Особенности машины с последовательным возбуждением
Главное меню
Судовые двигатели
Электродвигатели постоянного тока с последовательным возбуждением имеют одно существенное отличие от рассмотренных в предыдущей главе электродвигателей с параллельным возбуждением. У последних магнитный поток Ф практически не зависит от нагрузки и является величиной постоянной, что и определяет все основные свойства электродвигателей с параллельным возбуждением и, в частности, жесткость их характеристик.
У электродвигателя постоянного тока с последовательным возбуждением обмотка возбуждения включается последовательно с якорем (см. рис. 4, в), вследствие чего через обмотки якоря и возбуждения протекает один и тот же ток и при изменении нагрузки изменяется и магнитный поток [см. формулу (5)].
В данном случае каждому значению момента соответствует определенный магнитный поток, так как величина момента определяет величину тока якоря I я . При малых нагрузках, когда магнитная цепь электродвигателя не насыщена, магнитный поток прямо пропорционален току, а момент, следовательно, — квадрату тока:

По мере возрастания нагрузки магнитная цепь электродвигателя насыщается и квадратичная зависимость между моментом и током нарушается. В общем случае зависимость между магнитным потоком и током определяется характеристикой намагничивания Ф=f(I я ), которая обычно строится на основании опытных данных (рис. 19). Характеристика намагничивания практически прямолинейна лишь до определенного предела. Как только магнитная цепь электродвигателя достигает насыщения, прямолинейность характеристики намагничивания нарушается, т. е. нарушается прямая пропорциональность между магнитным потоком и током. Однако при I я >I я . н магнитный поток Ф>Ф н , поэтому вращающий момент электродвигателя последовательного возбуждения оказывается больше, чем момент электродвигателя параллельного возбуждения, у которого при I я >I я . н Ф = Ф н . Это является важным преимуществом электродвигателя последовательного возбуждения, так как дает возможность получить при пуске и торможении повышенные моменты и сократить тем самым время протекания переходных процессов.

Зависимость вида Ф = f(I я ) не имеет аналитического выражения. Поэтому для электродвигателей последовательного возбуждения в каталогах электрических машин приводятся зависимости вида М=f(I я ), полученные опытным путем. Они задаются графически (рис. 20) или в табличной форме. Эти заводские кривые М = f(I я ) являются основой для построения механических и скоростных характеристик, причем при построении учитывается не только влияние насыщения, но и влияние реакции якоря.
Характеристики двигателей последовательного возбуждения
В двигателе последовательного возбуждения, который иногда называют сериесным, обмотка возбуждения включена последовательно с обмоткой якоря (рис. 1). Для такого двигателя справедливо равенство Iв=Ia=I, следовательно, его магнитный поток Ф зависит от нагрузки Ф=f (Ia). В этом главная особенность двигателя последовательного возбуждения и она определяет его свойства.

Рис. 1 — Схема электродвигателя последовательного возбуждения
Скоростная характеристика представляет зависимость n=f (Ia) при U=Uн. Она не может быть точно выражена аналитически во всем диапазоне изменения нагрузки от холостого хода до номинальной из-за отсутствия прямой пропорциональной зависимости между Ia и Ф. Приняв допущение Ф=кIa, запишем аналитическую зависимость скоростной характеристики в виде

При увеличении тока нагрузки гиперболический характер скоростной характеристики нарушается и приближается к линейному, так как при насыщении магнитной цепи машины с увеличением тока Ia магнитный поток остается практически постоянным (рис. 2). Крутизна характеристики зависит от величины Σr.

Рис. 2 — Скоростные характеристики двигателя последовательного возбуждения
Таким образом, скорость сериесного двигателя резко изменяется с изменением нагрузки и такая характеристика называется «мягкой».
При малых нагрузках (до 0,25 Iн) скорость двигателя последовательного возбуждения может возрасти до опасных пределов (двигатель идет «вразнос»), поэтому работа таких двигателей на холостом ходу не допускается.
Моментная характеристика — это зависимость M=f (Ia) при U=Uн. Если предположить, что магнитная цепь не насыщена, то Ф=кIa и, следовательно , имеем
Это уравнение квадратичной параболы.
Кривая моментной характеристики изображена на рисунке 3.8. По мере увеличения тока Ia магнитная система двигателя насыщается, и характеристика постепенно приближается к прямой.

Рис. 3 — Моментная характеристика двигателя последовательного возбуждения
Таким образом, электродвигатель последовательного возбуждения развивает момент, пропорциональный Ia 2 , что и определяет главное его преимущество. Так как при пуске Ia=(1,5. 2) Iн, то двигатель последовательного возбуждения развивает значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения, поэтому он широко используется в условиях тяжелых пусков и при возможных перегрузках.
Механическая характеристика представляет собой зависимость n=f (M) при U=Uн. Аналитическое выражение этой характеристики может быть получено только в частном случае, когда магнитная цепь машины ненасыщенна и поток Ф пропорционален току якоря Ia. Тогда можно записать

Решая совместно уравнения , получаем

т.е. механическая характеристика двигателя последовательного возбуждения, также как и скоростная, имеет гиперболический характер (рис. 4).

Рис. 4 — Механические характеристики двигателя последовательного возбуждения
ПУСК СИНХРОННОГО ДВИГАТЕЛЯ
Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной.
В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током Iпв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм.
Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого Rдоб превышает в 8 — 12 раз активное сопротивление Rв обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Ев = 4,44f2wвФm = 4,4f1swвФm , где f2 = f1s — частота изменения тока в обмотке возбуждения; wв — число витков обмотки возбуждения; Фm — амплитуда магнитного потока вращающегося поля.
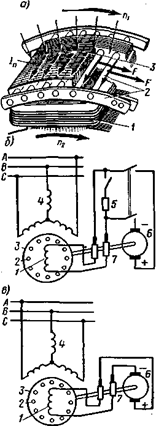 |
| Рис. 6.48. Устройство пусковой обмотки синхронного двигателя (о) и схемы его асинхронного пуска (б и в): 1 — обмотка возбуждения; 2 — пусковая обмотка; 3 — ротор; 4 — обмотка якоря; 5 — гасящее сопротивление; 6 — якорь возбудителя; 7 — кольца и щетки |
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Ев может достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением Rв весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до
s = 0,3 ÷ 0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при s ≈ 0,05 втягивание ротора в синхронизм. Различие пусковых схем обусловлено тем, что не во всех случаях может быть применена более простая схема с постоянно подключенной к возбудителю обмоткой возбуждения (рис. 6.48, в), так как она имеет худшие пусковые характеристики, чем более сложная схема, приведенная на рис. 6.48,б. Главной причиной ухудшения пусковых характеристик является возникновение одноосного эффекта — влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
Одноосный эффект.Для анализа этого явления предположим сначала, что в двигателе отсутствует пусковая обмотка, а обмотка возбуждения замкнута накоротко. В результате при асинхронном пуске двигателя в обмотке возбуждения индуцируется ЭДС с частотой f2 = f1s и по обмотке проходит переменный ток, создающий пульсирующее магнитное поле (обмотка возбуждения в этом случае является однофазной обмоткой переменного тока). Пульсирующее магнитное поле можно разложить на две составляющие: прямое и обратное вращающиеся магнитные поля ротора, которые характеризуются потоками Фпр и Фобр . Частота вращения каждого из этих полей относительно ротора
пр=±60f2/р=±60f1s/p=±n1s.
Относительно статора прямое поле вращается с частотой
Следовательно, оно вращается синхронно с полем статора; образуемый этим полем с током статора электромагнитный момент Мпр изменяется в зависимости от скольжения так же, как и в трехфазном асинхронном двигателе (рис. 6.49, кривая 2). Обратное поле ротора вращается относительно статора с частотой
При частотах вращения ротора n2 0,5, обратное поле, как видно из формулы (6.47), перемещается относительно статора в сторону, противоположную направлению вращения ротора; при n2 = 0,5n1, это поле неподвижно относительно статора; при n2 > 0,5 (т. е. при s п>пКр эти характеристики имеют примерно такую же форму, как и при регулировании частоты вращения путем включения реостата в цепь якоря Критическая частота вращения
Рис 7 32 Скоростные и механические характеристики двигателя с параллельным возбуждением при им пульсном регулирова
НИИ
Рис 7 33 Схемы частотно- (а) и широтно-импульсных (б) тиристорных преобразователей для питания двигателей
сти периода Т между подачей управляющих импульсов на электронный ключ ТК при T=const (частотно-импульсное регулирование), либо времени т при постоянном значении Т (широтно-импульсное регулирование) Используют также комбинированное регулирование, при котором изменяется как Т, так и т
В настоящее время импульсное регулирование двигателей малой мощности и микродвигателей осуществляется с помощью импульсных прерывателей, в которых коммутирующими элементами являются транзисторы Для регулирования двигателей средней и большой мощностей применяются прерыватели с тиристорами Так как тиристор, в отличие от транзистора, не полностью управляемый вентиль, то для его запирания применяются различные схемы искусственной коммутации, обеспечивающие прерывание проходящего тока путем подачи на его электроды обратного напряжения
На рис 7 33 показаны две простейшие схемы импульсных тиристорных прерывателей Схему, изображенную на рис 7 33, а, используют при частотно-импульсном регулировании Тиристор Т отпирается импульсом тока на его управляющий электрод, а запирается

коммутирующим конденсатором Ск. Перед включением тиристора конденсатор Сь заряжен до напряжения UK. При подаче отпирающего импульса на управляющий электрод тиристор 7 открывается и через двигатель начинает проходить ток ia. Одновременно происходит перезаряд конденсатора Сн через резонансный контур, содержащий индуктивность L\. После окончания перезаряда, когда полярность конденсатора меняется, к тиристору прикладывается обратное напряжение. При этом тирисгор восстанавливает свои запирающие свойства и ток через него прекращается. В дальнейшем конденсатор заряжается через нагрузку и схема оказывается подготовленной для последующего отпирания тиристора. Время открытого состояния тиристора определяется параметрами резонансной цепи: Li и С„.
Схема, изображенная на рис. 7.33, б, используется при широтно-импульсном и комбинированном регулировании. В рассматриваемой схеме импульсный прерыватель имеет два тиристора: главный 71 и вспомогательный 72. Главный тиристор 71 запирается коммутирующим конденсатором Ск, подключаемым к тиристору 71 в требуемые моменты времени вспомогательным тиристором 72. После запирания тиристора 71 коммутирующий конденсатор заряжается от источника питания через тиристор 72 и якорь двигателя, а после повторного открытия главного тиристора 71 перезаряжается через цепочку, содержащую индуктивность Lt и диод Д\, и приобретает полярность, требуемую для последующего запирания тиристора 71.
Торможение при импульсном регулировании.При работе двигателя от импульсного прерывателя возможны его рекуперативное и динамическое торможения. Наиболее интересная особенность рекуперативного торможения при импульсном регулировании — возможность осуществления его при ЭДС двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д — между якорем и питающей сетью (рис. 7.34, а). При отпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и накапливается электромагнитная энергия в индуктивностях (L + La), а возникающая ЭДС самоиндукции eL уравновешивает ЭДС машины Е (рис. 7.34, б). При запирании прерывателя ИП ток ia под действием ЭДС самоиндукции проходит через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней ЭДС якоря Е и напряжением сети U.
Из закона сохранения энергии IacpE=IccvU следует
Следовательно, при уменьшении частоты вращения якоря ток h rp, отдаваемый в сеть, уменьшается, хотя может оставаться по-
стоянным ток якоря, а следовательно, и тормозящий электромагнитный момент.
По мере снижения частоты вращения п и ЭДС Е для поддержания требуемого значения тока 1а гР увеличивают частоту тока при частотно-импульсном регулировании или длительность импульса т. при широтно-импульсном. При малой частоте вращения, когда а растет до единицы, якорь машины остается все время замкнутым накоротко и отдача энергии в сеть прекращается. Однако ток 1а ср проходит через якорь и режим торможения осуществляется практически до полной остановки.
Частота вращения /гкр, при которой прекращается рекуперативное торможение,
Рис. 7.34. Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании
где /?Ип — сопротивление элементов импульсного прерывателя (тиристоров и индуктивности L), по которым замыкается ток 1а—
Динамическое торможение осуществляется аналогично, однако в схеме (рис. 7 34, а) вместо сети и фильтра Z-фСф включается реостат, в котором гасится энергия, отдаваемая машиной.
Импульсное регулирование широко применяется при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
В схеме «управляемый выпрямитель — двигатель» и при импульсном регулировании в цепи якоря находится быстродействующий регулятор напряжения, благодаря чему могут быть существенно улучшены переходные процессы в двигателе, возникающие при резких колебаниях нагрузки, напряжения питающей сети и по другим причинам.


Параметры синхронных машин
В паспортных данных синхронной машины (генератора, компенсатора, электродвигателя) приводятся следующие параметры, выраженные или в процентах, или в относительных единицах*: xd ,xq— синхронные реактивности в продольной и поперечной осях; xd ,xq -переходные реактивности в продольной и поперечной осях (xq = xq);x»d x»q — сверхпереходные реактивности в продольной и поперечной осях; х2, х — реактивности обратной и нулевой последовательностей; ra, rв — активное сопротивление фаз статора и омическое сопротивление обмотки возбуждения; rrd, rrq — активное сопротивление продольного и поперечного демпферных контуров. В соответствии с наименованиями реактивностей обозначаются ЭДС машины также в относительных единицах: Eq, Е’q Е»q — синхронная, переходная и сверхпереходная ЭДС в поперечной оси, соответственно; Е’,Е» — переходная и сверхпереходная ЭДС, соответственно.