без специальной траверсы. На раме стрелы крана смонтированы электрифицированные механизмы подъема груза, передвижения грузовой тележкн и поворота крана.
Модернизация путеремонтной летучки ПРЛ-4

Белорусский государственный университет транспорта
Кафедра «Детали машин, путевые и строительные машины»
Курсовой проект по дисциплине «Путевые машины и механизмы»
на тему «Модернизация путеремонтной летучки ПРЛ-4»
Гомель 2017
Для ускорения темпов и повышения качества работ по содержанию и ремонту пути применяются разнообразные путевые машины и механизмы, повышающие производительность и облегчающие условия труда работающих
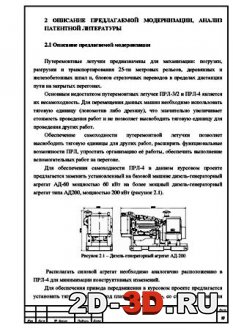
Для механизации погрузки, разгрузки и транспортирования 25-ти метровых рельсов, деревянных и железобетонных шпал и, блоков стрелочных переводов в пределах дистанции пути на закрытых перегонах. Широкое распространение получили путеремонтные летучки ПРЛ-3/2, ПРЛ-4.
В данном курсовом проекте рассматривается путеремонтная летучка ПРЛ-4. Цель курсового проекта – провести модернизацию ПРЛ-4 путем обеспечения самоходности ее передвижения на месте проведения работ.
Содержание работы:
Введение
Назначение, краткое описание устройства и работы машины
Анализ патентной литературы
Описание предлагаемой модернизации
Тяговый расчет машины
Расчет на устойчивость
Расчет привода передвижения машины
Расчет механизма подъема груза крана
Расчет привода механизма передвижения тележки крана
Расчет механизма поворота крана
Техника безопасности, пожарная безопасность и ресурсосбережение при работе и обслуживании машины
Метрология и стандартизация при проектировании машин
Список использованных источников
Состав: Путеремонтная летучка ПРЛ-4 (ВО), привод тележки (СБ), Механизм подъема груза (СБ), спецификации, ПЗ 
Путеремонтная летучка ПРЛ-4
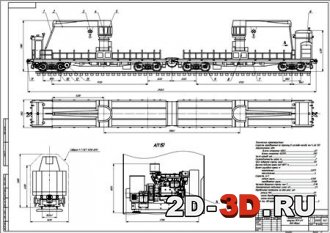
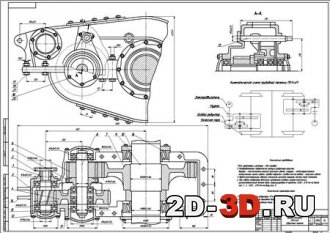
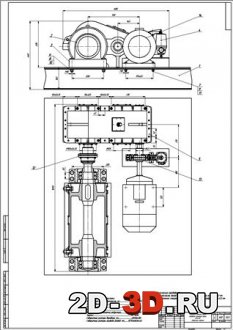
В составе чертежи: общего вида, механизма подъема груза, редуктора приводной тележки.
Для ускорения темпов и повышения качества работ по содержанию и ремонту пути применяются разнообразные путевые машины и механизмы, повышающие производительность и облегчающие условия труда работающих
Для механизации погрузки, разгрузки и транспортирования 25-ти метровых рельсов, деревянных и железобетонных шпал и, блоков стрелочных переводов в пределах дистанции пути на закрытых перегонах. Широкое распространение получили путеремонтные летучки ПРЛ-3/2, ПРЛ-4. В данном курсовом проекте рассматривается путеремонтная летучка ПРЛ-4. Цель курсового проекта – провести модернизацию ПРЛ-4 путем обеспечения самоходности ее передвижения на месте проведения работ.
1 Назначение, краткое описание устройства, работы машины
2 ОПИСАНИЕ ПРЕДЛАГАЕМОЙ МОДЕРНИЗАЦИИ, Анализ патентной литературы.
2.1 Описание предлагаемой модернизации.
2.2 Патентный анализ существующих конструкций приводных тележек самоходного подвижного состава.
3 ТЯГОВЫЙ РАСЧЕТ МАШИНЫ.
4 РАСЧЕТ УСТОЙЧИВОСТИ МАШИНЫ.
4.1 Расчет устойчивости машины против опрокидывания.
4.2 Расчет устойчивости машины против схода с рельсов.
5 РАСЧЕТ ПРИВОДА МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ МАШИНЫ.
6 РАСЧЕТ СВОБОДНОСТОЯЩЕГО ПОВОРОТНОЙ КРАНА С ТЕЛЕЖКОЙ.
6.1 Краткая характеристика крана.
6.2 Расчет механизма подъема груза.
6.3 Расчет механизма передвижения тележки.
6.4 Расчет механизма поворота.
7 ТЕХНИКА БЕЗОПАСНОСТИ, ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ ПРИ РАБОТЕ МАШИНЫ.
7.1 Техника безопасности при проведении работ.
7.2 Охрана окружающей среды при работе машины.
8 РЕСУРСОСБЕРЕЖЕНИЕ ПРИ ПРОЕКТИРОВАНИИ, ЭКСПЛУАТАЦИИ И РЕМОНТЕ ПУТЕРЕМОНТНЫХ ЛЕТУЧЕК.
9 МЕТРОЛОГИЯ И СТАНДАРТИЗАЦИЯ ПРИ ПРОЕКТИРОВАНИИ МАШИН.
Прл 4 путевая машина руководство по ремонту
ТЕХНИЧЕСКАЯ ИНФОРМАЦИЯ
«Регионального Центра Инновационных Технологий»
ПУТЕВЫЕ МАШИНЫ
применяемые в оао «ржд»
Конструкция, теория и расчет
Глава 11 — 14.
11. МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДИАГНОСТИКИ ПУТИ
11.1. Контрольно-измерительные машины и механизмы. Их классификация
11.2. Путеизмерительные шаблоны и тележки
11.3. Путеизмерительные автомотрисы
11.4. Вагоны-путеизмерители КВЛ-П
11.5. Скоростная путеобследовательская станция ЦНИИ-4МД
11.6. Комплексные методы качественной и количественной оценки состояния пути
11.7. Оборудование для дефектоскопии рельсов
11.7.1. Методы дефектоскопии
11.7.2. Съемные и переносные дефектоскопы
11.7.3. Мобильные средства дефектоскопии
11.8. Средства диагностики земляного полотна
11.9. Автоматизированная система диагностики пути
11.9.1. Единая технология паспортизации геометрии рельсовой колеи и управления машинной выправкой пути по данным вагонов-утеизмерителей
11.9.2. Система сбора, обработки и хранения информации о местонахождении удаленных подвижных объектов путевого хозяйства
11.9.3. Разработка автоматизированной система диагностики пути
12. МАШИНЫ ДЛЯ ОЧИСТКИ ПУТИ ОТ СНЕГА
12.1. Плужные снегоочистители (классификация, устройство, принцип действия)
12.2. Основы расчета плужных снегоочистителей
12.2.1. Расчет ширины зоны отброса снега при работе снегоочистителя
12.2.2. Тяговый расчет плужного снегоочистителя
12.3. Роторные снегоочистители (классификация, устройство, принцип действия)
12.4. Основы расчета роторных снегоочистителей
12.4.1. Расчет критической угловой скорости вращения фрезы
12.4.2. Расчет мощности привода фрез
12.4.3. Расчет основных параметров выбросного ротора
13. ТЯГОВЫЕ, ПОГРУЗОЧНО-ТРАНСПОРТНЫЕ И СПЕЦИАЛИЗИРОВАННЫЕ МАШИНЫ ДЛЯ ПУТЕВЫХ РАБОТ
13.1. Тягово-энергетические модули для путевых машин
13.2. Погрузочно-транспортные машины
13.2.1. Мотовозы погрузочно-транспортные
13.2.2. Путеремонтные летучки
13.2.3. Дрезины пассажирские
13.3. Машины и комплексы для электрификации железных дорог
13.3.1. Машины для разработки котлованов и установки опор контактной сети
13.3.2. Машины для монтажа контактной сети, её обслуживания и ремонта
13.4. Определение основных параметров дрезин и мотовозов
13.4.1. К определению основных конструктивных параметров дрезин и мотовозов
13.4.2. Определение тяговых характеристик и режимов движения
13.5. Поезда специального назначения: восстановительные, пожарные, для подавления растительности
14. МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ ДЛЯ ПУТЕВЫХ РАБОТ
14.1. Гидравлический путевой инструмент
14.1.1. Домкраты
14.1.2. Рихтовщики
14.1.3. Разгонщики
14.1.4. Сдвигатели рельсовых путей
14.1.5. Прочие устройства
14.2. Электрический путевой инструмент
14.2.1. Рельсорезные станки
14.2.2. Рельсосверлильные станки
14.2.3. Фаскосъёмные станки
14.2.4. Рельсошлифовальные станки
14.2.5. Шурупогаечные ключи
14.2.6. Электрический путевой инструмент для работы с балластом
14.2.7. Электрический путевой инструмент для работы со шпалами
14.2.8. Рельсоподъёмники
14. 3. Энергетическое оборудование для путевых работ
14.3.1. Источники энергоснабжения гидравлического путевого инструмента
14.3.2. Источники энергоснабжения электрического путевого инструмента
ГЛАВА 11
МАШИНЫ И ОБОРУДОВАНИЕ ДЛЯ ДИАГНОСТИКИ ПУТИ
Железнодорожный путь характеризуется конструктивно связанными между собой инженерными объектами, образующих дорогу с рельсовой колеей, верхним строением, земляным полотном и искусственными сооружениями.
Рельсовая колея является объектом, непосредственно взаимодействующим с подвижным составом. От ее технического состояния напрямую зависит безопасность движения поездов с установленными скоростями и затраты на текущее содержание и ремонтно-путевые работы. Неисправности рельсовой колеи могут быть вызваны не только отказами элементов ее конструкции, но и неисправностями верхнего строения пути, земляного полотна и искусственных сооружений.
На железных дорогах действует многоуровневая система контроля (мониторинга) железнодорожного пути, включающая в себя мероприятия:
— комиссионные осмотры объектов железнодорожного пути, организуемые руководителями различного уровня;
— периодические натурные измерения объектов железнодорожного пути с использованием ручных средств измерения (путевых шаблонов, ручных тележек, линеек, рулеток и др.);
— периодические диагностические исследования объектов пути под реальной нагрузкой с использованием вагонов-лабораторий (путеизмерительных, дефектоскопных).
Виды и периодичность контроля железнодорожного пути регламентируются существующей нормативно-технической документацией.
11.1. Контрольно-измерительные машины и механизмы.
Их классификация
С появлением железных дорог в России вопросы безопасности движения поездов имеют первостепенное значение. Еще в 1897 г. на 15 съезде инженеров службы пути слушался доклад инженера И.Н. Ливчака об изобретенном им приборе для обнаружения вертикальных толчков, наличие которых на пути отмечалось выбросом краски на движущуюся бумажную ленту – прототип современных носителей информации. В 1911 г. инженером И.Е. Долговым была получена привилегия (патент) на его знаменитую путеизмерительную тележку, которая записывала показания трех датчиков: ширины колеи, возвышения одного рельса над другим и продольного уклона пути. С 1913 г. начали строить путеизмерительный вагон по проекту И.Е. Долгова. Уже в 1915 г. было охвачено проверкой этим вагоном около 820 км пути. В 1916 г. на Екатеринбургской дороге был установлен официальный инспекторский надзор за состоянием рельсовой колеи с помощью путеизмерительного вагона. Им было проверено уже 4800 км пути при средней скорости движения 25 км/ч. С 1923 г. началась массовая постройка путеизмерителей системы И.Е. Долгова. В 1927 г. проведена его модернизация, после чего скорость измерительных проездов была повышена до 30 – 35 км/ч.
С 1958 г. выпускались путеизмерители ЦНИИ МПС, а с 1979 г. – наиболее распространенные на железных дорогах СССР путеизмерители ЦНИИ-2, которые регистрировали на две бумажные ленты (основную и дубликат) состояние рельсовой колеи с пределами измерения: по ширине колеи 1514–1560 мм, по взаимному положению рельсовых нитей по высоте (уровень) ± 150 мм, по положению рельсовых нитей в плане (рихтовка) ± 225 мм, по просадкам рельсовых нитей на базе 2,7 м в пределах ± 50 мм.
К настоящему времени путеизмерители ЦНИИ-2 модернизированы. В эксплуатации находятся путеизмерительные вагоны и вагоны-лаборатории комплексной диагностики пути: КВЛ-П1, КВЛ-П1М, КВЛ-П1МП, КВЛ-П2.1, КВЛ-П3, ЦНИИ-4, путеобследовательская станция (ПС) ЦНИИ-4МД [2, 46, 57]. С помощью этих вагонов производится периодическая системная диагностика состояния пути. Вагоны оснащаются современными компьютерными системами записи и расшифровки информации с использованием систем спутниковой навигации. Это позволяет обследовать и оценить состояние пути на целых направлениях с непрерывной записью на протяжении нескольких тысяч километров по основным геометрическим параметрам рельсовой колеи (взаимное положение рельсовых нитей по высоте; ширине колеи; горизонтальные и вертикальные стрелы изгиба) и дополнительным динамическим параметрам. Основные геометрические параметры рельсовой колеи в путевом хозяйстве железных дорог РФ имеют следующее определение.
Рис. 11.1. а – схема измерения взаимного положения рельсовых нитей по высоте (уровень);
б – схема измерения ширины колеи;
в – каноническая схема измерения стрел изгиба рельсовых нитей путеизмерительными выгонами в РФ
Под взаимным положением рельсовых нитей по высоте (уровень) понимается взаимное положение по высоте средних точек головок рельсов, измеренное по нормали к рихтовочной нити и приведенное к базе 1600 мм (рис. 11.1, а).
Ширина колеи (шаблон) – есть расстояние между внутренними гранями головок рельсов, измеренное на расстоянии 13+3 мм от линии, проходящей через середины головок рельсов и проведенной по нормали к рихтовочной нити (рис. 11.1, б).
Горизонтальная стрела изгиба характеризует положение рельсовых нитей в плане (рихтовка), а вертикальная стрела изгиба – в вертикальной плоскости, ориентированной вдоль пути (просадка). Измерения горизонтальных и вертикальных стрел изгиба различными путеизмерительными средствами на базе подвижных единиц производятся от асимметричной хорды с коэффициентом асимметрии в диапазоне от 0,15 до 0,42 (отношение короткой базы к длинной) и приводятся к каноническим схемам измерения: для горизонтальных стрел изгиба – к измерениям от хорды длиной 21.5 м на расстоянии 4.1 м от одного из её концов (рис. 11.1, в), а для вертикальных стрел изгиба – к измерениям от хорды длиной 17 м на расстоянии 2.4 м от одного из её концов. При этом горизонтальная стрела изгиба определяется по внутренней грани рельса на глубине 13+3 мм (аналогично шаблону, см. рис. 11.1, б), а вертикальная стрела изгиба – по средней линии поверхности катания рельса.
На настоящее время в НПЦ ИНФОТРАНС разработаны методы представления геометрических параметров рельсовой колеи, получаемых в канонической форме, в виде натурных неровностей в диапазоне длин волн нормируемой длины. Указанное представление геометрических параметров рельсовой колеи существенно упрощает технологию ремонтных работ.
Реализация методов получения геометрических параметров рельсовой колеи путеизмерительными средствами на базе подвижных единиц осуществляется двумя способами:
– контактным – с помощью специальных механизмов в составе путеизмерительных средств контактирующих с рельсовыми нитями;
– бесконтактным оптическим (ЦНИИ-4), а также ультра-звуковым и др. В условиях работы железных дорог РФ (прежде всего климатических) в настоящее время наиболее приемлемым является контактный способ получения геометрических параметров рельсовой колеи; бесконтактный оптический метод – технически и экономически целесообразен для скоростных магистралей в климатических условиях коротких малоснежных зим.
Помимо развития путеизмерительных вагонов, создаются путеизмерительные дрезины. Они предназначены для оперативного контроля состояния пути в пределах отдельных дистанций.
Разработкой систем автоматизированного контроля геометрического положения рельсовых нитей, их программного обеспечения занимается Научно-производственный центр информационных и транспортных систем (НПЦ ИНФОТРАНС), расположенный в г. Самаре, соответствующие лаборатории ВНИИЖТ.
Кроме путеизмерительных вагонов и дрезин, в путевом хозяйстве используются путеизмерительные шаблоны, например, ЦУП-2Д, ЦУП-3Д, АШП-2, путеизмерительные тележки. Тележки ПТ-7, ПТ-7МК и ПТ-8 имеют электронную систему измерений параметров с записью на бумажную ленту самописцем (ПТ-7) и с индикацией параметров на электронных табло (ПТ-7МК.1, ПТ-8).
Для обнаружения скрытых дефектов рельсов применяют:
— переносные однониточные дефектоскопы РДМ-1;
— портативные дефектоскопы РДМ-33, РДМ-3, Авикон-02Р для выборочного контроля и контроля сварных стыков;
— передвижные съемные тележки дефектоскопы Авикон-01;
— РДМ-2, АВИКОН-11, РДМ-22 дефектоскопные автомотрисы и совмещенные вагоны-дефектоскопы.
Дефектоскопные средства в основном оборудуются измерительной аппаратурой, разработанной Институтом мостов при ПГУПС.
Сейчас на железных дорогах России созданы центры диагностики, в которых собирается и обрабатывается информация вагонов-путеизмерителей и вагонов-дефектоскопов. В этих центрах сформированы и постоянно обновляются базы данных, что позволяет обеспечивать глобальный мониторинг состояния пути на железной дороге. Такая база данных сформирована и для ОАО «РЖД» в целом.
Через глобальную компьютерную сеть ОАО «РЖД» возможно формирование запросов на получение соответствующей информации. Линейные подразделения и управления дорог формируют, в свою очередь, электронные отчеты о состоянии дел в путевом хозяйстве.
В путевом хозяйстве используются также системы обследования и диагностики земляного полотна, оснащенные геологической аппаратурой (георадарами).
11.2. Путеизмерительные шаблоны и тележки
Для текущего контроля за размерами рельсовой колеи используются путеизмерительные шаблоны и тележки. Они измеряют ширину колеи (шаблон) и возвышение одного рельса над другим (уровень) без нагрузки.
Рис. 11.2. Путевые шаблоны ЦУП-2 (а), ЦУП-3 (б) и 08813 ЗАО завод «Измерон» (в);
1 и 9 – неподвижный и подвижный наконечники; 2 – штанга; 3 – рукоятка; 4 – поводок тяги;
5 – лимб; 6 – уровень; 7 – тяга с пружиной; 8 – шкала механизма шаблона; 10 – эксцентрик; 11 – вилка
Путевые шаблоны (в дальнейшем шаблоны) предназначены для контроля железнодорожного пути: ширины колеи и возвышения одного рельса относительно другого. Кроме того, используются конструктивные исполнения шаблонов, позволяющих измерять геометрические параметры элементов стрелочного перевода. Шаблоны путевые изготавливаются в пяти исполнениях: 08809, 08809-01, 08809-02, 08809-03 и 08809-04 (рис. 11.2).
Шаблоны исполнения 08809 (а) предназначены для контроля ширины колеи, возвышения одного рельса относительно другого, ординат переводных кривых, ширины желобов, расстояния между рабочими гранями сердечника или усовика и контррельса, бокового износа головки рельса, рамного рельса и остряка (вне пределов боковой строжки) стрелочного перевода. Измерения производятся на уровне 16 мм ниже поверхности катания головки рельса.
Шаблоны исполнения 08809-01 (б) предназначены для контроля ширины колеи на уровне 16 мм ниже поверхности катания и возвышения одного рельса относительно другого.
Шаблоны исполнения 08809-02 (б) предназначены для контроля ширины колеи на уровне 13 мм ниже поверхности катания и возвышения одного рельса относительно другого.
Шаблоны исполнения 08809-03 (в) с заглублением измерительных наконечников на 13 мм ниже поверхности катания, исполнения 08809-04 (в) с заглублением измерительных наконечников на 16 мм ниже поверхности катания, предназначены для контроля ширины колеи, возвышения одного рельса относительно другого, ординат переводных кривых, ширины желобов, расстояния между рабочими гранями сердечника или усовика и контррельса, бокового износа головки рельса, рамного рельса и остряка (вне пределов боковой строжки) стрелочного перевода, понижения верха головки остряка стрелочного перевода относительно поверхности катания рамного рельса, укрытия и профиля боковой рабочей грани остряка стрелочного перевода.
Шаблоны исполнения 08809-03 и 08809-04 оснащены контрольной функцией «правильности показаний ширины колеи и расстояний между рабочими гранями сердечника или усовика и контррельса», не требующей стенда для проверки (функция самотестирования).
Рис. 11.3 Путевые шаблоны исполнений: а – 08809; б – 08809-01 и 08809-02; в – 08809-03 и 08809-04:
1 – шкалы «усовик» и «контррельс; 2 – шкала «ширина колеи»; 3 – уровень; 4 – лимб; 5 – поводок тяги; 6 – рукоятка;
7 – прижимной винт; 8 – шкала «0-100 мм»; 9 – каретка; 10 – неподвижный наконечник;
11 – исп. 08809: наконечник для измерения ординат переводных кривых, ширины желобов и бокового износа;
исп. 08809-02: наконечник для измерения ординат переводных кривых, понижения остряка относительно рамного рельса,
контроля правильности показаний ширины колеи;
12 – штанга; 13 – подвижный наконечник; 14 – наконечник для измерения ширины желобов и бокового износа;
15 – наконечник для проверки укрытия и профиля боковой рабочей грани остряка
В путевом хозяйстве нашли распространение шаблоны ЦУП-2, ЦУП-3 и 08813 ЗАО завод ««Измерон» (рис. 11.3). Шаблоны отличаются конструктивным исполнением механизмов и внешним дизайном. В частности, у шаблонов ЦУП-2 (а) и ЦУП-3 (б) лимб 5 сделан в виде винтового механизма, который соединен с уровнем 6. У шаблона 08813 (в) лимб 5 выполнен в виде поворотного колеса, установленного на одной оси с эксцентриком 10. С эксцентриком контактирует вилка 11, на которой установлен уровень. При измерениях шаблон устанавливается на рельсы, и снимаются по шкале показания ширины колеи и уровня. При измерениях превышения, вращая лимб, добиваются установки пузырька уровня в среднее положение, после чего снимают показания по шкале лимба 5.
Шаблоны используются при техническом обслуживании как находящихся в эксплуатации главных, приемоотправочных, стационарных и подъездных железнодорожных путях типов Р50, Р65, Р75 всех классов и стрелочных переводов, так и строящихся, а также могут использоваться в условиях метрополитена.
Принцип действия — механический. Диапазон измерений ширины колеи 1510 – 1550 мм с погрешностью ± 0,5 мм, а воз-вышения 0 – 160 мм с погрешностью ± 1 мм.
В путевом хозяйстве начинают также использоваться автоматизированные путеизмерительные шаблоны АШП-2 и АШП-3 системы НПО ИНФОТРАНС. Шаблоны оснащены автоматизированной системой измерений на основе микроЭВМ, что позволяет показывать результаты измерений на цифровых индикаторах, вести запись результатов и передавать их в бортовую автоматизированную систему компьютеризированного вагона-лаборатории (БАС КВЛ-П).
Рис. 11.4. Путеизмерительная тележка ПТ-7МК:
1 – рельсовые нити; 2 и 7 – подвижный и неподвижный колесные блоки;
3 – выдвижная штанга; 4 – балка с датчиками ширины колеи и превышения;
5 – блок автоматизированной системы управления; 6 – рукоятка
Путеизмерительная тележка ПТ-7МК (рис. 11.4) предназначена для выявления отступлений параметров геометрии рельсовой колеи по уровню и ширине, превышающих нормативные значения, установленные для соответствующего класса пути, на главных, станционных и подъездных путях.
Оборудование тележки монтируется на поперечной балке 4, внутри которой имеется подпружиненная выдвижная штанга 3, связанная с потенциометрическим датчиком ширины колеи. Внутри балки также размещается авиационный малогабаритный датчик уровня для измерения превышения. Тележка через двухколесные блоки опирается при движении на рельсы: блок 7 неподвижно соединен с балкой, а блок 2 – со штангой. Каждый ролик имеет две реборды для опоры на рельсы и отслеживания боковой грани головки рельса на расчетном уровне 13 мм. С одним из роликов связан импульсный датчик пути, который через 0,25 м пройденного пути вырабатывает электрический импульс, запускающий сканирование и запись показаний датчиков в оперативное запоминающее устройство (ОЗУ) электронного блока 5. По-казания также выводятся на экран. Объем энергонезависимой памяти блока позволяет хранить данные на 100 км пути.
Записанные данные могут выводиться во внешние вычислительные системы: персональные компьютеры или БАС КВЛ-П для анализа, записей путеизмерительных лент или отчетов. Масса тележки не более 16 кг.
Рис. 11.5. Тележка для индикации волнообразного износа рельсов (а) и схема измерений (б):
1 – штанга; 2 – рукоять; 3 – измерительный механизм; 4 – направляющие ролики;
5 – датчик пути; 6 – аккумулятор; 7 – датчик линейных перемещений
Тележка для индикации волнообразного износа рельсов двухнитевая ТИВИР — 03 (рис. 11.5) [57, 85] предназначена: для периодического текущего контроля и оценки состояния поверхности катания головки рельсов; для сбора информации, используемой при планировании работ по шлифованию рельсов; для контроля качества работы рельсошлифовальных поездов и рельсошлифовального оборудования. В состав тележки входит портативный контрольно-вычислительный комплекс, обеспечивающий запись измеряемых параметров, передачу данных на внешние вычислительные системы, в частности на бортовые комплексы рельсошлифовальных поездов.
Тележка представляет собой сборно-разборную конструкцию. Ее механическое оборудование включает два измерительных механизма 3, связанных соединительной штангой 1 и устанавливаемых на головки правого и левого рельсов с помощью вертикальных и горизонтальных направляющих роликов. Масса тележки в сборе 15 кг. Тележка перемещается по рельсам вручную с помощью рукоятки 2.
Каждый измерительный механизм имеет несущую плиту, являющуюся хордой, которая перемещается вдоль оси рельса, опираясь на два вертикально расположенных направляющих ролика. Один из направляющих роликов связан с сельсином-датчиком угловых перемещений 5. Он является датчиком пути – скорости. Положение измерительных механизмов относительно продольных осей симметрии головок рельсов при измерении фиксируется двумя горизонтально расположенными направляющими роликами.
Стрелы изгиба, отображающие короткие неровности по обеим рельсовым нитям, измеряются с помощью двух индуктивных датчиков линейных перемещений, выполненных на основе линейных дифференциальных трансформаторов. Эти датчики монтируются на штоках измерительных щупов, выполненных из износостойких материалов и находящихся в постоянном контакте с поверхностью катания головки рельсов.
В рабочем режиме тележка производит регистрацию следующих параметров: стрел изгиба каждой рельсовой нити в вертикальной плоскости от хорды 240 мм с измерением в точке, находящейся на расстоянии 80 мм от крайней задней точки (по направлению движения); пройденного пути с пикетными и километровыми отметками. В основу измерения стрел положена четырехточечная система.
Приняты следующие обозначения (см. рис. 11.5, б):
H – амплитуда неровности;
h – стрела изгиба, отображающая неровность;
l – длина неровности;
Z – измеряемый тележкой параметр.
Стрела изгиба h и измеряемый параметр Z находятся в соотношении h = 0.744Z.
Технические характеристики тележки: Амплитуда измеряемых коротких неровностей, мм, 0 – 25 Погрешность измерения, % 0,5 Дискретность путевой координаты, мм 6,0 Время работы в автономном режиме, час 7,0 Длина измеряемых неровностей, м 0,03 – 1,5
Под силовым воздействием колесных пар на рельсы происходит износ поверхностей катания их головок. Контроль правильности профиля головки рельса производится рельсовыми профилографами ПР-03. В стационарных условиях на рельсосварочных поездах (РСП) для этих целей используются автоматизированные измерители геометрии рельсов ИГРА-01, которые не только контролируют профиль поверхности катания, но и позволяют оценить прямолинейность и другие параметры геометрии рельса. Эти устройства являются высокотехнологичными, оснащенными современными компьютерными системами управления.
11.3. Путеизмерительные автомотрисы
По своей сути, автомотриса – это самоходный пассажирский вагон, поэтому ее база может использоваться для монтажа оборудования измерительных систем, аналогичных вагонам-путеизмерителям (см. п.п. 11.4 и 11.5). Внутреннее помещение автомотрисы используется для размещения аппаратно-программного комплекса и другого оборудования, а также для размещения мест отдыха экипажа и устройств жизнедеятельности в поездках.
В путевом хозяйстве используются автомотрисы с двухосной (МД-РУ) или тележечной четырехосной экипажной частью (МТКП, АПТ «Восток»). Для оценки геометрического состояния пути в продольном профиле и в плане под динамической нагрузкой обычно используются показатели, привязанные к стандартной ходовой базе пассажирского вагона. Ходовые базы автомотрис по своим размерам отличаются от вагонов, поэтому данные автомотрис должны подвергаться дополнительной математической обработке для единства измерений и возможности сравнения получаемых результатов. Все современные путеизмерительные системы оборудуются программно-аппаратными комплексами.
Рис. 11.6. Схема машины для технологического контроля пути (автомотрисы путеизмерителя и дефектоскопа):
1 – кузов с силовой установкой и передачей, кабинами управления, аппаратным и бытовым отсеками;
2, 5, 6 и 8 – измерительные тележки системы продольного профиля и рихтовки; 3 – дефектоскопные лыжи с искателями;
4 и 7 – ходовые тележки с неприводными и приводными колесными парами; 9 – отводные ролики измерительных тележек
Машина технологического контроля пути МТКП, оснащенная оборудованием группы компаний ТВЕМА (рис. 11.6), применяется в путевом хозяйстве железных дорог для проверки геометрических параметров рельсовой колеи и передачи информации на машины выправки и ремонта пути. Кроме того, на машине установлен дефектоскоп. Машина позволяет, на основе обработки результатов измерений уточнять параметры исследуемого участка пути.
Кузов автомотрисы с размещенными в нем устройствами и оборудованием опирается на приводную 7 и неприводную 4 ходовые тележки. На неприводной тележке размещаются дефектоскопные лыжи с блоками искателей. Аналогично вагону-путеизмерителю параметры геометрии пути определяются относительно кузова. Положение рельсовых нитей по уровню измеряется относительно двух гироскопических систем, что увеличивает точность измерений. Положение рельсовых нитей в плане и продольном профиле определяется системой, состоящей из измерительных тележек 2, 5, 6 и 8, соединенных с датчиками Д1 – Д6. Для повышения точности измерений они продублированы. Например, просадки рельсовых нитей определяются относительно хорды через стрелы изгиба в двух точках, измерения ширины колеи могут производиться параллельно на всех четырех тележках.
При измерениях тележки прижимаются горизонтально измерительными роликами к правой и левой рельсовым нитям, чтобы независимо отслеживать их положение в плане. Проезд крестовин стрелочных переводов возможен благодаря применению отводных роликов 9, взаимодействующих с контррельсами.
Подход к расчету основных параметров путеизмерительного оборудования аналогичен вагону-путеизмерителю.
Отклонение от нормы ширины колеи измеряется в диапазоне от –10 до +40 мм с погрешностью не более 1,5 мм. Взаимное положение обеих рельсовых нитей по высоте – от -155 до +155 мм. Стрела изгиба рельсовой нити в горизонтальной плоскости относительно прямой хорды длиной 12,5 м при замере в точке на расстоянии 4,1 м от конца хорды: от –85 до +85 мм. Максимальная скорость движения – 70 км/ч (рабочее положение).
11.4. Вагоны-путеизмерители КВЛ-П
До начала 90-х годов прошлого века вагон-путеизмеритель ЦНИИ-2 был единственным средством механизированного контроля рельсовой колеи железнодорожного пути под динамической нагрузкой при скорости движения до 70 км/ч. Вагон позволял производить запись параметров геометрии рельсовой колеи на две бумажные ленты в виде диаграмм. Принцип работы путеизмерителя заключался в передаче относительных смещений контактирующих с головками рельсов элементов через трособлочные передачи на пишущие узлы стола регистрации параметров. Механическая передача с массивными передаточными элементами существенно ограничивает скорость движения вагона при измерениях, усложняет эксплуатацию. Кроме того, такая система подразумевала ручную расшифровку результатов измерений по диаграммам с использованием специальных шаблонов, поэтому в оценке состояния пути присутствовал субъективный человеческий фактор. С развитием компьютерной техники и современных средств измерений появилась возможность существенно упростить механическую часть измерительной системы, сделать ее в меньшей степени инерционной, ввести автоматическую расшифровку первичных данных измерений, сведя к минимуму субъективные ошибки. Информация о состоянии пути может накапливаться в базе данных и использоваться для назначения режимов движения поездов, планирования путевых работ и в целом использоваться в системе мониторинга состояния пути на разных уровнях управления (дистанция пути, железная дорога, департамент пути и сооружений ОАО «РЖД»).
В 1993 г. Научно-производственный центр информационных и транспортных систем (НПЦ ИНФОТРАНС г. Самара, под руководством С.В.Архангельского) разработал компьютеризированный вагон-лабораторию для измерения геометрии рельсовых нитей КВЛ-П1 [2, 46, 57]. В основу конструкции измерительной системы была положена традиционная схема измерений вагона-путеизмерителя ЦНИИ-2, однако смещения элементов измерительных устройств передаются на валы сельсинов-датчиков. В результате системой первичного измерения вырабатываются электрические сигналы, которые кодируются и поступают на цифровую обработку в бортовую автоматизированную систему (БАС), в состав которой входят аппаратно-программные комплексы (АПК) на базе персональных компьютеров. Одновременно ВНИИЖТ совместно с РНИИ-КП произвел разработку нового вагона-путеизмерителя ЦНИИ-4 с лазерной бесконтактной системой измерения параметров.
В результате ряда модернизаций, в том числе связанных со сменой базовой модели пассажирского вагона, были выпущены серии вагонов-лабораторий КВЛ-П1МП и КВЛ-П2, которые в настоящее время является основным средством контроля на сети ОАО «РЖД». Разработан новый вагон КВЛ-П.3 с лазерной системой измерения параметров. Вагоны серии КВЛ-П обеспечивают в автоматическом режиме съем и обработку основных (нормируемых) и дополнительных параметров, позволяющих более полно и объективно оценить состояние пути. К основным функциям относятся:
— контроль геометрических параметров рельсовой колеи (ширина колеи (шаблон), положение рельсовых нитей по высоте (уровень), просадки правой и левой рельсовых нитей и положение их в плане в плане (рихтовка));
— оценка в баллах состояния пути по геометрическим параметрам; обработку дополнительных параметров (скорость, расстояние, время);
— обработка параметров привязки к исследуемому участку пути (координат километровых столбов, переездов, стрелочных переводов);
— документирование сверхоперативной информации об обнаруженных местах пути с грубыми и опасными отступлениями с одновременной выдачей звукового и светового сигнала, индикацией на мониторе;
— документирование оперативной информации в объеме, достаточном для принятия мер по обеспечению безопасности движения поездов, а также для планирования путевых работ текущего содержания пути;
— документирование нормативно-отчетной информации в пределах; границ административного деления дистанции.
Рис. 11.7. Компьютеризированный вагон-лаборатория КВЛ-П1МП:
общий вид (а) и схема расположения основных элементов (б):
1 – навесные балки с измерительными устройствами; 2 и 6 – задняя и передняя (котловая) ходовые тележки типа КВЗ-ЦНИИ;
3 – кузов; 4 – тормозная и рабочая пневмосистемы; 5 – ящик с аккумуляторными батареями; 7 – кабельная сеть;
8 – датчик измерения угла наклона кузова к горизонту; 9 и 11 – аппаратно-программные комплексы; 10 – пульт управления БАС
Компьютеризированный вагон-лаборатория для записи и обработки геометрических параметров рельсовой колеи КВЛ-П1МП (рис. 11. 7, а) производится на базе купейного пассажирского вагона, кузов которого опирается на две ходовых тележки типа КВЗ-ЦНИИ: заднюю 2 и переднюю 6 (котловую – по названию котла водяной системы обогрева). Так как механизмы путеизмерителя с датчиками измеряют смещения кузова вагона относительно элементов (колесных пар с буксами), положение которых жестко связано с положением пути, то на задней тележке дополнительно смонтированы балки 1, опирающиеся на буксы. Балки образуют вместе с измерительными тележками спереди и сзади тележки 2 жесткую конструкцию, позволяющую позиционировать контактирующие измерительные элементы относительно рельсов.
Кузов 3, в соответствии со спецификой разъездного характера работы двух экипажей, разделен на зоны:
— рабочую, содержащую аппаратную и мастерскую;
— жилую, содержащую пять или шесть двухместных купе, и бытовую, содержащую кухню, душ, туалет, отопительные устройства и системы жизнеобеспечения).
Рис. 11.8. Схема расположения датчиков на путеизмерителе УВД-П1МП:
Д1 – Д6 – датчики линейных вертикальных перемещений буксовых узлов колесных пар;
Д7 – датчик бокового наклона кузова относительно горизонта;
Д8, Д9, Д20 и Д21 – датчики ускорений для контроля коротких неровностей, вызванных волнообразным
износом поверхностей катания головок рельсов;
Д10 и Д11 – датчики линейных перемещений механизма измерения ширины колеи;
Д13, Д14, Д16 и Д17 – датчики линейных перемещений механизма измерения положения рельсовых нитей в плане;
Д24 – датчик Холла измерения скорости и пройденного пути
В аппаратной (рис. 11. 7, б), разделенной прозрачной перегородкой на две части, установлены два аппаратно-программных комплекса 9 и 11, столы и сиденья для сопровождающих, зона оперативного контроля (перед задними окнами), организационно-техническое автоматизированное рабочее место (ОТ АРМ) в зоне аналитической обработки, аудио и видеосистему, позволяющую визуально наблюдать поверхности головки рельсов и колесной пары на мониторах. Видеозапись выполняется с привязкой к записи параметров измерения, поэтому может быть организован просмотр локальных мест отступлений при анализе данных измерений. В мастерской установлены шкаф рабочей пневматической системы, шкаф системы электроснабжения (ения (СЭС), зарядное устройство, блоки радиостанции, шкаф для одежды, шкаф для ЗИП, верстак Большинство измерительных механизмов с датчиками, для удобства наблюдения и технического обслуживания, расположены снизу кузова вагона (рис. 11.8) [46].
Рис. 11.9. Колебания кузова путеизмерителя по степеням свободы относительно рельсовой колеи,
которые учитываются компенсацией в схемах измерения параметров:
1, 4 и 6 – линейные колебательные смещения по осям координат:
z – подпрыгивание; y – боковой относ; x – подергивание;
2, 3 и 5 – угловые колебательные смещения относительно осей координат:
y – продольная качка (галопирование); x – боковая качка; z – виляние
Кузов вагона опирается через двухступенчатое рессорное подвешивание тележек на колесные пары и при движении по неровностям совершает дополнительные колебательные движения с шестью степенями свободы (рис. 11.9). Колебания носят случайный характер, поэтому вызванные ими перемещения чувствительных элементов датчиков также случайны и должны быть скомпенсированы путем ввода поправок в систему обработки первичной информации датчиков.
Рис. 11.10. Типовой механизм измерения линейных перемещений путеизмерителей серии КВЛ-П:
1 и 4 – двойной масштабный и обводной блоки; 2, 11, 14 и 15 – кронштейны крепления элементов механизма;
4 – тросы; 5 и 12 – основания; 6 – шкив; 7 – направляющие пружины; 8 – коуш; 9 – регулировочный винт с проушиной;
10 – пружина натяжения тросов; 13 – сельсин датчик
На путеизмерителях серии КВЛ-П применяются типовые датчики линейных перемещений. В варианте конструктивного исполнения такого датчика (рис. 11.10) смещения троса 4, поддерживаемого в состоянии натяжения пружиной 10, передаются через систему блоков 1 и 3 на шкив 6. Шкив соединен через муфту с валом сельсина-датчика 13 и поворачивается при смещениях тросов. В варианте исполнения имеется двойной масштабный блок, который уменьшает угол поворота вала сельсина в пределы 30°, при котором его электромеханическая характеристика может приниматься линейной. В других вариантах исполнения трос от перемещаемого элемента путеизмерителя соединяется прямо со шкивом 6, имеющим диаметр, согласованный с допустимым углом поворота сельсина-датчика.
Рис. 11.11. Схема механизма измерения ширины колеи (шаблон):
1 – рельсовые нити; 2 – измерительные ролики; 3 и 7 – обводные ролики; 4 – параллелограммные подвески;
5 – пневмоцилиндры; 6 – рычаги с блоками; 8 – шкив; 9 – сельсины-датчики; 10 – натяжные пружины;
11 – связи к отводным роликам (условно не показаны); 12 – измерительная тележка, связанная с продольными балками
Механизм измерения ширины колеи (рис. 11.11) включает два ролика 2, которые ребордами контактируют при движении вагона с боковой и верхней рабочими поверхностями головок рельсов 1. Внутренние реборды катятся по внутренним поверхностям головок рельсов на расчетном расстоянии от УВГР 13+3 мм. При изменении ширины колеи изменяется расстояние между роликами, Эти смещения передаются через тросы на рычаги 6, которые поворачиваются с изменением расстояния между закрепленными на них роликами. Трос, проходящий через обводные блоки 3 и 7, смещается, вызывая поворот шкива 8 и вала сельсина-датчика 9. Величина смещения равна изменению ширины колеи в масштабе 1:1. Пружина 10 служит для натяжения тросовой передачи. Датчик Д11 находится точно по середине кузова вагона, поэтому его подпрыгивание и галопирование приводят к колебаниям расстояния между блоками 3 и 7, которые надо компенсировать. Для компенсации используется система с датчиком Д10, трос которой связан с задней измерительной тележкой 12, жестко связанной с боковыми рамами задней ходовой тележки. Изменения ширины колеи, мм:
 (11.1)
(11.1)
где Km – масштабный коэффициент передачи сигнала от шкивов сельсинов к устройствам обработки и индикации; S10, S11 – перемещения тросов у шкивов датчиков Д10 и Д11, мм.
Рис. 11.12. Схема механизма измерения относительного положения рельсовых нитей по уровню:
1 – рельсовые нити; 2 – колесная пара, имеющая цилиндрические поверхности катания, с буксовыми узлами;
3 – кузов; 4 – обводные блоки; 5 – шкивы; 6 – сельсины-датчики; 7 – пружины;
8 – вухкоординатная гироскопическая платформа со следящими системами стабилизации положения относительно горизонта
Положение рельсовых нитей по уровню, определяемое через возвышение hв, мм (рис. 11.12) должно определяться от искусственного горизонта, положение которого не зависит от колебаний кузова вагона при движении по неровностям пути. Таким устройством является двухкоординатная гироскопическая платформа 8 со следящей системой стабилизации положения. Датчик Д7 позволяет измерить угол b, рад, наклона кузова относительно вертикали, создаваемой гироскопической платформой. Этот угол является алгебраической суммой углов a, рад, и g, рад, соответственно, наклона УВГР к горизонту и наклона кузова относительно УВГР, т.е.:
 (11. 2)
(11. 2)
где γ 1, γ 2 – углы наклона кузова относительно УВГР влево и вправо, рад. Положение кузова это результат сложения этих углов с учетом знаков.
Считая эти углы малыми, можно написать соотношения:
 (11.3)
(11.3)
где S, Sв – расстояния между осями рельсовых нитей (S = 1600 мм) и между точками закрепления тросов на буксах (Sв = 2050 мм); h1, h2 – смещения тросов датчиков Д1 и Д2, мм.
После подстановок, искомое возвышение, мм:
 (11.4)
(11.4)
а если подставить конкретные значения размеров и учесть передачу сигнала к устройствам вывода, мм:
 (11.5)
(11.5)
Благодаря тому, что величины смещений тросов правого и левого датчиков учитываются с разными знаками, компенсируется изменение по высоте кузова вагона относительно УВГР при его колебаниях в вертикальной плоскости.
Первичная информация о положении правой и левой рельсовых нитей в горизонтальной плоскости определяется относительно хорды длиной 18,315 м (см. рис. 11.7) при измерении в точке на расстоянии 3,83 м (КВЛ-П-1МП и КВЛ-П-2). В качестве базовой хорды служит кузов вагона. Для измерения положения в плане правой рельсовой нити служат датчики Д13, Д17 и Д19 (рис. 11.13, а), а левой – датчики Д14, Д16 и Д18. Датчики Д13, Д14, Д16 и Д18 каждый представляют собой сельсин-датчик 6 (рис. 11.13, б), который шкивом 7 связан с тросом механизма, включающего обводные блоки 3 и 5, рычаг 4 и лыжу 2, контактирующую с головкой рельса. Датчики Д18 и Д19 соединены через тросы с рамой передней ходовой тележки.
Рис. 11.13. Схема механизма измерения стрел изгиба правой и левой рельсовых нитей в плане: расположение датчиков (а), механизм передачи смещений кузова относительно рельсовой нити на датчик (б) и схема ввода корректировок при смещении кузова вагона в передней точке:
1 – рельсовая нить, 2 – контактная лыжа; 3 и 5 – обводные блоки; 4 – рычаг; 6 – сельсин-датчик; 7 – шкив; 8 – натяжная пружина
В качестве примера рассмотрим измерительную схему левого рельса (рис. 11.13, в). Система должна обеспечивать измерение стрелы изгиба h16, мм, при боковом относе и вилянии кузова при движении вагона. В результате наблюдаются случайные смещения передней и задней измерительных точек относительно положения измерительной хорды 14–18, которые должны быть скомпенсированы соответствующим преобразованием сигналов датчиков Д14 и Д18. Например, при смещении переднего конца кузова на величину y18 измеренная датчиком Д16 смещение y16 = h16 + hк18, мм (hк18 – величина необходимой корректировки рассматриваемой стрелы изгиба, вызванная смещением кузова вагона в передней точке, мм). Аналогичные рассуждения можно привести и для случая смещения задней точки. С учетом соотношения плеч a и b хорды, а также учитывая суперпозицию смещений передней и задней точек кузова, величина измеряемой стрелы изгиба, мм:
 (11.6)
(11.6)
После подстановки значений плеч хорд для КВЛ-П-1МП и с учетом коэффициента передачи к воспроизводящему устройству, измеренная стрела изгиба в плане:
 (11.7)
(11.7)
Рис. 11.14. Схема механизма измерения просадок,
стрел изгиба рельсовых нитей в вертикальной плоскости и перекосов
Система датчиков, связанная с буксовыми узлами ходовых тележек (рис. 11.14), позволяет измерять и регистрировать положение правой и левой рельсовых нитей через просадки, стрелы изгиба в вертикальной плоскости относительно базы длиной 17 м в точке, лежащей на расстоянии 2,4 м от задней токи, а также через перекосы, измеренные относительно базы задней ходовой тележки или кузова. При измерении соответствующих параметров необходимо делать компенсацию на подпрыгивание, галопирование и боковую качку кузова вагона при движении, так как все датчики установлены на кузове вагона. Датчики Д1 – Д6 связаны трособлочными передачами с буксами, как было показано для схемы измерения уровня (см. рис. 11.12). Перечисленные параметры измеряются по точкам контакта поверхностей катания колес и рельсов на расстоянии S, мм, а смещения относительно кузова вагона 3 передаются через тросы, закрепленные на расстоянии Sв, мм, на буксовых узлах. Этот фактор тоже учитывается при выводе формул. Проведя аналогичные рассуждения, можно вывести необходимые зависимости, связывающие перемещения датчиков, показанных на рис. 11.14, со значениями измеряемых параметров.
Например, просадка правой рельсовой нити, мм;
 (11.8)
(11.8)
или для конкретных размеров КВЛ-П-1МП:
 (11.9)
(11.9)
Стрела изгиба в вертикальной плоскости правой рельсовой нити, мм:
 (11.10)
(11.10)
Для рассматриваемого путеизмерителя:
 (11.11)
(11.11)
Перекос пути, измеренный на базе ходовой тележки, мм:
 (11.12)
(11.12)
Для путеизмерителя КВЛ-П-1МП:
 (11.13)
(11.13)
Перекос пути, измеренный на базе кузова вагона, мм:
 (11.14)
(11.14)
Для путеизмерителя КВЛ-П-1МП:
 (11.15)
(11.15)
Рис. 11.15. Схема измерения периодических неровностей длиной l, м (а) и
амплитудно-частотная характеристика системы измерения положения рельсовых нитей в плане (б)
В приведенных формулах z1 – z6 – смещения тросов на шкивах датчиков Неровности рельсовых нитей распределены вдоль пути случайным образом и характеризуются разными длинами l, м (рис. 11. 15, а) и амплитудами H, мм, поэтому можно говорить о спектре неровностей. Возможность измерения неровностей с заданной погрешностью хордовой системой определяется в результате анализа амплитудно-частотной характеристики (рис. 11.15, б). На рисунке показана амплитудно-частотная характеристика системы измерения положения рельсовых нитей в плане. КВЛ-П-1МП позволяет контролировать неровности пути в плане длиной от 4,5 до 26 м с погрешностью измерения, равной погрешности измерения стрелы (h / H = 1). При допущении большей погрешности, длина измеряемой неровности может доходить до 40 м.
Рис. 11.16. Схема измерения коротких неровностей, вызванных волнообразным износом поверхностей катания головок рельсов:
1 – ходовая тележка; 2 – рычаг; 3 – пружина; 4 – контактная пластина
Путеизмеритель позволяет контролировать и другие параметры, например параметры коротких неровностей, связанных с волнообразным износом поверхности катания головок рельсов. Для этого используется инерционный метод (рис. 11.16): на рельс опускается контактная пластина 4 с датчиком ускорений. Пружиной 3 пластина прижимается. Необходимые параметры получаются путем интегрирования показаний датчика ускорений.
Рис. 11.17. Структурная схема компьютеризированного вагона-лаборатории КВЛ-П1МП:
АПК – аппаратно-программный комплекс; ИИС – информационно-измерительная система;
ОТ АРМ – организационно-технологическое автоматизированное рабочее место; РПГ – регулятор подвагонного генератора;
АБ БАС – аккумуляторная батарея БАС; УСО – устройство сопряжения с объектом; И-600 – инвертор марки И-600
Для исключения попадания контактирующих с рельсами элементов измерительной системы в желоба крестовин стрелочных переводов используются отводные ролики, которые связаны с указанными элементами, и при проходе стрелочного перевода контактируют с контррельсами. Эти ролики имеют электрическую изоляцию от корпуса вагона. При наезде на контррельс происходит замыкание электрической цепи отводной ролик – корпус вагона, что регистрируется БАС как проход стрелочного перевода Бортовая автоматизированная система измерений и обработки (БАС) (рис. 11.17) предназначена для автоматизации процессов контроля и балльной оценки геометрических параметров рельсовой колеи в составе КВЛ-П. Она обеспечивает:
— преобразование в электрические сигналы и цифровое кодирование перемещений чувствительных элементов измерительных подвагонных механизмов, угла наклона кузова к горизонту в поперечной плоскости, скорости движения и пройденного пути, управляющих воздействий оператора в моменты подъема измерительных роликов и внесения отметок в запись, перемещений отводных роликов при проходе стрелочных переводов; одов;
— оперативную обработку измерительной информации о геометрических параметрах положения рельсовых нитей;
— обработку измерительной информации с целью получения выходных форм данных об основных (нормируемых) и дополнительных (ненормируемых) геометрических параметрах рельсовой колеи, координатах отступлений и их протяженности;
— обработку управляющей информации;
— количественное отображение в выходных формах данных выявленных отступлений геометрических параметров рельсовой колеи от норм содержания с указанием координаты каждого отступления по каждому параметру, величины и протяженности отступлений на экране монитора и на ленте графического регистратора;
— отображение в выходных формах качественной и балльной оценки отступлений в соответствии с требованиями инструкции ЦП-515.
Информационно-измерительная система БАС КВЛ-П1МП в свой состав включает описанные выше датчики и аппаратуру, позволяющую согласовать сигналы датчиков с учетом компенсации колебаний кузова и при наличии опасных отступлений в геометрии пути воспроизвести звуковые и световые сигналы. Сигналы датчиков после предварительной обработки поступают на аппаратно-программный комплекс (АПК) оперативного контроля через устройства сопряжения с объектом УСО-1 и УСО-2. Эти устройства преобразуют электрические сигналы в цифровые коды для дальнейшей обработки на специальном вычислителе (компьютере) с использованием программного обеспечения. Результаты обработки отображаются на устройстве отображения информации – мониторе в виде диаграмм или в цифровом виде. Устройство регистрации позволяет накапливать информацию и распечатывать ее в виде лент, которые используются в качестве документов, передаваемых начальнику дистанции пути и в диагностический центр дороги.
Аппаратно-программный комплекс постобработки обрабатывает собранные данные во время движения или стоянки вагона-путеизмерителя, используя прикладное и специальное программное обеспечение (СПО).
Согласно инструкции ЦП-515 отступления контролируемых параметров рельсовой колеи от номинальных величин учитываются при автоматической расшифровке записей и оцениваются по их количеству и степеням. К I степени относятся отступления, не требующие выполнения работ по их устранению, поэтому они не учитываются при расшифровке записей. Ко II степени относятся отступления, также не требующие уменьшения установленной скорости движения поездов, но оказывающие влияние на плавность движения подвижного состава и интенсивность расстройства пути, особенно при частом повторении таких отступлений на километре. К III степени относятся отступления, которые при неустранении их после обнаружения могут за период очередной проверки пути путеизмерительным вагоном достичь величин, значительно ухудшающих плавность движения поездов и повышающих интенсивность накопления остаточных деформаций пути. Поэтому такие отступления жестче оцениваются по сравнению с отступлениями I и II степени и устраняются в первоочередном порядке. К IV степени относятся отступления, вызывающие рост сил взаимодействия пути и подвижного состава до величин, которые при наличии неблагоприятных сочетаний с отступлениями в содержании и загрузке подвижного состава, нарушениях режима ведения поезда и др. могут привести к сходу его с рельсов. Поэтом при обнаружении отступлений, относящихся к IV степени при данном интервале установленных скоростей движения, скорость уменьшается. А при отступлении, превышающем предельно допустимое значение, закрывается движение поездов, независимо от установленной скорости движения.
Качественная и балловая оценка рельсовой колеи по показаниям путеизмерительного вагона приведена в табл. 11.1.
Основные данные технических характеристик путеизмерителей приведены в табл. 11.2.
11.5. Скоростная путеобследовательская станция ЦНИИ-4МД
Скоростные путеобследовательские станции (ПС) системы ЦНИИ-4 предназначены для контроля геометрических параметров рельсовой колеи (модификации М, МД), и дополнительно габаритов вдоль пути (модификация МГ). Они являются структурными подразделениями дорожных Центров диагностики путевого хозяйства железных дорог. Контролируется состояние главных и станционных путей, оценивается состояние пути на дорожном и сетевом уровне.
ПС представляет собой переоборудованный купейный вагон типа 47Д, который включает аппаратный, щитовой, дизель-генераторный отсеки, салон и жилые купе. В аппаратном отсеке, в подкузовном пространстве и на ходовых тележках размещаются элементы контрольно-вычислительного комплекса (КВК). КВК оснащен аппаратурой, в состав которой входят бесконтактные измерительные системы на базе оптических датчиков, прецизионная лазерная навигационная гиросистема и вычислительный комплекс из 3-х персональных компьютеров (ПЭВМ), объединенных локальной сетью. Работа КВК обеспечивается системой специализированного программно-математического обеспечения (СПМО).
Путеобследовательская станция ЦНИИ-4МД оснащена оптическими и электромеханическими системами для определения основных параметров геометрического положения рельсовых нитей (см. предыдущий пункт), а также дополнительными оптическими измерительными системами определения зазоров в рельсовых стыках, бокового износа, температуры рельсов и системой контроля неровностей на поверхности катания рельсов. Контролируется более 20 параметров ж.д. пути, часть которых определяется непосредственно в процессе поездки, часть вычисляется после нее.
В процессе поездки определяются параметры: ширина рельсовой колеи; просадки рельсовых нитей в вертикальной плоскости; взаимное положение рельсовых нитей по высоте (уровень); стрелы изгиба в плане от несимметричной хорды (рихтовка); перекосы пути на базе кузова и ходовой тележки; уклон продольного профиля пути; кривизна пути в плане; боковой износ рельсов (износ); величина стыковых зазоров; температура рельсов; горизонтальные и вертикальные ускорения кузова; скорость движения ПС; длина пройденного пути (местоположение ПС). После поездки с использованием СПМО вычисляются параметры: отметки продольного профиля пути; неровности продольного профиля пути; параметры устройства кривых участков пути; отклонение от прямолинейного положения прямых участков пути; горизонтальные неровности в прямых участках пути; наличие неровностей на поверхности катания рельсов; статистические характеристики геометрических параметров рельсовой колеи.
ПС постоянно оснащается новым оборудованием и программно-математическим обеспечением для расширения функ-циональных возможностей и номенклатуры решаемых задач. ПС может работать в составе скорых и пассажирских поездов, или с отдельным локомотивом. Потребителями информации являются: службы пути железных дорог, дорожные Центры диагностики, проектные организации, дистанции пути и Департамент пути и сооружений ОАО «РЖД».
Рис. 11.18. Путеобследовательская станция ЦНИИ-4МД: схемы расположения датчиков (а) и контрольно-вычислительного комплекса (б):
ПУ СОД – пульт управления системы оптических датчиков; КСУ – кросс-соединительное устройство;
ПЭВМ-1 – ПЭВМ-3 – персональные компьютеры, объединенные в локадбную сеть;
СПМО-1 – СПМО-3 – специальное программно-математическое обеспечение;
ИНС – инерциальная гиросокопическая навигационная система; СНС – спутниковая навигационная система ГЛОНАСС/GPS;
датчики: РК1 – РК3 – вертикальных и горизонтальных перемещений головки рельса относительно кузова; ШК1 и ШК2 – ширины колеи;
ИР1 и ИР2 – износа головок рельсов; СЗ1 и СЗ2 – ширины стыковых зазоров; МСЗ1 и МСЗ2 – магнитные датчики определения стыковых зазоров;
ТР1 и ТР2 – температуры рельсов; НК1 и НК2 – неровностей на поверхности катания головок рельсов; ПП – пройденного пути;
БК1 – БК6 – вертикального перемещения букс относительно кузова; ГУБ-1 и ГУБ-2 – горизонтальных ускорений букс;
ВУБ1 и ВУБ2 – вертикальных ускорений букс
Датчики на базовом вагоне размещаются на кузове в подкузовном пространстве и на специальных неподрессоренных элементах ходовых тележек (рис. 11.18, а). Датчики входят в состав КВК (рис. 11.18, б). Оптические датчики включены в систему через соответствующий пульт управления ПУ СОД, а другие датчики – через кросс-соединительное устройство. Система позволяет контролировать состояние пути через основные параметры по типовым схемам измерений вагонов-путеизмерителей в соответствии с инструкцией ЦП-515, производить оценку пути по дополнительным параметрам. Результаты измерений могут выводиться в виде диаграмм, таблиц и сводных ведомостей на мониторах компьютеров, накапливаться и передаваться в базы данных различного уровня, распечатываться в виде путеизмерительных лент и отчетов. Все данные привязываются к местности через системы навигации и систему маркеров на объектах вдоль пути. Объем данных может соответствовать до 10000 км пути.
Рис. 11.19. Схема измерения ширины колеи оптическими датчиками:
1, 2, 7 и 8 – объективы; 3 и 6 – оптические источники лазерного луча; 4 и 5 – линейные матрицы фотоэлементов (ПЗС-линейки);
9 – неподрессоренная балка ходовой тележки; 10 и 11 – рельсовые нити
В качестве примеров рассмотрим принцип действия основных оптических систем ПС. Система измерения ширины колеи (рис.11.19) включает в себя два источника оптического излучения 3 и 6. Используется монохромный луч лазера, который в меньшей степени подвержен засветкам при дневном освещении. Через объективы 2 и 7 на боковой поверхности головок рельсов 10 и 11 на расстоянии 15 мм ниже УВГР высвечиваются узкие горизонтальные световые полосы. Положение этих полосы относительно неподрессоренной балки 9 определяется фотоприемниками, имеющими объективы 1 и 8 и линейные матрицы фотоэлементов 4 и 5. Фотоприемники по конструктивному устройству являются своеобразными цифровыми фотоаппаратами с линейной матрицей засвечиваемых светодиодов большой разрешающей способности.
Ширина колеи, мм, определяется по формуле:
 (11.16)
(11.16)
где DX1,2 = (Nj(1,2) – N0(1,2))dS/fпр – относительное перемещение рельса; Nj(1,2) – текущее значение параметра светочувствительного элемента ПЗС-линейки, соответствующее геометрическому центру изображения световой полосы первого или второго датчика; N0(1,2) – номер светочувствительного элемента ПЗС-линейки, соответствующий началу отсчета; d – шаг светочувствительных элементов ПЗС-линейки; S – расстояние от датчика до рельса; fпр – фокусное расстояние объектива приемной части; Bш – базовое расстояние между датчиками.
Вследствие изменений величин DX1 и DX2 по сравнению с определенными при настройке на номинальный размер ширины колеи (1520 мм) световая полоса смещается вверх (уменьшение расстояния) или вниз (увеличение расстояния). Это смещение приводит к засветке соответствующего фотоэлемента на линейке, по номеру которого оценивается рассматриваемое расстояние.
Частота съема информации 250 Гц, что соответствует отсчетам через 0,16 м пути при скорости движения путеизмерителя 144 км/ч.
Рис. 11.20. Схема измерения горизонтальных и вертикальных перемещений головки рельса относительно кузова оптическим датчиком;
1 и 2 – оптические источники лазерного луча; 3, 4 и 11 – объективы; 5 и 7 – синхронно вращающиеся со смещением по фазе зеркала;
6 и 8 – неподвижные зеркала; 9 – фотоэлемент; 10 – фотоприемная камера; 12 – рельсовая нить;
фотодатчики: ДН1 и ДН2 – начала отсчета; ДК1 и ДК2 – конца отсчета
Система контроля относительных смещений головки рельса и кузова вагона (рис. 11.20) состоит из двух оптических лазерных источников 1 и 2, которые через объективы 3 и 4 посылают сфокусированный лазерный луч на зеркала 5 и 8. Отраженные лучи попадают на зеркала 5 и 7, которые синхронно вращаются и смещены по фазе вращения друг относительно друга. Отраженный от вращающегося зеркала, например зеркала 7, луч проходит через головку рельса, создавая на ней световое пятно, пробегающее от внешней стороны головки до внутренней стороны. Световое пятно регистрируется фотоприемной камерой 10. После ухода пятна за внутреннее скругленное ребро головки рельса оно «исчезает» для камеры 10. В момент исчезновения пятна регистрируется положение зеркала 7, соответственно, угол a1. Световой датчик ДН1 начала отсчета включает систему регистрации положения пятна на головке рельса, а другой такой же датчик ДК1 конца отсчета отключает указанную систему. Для определения расстояния используется бинокулярный принцип, поэтому имеется вторая такая же система с зеркалом 5. Датчики начала и конца отсчета служат для идентификации последовательно появляющихся и исчезающих световых пятен, отраженных от зеркал 5 и 7. В течение одного оборота происходит сначала регистрация пятна от зеркала 7 (определяется угол a1), а затем – от зеркала 5 (определяется угол a2).
Зная a1 и a2, можно определить вертикальное H, мм, и горизонтальное L, мм, расстояния от датчика до рельса по формулам:
 (11.17)
(11.17)
где B – Фиксированное расстояние между осями вращающихся зеркал, мм.
Информация по расстоянию L используется для оценки положения рельсовых нитей в плане относительно традиционной хордовой системы длиной 21,5 м.
Частота съема информации в датчике РК, определяемая частотой вращения двигателя сканера, равна 70 Гц, что соответствует точкам отсчета через 0,6 м пути при скорости путеизмерителя 144 км/ч и точности ±2,5 мм.
Рис. 11.21. Схема измерения величины стыкового зазора aз:
1 и 2 – фотоприемники инфракрасного излучения; 3, 4 и 6 – объективы;
7 – световой источник инфракрасного диапазона; 8 – рельсовая нить со стыковым зазором
Система измерения стыковых зазоров (рис. 11.21) включает источник инфракрасного излучения 5, который через объектив 6 и систему оптических призм 7 отбрасывает на поверхность головки рельса две узких светящихся полоски, находящихся на расстоянии а, мм, друг от друга. При нахождении световых полосок на головке рельса они фиксируются через объективы 3 и 6 фотоприемниками 1 и 2, а при отбрасывании излучения в зазор оно не отражается и не попадает в соответствующую камеру. Система регистрирует наличие открытого зазора. Моменты прерывания и восстановления отражения регистрируются в реальном времени. Регистрируется время, соответствующее прохождению ПС расстояния a, поэтому измерения не привязаны к скорости движения. Величина зазора, мм:
 (11.18)
(11.18)
где tз, ta – время прохода зазора и базового расстояния a, с.
Системой не регистрируются закрытые (сомкнутые) стыковые зазоры (aз = 0), поэтому система содержит магнитные датчики определения зазоров МСЗ1 и МСЗ2. Принцип действия этих датчиков аналогичен принципу действия магнитного дефектоскопа (см. следующий пункт).
Созданы аналогичные диагностические комплексы, например АДК-И, в состав которого входит путеизмеритель КВЛ-П3 с расширенным набором функциональных возможностей, совмещенный с ультразвуковым и магнитным дефектоскопом, и вагон-лаборатория для обследования контактной сети, автоматики и поездной радиосвязи.
11.6. Комплексные методы качественной и количественной оценки состояния пути
По полученным с помощью путеизмерительных средств основным геометрическим параметрам рельсовой колеи осуществляется оценка технического состояния рельсовой колеи и пути в целом.
Различаются следующие практические способы оценки состояния пути: выявление и оценка неисправностей; качественная (интегральная); комплексная.
Качественная оценка производится по показаниям путеизмерительных средств (КВЛ-П1, КВЛ-П1М, КВЛ-П1МП) в баллах в соответствии с Инструкцией ЦП-515. Оценка производится в зависимости от обнаруженных отступлений рельсовой колеи. Оценка дается для каждого проверенного километра пути, участка путей в пределах административных подразделений дистанции пути, в целом по дистанции пути, отделений дорог и железных дорог. В границах административной единицы балловая оценка определяется как средневзвешенная по километрам данной единицы. Балловая оценка относится к числу основных производственных показателей дистанций пути. В зависимости от выполнения плановых заданий по балловой оценке производится оплата труда работников дистанций пути (см. табл. 11.1).
Комплексная оценка технического состояния пути предназначена для решения следующих задач путевого хозяйства:
– установление скоростей движения поездов, обеспечивающих получение максимального дохода от перевозочного процесса при минимизации затрат на поддержание необходимого технического состояния пути и соблюдения норм безопасности движения;
– определение возможных причин неправильного функционирования и отказов железнодорожного пути;
– регулирование периодичности контроля пути;
– определение потребности в проведении ремонтно-путевых работ;
– оценка качества и эффективности проведенных ремонтов пути;
– оценка качества работы подразделений путевого хозяйства.
Комплексная оценка рассматривается в настоящее время, в большей мере, как перспективная, поскольку ее нормативная база находится в стадии разработки.
Информационной основой комплексной оценки состояния железнодорожного пути должны служить данные, получаемые как с действующих путеизмерительных средств, так и с вновь разрабатываемых диагностических средств (в том числе с помощью скоростных совмещенных путеобследовательских станций ЦНИИ-4МД и КВЛ-П3).
11.7. Оборудование для дефектоскопии рельсов
Важнейшим фактором, влияющим на обеспечение безопасности движения поездов в путевом хозяйстве железных дорог, является своевременный контроль состояния рельсов средствами дефектоскопии.
Действующая классификация предусматривает 36 разновидностей дефектов рельсов, 22 из которых в виде изломов, усталостных трещин, расслоений являются опасными для движения поездов и требуют немедленной замены [46].
Неразрушающий контроль рельсов представляет собой трехуровневую систему:
— средства первичного сплошного контроля (дефектоскопные автомотрисы, и двухниточные съемные дефектоскопы); средства вторичного сплошного контроля (вагоны-дефектоскопы);
— средства локального контроля (переносные дефектоскопы для контроля сварных стыков, однониточные съемные дефектоскопы для контроля стрелочных переводов, выборочного контроля по показаниям дефектоскопных автомотрис и вагонов-дефектоскопов).
Контроль рельсов на рельсосварочных поездах предусматривает проведение входного контроля, пооперационного контроля, приемочного контроля рельсов после обработки стационарными и переносными дефектоскопами.
11.7.1. Методы дефектоскопии
Для контроля рельсов применяют акустические (ультразвуковые) и магнитные методы дефектоскопии.
Механические упругие колебания среды с частотой больше 20 кГц называют ультразвуковыми. В дефектоскопии рельсов используют свойство ультразвука практически полностью отражаться от границы стали с воздухом или воздуха с водой. При контроле рельсов используют ультразвуковые колебания с частотой 2,5 МГц. Для возбуждения и регистрации ультразвуковых колебаний такой частоты применяют пластины из материала, обладающего пьезоэлектрическими свойствами, – титаната бария.
Рис. 11.22. Прямой (а) и наклонный (б) преобразователи, основные свойства ультразвука (в, г, д, е):
1 – пьезопластина; 2 – демпфер; 3 – корпус; 4 – протектор; 5 – призма
Пьезоэлектрическими преобразователями-резонаторами (сокращенно – ПЭП) (рис. 11.22) ультразвуковые колебания возбуждаются или регенерируются в металле, если между преобразователем и металлом обеспечен акустический контакт, обуславливающий передачу ультразвуковых колебаний из преобразователя в металл и обратно. Ультразвуковые волны – механические возмущения (деформации), при распространении которых в упругом теле частицы среды не переносятся, а лишь совершают колебания относительно точки равновесия.
Рис. 11.23. Схемы распределения импульсов на излучающем и приемном искателях по методам:
а – теневому; б – зеркально-теневому; в – эхо-методу
При ультразвуковой дефектоскопии в зависимости от признака обнаружения дефекта в основном применяют три метода: теневой, зеркально-теневой и эхо-метод (рис. 11.23). По теневому методу (а) признак обнаружения дефекта – уменьшение интенсивности (амплитуды) ультразвуковой волны, прошедшей через изделие от излучающего искателя И к приемнику П. По зеркально-теневому методу (б) признак обнаружения дефекта – уменьшение интенсивности (амплитуды) отраженной от противоположной поверхности изделия (например, подошвы рельса) ультразвуковой волны, излучаемой искателем И и принимаемой искателем П. Противоположную поверхность, зеркально отражающую ультразвук, называют донной поверхностью, а отраженный от нее импульс-донным импульсом, По эхо-методу (в) признаком обнаружения дефекта является прием искателем П эхо-импульса, отраженного от данного дефекта.
Рис. 11.24. Функциональная схема зеркально-теневого дефектоскопа для контроля рельсов
Функциональная схема зеркально-теневого дефектоскопа (канала) приведена на рис. 11.24. Генератор Г вырабатывает импульсы электрических колебании; искатель I преобразует электрические колебания в ультразвуковые и излучает их в контролируемый рельс. Ультразвуковой импульс, отразившись от противоположной поверхности рельса (подошвы) – донной поверхности, воспринимается тем же искателем и преобразуется в импульсы электрических колебаний. Этот импульс (донный импульс) усиливается в приемнике Пр. В момент излучения зондирующий импульс с генератора Г поступает на вход каскада временной задержки ВЗ.
Каскад ВЗ на своем выходе вырабатывает импульс, сдвинутый во времени по отношению к зондирующему импульсу. В каскаде ВЗ происходит задержка импульса на некоторое время задержки, устанавливаемое ручкой Т. Импульс с выхода каскада ВЗ подается на генератор строб-импульса (генератор селектирующего импульса).
В момент поступления задержанного импульса этот генератор вырабатывает импульс прямоугольной формы, используемый в последующем для выделения (селектирования) нужных эхо-сигналов и называемый поэтому селектирующим импульсом, или строб-импульсом. Строб-импульс подается на вход каскада совпадений КС. На индикатор И с выхода каскада совпадений будут поданы те из донных импульсов, с которыми совмещен во времени строб-импульс. Поворачивая ручку Т в каскаде временной задержки, совмещают строб-импульс с соответствующими донными импульсами. Время задержки строб-импульса при настройке на один и тот же донный импульс зависит от высоты (типа) рельса. Индикатор И срабатывает при уменьшении амплитуды донного импульса до определенного значения, чувствительность дефектоскопа настраивается по имитатору дефектов ручкой «чувствительность» (Ч). Искатель II применяется в системе «калибр» для контроля зоны болтовых отверстий.
Рис. 11.25. Эхо-импульсный дефектоскоп:
а – функциональная схема; б – формы напряжений в точках функциональной схемы;
в – схема прозвучивания рельса при выявлении дефектов видов 20 и 21 (поперечные трещины в головке рельсов)
Функциональная схема эхо-импульсного дефектоскопа (канала) приведена на рис. 11.25, а. Из совокупности импульсов на выходе приемника (точка 2) на индикаторы поступят лишь те из них, которые совпали по времени со строб-импульсом, вырабатываемым генератором стробирующих импульсов ГСИ. Начало строб-импульса, а следовательно, глубина h начала контролируемого слоя определяется длительностью импульса t3, на выходе каскада временной задержки ВЗ. Глубина h связана с временем t3 соотношением , где С — скорость распространения ультразвука; а – угол ввода луча.
Для контроля рельса, начиная от поверхности (h=0), необходимо, чтобы время задержки стробирующего импульса было равно времени прохождения ультразвука в призме искателя, т.е. t3=2tn. Длительность tc строб-импульса определяет размер контролируемого слоя Н:
 (11.19)
(11.19)
Меняя длительность строб-импульса, можно изменять размер контролируемого слоя, а при t3=2tn – глубину контроля.
Координаты отражающей поверхности в контролируемом слое определяют глубиномером. Сварные стыки контролируют наклонными искателями, которые перемещают вручную по периметру рельса в зоне сварки. Основной металл головки по всей длине рельса проверяют наклонным искателем с углом ввода луча α = 60°. Искатель перемещают вдоль рельса по поверхности катания над шейкой.
Для выявления поперечных трещин в головке рельсов искатель поворачивают относительно продольной оси рельса на угол γ = 35°, При этом дефекты обнаруживаются лучом, отраженным от нижней поверхности головки рельса (рис. 11.25, в).
Принципы формирования сигналов ультразвукового контроля в современных дефектоскопах и особенности их расшифровки рассмотрим на примере дефектоскопа сплошного контроля Авикон-01МР.
Рис. 11.26. Схемы формирования сигналов от дефектов различными каналами дефектоскопа АВИКОН-01МР:
каналы 0 и 1 (а); каналы 2 и 3 (б), каналы 4 и 5 (в) и каналы 6, 7, 8 и 9 (г)
Контроль сечения рельса с помощью прямого преобразователя (каналы 0 и 1). Преобразователь 1 (рис. 11.26) представляет собой раздельно-совмещенный ПЭП. Осуществляет контроль головки, шейки и подошвы рельса и реализует зеркально-теневой и эхо-методы контроля.
Канал 0 выделяет донные сигналы и реализует зеркально-теневой метод контроля. Канал 1 фиксирует эхо-сигналы от возможных дефектов по высоте рельса во временной зоне, охватывающей практически всю высоту рельса (а).
Каналы контроля головки рельса эхо-методом наклонными преобразователями (канал 2 «наезжающий», канал 3 «отъезжающий»). Осуществляют контроль рабочей грани головки рельса и реализует эхо-метод контроля. Угол ввода ультразвуковых колебаний составляет 58 градусов, угол разворота 34 градуса в сторону рабочей грани (б).
Каналы контроля головки рельса зеркальным методом наклонными преобразователями (канал 4 «наезжающий», канал 5 «отъезжающий»). Осуществляют контроль рабочей грани головки рельса совместно с каналами 2 и 3. Работают только на прием переотраженных от зеркальной плоскости поперечной трещины эхо-сигналов и реализуют зеркальный метод контроля. Угол приема ультразвуковых колебаний составляет 58°, а угол разворота оси приема ПЭП 34° в сторону рабочей грани (в).
Каналы контроля шейки и подошвы рельса наклонными ПЭП (каналы 6 и 8 «наезжающие», каналы 7 и 9 «отъезжающие»). Реализуют эхо-метод контроля и осуществляют контроль шейки и подошвы (в проекции шейки) рельса в двух временных зонах. Контроль зоны шейки рельса осуществляется каналами 6 « наезжающий» и 7 «отъезжающий» при одной чувствительности, а зона подошвы каналами 8 «наезжающий» 9 «отъезжающий» при более высокой чувствительности. Угол ввода ультразвуковых колебаний составляет 45° (г).
Рис. 11.27. Формирование «А» и «В» разверток
Для наблюдения результатов прозвучивания рельсов используют развертки принимаемых сигналов, позволяющие распознать дефект и определить его локализацию (рис. 11.27).
Развертка типа “А” позволяет наблюдать амплитуду, форму и временное положение эхо-сигнала от отражателя в изделии в каждый момент времени, но не позволяет проследить изменение этих параметров при перемещении преобразователя.
При ультразвуковом контроле железнодорожных рельсов, для регистрации информации используют представление сигналов на развертке типа «В».
«В» развертка – это изображение эхо-сигналов в виде точек с координатами: по оси Y — амплитуда эхо-сигнала, а по оси X перемещение (путь ПЭП) на поверхности контролируемого изделия (при постоянной скорости движения ПЭП координата Y пропорциональна времени). Эхо-сигналы в этих координатах отображаются в виде точек (яркостных пятен). При таком представлении эхо-сигнала теряется информация об амплитуде и форме сигнала, но отображение более наглядно представляет взаимное расположение отражателей в контролируемом изделии.
11.7.2. Съемные и переносные дефектоскопы
Эти дефектоскопы предназначены для обнаружения дефектов в обеих нитях железнодорожного пути по всей длине и сечению рельсов за исключением перьев подошвы и зон шейки над и под болтовыми отверстиями ультразвуковыми пьезоэлектрическими преобразователями (ПЭП), при сплошном контроле со скоростью до 4 км/ч, выборочного ручного контроля отдельных сечений рельсов ручными ПЭП, а также определения координат обнаруженных дефектов и амплитуд сигналов от них.
Рис. 11.28. Дефектоскоп АВИКОН-01:
1 – очистительное устройство; 2 – ручка; 3 – сигнальный диск; 4 – тормозное устройство; 5 – колесо; 6 – аккумулятор;
7 – подъемное устройство; 8 – разъем; 9 – блок резонаторов; 10 – блок Электронный; 11 – ферма; 12 – ящик для инструмента;
13 – пульт подключения ручных искателей; 14 – бачок; 15 – центрирующее устройство; 16 – регистратор
На сети ОАО «РЖД» находят все большее применение современные модели съемных дефектоскопов: АДС-02, АВИКОН-01МР и РДМ-2 и их новые модификации Авикон-11, РДМ-33 (см. табл. 11.3). Дефектоскоп АВИКОН-01МР (рис. 11.28) монтируется на тележке 11, которая предназначена для размещения электронного блока 10 при работе дефектоскопа на линии, перемещения и центрирования искательных систем – блоков резонаторов 9 на рельсах в процессе работы дефектоскопа.
Несущим узлом дефектоскопной тележки является сварная трубчатая ферма 11 с кронштейнами для крепления колес и ручками 2 для переноски двумя операторами. На трубчатой ферме размещены:
— подъемное устройство 7;
— центрирующие механизмы 15;
— два бачка для контактирующей жидкости 14, ящик (для аккумуляторных батарей) 6;
— ящик (для инструмента и принадлежностей) 12;
— четыре пластмассовых колеса 5, очистительные устройства 1;
— тормозное устройство 4;
— флажок 3;
— два пульта подключение ручных искателей 13, регистратор 16 и четыре блока преобразователей (по два на каждую рельсовую нить) 9 с кабелями 8;
— комплект инструмента и принадлежностей для измерения и маркировки дефектов, ограждения дефектоскопа и опасных мест в пути.
Контроль каждой нити железнодорожного пути осуществляется двумя блоками резонаторов (преобразователей) БР1 и БР2, прозвучивающих зоны головки, шейки и подошвы (за исключением перьев подошвы) рельса под различными углами по различным схемам прозвучивания.
Новая модификация дефектоскопа АВИКОН-11 позволяет вести расшифровку результатов контроля непосредственно в пути, с уточнением характеристик дефектов с развертками типа “A” и “В”, при движении дефектоскопа, имеет расширенный набор сервисных функций, дополнительно применяется зеркальный метод контроля.
Дефектоскоп РДМ-22 также используется для сплошного, при движении со скоростью до 4 км/ч, и выборочного контроля рельсов вручную.
Рис. 11.29. Основная схема прозвучивания при сплошном контроле рельсовой нити дефектоскопом РДМ-22
Основная схема прозвучивания для сплошного контроля обеих нитей пути предусматривает по восемь каналов прозвучивания для каждой нити и реализацию на их основе девяти информационных каналов. При этом восемь информационных каналов используют эхо-метод и один информационный канал – зеркально-теневой метод (ЗТМ). Каждому каналу прозвучивания присвоен условный номер канала (1, 2, 3, 4, 5, 6, 7, 8) в соответствии с рис. 11.29.
На основе данной схемы прозвучивания реализуются два основных режима сплошного контроля рельсов оператором дефектоскопа при использовании им звуковой и световой системы сигнализации дефекта. Первый режим используется для контроля рельсов на участках пути вне зон стыков с болтовыми отверстиями, второй – на участках пути в зоне стыков с болтовыми отверстиями. Предусмотрена непрерывная регистрация результатов контроля в виде дефектограмм проконтролированных участков.
Основные характеристики некоторых применяемых на железных дорогах России съемных дефектоскопов сплошного контроля приведены в табл. 11.3.
С целью комплексной оценки состояния пути разработан дефектоскоп-путеизмеритель системы «СПРУТ» (УДС-106Т). Он позволяет производить сплошной контроль дефектов при непрерывном движении со скоростью до 5 км/ч, выборочный контроль дефектов, а также измерение ширины колеи и взаимного положения рельсов по уровню с привязкой результатов контроля к положению вдоль пути. Записанная информация может выводиться на ПЭВМ для анализа.
Для выборочного контроля рельсов в стесненных условиях и элементов стрелочных переводов применяются однониточные переносные дефектоскопы УРДО-3, УДС1-РДМ-1,УДС1-РДМ-1М. Например, дефектоскоп УДС-1-РДМ-1М предназначен для вторичного ультразвукового контроля эхо-импульсным и зеркально-теневым методами одной нити железнодорожного пути, а также для контроля рельсов соединительных путей, остряков и рамных рельсов стрелочных переводов. Содержит три независимых дефектоскопических канала, два из которых работают с наклонными пьезопреобразователями для обнаружения внутренних дефектов в головке рельса эхо-методом, и один – с раздельно-совмещенным преобразователем для обнаружения дефектов в шейке рельса (эхо и зеркально-теневом методе). Сигнализация о наличии дефектов – звуковая на головные телефоны, а индикация глубины залегания дефектов в миллиметрах на светодиодном индикаторе.
Дефектоскоп состоит из штанги, на которой монтируется бак для контактирующей жидкости, блок пьезоэлектрических преобразователей и электронный блок с рукояткой, в которой размещены аккумуляторы. Конструкция штанги позволяет отрегулировать высоту дефектоскопа, удобную для оператора.
Дефектоскопы для вторичного выборочного контроля рельсов и дефектоскопии сварных швов.
Дефектоскопы РДМ-3, РДМ-33, Авикон-02 и Пеленг применяемые на железных дорогах предназначены для выявления эхо-методом, теневым методом, зеркально-теневым методом, эхо-зеркальным методом ультразвукового контроля внутренних дефектов (трещин, пор, расслоений, непроваров, шлаковых включений и т.п.) в сварных соединениях из сталей и сплавов, выполненных электродуговой, газовой, термитной и стыковой сваркой оплавлением (табл. 11.3). Содержит два независимых дефектоскопических канала. Контроль сварного шва ведется по всему периметру ручным искателем.
При наличии в них электронно-лучевой трубки и дополнительных устройств измерения и индикации дефектов позволяют проводить более качественный вторичный контроль по показаниям вагонов и автомотрис, устанавливать степень развития дефектов. Индикация осциллограмм контроля, номера канала, режима работы и измерения, установленного усиления приемника, (дБл), угла ввода УЗК, положения метки глубиномера, (мкс), или координат дефекта, (мм), производятся на экране электронно-лучевой трубки или жидко-кристаллическом экране. Возбуждение и прием ультразвуковых колебаний, например, в дефектоскопе АВИКОН-02Р, осуществляется посредством ручных ПЭП или резонаторов. Для уточнения координат дефектных сечений рельсов, представленных по показаниям мобильных средств дефектоскопии к вторичному контролю, в комплекте дефектоскопа предусмотрено наличие двух блоков резонаторов БР1 и БР2, позволяющих повторить схему прозвучивания мобильного средства. Информацию о параметрах настройки дефектоскопа и о дефекте изображается на жидко-кристаллическом экране рис. 11.30 дефектоскопа.
Рис.11.30. Экран настройки дефектоскопа АВИКОН-01
Отличительными особенностями дефектоскопа являются:
– полуавтоматическая настройка чувствительности по эталонному отражателю;
– предварительная запись настроек в память дефектоскопа;
– хранение в памяти дефектоскопа типовых вариантов методов контроля, используемых при контроле рельсов, электроконтактных и алюмино-термитных сварных стыков рельсов;
– запись в протокол контроля изображения с экрана дефектоскопа с сигналами от дефекта в виде «стоп-кадра» и огибающей амплитуд сигналов от дефектов;
– изображение дефектов в контролируемом сечении в виде В-развертки;
– передача данных на персональный компьютер (ПК);
– формирование протоколов контроля на ПК с возможностью их распечатки на принтере;
Таблица 11.3 Основные технические характеристики дефектоскопов вторичного контроля и дефектоскопов для контроля сварных стыков
Обозначения:
1. ЖКД – жидкокристаллический дисплей;
2. ЭЛД – электролюминесцентный дисплей;
3. ЦД – цифровой дисплей;
4. ЗТМ – зеркально-теневой метод контроля;
5. ЭМ – эхо-метод контроля
– зависимость частоты тона звукового индикатора от значения превышения амплитудой эхо-сигнала порогового уровня дефектоскопа;
– запись в память дефектоскопа голосового комментария при записи результатов контроля.
Кроме традиционной, для ручных дефектоскопов, развертки типа А, в дефектоскопе АВИКОН-02 предусмотрена возможность отображения на ЖКД сигналов контроля на координатной плоскости «время распространения ультразвуковых колебаний в контролируемом изделии – время перемещения ПЭП по поверхности сканирования (или путь перемещения ПЭП)», т. е. развертки типа «В». При реализации развертки типа «В» на указанной координатной плоскости все эхо-сигналы, превышающие по амплитуде порог срабатывания звукового индикатора (АСД), отображаются в виде яркостной отметки (на ЖКД в виде темной точки), что позволяет более точно идентифицировать местоположение дефектного участка, обнаруженного мобильным средством, путем сопоставления дефектограмм. При контроле сварных стыков и отдельных сечений рельсов, возможно, более достоверно оценить наличие дефекта в изделии даже при наличии мешающих отражений и шумов.
11.7.3. Мобильные средства дефектоскопии
Мобильные средства дефектоскопии автомотрисы, вагоны автомобили на комбинированном ходу производят контроль рельсов на скорости до 70 км/ч.
Автомотриса дефектоскопная предназначена для сплошного контроля головки, шейки и ее проекции на подошву рельсов при скорости 5-40 км/ч и температуре окружающей среды от –30 до +40°С в совмещенном режиме с использованием эхо-импульсного и зеркально-теневого метода контроля при контактном способе ввода ультразвуковых колебаний и магнитно-динамического метода контроля и до 70 км/ч при магнитном контроле. Контакт обеспечивается путем подачи воды под систему, при отрицательных температурах вода и система подогреваются.
Рис. 11.31. Автомотриса дефектоскопная АДЭ-1МТ:
1 – бегунковая тележка; 2 – следящая лыжа; 3 – преобразователи (искатели) ультразвуковые; 4 – система подачи воды;
5 – аккумуляторы; 6 – приводная тележка; 7 – антенна радиосвязи; 8 – пульт управления автомотрисой; 9 – кресло;
10 – компьютер и дефектоскопная аппаратура; 11 – кухня; 12 – мастерская; 13 – бак с водой; 14 – дизель-генератор
Конструктивное исполнение автомотрисы показано на pис. 11.31. Следящая система 2 обеспечивает проход «мертвого» пространства крестовин стрелочных переводов в рабочем положении до 40 км/ч, в транспортном положении – до 80 км/ч. Максимальный габарит следящей системы не выходит, за пределы тени гребней колесных пар.
Рис. 11.32. Схема прозвучивания рельсов аппаратным комплексом автомотрис:
1 и 2 – пьезопреобразователи (резонаторы) – ПЭП; ЭМ – эхо-метод; ЗТМ – зеркально-теневой метод
Конструкция искательной лыжи обеспечивает крепление блоков ПЭП, реализующих схему прозвучивания для выявления дефектов (рис. 11.32), слежение за рабочей поверхностью рельса во всех диапазонах допустимого износа и подуклонки, и имеет подвод контактирующей жидкости (воды) и размещение искателя магнитного контроля. Зимой вода подогревается.
С типового датчика, связанного с колесной парой, на вход блока синхронизации дефектоскопа «ЭХО-КОМПЛЕКС» поступают импульсы синхронизации, скважность и частота которых линейно зависят от скорости движения. Импульсы синхронизации запускают генераторы, вырабатывающие импульсы напряжения высокой частоты – зондирующие импульсы, которые преобразуются пьезоэлектрическими преобразователями в импульсы УЗК и излучаются при движении автомотрисы в рельсы левой и правой нити железнодорожного пути.
Импульсы УЗК, отраженные от различных неоднородностей в металле рельса (дефекты, стыки, болтовые отверстия и т. п.) или от подошвы рельса, преобразуются этими же преобразователями в электрические импульсы, усиливаются и подаются на дальнейшую обработку и регистрацию в регистрирующий комплекс «КРУЗ-М».
Автомотриса оснащена намагничивающей рельсы системой из двух электромагнитов на осях неприводной тележки и магнитной лыжей, на которую устанавливается искательное устройство в виде индукционной катушки, реагирующей на изменения магнитного поля рельсом.
Магнитный метод является скоростным методом дефектоскопии рельсов в пути. Максимальная рабочая скорость его при существующей конструкции и параметрах дефектоскопной аппаратуры – 70 км/ч. Дефектоскоп при этом выявляет внутренние поперечные трещины, поражающие свыше 25% площади сечения головки и залегающие на глубине 5-6 мм от поверхности катания, а также продольные горизонтальные и вертикальные трещины, как выходящие на поверхность, так и внутренние, расположенные на глубине до 4-5 мм от поверхностей катания. Не выявляются дефекты в болтовых стыках в пределах металлических накладок, в шейке и подошве рельсов и в сварных стыках, за исключением сильно развитых поперечных трещин усталостного характера. Магнитный способ определения дефектов применяется на участках, где затруднена работа ультразвуковых средств контроля из-за отсутствия акустического контакта и при низких отрицательных температурах.
Рис. 11.33. Магнитный дефектоскоп:
а – блок-схема; б – лыжа с искательной катушкой:
1 – параллельная связь; 2 – ось; 3 – лыжа; 4 – корпус
Принцип действия магнито-динамической системы контроля представлен на рисунке 11.33, а. При намагничивании рельсов в движении постоянным магнитным полем в них возникают вихревые токи и дефекты выявляются при одновременном действии двух физических факторов: изменения намагниченности (магнитного потока) в зоне дефекта и плотности вихревых токов, обтекающих трещину. На поверхности рельса в зоне дефекта появляется местное изменение магнитодинамического поля, которое называется магнитодинамическим полем дефекта. Дефектоскоп (вагон или автомотриса) оснащен искательным устройством индукционного типа в виде одиночной катушки, реагирующей на изменение продольной составляющей магнитного поля над рельсом. При движении в искателе наводится э.д.с. в виде отдельных импульсов (сигналов), которые имеют различные значения, длительность и форму. Осциллограммы расшифровывают при визуальном просмотре; разделяют их по некоторым характерным признакам формы на сигналы от дефектов и от поверхностных повреждений, определяют путевые координаты дефектов.
Постоянный электрический ток, проходя по обмоткам, создает в сердечниках постоянный магнитный поток:
 (11.20)
(11.20)
где IH – ток в электромагните; w – число витков в катушке; RM – магнитное сопротивление цепи (сердечников, воздушных зазоров, межполюсного участка рельса).
Искательное устройство дефектоскопа (рис. 11.33, б) состоит из индукционной катушки и лыжи, при помощи которой катушка ставится на поверхность катания головки и перемещается вдоль рельса. Индукционная катушка вставляется в корпус 4, укрепленный в лыже 3. Одним концом лыжа крепится на оси 2, закрепленной в параллельных связях 1.
Для обработки и регистрации сигналов от дефектов автомотрисы и вагоны оборудованы аппаратно-программными комплексом на базе ПЭВМ, который предназначен для снятия сигнала с магнитных датчиков и сохранения его на магнитном носителе в цифровом виде.
Комплекс обеспечивает: контроль поступающего сигнала на мониторе; автоматический подсчет координаты (компьютерный отметчик) с возможностью коррекции; просмотр сигналов от дефектов в любом масштабе (увеличение); автоматический поиск сомнительных мест; введение базы данных по найденным дефектам и архива по всем проездам вагона-дефектоскопа.
Следящая система, являющаяся составной частью автомотрисы, обеспечивает центрирование преобразователей по оси симметрии рельса, слежение за поверхностью рельса, а также перемещение ультразвуковых преобразователей и приемной индукционной катушки по прямым и кривым участкам пути и стрелочным переводам.
Всего в дефектоскопе автомотрисы формируется двенадцать каналов (десять ультразвуковых и два магнитных), подключаемых к персональным компьютерам.
Другим видом мобильных средств дефектоскопии являются совмещенные вагоны-дефектоскопы дорожного подчинения. Вагоны одновременно используют магнитный и ультразвуковой принципы контроля рельсов, что позволяет существенно повысить качество контроля и обеспечить выявление практически всех опасных дефектов в рельсах во всем диапазоне температур их эксплуатации (за исключением перьев подошвы) при скоростях до 65 км/ч.
Современные модификации совмещенных дефектоскопов ВД-1МТ и ВД-1МТ 5К изготавливаются на базе пассажирских вагонов производства ОАО «Тверской вагоностроительный завод». Внутри вагон разделен на бытовую часть (купе, кухня, санузел и т.д.) и операторную часть с рабочими местами операторов, осуществляющих управление измерительным комплексом. Вагон имеет измерительную тележку, расположенную под пролетной частью кузова. Оборудование тележки – искатели с установленными на них ПЭП входят в состав ультразвукового дефектоскопа «ЭХО-КОМПЛЕКС» с регистрирующим комплексом «КРУЗ-М». Кроме того, тележка оборудуется намагничивающей системой, индуцирующей при движении вагона вихревые токи в рельсах, и индуктивными датчиками. В качестве намагничивающей системы используются катушки электромагнитов, которые через подшипниковые узлы устанавливаются на осях колесных пар. Для исключения проворачивания корпуса катушек соединяются с рамой тележки реактивными тягами.
Вагоны-дефектоскопы ВД-1МТ 5К начали оснащаться универсальным интеллектуальным дефектоскопом «Синтез». Дефектоскоп оснащен новым аппаратно-программным комплексом, который позволяет производить автоматическую расшифровку результатов проезда, хранить результаты измерения в единой базе данных, отображать полную А-развертку по всем каналам в режиме реального времени. Кроме того, система позволяет в режиме реального времени отображать данные, полученные другими системами диагностики пути и сохранять их в режиме реального времени.
Рис. 11.34. Тележка универсального интеллектуального дефектоскопа «Синтез» на базе вагона-дефектоскопа ВД-1МТ 5К:
1 – кузов вагона; 2 – соединительные трубы; кронштейны: 3 – крепления тяг, 9 – крепления рамы и 12 – ходовых тележек с буксами;
4 – механизмы фиксации тележки в транспортном положении; пружины подвешивания: 5 – ходовых тележек и 16 – лыж;
пневмоцилиндры подъема и опускания: 6 – ходовых тележек и 19 – лыж; 7 – страховочные цепи; 8 – рама: 10 – тяги параллелограммных механизмов; 11 – одноосные ходовые тележки; шарнирные узлы: 13 – вертикальный и 20 – горизонтальный;
14 – продольные балки (левая и правая) 15 – вертикальные направляющие лыжи; 17 – планки подвеса лыж; 18 – лыжа с блоками искателей
Дефектоскопная тележка (рис. 11.34) монтируется на раме 8, прикрепленной через кронштейны 9 к нижним балкам кузова 1 вагона. Тележка содержит две одноосных ходовых тележки 11, которые подвешены на раме 8 через пневмоцилиндры 6 их подъема и опускания и пружины 5, которые находятся в растянутом состоянии и способствуют быстрому подъему тележки в транспортное положение при возникновении аварийных ситуаций. Параллелограммные механизмы с тягами 10 позволяют одноосным тележкам перемещаться по неровностям пути с рабочей скоростью вагона-дефектоскопа. Цепи 7 служат для исключения проваливания тележек в пространство между рельсами в случае их схода, что обеспечивает необходимый уровень безопасности движения.
Через кронштейны 12 и шарнирные узлы 13 и 20 на одноосные ходовые тележки жестко опираются правая и левая продольные балки 14 с размещенным на них дефектоскопным оборудованием и системой подачи воды к блокам искателей. Лыжи 18 подвешиваются через пружинные устройства 16 и вертикальные направляющие 15 на продольных планках 17. При опущенной на рельсы тележке лыжи опускаются пневмоцилиндрами 19. При движении вода подается непосредственно под контактные поверхности блоков искателей, а лыжи 18 не касаются рельсов, что способствует уменьшению их износа. Применение чувствительной системы магнитных датчиков и совершенной системы обработки сигналов позволило использовать остаточное намагничивание тележки без применения электромагнитов. Основные технические характеристики мобильных средств скоростного контроля рельсов приведены в табл.11.4.
11.8. Средства диагностики земляного полотна
Земляное полотно воспринимает и распределяет нагрузки от подвижного состава на поверхность основания пути. После отсыпки и послойного уплотнения оно характеризуется определенной внутренней структурой, которая изменяется при эксплуатации и ремонтах. Структурные изменения вызывают изменение картины распределения передаваемых нагрузок, возникновение зон нестабильного состояния с концентрацией внутренних напряжений, которые могут спровоцировать остаточные деформации и даже разрушение элементов земляного полотна. Деформации земляного полотна приводят к появлению расстройств рельсовой колеи, прежде всего, возникают просадки. Для предупреждения отмеченных отрицательных последствий в путевом хозяйстве железных дорог проводится мониторинг состояния земляного полотна с использованием различных методов и технических средств диагностики.
Прежде всего, осуществляется прямой метод отбора проб грунта (кернов) путем бурения скважин на глубину до 25 м. Такими буровыми устройствами оснащаются комплексы для инженерно-геологического обследования земляного полотна на базе специально оборудованного вагона (ВИГО). Отбор проб позволяет точно определить геологическое строение полотна в локализованном месте, однако, это трудоемкий метод, связанный с нарушением литологической структуры.
Для глобального обследования массива земляного полотна широко используются методы и технические средства, позволяющие по косвенным признакам оценивать его литологическую структуру и даже при использовании ЭВМ составлять его визуальные модели в трехмерном виртуальном пространстве.
Плотность массива грунта исследуется сейсмическим методом по измерению скорости прохождения упругой волны от источника до сейсмодатчика. При таком методе возможны измерения только поверхностных слоев грунта в локализованных зонах. Массовые и оперативные исследования затруднены.
В практике мониторинга земляного полотна на всем протяжении пути активно используются георадары, реализующие радиолокационный метод оперативного исследования внутренней структуры балластной призмы и земляного полотна. Радиолокационный метод основан на изучении параметров коротких высокочастотных электромагнитных импульсов, образующихся в грунте с помощью высокочастотного генератора и принимаемых на его поверхности. По параметрам импульсов (скорость распространения V и коэффициент поглощения) определяют геологические характеристики среды: форму и глубину залегания отражающих частиц, вид и состояние грунтов.
Радиолокационный метод реализован в многоканальном георадарном комплексе ОКО-2 разработанном НПЦ «Геотех» (Москва), который может устанавливаться на компьютеризированных вагонах-лабораториях, дрезинах и тележках. Комплекс состоит из блока управления, который может работать с персональным компьютером типа Notebook, антенного блока и блока питания. Для исключения влияния внешних радиопомех антенный блок делается экранированным сверху и с боковых сторон («рупор»). Антенны позволяют излучать импульсные радиосигналы 400 МГц, 1000 МГц и 1700 МГц и принимать отраженные от объектов структуры земляного полотна (слоев грунта различной плотности и влажности) или от других объектов (трубопроводы, шпалы, куски рельсов и т.д.) внутри полотна. Антенные блоки меньшей частоты позволяют проводить обследования на большую глубину до 3 м, а при большей частоте обеспечивается более детальное исследование. Разрешающая способность до 3 см. Скорость движения транс-портного средства до 120 км/ч при скорости сканирования до 300 трасс/с. Результаты измерений отражаются в виде радарограмм, позволяющих определять литологическую структуру вдоль пути под каждым антенным блоком.
Группой компаний СВЕМА разработана аналогичная автоматизированная система георадиолокации земляного полотна «ГЕОСКАНЕР», позволяющая при установке на транспортное средство производить георадиолокацию на глубину до 4 м со скоростью движения до 60 км/ч. Представление результатов исследований аналогично. Такой системой, например, оснащается диагностический комплекс «Интеграл».
На сети ОАО «РЖД» действует система регулярного контроля геометрического положения рельсовой колеи с помощью вагонов-путеизмерителй. Просадки пути под нагрузкой появляются вследствие деформаций балластной призмы и земляного полотна. Существует устойчивая корреляционная связь между этими деформациями. В МГУПС (ранее МИИТ) разработана методика оценки состояния земляного полотна по данным измерений вагона-путеизмерителя на основе анализа спектральной плотности просадок вдоль пути. В последние годы для диагностики деформативности земляного полотна раз-рабатывается метод оценки качества основания пути с помощью передвижных нагрузочных комплексов (ПНК). Метод основан на непрерывном вдоль пути измерении упругих осадок рельсов под заданной нагрузкой. В качестве показателя упругой осадки подрельсового основания пути принята линейная доля упругой осадки рельса Yp, соответствующего осевой нагрузке 30 тс и полученная по разности осадок под двумя различными нагрузками:
 (11.21)
(11.21)
где Y1 и Y2 – осадки рельса при нагрузках на ось соответственно P1= 10 тс и Р2=30 тс.
Критериями для выделения участков служит показатель расчетной осадки под нагрузкой 30 тс/ось, определяемый по пикетно по формуле:
 (11.22)
(11.22)
где Yср. – среднее значение; σ – значение СКО (среднее квадратичное отклонение) осадки в мм на длине пикета (100 м). Пороговые значения расчетной осадки для допустимых скоростей движения пассажирских поездов приведены в табл. 11.5.
Допустимые параметры осадки пути для различных скоростей движения пассажирских поездов. Таблица 11.5
| Скорость, км/ч | 250 | 200 | 160 | 140 |
| Значения расчетной осадки, мм | , 0 | , 4 | 3,8 | 4,0 |
| Значения СКО осадки, мм | , 2 | , 25 | 0,3 | 0,35 |
В настоящее время на железных дорогах России в опытном порядке используются различные конструкции передвижных нагрузочных комплексов (НПК):
– конструкции научно-производственной фирмы (НПФ) «Спецмаш» (Санкт-Петербург) под названием лаборатория инженерно-геологического обследования ЛИТО СМ-460, СПМ-18, СПМ-24;
– конструкция отделения комплексных испытаний ВНИИЖТа.
Принципиальное различие между двумя конструкциями НПК состоит в характере нагружения рельсовых нитей. В передвижном нагрузочном комплексе «Спецмаш» нагружение производится от специальной оси, а НПК ВНИИЖТа состоит из трех вагонов, имитирующих нагрузку от подвижного состава. Для исследования состояния земляного полотна используются специальные нагрузочные комплексы, в состав которых входит оборудование для создания вертикальной статической нагрузки на путь, измерения возникающих при этом упругих просадок и оборудование для записи и обработки результатов измерений на базе специализированного аппаратно-программного комплекса.
Рис. 11.35. Диагностический комплекс НДК-10/30 (СМП-24):
1 – жилая зона; 2 – измерительные каретки; 3 – устройства нагружения; 4 – нагрузочные колеса;
5 – операторская; 6 – дизельэлектрическая станция; 7 – насосная станция; 8 – контрольная аппаратура;
9 – электрооборудование; 10 – балластный груз
Например, нагрузочный комплекс НДК-10/30 (СМП-24) состоит из двух сцепленных восьмиосных вагонов (рис. 11.35). В средних частях вагонов расположены нагрузочные устройства, одно из которых рассчитано на усилие 10 тс, а другое – 30 тс. Нагрузочное устройство включает два колеса, контактирующих с правой и левой рельсовыми нитями. Колеса нагружаются независимо друг от друга. В зоне расположения колес опускается измерительная каретка с датчиками просадок рельсов, имеющая базу 6,4 м. Измерения усилий и просадок производятся при скорости движения комплекса 4-7 км/ч.
В соответствии с исследованиями ВНИИЖТ эти методы позволяют оценить состояние только верхней части подрельсового основания в рабочей зоне на глубине 3-4 м от уровня основной площадки. Для откосов насыпей и участков земляного полотна в сложных инженерно-геологических условиях следует использовать радиолокационный (до глубины 2-3 м) и сейсмический методы. Рациональные комплексы методов диагностики земляного полотна приведены в табл. 11.6.
В настоящее время формируется единая компьютеризированная система использования диагностических средств, позволяющая объективно оценивать состояние пути в совокупности всех факторов, влияющих на стабильность его параметров, прогнозировать их изменение, своевременно планировать проведение путевых работ.
11.9. Автоматизированная система диагностики пути
Основная цель диагностики пути – это организация и осуществление систематического надзора за состоянием пути и его элементов причем, для каждого элемента и устройства железнодорожного пути, необходимо обеспечить контроль за его эксплуатационным состоянием и точным выполнением своих функций. Диагностика пути должна осуществляться с достаточной степенью надежности и с необходимой периодичностью, чтобы обеспечить безопасность движения поездов и бесперебойную работу железнодорожного пути. Кроме того, она должна стать основой для оптимального планирования ремонтов и текущего содержания пути по его фактическому состоянию с целью экономии затрат.
11.9.1. Единая технология паспортизации геометрии рельсовой колеи
и управления машинной выправкой пути по данным вагонов-путеизмерителей
На российских железных дорогах задача эффективности и точности выправки пути решается использованием «Автоматизированной системы высокоточной выправки пути «Навигатор», системой МС ВНИИЖТ и др.
В условиях роста грузонапряженности, увеличения скоростей движения поездов их веса и длины становится актуальной задача определения исходных параметров, расстроенных в процессе эксплуатации участков пути, соответствующих правильному их геометрическому очертанию при минимально необходимых смещениях оси существующего пути (так называемые паспортные значения) с целью повышения точности и производительности машинной выправки пути.
Сотрудниками ЗСЖД и НИЦ «Путеец», ВНИИЖТ разработана единая технология паспортизации геометрии рельсовой колеи и управления машиной выправки по данным вагонов-путеизмерителей. Установлено, что для использования геометрической информации вагонов-путеизмерителей необходима электронная путевая разметка, повторяющая существующий визуальный пикетаж, так как показания вагонов-путеизмерителей недостаточно точно привязаны к координатам пути.

Рис. 11.36. Электронная разметка пути:
электронная метка – (а); установка метки на шпале, методом засверливания – (б)
Электронная метка представляет собой цилиндр толщиной 8 мм и диаметром 65 мм с встроенной в нее платой с микросхемой (рис. 11.36). На микросхеме хранится индификационный номер метки позволяющий определить ее точное местоположение – дорога, перегон, путь, километр и т.д. Установка меток осуществляется двумя способами: просверливание отверстие и вклеивание электронной метки в средней части железобетонной шпалы напротив пикетного знака.
Для синхронизации геометрической информации вагонов-путеизмерителей и программных значений для выпровочных машин производится их оборудование сканерами путевой разметки.
Сканер путевой разметки состоит из следующих блоков:
– контроллер обеспечивает формирование сканирующих запросов для активизации метки, прием и декодирование данных поступающих из метки, кодирование и отправка данных в метку, управление мощностью приемо-передатчика, привязка метки к положению на пути (мерное колесо), а также по времени;
– радиочастотный приемо-передатчик обеспечивающий прием-передачу радиочастотного сигнала между меткой и кон-троллером;
– антенна обеспечивающая согласованную передачу мощного радиосигнала, а также регистрацию сигнала от метки.
Рис. 11.37. Установка радара на путевых машинах:
а) – на вагоне-путеизмерителе; б) – на машине Дуоматик 09-32
Оборудование вагонов-путеизмерителей и ВПР-машин сканерами электронной путевой разметки обозначено на рис. 11.37.
Программа, устанавливаемая на персональный компьютер ВПИ обеспечивает взаимодействие с аппаратными средствами для считывания информации об электронной путевой разметки, настройку и диагностику сканера и антенны на ВПИ, синхронизацию момента получения метки с общим потоком геометрической информации ВПИ. Программа работает в автоматическом режиме и не требует вмешательства оператора.
Программа, устанавливаемая на бортовой компьютер ВПР-машин, обеспечивает взаимодействие в режиме выправки с аппаратными средствами считывания информации об электронной путевой разметки, настройку и диагностику сканера и антенны на машине, выбор стартовой позиции выправки пути по электронной путевой разметки.
По результатам расчетов строятся программные задания управления машинной выправкой пути в плане, по уровню и в продольном профиле, с шагом 0,625 м:
– проектные стрелы изгиба рабочего стрелографа путевой машины, построенные по параметрам проектной кривизны пути в плане;
– расчетные сдвиги пути;
– проектные стрелы изгиба в вертикальной плоскости нивелировочных ходов левой и правой рельсовой нити, построенные по параметрам проектной кривизны пути в профиле;
– расчетные подъемки левого и правого рельса;
– проектное возвышение наружного рельса.
Программное задание обновляется по мере прохода вагонов-путеизмерителей (два раза в месяц). Проектные задания в них постоянны, а расчетные значения перемещений пути корректируются с учетом появившихся расстройств.
Перегонные программные задания находятся в СБД-П дороги и доступны в любой период времени.
Машинная выправка одновременно в плане, профиле и по уровню осуществляется под управлением перегонных программных заданий. Привязка стартовой позиции производится по электронной разметки пути. Путевая машина, оборудованная сканером, осуществляет поиск меток в автоматическом режиме. После успешного выбора стартовой позиции программное задание подготавливается к выправке с учетом параметров машины (КИС, положение машины и т.д.).
Путевая машина с настроенной КИС начинает работу со стартовой позиции при этом процесс выправки отражается на экране компьютера, где выводятся цифровые значения графиков и показания индикаторных приборов кроме того, на экран выводится зафиксированные электронные метки, которые используются для автоматической коррекции программного задания по длине пути.
Системы высокоточной выправки пути «ВПИ Навигатор», МС ВНИИЖТ позволяют значительно повысить производительность выправочных машин, так как необходимую информацию о состоянии пути получает от ВПИ без предварительной измерительной поездки, при этом производительность машины типа Доуматик увеличивается на 15-25%, а ВПР до 60-88%, что особенно актуально при незначительной продолжительности «окна».
11.9.2. Система сбора, обработки и хранения информации
о местонахождении удаленных подвижных объектов путевого хозяйства
В 2007 году начаты работы по широкому внедрению системы сбора, обработки и хранения информации о местонахождении удаленных подвижных объектов путевого хозяйства, предназначенных для оперативного контроля местоположения объектов железнодорожного транспорта – вагонов, ССПС, автомобилей и решения задач на основе информации о состоянии технических параметров контролируемых объектов.
Система обеспечивает:
– определение местоположения транспортных средств на электронной карте в режиме реального времени;
– контроль прохождения установленных точек в заданный период времени;
– отображение местоположения и маршрутов движения за любой промежуток времени на карте на экране монитора;
– формирование отчетов о движении и стоянках транспорта за любой период наблюдения;
– формирование графиков скорости движения транспорта за любой период наблюдения;
– связь диспетчера с экипажем подвижного объекта;
– хранение полученной информации в базе данных.
Область применения – диспетчерское управление вагонами дефектоскопами, вагонами путеизмерителями, мотриссами различного назначения, путевыми машинами и автотранспортом путевого хозяйства.
Оборудование Системы включает в себя сервер приложений, сервер обмена, компьютеры – оборудование АРМ диспетчеров, абонентский навигационно-связной терминал. В дальнейшем на подвижных объектах планируется установить бортовой миникомпьютер (БК).
В качестве транспортной и навигационной среды используются сети GSM, Internet, МГТС и спутниковая навигационная система GPS NAVSTAR (США), ГЛОНАСС (Россия).
На сервере приложений формируется база данных, в которую заводятся данные обо всех объектах, управляемых Системой. В режиме реального времени сервер обрабатывает данные, поступающие с подвижных и стационарных объектов. Сервер совместно с клиентской частью АРМ-ов поддерживает в рабочем режиме географическую карту, на которой отражаются трассы передвижения контролируемых объектов – вагонов, мотрисс.
В настоящее время развитие средств диагностики идет за рубежом и в России по пути создания мобильных диагностиче-ских комплексов.
В Италии создан диагностический комплекс «Архимед». Поезд Архимед обладает следующими основными свойствами:
– способностью измерять геометрические характеристики пути, качественное состояние пути, параметры контактной сети, техническое состояние систем сигнализации и телекоммуникаций;
– рабочей скоростью движения 200-220 км/ч;
– возможностью измерений на линиях электрифицирован-ных на переменном токе напряжением 25 кВ, 50 Гц и на постоянном токе напряжением 3 кВ.
Применение путеизмерительного поезда на высокоскоростных линиях обеспечивает стабильность и безопасность движения поездов.

Рис.11. 38. Автоматизированный диагностический комплекс
технических объектов железнодорожной инфраструктуры (АДК-И)
В России созданы опытные образцы диагностических комплексов для контроля технических объектов инфраструктуры «Интеграл» фирмы «Группа компаний «Твема» и АДК-И фирмы НПЦ «Инфотранс» (рис 11.38).
Использование множества подсистем контроля в рамках одного диагностического поезда позволяет получить значимые преимущества при проведении плановых проверок состояния объектов транспортной инфраструктуры.
Оборудование диагностических комплексов спроектировано с учетом растущих требований к качеству и скорости контроля объектов инфраструктуры. Большая часть систем комплексов не имеют в своем составе механических датчиков, что снимает ограничение на рабочую скорость подвижной единицы диагностического комплекса.
В настоящий момент оборудование комплексов базируется на пассажирских вагонах, конструктивная скорость которых составляет до 160км/ч, но обеспечивают работоспособность аппаратно-программного комплекса до 250 км/ч..
В комплексе АДК-И «Интеграл» решаются задачи получения данных о состоянии объектов инфраструктуры приближенных к поезду «Архимед».
11.9.3. Разработка автоматизированной система диагностики пути
Источником объективной информации о текущем состоянии пути в современных условиях становятся компьютеризированные средства его диагностики. Параллельно с внедрением новых средств диагностики, актуальнейшей задачей для путевого хозяйства является разработка и внедрение комплексной автоматизированной системы диагностики пути (АСДП). Основная задача АСДП – обеспечивать концентрацию в автоматизированном режиме поступающей от различных средств диагностики информации о состоянии пути, выполнять ее обработку в путейских подразделениях в необходимых объемах, решать проблемы взаимообмена результатами измерений и выполнения объективных комплексных анализов состояния железнодорожного пути.
Рис. 11.39. Автоматизированная система диагностики пути АСДП
На рис.11.39 представлена укрупненная схема автоматизированной комплексной системы диагностики пути. Она может быть разделена на три группы задач.
Первым начальным звеном системы диагностики пути является контроль и управление работой самих диагностических средств, их оснащенностью и техническим состоянием.
Первая часть системы диагностики – позволяет сформировать банк данных о наличии, техническом состоянии и управлении работой средств диагностики пути и включает в себя подсистемы, связанные с учетом наличия, планированием и учетом работы, автоматизированным контролем выполнения плана работы, анализом использования, планированием ремонтов и технических обслуживаний с учетом неисправностей и причин простоев путеизмерительных средств и средств дефектоскопии на уровнях дистанций и служб пути.
Вторая часть АСДП – это группа задач по обеспечению реализации функций приема, накопления и хранения измерительной информации, а также обработки информации и получения выходных ведомостей по каждому средству диагностики. Она позволяет сформировать банк данных измерительной информации о состоянии железнодорожного пути и его элементов по результатам контроля всеми средствами диагностики, который является ядром всей системы и основой для последующей комплексной обработки.
Третья часть системы – наиболее важная и интегральная по отношению к первым двум – это группа комплексных аналитических задач.
Каждое из средств диагностики пути выполняет, как правило, целый ряд различных уникальных функций, позволяющих контролировать параметры технического состояния отдельных объектов и элементов железнодорожного пути.
Но наибольшую ценность имеет комплексная оценка и анализ состояния железнодорожного пути по результатам кон-троля всеми средствами диагностики и, как следствие, планирование ремонтных работ по фактическому состоянию пути и его элементов.
Внедрение системы на всех железных дорогах позволяет сформировать банк данных по диагностике для уровня ЦП ОАО «РЖД», что даст возможность доступа к достоверной информации о работе всего парка средств диагностики пути и о фактическом состоянии пути по комплексным результатам контроля руководителям высшего уровня управления путевым хозяйством.
ГЛАВА 12
МАШИНЫ ДЛЯ ОЧИСТКИ ПУТИ ОТ СНЕГА
Большая часть сети железных дорог России находится в зоне умеренного и холодного климата с выпадением осадков в виде снега, поэтому своевременная очистка путей от снега имеет большое значение для нормального функционирования транспорта в холодное время года. Степень покрытия участка пути снегом зависит от количества приносимого к пути снега, поперечного профиля земляного полотна и естественных (лесополосы) или искусственных (снеговые щиты) преград для переноса снега. Путь, расположенный на насыпи, высота которой больше толщины снежного покрова, как правило, не заносится снегом, а путь в выемках глубиной более 0,4 м подвержен сильным заносам.
Для очистки путей от снега на перегонах и станциях используются плужные и роторные снегоочистители, снегоуборочные машины и стационарные устройства для обдува или обогрева стрелок на станциях.
12.1. Плужные снегоочистители (классификация, устройство, принцип действия)
Рис. 12.1. Схемы очистки пути от снега плужным рабочим органом:
однопутная двухотвальная (а) и двухпутная одноотвальная (б)
Эти снегоочистители, ввиду несложного конструктивного устройства и минимальных затрат на эксплуатацию, наиболее распространены на сети. В эксплуатации находятся снегоочистители СДП, СДПМ, СДПМ-2 и СПУ-Н [36]. Рабочий орган такой машины представляет собой отвальный плуг, состоящий из системы переставляемых крыльев и неподвижных щитов-отвалов. При движении снегоочистителя плуг подрезает слой снега и отбрасывает его в сторону от пути. По характеру отбрасывания снега плужные снегоочистители бывают (рис. 12.1) однопутные или двухотвальные (а), двухпутные или одноотвальные (б) и универсальные с системой перестановки отвалов на работу по схеме а или б, в зависимости от конкретных условий работы. Например, на двухпутном участке сбрасывание снега с пути производится в полевую сторону.
Рис. 12.2. Двухпутный плужный снегоочиститель СДПМ-2:
1 – подрезной нож; 2 и 5 – угловое и боковое крылья; 3 – ходовая тележка типа 18-100;
4 – корпус; 6 – лобовой щит; 7 – выдвижная автосцепка; 8 – прожектор
Двухпутный снегоочиститель СДПМ-2 (рис. 12.2) представляет собой специальный четырехосный вагон 4 утяжеленной конструкции, позволяющий сохранять устойчивость при пробивке снежных завалов. Вагон опирается на типовые двухосные тележки 3, имеет тормозную систему, автосцепки 7 и систему сигнализации, что позволяет снегоочиститель прицеплять к локомотиву или транспортировать в составе грузового поезда. Спереди и сзади снегоочистителя установлены плужные снегоочистительные устройства, включающие лобовой щит 6 с подрезным ножом 1, боковое 5 и угловое 2 крылья. В транспортном положении крылья повернуты на кронштейнах вдоль машины, подняты и закреплены транспортными стяжками. Поднят и закреплен стяжками также подрезной нож 1. Автосцепки 7 выдвинуты и зафиксированы. При работе с одной стороны прицепляется локомотив, снегоочистительное устройство остается в транспортном положении, а противоположное устройство приводится в рабочее положение. В рабочем положении боковое и угловое крыло поворачиваются под углом к направлению движения пневмоцилиндрами через рычажные механизмы, одновременно опускаясь. Опускается пневмоцилиндрами также подрезной нож. При работе на двух-путном участке, если движение поездов по соседнему пути не закрывается, то по условиям безопасности, угловое крыло 2 остается в транспортном положении и закреплено.
Рис. 12.3. Угловое крыло:
1 –шарнирный узел крепления тяги и крыла; 2 – подкрылок с ножом; 3 и 10 – тяги; 4 – основная часть крыла; 5 – двуплечий рычаг;
6 и 11 – универсальные шарнирные узлы; 7 – поворотный каркас; 9 – козырек; 9 и 13 – кронштейны; 14 – распорка
Угловое крыло (рис. 12.3) монтируется на поворотном каркасе 7, закрепленным через кронштейны 9 и 13 с вертикальными шарнирами на раме 12 машины. Каркас поворачивается в плане при приведении крыла в рабочее или транспортное положение. Крыло включает основную часть 4 с подкрылком 2, установленную в вертикальных направляющих на каркасе 7, и козырек 8. На каркасе шарнирно установлен двуплечий рычаг 5, верхнее плечо которого через тягу 10 и универсальные шарниры 6 и 11 соединено с рамой машины, а нижнее плечо через тягу 3 и палец 1 соединено с основной частью крыла. При поворотах каркаса 7 в плане через эту рычажную передачу крыло опускается в рабочее положение или поднимается в транспортное положение. Козырек 8 соединен с основной частью крыла шарнирами, а с каркасом 7 – через распорку 14 и шарниры. При повороте крыла в транспортное положение козырек поворачивается вертикально в пределы габарита подвижного состава. Удары при поворотах крыла амортизируются резиновыми упорами, установленными на раме. Для эффективного подъема и отбрасывания снега рабочая поверхность крыла с подкрылком и козырьком образуют ломаную линию, приближающуюся к криволинейной поверхности.
Рис. 12.4. Боковое крыло:
1 – шарнирный узел крепления тяги и крыла; 2 – подкрылок с ножом; 3 и 7 – кронштейны; 4 и 9 – тяги; 5 – основная часть крыла;
6 – двуплечий рычаг; 8 – козырек; 10 и 13 – универсальные шарнирные узлы; 11 – поворотный каркас; 12 – рама; 14 – распорка
Аналогичную конструкцию имеет и боковое крыло (рис. 12.4).
Рис. 12.5. Механизм привода подрезного ножа:
1 – подрезной нож; 2 – шарнирный узел; 3 – лобовой щит;
4 – пневмоцилиндр; 5 – рама; 6 – кронштейн; 7 – противовес
В нижней части лобового щита 3 (рис. 12.5) через оси поворота 2 и кронштейны 4 установлен подрезной нож 1. В рабочем положении подрезной нож позволяет произвести зачистку снега ниже УВГР на 50 мм и очистку верхней рабочей поверхности рельса тросовыми щетками, установленными в проемах ножа. Приведение ножа в рабочее или транспортное положение осуществляется пневмоцилиндрами 4. Для ускоренного подъема ножа при проезде препятствий во время работы он снабжен противовесами 7.
Рис. 12.6. Выдвижная автосцепка:
1 – автосцепка СА-3 с поглощающим аппаратом; 2 – выдвижная балка автосцепки;
3 – механизм подъема и опускания фиксатора; 4 – фиксатор; 5 – пневмоцилиндр
Снегоочиститель оборудован двумя выдвижными автосцепками 1 с поглощающим аппаратом (рис. 12.6), которые устанавливаются на выдвижной балке 2. При работе снегоочистителя балка 2 перемещается по направляющим пневматическим цилиндром 5. Отверстие в лобовом щите закрывается листом. В транспортном положении, после снятия листа, автосцепка выдвигается и дополнительно закрепляется фиксатором 4, перемещаемым вертикально винтовым механизмом 3 с ручным приводом. Положение автосцепки контролируется дополнительно по сигнальным лампам на пультах управление снегоочистителя.
Рис. 12.7. Принципиальная схема рабочей пневмосистемы снегоочистителя:
Ц1-Ц5 – пневмоцилиндры привода переднего плуга; Р1-Р4 – крановые пневмораспределители; ВН1 – кран подачи звукового сигнала;
ВН2 и ВН8 – разобщительные краны; ВН3-ВН7 – продувочные краны ресиверов; РС1-РС4 – воздушные резервуары (ресиверы);
ТФ1 – тифон; МН1 – манометр; КР1 и КР2 – клапаны максимального давления, КО1 – обратный клапан
Привод рабочего оборудования – пневматический с подачей воздуха через разобщительный кран ВН8 от тормозной системы (рис. 12.7) через клапаны максимального давления РД1 и РД2. Эти клапаны гарантируют поддержание давления в рабочей пневмосистеме на постоянном уровне 0,6 – 0,65 МПа, обеспечивая движения элементов рабочего оборудования в нормальном режиме. Воздушные резервуары (ресиверы) РС1 – РС4 способствуют более плавному изменению давления в пневмосистеме и гарантируют приведение рабочего оборудования в транспортное положение в случае отказа основной системы подачи воздуха. Расчетное усилие на пневмоцилиндрах раскрытия крыльев выбирается таким образом, чтобы при достижении предельной нагрузки на крыле оно отжималось. Этим самым обеспечивается устой-чивость снегоочистителя при работе.
Помимо плужных снегоочистителей (см. табл. 12.1) на базе специального вагона, применяются навесные плуги, монтируемые в виде съемного оборудования на мотовозах и маневровых тепловозах. Примечательно, что для очистки пути от снега на Николаевской железной дороге еще в XIX веке использовались аналогичные навесные плуги на паровозах.
Таблица 12.1. Технические характеристики плужных снегоочистителей
| СДПМ | СДПМ-2 | СПУ-Н | |
| Ширина захвата при открытых крыльях, м | 4,95 | 4,95 | 4,5 |
| Максимальная толщина очищаемого слоя снега, м | 1,0 | 1,0 | 1,0/1,5* |
| Максимальная рабочая скорость, км/ч | 70 | 70 | 80 |
| Максимальная транспортная скорость, км/ч | 80 | 90 | 100 |
| Масса, т | 84,0 | 84,0 | 80,0 |
| База, м | 9,0 | 9,0 | 8,0 |
* При однопутном положении отвала
12.2. Основы расчета плужных снегоочистителей
Расчеты плужных снегоочистителей могут преследовать цели: определить зону отбрасывания снега около пути, найти сопротивление движению при работе, оценить устойчивость против схода с рельсов и поперечного опрокидывания при работе и транспортировании, произвести расчет нагрузок на плуги и механизмы привода для определения их основных параметров и др.
12.2.1. Расчет ширины зоны отброса снега при работе снегоочистителя
Снежный покров на пути зависит от снежных осадков и снежных заносов. Толщина покрова за один снегопад обычно не превышает 0,2-0,25 м, вместе с тем, при снежных заносах образуется плотный покров с толщиной до нескольких метров. Толщина заноса зависит от поперечного профиля земляного полотна и количества снега, приносимого к пути при наиболее снежной зиме. Путь, расположенные на насыпи, высота которой больше толщины снежного покрова, как правило, не подвержен снежным заносам. Это, как правило, насыпи с высотой более 0,7 м. Выемки глубиной более 0,4 м подвержены сильной заносимости. По степени заносимости различают участки пути: особо сильно заносимые, сильно заносимые, средне заносимые и слабо заносимые. Степень заносимости определяется объемами снега в м3, перемещаемого к пути в течение зимы, приходящегося на 1 пог.м пути (м3/пог. м). Например, к сильно заносимым относятся участки, у которых за зиму перенос снега составляет до 600 м3/пог. м.
Помимо толщины снежного покрова, на режим работы снегоочистителя оказывает влияние плотность снежного покрова. Выпавший снег образует слой с плотностью, не превышающей r = 150-200 кг/м3. При образовании заноса снег спрессовывается и достигает плотности, превышающей r = 600 кг/м3.
Рис. 12.8. Отвалы плужных снегоочистителей:
а – плоский; б – цилиндрический; в – конический;
г – разложение на составляющие относительной скорости движения снега по отвалу Vо
Распределение отброшенного при очистке снега вдоль пути, помимо толщины покрова и плотности, зависит также от формы рабочей поверхности отвала (рис. 12.8), скорости движения снегоочистителя Vм, м/с и угла наклона отвала a, рад к направлению движения (угла атаки). Современные плужные снегоочистители оснащаются плоскими отвалами (а), отвалами цилиндрической (б) и конической (в) формы. Отвалы, имеющие криволинейную форму рабочей поверхности, позволяют подрезать и отбрасывать снег на значительное расстояние от оси пути (рис. 12.9, б) при скорости снегоочистителя, превышающей 25-30 км/ч (7-8 м/с). Снег откидывается в полосу отвода с рассеянием по большой площади, не образуя вдоль пути вала. При меньшей скорости снег не поднимается до верхней кромки отвала, поэтому перед отвалом образуется призма волочения (рис. 12.9, а), а после сдвига снега с отвала рядом с путем остается вал снега. При накапливании значительного объема снега около пути требуется использовать, например, струг-снегоочиститель, чтобы земляным устройством отодвинуть вал.
Рис. 12.9. Работа плужного снегоочистителя:
с образованием призмы волочения и вала снега вдоль пути (а) и с отбросом и рассеянием снега (б)
Рассмотрим процесс отбрасывания снега отвалом с рабочей поверхностью конической формы. Отвал цилиндрической формы тогда можно рассматривать как частный случай. При работе происходит движение снега по отвалу, которое рассматривается как относительное движение (система отсчета связана с отвалом). При подрезании слоя снега величина относительной скорости принимается равной величине скорости машины: Vо = Vм. Отвал рассматривается как клин (рис. 12.8, г), поэтому происходит подъем слоя снега по его рабочей поверхности со скоростью Vоsina и движение вдоль отвала со скоростью Vоcosa. Снег в заносе спрессован, поэтому пренебрежем также дополнительным прессованием снега, считая, что нижние слои снега на отвале подпирают верхние, поэтому не происходит замедление движения снега по отвалу. Коэффициент трения плотного снега по стальной поверхности отвала составляет f = 0,03-0,04, поэтому в модели, не требующей повышенной точности, трением можно пренебречь.
Рис. 12.10. Расчетные схемы к анализу относительного движения частицы снега относительно криволинейного отвала:
а – подъем частицы; б – относ частицы вдоль отвала; в – геометрические соотношения размеров поперечного сечения отвала;
г – траектория свободного полета частицы от верхней кромки отвала
Рассмотрим движение подъема по отвалу частицы снега массой m, кг. В верхней точке 2 отвала (рис. 12.10, а) на частицу действует сила веса mg, Н, которую можно разложить на составляющие: , направленную по касательной к поверхности отвала, и , нормальную к указанной поверхности. Кроме того, на частицу действует центробежная сила , Н (R – радиус кривизны поверхности в рассматриваемом сечении, м), и реакция отвала N, Н. Спроектировав указанные силы на направление a – a, получим уравнение равновесия:
 (12.1)
(12.1)
где g – ускорение свободного падения, g = 9,8 м/с 2 ;
g – угол наклона касательной к горизонту в верхней точке отвала, рад.
Используя это выражение, с учетом того, что Vо = Vм, можно определить критическую для рассматриваемого поперечного сечения скорость движения снегоочистителя, при которой частица будет достигать верхней кромки отвала, м/с:
 (12.2)
(12.2)
При достижении критической скорости движения реакция отвала N = 0. Если скорость движения снегоочистителя меньше критической скорости для данного сечения, то частица свалива-ется с отвала, а перед отвалом может образовываться призма волочения. Если рассматривается крайнее сечение отвала, то расчет ведется по максимальному радиусу Rmax, м. При превышении критической скорости для этого сечения отбрасывание слоя снега без образования призмы волочения гарантировано.
Вместе с подъемом частицы по отвалу происходит ее относ вдоль отвала (рис. 12.10, б). Частица начинает движение в сечении отвала с начальным радиусом Rн, м, а вылетает с отвала в сечении с радиусом Rв, м, смещаясь вдоль отвала на расстояние s, м. Определение этого относа позволяет оценить общую картину движения снега по отвалу. Очевидно, что , где tд – время движения частицы по отвалу, с. Если рассматривать подъем частицы в проекции на сечение с радиусом Rв, м, то время подъема частицы будет определяться длиной дуги Lо, м (рис. 12.10, в) и скоростью подъема. После анализа кинематических соотношений, относ частицы:
 (12.3)
(12.3)
где b – угол резания снега нижней кромкой отвала, рад.
В рассмотренной расчетной модели принято, что подъем частицы начинается от режущей кромки отвала. Для учета толщины срезаемого слоя hc принимаем, что расчетная частица поднимается с середины слоя по его толщине (фиктивная «режущая кромка» поднята на высоту hс/2 относительно нижней кромки отвала). Тогда фиктивный угол резания, который необходимо подставить в формулу (12.3), рад:
 (12.4)
(12.4)
Путь, проходимый слоем снега до верхней кромки отвала уменьшается, уменьшается также относ снега и дальность его отбрасывания. Хорошо отбрасывается слой плотного снега, толщина которого не превышает 0,4-0,5 м.
Выражение (12.3) позволяет относительно анализируемой точки вылета частицы определять точку начала подъема этой частицы. Значение радиуса Rx, м, для сечения на расстоянии x, м можно определять по интерполяционной формуле:
 (12.5)
(12.5)
где Rmax, Rmin – радиусы максимального и минимального сечений рабочей поверхности отвала, м;
B – ширина отвала по режущей кромке, м.
Дальность отброса снега от оси пути зависит от величины относительной скорости движения по отвалу и углов наклона вектора указанной скорости к горизонту и к направлению движения снегоочистителя. Кроме того, снег имеет переносную скорость Vм вместе с движением снегоочистителя. Эта скорость определяет отброс частиц по направлению движения, который с практической точки зрения менее интересен. Рассмотрим относительное движение частицы снега, вылетевшей с верхней кромки отвала. Для упрощения рассуждений считаем, что верхняя кромка отвала параллельна нижней кромке, а частица вылетела под углом g к горизонту и под углом a к направлению движения снегоочистителя. Иначе говоря, плоскость полета частицы (рис. 12.10, г) расположена в плане, приблизительно, под углом a к продольной оси пути. Частица вылетает с верхней кромки отвала, поэтому имеет начальную высоту hо = R(cosb + cosg) от УВГР, м (см. рис. 12.10, в).
Из анализа дифференциальных уравнений движения частицы по относительным координатным осям xо, yо получаются уравнения движения частицы в параметрической форме (с независимым параметром времени t):
 (12.6)
(12.6)
Исключив параметр t, получим уравнение траектории относительного движения частицы:
 (12.7)
(12.7)
В точке падения частицы на плоскость, лежащую на УВГР zо = 0. Приравняв правую часть последнего уравнения к нулю и решив получившееся квадратное уравнение, получим относительную координату в точке падения, м:
 (12.8)
(12.8)
Дальность полета частицы перпендикулярно направлению движения снегоочистителя от точки ее вылета с верхней поверхности отвала, м:
 (12.9)
(12.9)
где K – коэффициент, учитывающий влияние неучтенных факторов на дальность полета (небольшое трение снега по отвалу, боковой ветер, относящий частицы снега, расслоение слоя снега при подъеме по отвалу, его прессование или разрыхление и другие факторы).
В первом приближении можно принять K = 0,7 – 0,8.
При расчетах необходимо учитывать рассеяние снега по широкой полосе вдоль пути и определять минимальное и максимальное расстояние отбрасывания снега, чтобы, при необходимости, определить параметры режима работы снегоочистителя.
12.2.2. Тяговый расчет плужного снегоочистителя
В тяговом расчете определяются сопротивления движению плужного снегоочистителя при его работе или транспортировке для выбора параметров локомотива по его тяговой характеристике. При работе, в зависимости от скорости движения машины, рабочий процесс сопровождается образованием призмы волочения и вала снега вдоль пути, или происходит отброс снега на большое расстояние от оси пути без образования призмы волочения (см. рис. 12.9). В первом случае расчетная модель аналогична модели тягового расчета струга-снегоочистителя при работе земляным устройством (см. п. 4.3). Ввиду хорошего скольжения снега по отвалу можно пренебречь составляющей, связанной с относительным движением призмы волочения и отвала, если его поверхность гладкая. В расчетах можно принимать удельное сопротивление снега резанию по табл. 12.2.
| Плотность, кг/м 3 | 200 | 300 | 400 | 500 |
| Удельное сопротивление резанию, Па | 1600 | 3200 | 9500 | 21000 |
Рис. 12.11. Объем снега в слое, подвергаемый разгону плужным снегоочистителем
При разбрасывании снега отвалом призма волочения не образуется. Поэтому сопротивление движению отвала складывается из двух составляющих: Wр – сопротивления резанию снега, Н; и Wд динамической составляющей, связанной с разгоном снега при его захвате отвалом, Н. Рассмотрим далее подход к определению динамической составляющей. Пусть снегоочиститель движется со скоростью Vv, м/с. При движении он производит расчистку траншеи высотой hс, м и шириной Bс, м (рис. 12.11). Принимаем, что вся масса очищаемого снега получает скорость движения, равную скорости машины, соответственно, кинетическую энергию, расходуемую на подъем снега по отвалу и его отбрасывание. Работа локомотива на преодоление динамической составляющей сопротивления, Дж:
 (12.10)
(12.10)
где t – время, в течение которого совершается работа, с.
Кинетическая энергия, полученная снегом, Дж:
 (12.11)
(12.11)
где r – плотность снега в массиве, кг/м3.
Приравняв (12.10) и (12.11), получим выражение для оценки динамической составляющей сопротивления, Н:
 (12.12)
(12.12)
где Kнф – поправочный коэффициент на неучтенные факторы; Kнф = 1,2 – 1,5.
12.3. Роторные снегоочистители
(классификация, устройство, принцип действия)
Роторные снегоочистители предназначены для очистки пути от глубоких снежных заносов толщиной до 4,5 м при плотности слежавшегося снега до 800 кг/м 3 . Рабочее оборудование таких снегоочистителей включает один или два горизонтальных ротора-питателя для подрезания снега в забое и направления его к выбросному ротору, представляющему собой лопастной метатель. Для подбора снега с нижних слоев на глубину 50 мм ниже УВГР снегоочистители имеет подрезной нож, а для подачи снега к роторам-питателям и профилирования стенок траншеи они оснащается боковыми крыльями. По существу, это роторно-плужные снегоочистители.
Первые роторные снегоочистители системы американского инженера Лесли были созданы в конце 19-го века. Они имели плужную систему подачи снега к торцевому отверстию ротора-метателя в виде боковых крыльев и подрезного ножа. Ротор имел привод от паровой машины, связанной паропроводами с паровозом. Аналогичную систему забора и выброса имели роторные снегоочистители системы ЦУМЗ. Однако при заборе снега из траншеи пассивными плужными устройствами происходит его сильное прессование, поэтому ухудшаются условия подачи снега к отверстию выбросного ротора, велико рабочее сопротивление движению снегоочистителя. Глубина очистки не превышала 3 м. Для активизации процесса забора снега в 50-х годах прошлого века в качестве заборного устройства стали использовать роторы-питатели (один или два, расположенных друг над другом). Сначала использовались роторы с прямыми лопастями, вращающиеся при работе в противоположные стороны так, чтобы снег подавался к середине отверстия ротора-метателя (снегоочистители ЭСО-3). Затем были созданы фрезерно-роторные снегоочистители, оснащенные роторами-питателями в виде системы ленточных шнеков – фрез. Роторы-питатели при работе позволяют увеличить активную площадь подреза-ния и забора снега, тем самым улучшают условия подачи снега к отверстию выбросного ротора-метателя, уменьшая тяговое рабочее сопротивление снегоочистителя.
Рис. 12.12. Фрезерно-роторный электрический снегоочиститель ФРЭС-2:
1 и 3 – бытовой и машинный отсеки; 2 – кабина управления; 4 и 8 – верхняя и нижняя фрезы; 5 и 7 – конические редукторы;
6 – фланец для установки жесткой автосцепки; 9 – выбросной ротор-метатель; 10 и 12 – цилиндрические редукторы;
11 и 15 – электродвигатели привода выбросного ротора и фрез; 13 – генератор; 14 – тормозная система; 16 – рама;
17 – ходовые тележки типа 18-100; 18 – противовес; 19 – автосцепка; 20 – привод подрезного ножа;
21 – пневматические цилиндры поворота боковых крыльев; 22 – боковые крылья
Фрезерно-роторный электрический снегоочиститель ФРЭС-2 (рис. 12.12) представляет собой специально оборудованный вагон, опирающийся на две ходовых тележки 18, который имеет внутри бытовой 1 и машинный 3 отсеки, а также кабину управления 2. Спереди расположен фланец 6 для закрепления, при необходимости, жесткой автосцепки, используемой для выполнения маневров, а сзади – автосцепку 20 с поглощающим аппаратом. Снегоочиститель оборудован тормозной 15 и рабочей пневматическими системами. Рабочая пневматическая система используется для привода боковых крыльев 23 и подрезного ножа 9.
Рабочий орган снегоочистителя включает верхнюю 4 и нижнюю 8 фрезы, установленные на передней раме и выбросной ротор 10, установленный в кожухе. Привод роторов-питателей осуществляется двумя электродвигателями 16 через систему карданных валов и редукторы 13, 7 и 5, а привод выбросного ротора – двумя другими электродвигателями 12 через редуктор 11. Применены электродвигатели постоянного тока с напряжением 700 В, получающие питание от специально дооборудованного двух-секционного тепловоза 2ТЭ-116.
Рис. 12.13. Кинематическая схема привода фрез и выбросного ротора:
1, 8, 11 и 12 – карданные валы; 2 и 3 – цилиндрические редукторы; 4 – выбросной ротор; 5 – реактивный кронштейн с тягой;
6 и 10 – конические редукторы привода фрез; 7 и 9 – верхняя и нижняя фрезы; M1 … M4 – электродвигатели; G1 – генератор
Для привода роторов (рис. 12.13) применены цилиндрические редукторы 2 и 3 специального исполнения. Редуктор 2 имеет дополнительный выходной вал привода генератора G1, используемого для питания обмоток возбуждения электродвигателей M1 … M4. Ротор-метатель 4 установлен непосредственно на выходном валу редуктора 3. Нижняя 9 и верхняя 7 фрезы получают вращение через специальные конические редукторы 10 и 6. Для восприятия реактивного вращающего момента редукторы связаны с рамой рабочего органа через реактивный кронштейн 5 и тягу.
12.14. Фреза:
1 и 5 – ленточные шнеки; 2 – штифт; 3 – ось; 4 – конический редуктор;
6 – рама рабочего органа; 7 – подшипник; 8 – крышка; 9 – корпус
Фреза (рис. 12.14) монтируется через ось 3 и подшипниковые узлы на раме 6 рабочего органа и в средней части соединена с коническим редуктором 4. На оси смонтированы два ленточных шнека 1 и 5, имеющих по четыре винтовых лопасти. Рабочие режущие поверхности лопастей имеют правую и левую навивки, что позволяет во время работы смещать снег к середине машины. Если лопасть нижней фрезы находится в забое, то она срезает стружку снега и направляет ее к середине, если лопасть развернулась к подрезному ножу, то она, подобно лопасти шнекового конвейера, поднимает и сдвигает снег к отверстию выбросного ротора-метателя. В этом случае, к объему срезанного лопастью снега добавляется объем, направляемый подрезным ножом и объем, обрушенный боковыми крыльями. Верхняя фреза также срезает лопастями снег в забое, сдвигает массу снега к середине и направляет в указанное отверстие.
Рис. 12.15. Выбросной ротор-метатель:
1 – направляющая заслонка; 2 – ось; 3 – пневматический цилиндр; 4 – основание;
5 – рама машины; 6 и 8 – стенка и лопасти ротора; 7 – кожух
Выбросной ротор-метатель (рис. 12.15) включает колесо с задней стенкой 6 и шестью лопастями 8 профильной формы. Колесо установлено на выходном валу редуктора и находится в кожухе 7. Кожух имеет люки для очистки ротора при необходимости (не показаны). В верхней части кожуха на оси 2 установлена поворотная направляющая заслонка 1, имеющая привод поворота от пневмоцилиндра 3. Заслонка устанавливается в соответствии с направлением вращения ротора и направлением отбрасывания снега. Дальность отбрасывания снега до 40 м от оси ротора. Подаваемая питателем масса снега разгоняется лопастями и выбрасывается через верхнее отверстие кожуха по направляющей заслонке.
Рис. 12.16. Боковые крылья:
1 и 7 – проушина и пневматический стопор; 2 – боковое крыло; 3 – петлевой шарнир крепления крыла;
4 – цепная стяжка; 5 – подкрылок; 6 – транспортная стяжка; 8 – пневмоцилиндр поворота бокового крыла
Снегоочиститель имеет боковые крылья 2 (рис. 12.16) с подкрылками 5, которые через петлевые шарниры 3 установлены на передней раме. В транспортном положении крылья фиксируются пневматическими стопорами 7 и стяжками 6. В плане крылья поворачиваются пневматическими цилиндрами 8. При разработке пионерной траншеи крылья устанавливаются в положение, показанное пунктиром, и удерживаются стопорами 7 через проушины 1, имеющие вытянутые отверстия. При втором проходе снегоочистителя производится разработка пионерной траншеи с профилированием ее боковых стенок. Для этого стопоры выводятся из контакта с проушинами, а крылья под действием напора снега раскрываются на максимальную ширину и удерживаются цепными растяжками 4.
Рис. 12.17. Механизм привода подрезного ножа:
1 – конечный выключатель; 2 и 3 – указатель и рычажный механизм положения ножа; 4 – пневмоцилиндр положения ножа;
5 – пневматический стопор ножа; 6 – двуплечий рычаг; 7 – тяга; 8 – подрезной нож; 9 – направляющая
Подрезной нож 8 (рис. 12.17) при установках в рабочее и транспортное положения перемещается по направляющим 9 пневмоцилиндром 4 через рычажную передачу, включающую двуплечий рычаг 6 и тягу 7. В транспортном положение, рычаг 6 удерживается пневматическим стопором 5. Кроме того, для индикации положения подрезного ножа используется механический указатель 2 и концевой выключатель 1, связанные через рычажную передачу 3 с двуплечим рычагом 6.
Технические характеристики роторных снегоочистителей показаны в табл. 12.3
Таблица 12.3
| Параметры | ЭСО-3 | ФРЭС-2 |
| Производительность при плотности снега 500 кг/м3, т/ч | 7500 | 7500 |
| Толщина очищаемого слоя, м | 4,5 | 4,5 |
| Рабочая скорость при максимальной производительности, км/ч | 0,5-0,8 | 0,8-1,0 |
| Ширина разрабатываемой траншеи, м: при закрытых крыльях при открытых крыльях: поверху понизу | 3,4 |
6,0
5,0
5,1
4,6

 (12.13)
(12.13)
 (12.14)
(12.14)  (12.15)
(12.15)  (12.16)
(12.16) 
 (12.17) )
(12.17) )  (12.18)
(12.18) (12.19)
(12.19)
 (12.20)
(12.20)  (12.21)
(12.21)  (12.22)
(12.22)  (12.23)
(12.23) (12.24)
(12.24)  (12.25)
(12.25) (12.26)
(12.26) (12.27)
(12.27) (12.28)
(12.28)
 (12.29)
(12.29) (12.30)
(12.30) (12.31)
(12.31)  (12.32)
(12.32)  (12.33)
(12.33) 
 (13.10)
(13.10) (13.11)
(13.11) (13.12)
(13.12) (13.13)
(13.13) (13.14)
(13.14) (13.15)
(13.15) (13.16)
(13.16) (13.17)
(13.17) (1318)
(1318) (13.19)
(13.19)
 (13.20)
(13.20)
 (14.1)
(14.1)
 (14.2)
(14.2)
 (14.3)
(14.3)
 (14.4)
(14.4)
 (14.5)
(14.5)
 (14.6)
(14.6) (11.7)
(11.7)
 (14.8)
(14.8)
 (14.9)
(14.9)
 (14.10)
(14.10) (14.11)
(14.11) (14.13)
(14.13) (14.14)
(14.14)
 (14.15)
(14.15)