Электрические машины переменного тока
Электрические машины служат для превращения механической энергии в электрическую (генераторы переменного и постоянного тока) и для обратного превращения (электродвигатели).
Во всех указанных случаях используются в сущности три основных открытия в области электромагнетизма: явление механического взаимодействия токов, открытое Ампером в 1821 г., явление электромагнитной индукции, открытое Фарадеем в 1831 г., и теоретическое обобщение этих явлений, сделанное Ленцем (1834 г.) в его известном законе о направлении индукционного тока (по существу закон Ленца предвосхитил закон сохранения энергии для электромагнитных процессов).

Для преобразования механической энергии в электрическую или обратно необходимо создать относительное движение проводящего контура с током и магнитного поля (магнита или тока).
В электрических машинах, рассчитанных на длительную работу, используется вращательное движение подвижной части машины (ротор машины переменного тока), расположенной внутри неподвижной части (статора). Обмотка машины, служащая для создания магнитного поля, называется индуктором, а обмотка, обтекаемая рабочим током, называется якорем. Оба последних термина употребляются и для машин постоянного тока.
Для увеличения магнитной индукции обмотки машин размещаются на ферромагнитных телах (сталь, чугун).
Все электрические машины обладают свойством обратимости, т. е. могут использоваться как в качестве генераторов электрической энергии, так и в качестве электродвигателей.

В асинхронных двигателях используется одно из проявлений электромагнитной индукции. В курсах физики оно демонстрируется следующим образом:
Под медным диском, способным вращаться вокруг вертикальной оси, проходящей через его центр, помещается вертикальный подковообразный магнит, приводимый во вращение вокруг той же оси (механическое взаимодействие диска и магнита исключено). При этом диск приходит во вращение в ту же сторону, что и магнит, но с меньшей скоростью. Если увеличить механическую нагрузку на диск (например, увеличив трение оси о подпятник), то скорость его вращения уменьшается.
Физический смысл этого явления легко объясняется теорией электромагнитной индукции: при вращении магнита создается вращающееся магнитное поле, наводящее в диске вихревые токи величина последних зависит при прочих равных условиях от относительной скорости поля и диска.
Согласно закону Ленца диск должен прийти во вращение в направлении поля. При отсутствии трения диск должен приобрести угловую скорость, равную скорости магнита, тогда ЭДС индукции исчезнет. В реальных условиях трение неизбежно присутствует, и диск приобретает меньшую скорость. Ее величина зависит от механического тормозящего момента, испытываемого диском.
Несовпадение скорости вращения диска (ротора) со скоростью вращения магнитного поля отражено в названии двигателей.
Принцип действия асинхронных двигателей:
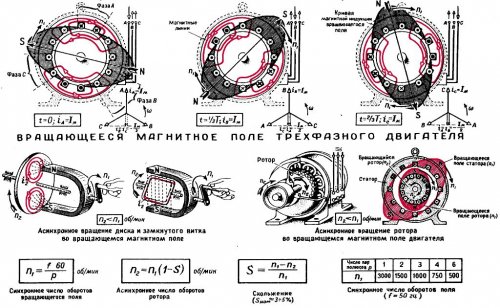
В технических асинхронных двигателях (чаще всего трехфазных) вращающееся магнитное поле создается многофазным током, обтекающим обмотку неподвижного статора. При частоте трехфазного тока f и числе катушек статора 3 р вращающееся поле делает n = f/p об/сек.

В полости статора располагается способный вращаться ротор. С его валом можно соединить механизм, приводимый во вращение. В простейших «короткозамкнутых» двигателях ротор состоит из системы продольных металлических стержней, помещаемых в пазы стального цилиндрического тела. Провода соединены накоротко двумя кольцами. Для увеличения вращательного момента радиус ротора делается достаточно большим.

В других конструкциях двигателей (обычно — это двигатели большой мощности) проводники ротора образуют разомкнутую трехфазную обмотку. Концы катушек замкнуты накоротко в самом роторе, а начала выведены к трем контактным кольцам, насаженным на вал ротора и изолированным от него.
К этим кольцам при помощи скользящих контактов (щеток) присоединен трехфазный реостат, который служит для пуска двигателя в ход. После того как двигатель раскрутится, реостат полностью выводят, и ротор превращается в короткозамкнутый (смотрите — Асинхронные двигатели с фазным ротором).

На теле статора имеется доска для зажимов. К ним выводятся обмотки статора. Они могут быть включены звездой, либо треугольником, в зависимости от напряжения сети: в первом случае линейное напряжение может быть в 1,73 раз больше, чем во втором.
Величина характеризующая относительное запаздывание ротора по сравнению с полем статора у асинхронного двигателя, называется скольжением. Она изменяется от 100% (в момент пуска двигателя) до нуля (идеальный случай движения ротора без потерь).
Перемена направления вращения асинхронного двигателя достигается взаимным переключением каких-либо двух линейных проводов электрической сети, питающей двигатель.

Короткозамкнутые двигатели широко применяются в промышленности. Достоинствами асинхронных двигателей являются простота конструкции и отсутствие скользящих контактов.
Основным недостатком таких двигателей до последнего времени считалась трудность регулировки числа оборотов, т.к. если для этого изменять напряжение цепи статора, то резко меняется вращающий момент, изменять же частоту питающего тока было технически затруднительно. В настоящее время для регулирования частоты питающего тока для изменения частоты вращения двигатели нашли широкое распространение современные микропроцессорные устройства — частотные преобразователи.
Генераторы переменного тока
Генераторы переменного тока строятся на значительные мощности и высокие напряжения. Как и асинхронные машины, они имеют две обмотки. Обычно обмотка якоря располагается в теле статора. Индукторы, создающие первичный магнитный поток, монтируются на роторе и питаются от возбудителя — небольшого генератора постоянного тока, смонтированного на валу ротора. В мощных машинах возбуждение иногда создается выпрямленным переменным напряжением.
Благодаря неподвижности обмотки якоря отпадают технические затруднения, связанные с использованием скользящих контактов при больших мощностях.
На рисунке ниже схематически изображен однофазный генератор. Его ротор имеет восемь полюсов. На них намотаны катушки (не показанные на рисунке), питаемые от постороннего источника постоянным током, подводимым к контактным кольцам, укрепленным на валу ротора. Полюсные катушки намотаны таким образом, что знаки полюсов, обращенных к статору, чередуются. Число полюсов обязательно четное.
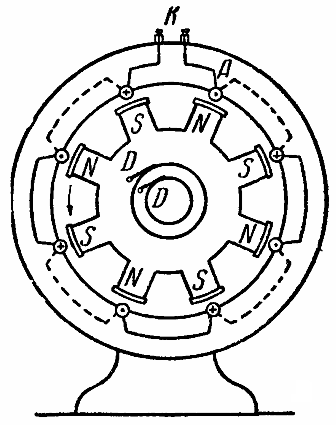
В теле статора размещена обмотка якоря. Ее длинные рабочие «активные» проводники, перпендикулярные к плоскости чертежа, показаны на рисунке кружками, они пересекаются линиями магнитной индукции при вращении ротора.
В кружках указано мгновенное распределение направлений индуцированных электрических полей. Соединительные провода, идущие по передней стороне статора, показаны сплошными линиями, а по задней стороне — пунктиром. Зажимы К служат для присоединения внешней цепи к обмотке статора. Направление вращения ротора указано стрелкой.
Если мысленно разрезать машину по радиусу, проходящему между зажимами К, и развернуть на плоскость, то взаимное расположение обмотки статора и полюсов ротора (сбоку и в плане) изобразится схематическим рисунком:
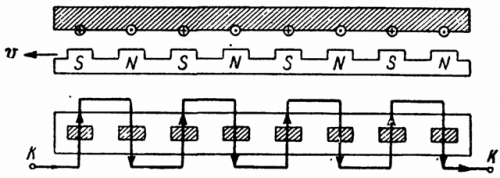
Рассматривая рисунок, убеждаемся, что все активные проводники (проходящие над полюсами индуктора) соединены друг с другом последовательно, причем индуцируемые в них ЭДС суммируются. Фазы всех ЭДС, очевидно, получаются одинаковыми. За время одного полного оборота ротора в каждом из проводников (и, следовательно, во внешней цепи) получится четыре полных периода изменения тока.
Если электрическая машина имеет p пар полюсов и ротор вращается, совершая n оборотов в секунду, то частота получаемого от машины переменного тока равна f = pn гц.
Так как частота ЭДС в сети должна быть неизменна, то скорость вращения роторов должна быть постоянна. Для получения ЭДС технической частоты (50 гц) можно использовать сравнительно медленное вращение, если число полюсов ротора достаточно велико.
Для получения трехфазного тока в теле статора располагают три отдельные обмотки. Каждая из них смещена относительно двух других на одну треть дугового расстояния между соседними (разноименными) полюсами индукторов.
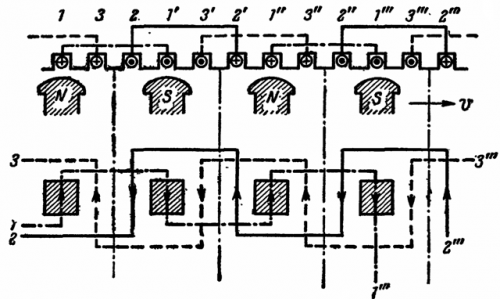
Легко убедиться, что при вращении индукторов в обмотках индуцируются ЭДС, сдвинутые по фазе (во времени) на 120°. Концы обмоток выводятся из машины и могут соединяться звездой или треугольником.
В генераторе относительная скорость поля и провода определяется диаметром ротора, числом оборотов ротора в секунду и числом пар полюсов.

Если генератор приводится во вращение током воды (гидрогенератор), то обычно он делается тихоходным. Для получения нужной частоты тока приходится увеличивать число полюсов, что в свою очередь требует увеличения диаметра ротора.
По ряду технических соображений мощные гидрогенераторы имеют обычно вертикальный вал и располагаются над гидротурбиной, приводящей их во вращение.

Генераторы, движимые паровыми турбинами — турбогенераторы, обычно быстроходны. Для уменьшения механических усилий они имеют малые диаметры и соответственно небольшое число полюсов. Ряд технических соображений заставляет делать турбогенераторы с горизонтальным валом.
Если генератор приводится во вращение двигателем внутреннего сгорания, то его называют дизель-генератором, так как в качестве двигателей обычно применяют дизели, потребляющие более дешевое топливо.

Обратимость генераторов, синхронные двигатели
Если к обмотке статора генератора приключить переменное напряжение от внешнего источника, то возникнет взаимодействие полюсов индуктора с магнитным полем тока, создавшегося в статоре, причем на все полюсы будут действовать вращающие моменты одного и того же направления.
Если ротор вращается с такой скоростью, что как раз через половину периода переменного тока под рассматриваемый проводник обмотки статора подойдет следующий полюс индуктора (противоположный по знаку первому полюсу), то знак силы взаимодействия между ним и током, изменившим свое направление, останется прежним.
При этих условиях ротор, находясь под непрерывным воздействием вращающего момента, будет продолжать свое движение и сможет приводить в действие какой-либо механизм. Преодоление сопротивлений движению ротора будет происходить за счет энергии, потребляемой из сети, и генератор превратится в электродвигатель.

Следует отметить, однако, что непрерывное движение возможно лишь при строго определенной скорости вращения, так как при отклонении от нее на каждый из полюсов ротора, перемещающийся между двумя проводниками статора, часть времени будет действовать ускоряющий вращающий момент, часть же времени — тормозящий.
Таким образом, скорость вращения двигателя должна быть строго определенной,— время, в течение которого полюс заменяется следующим, должно совпадать с полупериодом тока, поэтому подобные двигатели и называются синхронными.
Если переменное напряжение подается в обмотку статора при неподвижном роторе, то, хотя все полюсы ротора в течение первого полупериода тока и испытывают действие вращающих моментов одного и тою же знака, все же вследствие инерции ротор не успеет сдвинуться с места. В следующий полупериод знак вращающих моментов для всех полюсов ротора изменится на обратный.
В результате ротор будет вибрировать, но вращаться не сможет. Поэтому синхронный двигатель необходимо сначала раскрутить, т. е. довести до нормального числа оборотов, и лишь после этого включать ток в обмотку статора.
Раскручивание синхронных двигателей производится механическими способами (при малых мощностях) и специальными электрическими устройствами (при больших мощностях). 
При небольших изменениях нагрузки режим двигателя автоматически изменяется, приспосабливаясь к новой нагрузке. Так, при увеличении нагрузки на вал двигателя ротор мгновенно затормаживается. Благодаря этому меняется фазовый сдвиг между напряжением сети и противодействующей ЭДС индукции, наводимой индуктором в обмотке статора.
Кроме того, реакция якоря создает размагничивание индукторов, поэтому ток в статоре растет, индукторы испытывают увеличенный вращающий момент и двигатель, вновь начинает вращаться синхронно, преодолевая увеличенную нагрузку. Аналогичный процесс происходит при уменьшении нагрузки.
При резких колебаниях нагрузки эта приспособляемость двигателя может оказаться недостаточной, скорость его изменится значительно, он «выпадет из синхронизма» и в конце концов остановится, при этом исчезает ЭДС индукции, наводившаяся в статоре, и ток в нем резко увеличивается. Поэтому следует избегать резких колебаний нагрузки. Для остановки двигателя, очевидно, нужно сначала выключить цепь статора, а потом уже выключать индукторы, при пуске двигателя следует придерживаться обратного порядка операций.
Синхронные двигатели наиболее часто применяются для привода механизмов, которые работают с постоянной скоростью. Достоинства и недостатки синхронных двигателей, а также способы их пуска рассмотрены здесь: Синхронные двигатели и их применение
ПРИНЦИП ДЕЙСТВИЯ И УСТРОЙСТВО ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА. СИНХРОННЫЕ МАШИНЫ
Машины переменного тока по устройству немного отличаются от машин постоянного тока. Каждая машина состоит из двух основных частей: неподвижной части, называемой статором, и вращающейся части, называемой ротором. В отличие от машин постоянного тока у машин переменного тока на статоре укладывают обмотку якоря, а на роторе — обмотку возбуждения. Вместо коллектора на роторе имеются изолированные кольца, по которым ток проводится в обмотку возбуждения. Машины переменного тока бывают синхронные и асинхронные.
Си н х р о н н ы м и называются такие машины переменного тока, частота вращения которых определяется частотой тока. С изменением частоты тока у таких машин одновременно (синхронно) меняется частота вращения. Как правило, у синхронных машин по обмотке возбуждения проходит постоянный ток от постороннего источника. Синхронные машины обратимы, т. е. могут работать в качестве генераторов и электродвигателей. Конструкция синхронного двигателя почти не отличается от конструкции синхронного генератора.
Так как на судах морского флота цепи переменного тока питаются от трехфазных синхронных генераторов, то остановимся на их устройстве и принципе работы.
Обмотка якоря трехфазного синхронного генератора располагается в статоре и состоит из трех отдельных обмоток-фаз, сдвинутых относительно друг друга на 120°С (1/3 периода) с таким расчетом, чтобы индуктируемая э. д. с. в каждой фазе достигала своего максимума спустя 1/3 периода после максимума э. д. с. соседней фазы. Обмотку возбуждения укладывают на роторе, и источником питания для нее может быть небольшой генератор постоянного тока (возбудитель), смонтированный па одном валу с синхронным генератором, или даже аккумуляторная батарея.
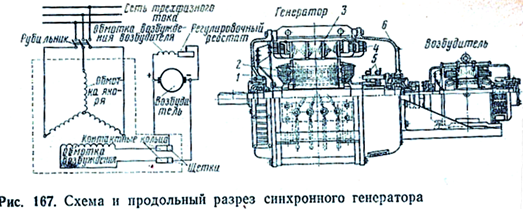
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного переменного тока с возбудителем.
Обмотки статора соединяются между собой звездой или треугольником, при этом во внешнюю цепь от обмотки статора отходят три провода (три контакта). На рис. 167 даны схема и продольный разрез синхронного генератора трехфазного .переменного тока с возбудителем.
Ротор состоит из сердечников полюсов 1, катушки обмотки возбуждения 2, питаемой постоянным током через контактные кольца 5. Статор состоит из активной стали якоря 3, служащей магиитопроводом, и станины 6, служащей для крепления стали якоря и установки машины на фундамент. Активная сталь якоря набирается из листов специальной стали толщиной 0,5 или 0,35 мм. Листы изолируются с обеих сторон специальным лаком. Обмотка 4 укладывается в пазах, выштампованных в стали статора.
На рис. 168, а показано размещение трехфазной обмотки статора (на одной четвертой его части), а на схемах б и в — соединение обмотки статора в треугольник и в звезду.
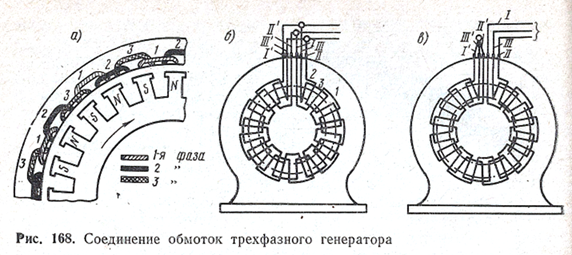
При соединении в треугольник начало первой фазы I соединяется с концом II, начало II — с концом III и, наконец, начало III — с концом I.При соединении обмоток статора звездой концы всех фаз соединяются в одну точку, называемую нулевой, а начала всех фаз остаются свободными, и к ним присоединяется внешняя цепь, в которую подается вырабатываемая генератором электрическая энергия.
Синхронные трехфазные генераторы являются в настоящее время основными источниками электрической энергии как на береговых, так и на судовых электрических станциях любой мощности.
В настоящее время на морских судах получили широкое распространение синхронные генераторы, у которых обмотка возбуждения питается током статора, предварительно выпрямленным с помощью выпрямителей. Схема возбуждения этих машин обеспечивает такое изменение тока возбуждения, при котором напряжение на выводах генератора поддерживается практически постоянным. Такие генераторы называются синхронными генераторами с самовозбуждением и саморегулированием напряжения.
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Для того чтобы синхронный генератор заставить работать в режиме двигателя, нужно отключить первичный двигатель и к обмоткам фаз статора подвести трехфазный ток из цепи. В этом случае генератор станет синхронным электродвигателем, потребляющим ток. Проходя по обмоткам фаз, переменный трехфазный ток создает вращающееся магнитное поле, которое, взаимодействуя с электромагнитом ротора, увлекает его в сторону своего вращения. В результате ротор будет вращаться с такой же частотой, как и вращающееся магнитное поле, при этом он не остановится, даже если дать ему нагрузку, соединив с каким-нибудь механизмом. В этом и заключается сущность работы синхронного электродвигателя.
Регулирование частоты вращения ротора синхронного двигателя производится изменением частоты тока цепи, а изменение направления вращения ротора — переключением двух любых фаз, Т. е. взаимным пересоединением двух питающих проводов. К недостаткам синхронных двигателей относится то, что при пуске их приходится разворачивать посторонним механизмом до частоты вращения, обеспечивающей вращающееся магнитное поле статора.
Для устранения этого недостатка применяют асинхронный пуск синхронных электродвигателей, который заключается в том, что при пуске через специальные обмотки ротора перепускают переменный ток от цепи.
ТРАНСФОРМАТОРЫ
Трансформатором называется электромагнитный аппарат, предназначенный для повышения или понижения напряжения переменного тока. Действие трансформатора основано на явлении электромагнитной индукции.
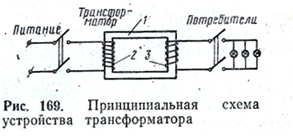
Трансформатор состоит из замкнутого стального сердечника 1 (рис. 169), собранного из пластин специальной трансформаторной стали. На сердечник надеваются .катушки 2 и 3 (обмотки) с различным числом витков изолированной проволоки. Одна обмотка, называемая первичной 2, присоединяется к источнику переменного тока. В ней создается переменное магнитное поле, намагничивающее сердечник. В другой обмотке — вторичной 3 (вторичных обмоток может быть и несколько) вследствие электромагнитной индукции возникает переменный ток.
Напряжение на концах вторичной обмотки зависит от числа витков в этой обмотке. Если число витков вторичной обмотки равно числу витков первичной обмотки, то напряжение тока во вторичной обмотке будет таким же, как и в первичной обмотке. Если число витков вторичной обмотки будет меньше числа витков первичной обмотки, например, «в два раза, то и напряжение, даваемое вторичной обмоткой, будет в два раза меньше, чем в первичной обмотке.
Трансформатор, дающий напряжение меньше, чем в цепи первичной обмотки, называется понижающим, а трансформатор, дающий напряжение больше, чем в цепи первичной обмотки, называется повышающим.
Если вторичная обмотка разомкнута с цепью, а к зажимам первичной обмотки подается питание, то такой режим работы трансформатора называется х о л о с т ы м ходом. Если не считать потерь на нагревание проводников обмоток и сердечника трансформатора, то при трансформации первичный и вторичный токи приблизительно обратно пропорциональны числам витков соответствующих обмоток, а э. д. с. первичной и вторичной обмоток прямо пропорциональны числам витков соответствующих обмоток. Мощность первичного тока в трансформаторах приблизительно равна мощности вторичного тока, а силы токов в обмотках трансформатора обратно пропорциональны напряжениям на этих обмотках.
Чтобы трансформировать трехфазный ток, применяют трехфазные трансформаторы с тремя первичными и тремя вторичными обмотками (трехстержневые) или групповые, которые составляются из трех однофазных (в каждую фазу включают по трансформатору). Первичные и вторичные обмотки могут соединяться между собой звездой или треугольником. Процессы, происходящие в каждой фазе трехфазного трансформатора в принципе не отличаются от таковых в однофазных трансформаторах.
Кроме трехфазных, применяются (в основном для установок низкого напряжения) так называемые автотрансформаторы, у которых имеется только одна обмотка, часть которой является общей для первичной и вторичной цепи.
На судах применяются специальные типы судовых трансформаторов для установки на открытых палубах и в закрытых помещениях. Все судовые трансформаторы выпускаются в закрытых кожухах, снабженных лапами для крепления.
Трансформатор перед включением в цепь необходимо осмотреть и убедиться в отсутствии посторонних предметов, грязи, воды и масел на нем и вблизи вентиляционных отверстий.
АСИНХРОННЫЕ ДВИГАТЕЛИ
Асинхронными называются двигатели, у которых частота вращения ротора отстает от частоты вращения магнитного поля статора при прохождении в его обмотках трехфазного тока.
При прохождении в обмотках статора трехфазной машины трехфазного тока возникает вращающееся магнитное поле, под действием которого в роторе индуктируется электрический ток. В результате взаимодействия вращающегося магнитного поля статора с токами, индуктируемыми в проводниках ротора, возникает механическое усилие, действующее на проводник с током, которое и создает вращающий момент, приводящий в движение ротор. При этом частота вращения ротора у асинхронного двигателя всегда меньше частоты вращения вращающегося магнитного поля статора за счет скольжения ротора, которое у современных двигателей составляет примерно 2—5%.
Таким образом асинхронный двигатель получает энергию, подводимую к ротору вращающимся магнитным потоком (индуктивно), в отличие от двигателей постоянного тока, у которых энергия подводится по проводам. Асинхронные двигатели в отличие от синхронных возбуждаются переменным током.
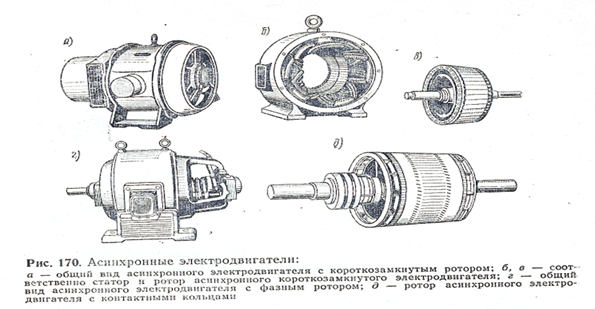
Асинхронный двигатель, как и синхронный, состоит из двух основных частей: статора с обмотками фаз, по которым проходит трехфазный переменный ток, и ротора, ось которого уложена в подшипниках. Ротор может быть короткозамкнутым и фазным (рис. 170).
Короткозамкнутый ротор (рис. 170, в) представляет собой цилиндр, по окружности которого параллельно его оси расположены проводники, замкнутые между собой с обеих сторон ротора кольцами (в виде беличьего колеса).
Асинхронный двигатель с таким ротором называется короткозамкнутым. К его недостаткам относятся: малый пусковой момент и большой ток в обмотках статора при пуске. Если хотят увеличить пусковой момент или уменьшить пусковой ток, применяют асинхронные двигатели с фазным ротором (рис. 170, г). У этих двигателей на роторе размещают такую же обмотку, как и на статоре. При этом концы обмоток соединяют с контактными кольцами (рис. 170, д), расположенными на валу двигателя. Контактные кольца при помощи щеток соединяются с пусковым реостатом.
Для пуска двигателя в питающую цепь включают статор, после чего постепенно выводят из цепи ротора сопротивление пускового реостата. Когда двигатель пущен, контактные кольца при помощи контактов пускателя замыкаются накоротко,

Продольный разрез асинхронного электродвигателя с фазным ротором
На рис. 171 показан продольный разрез асинхронного двигателя с фазным ротором. В корпусе 6 статора помещена обмотка 5, уложенная в пазы 4 стали статора. В пазах 2 стали ротора лежит обмотка 3 ротора.
Пуск в ход электродвигателя с короткозамкнутым ротором может быть осуществлен непосредственным включением пускателя па полное рабочее напряжение цепи (способ прямого пуска). Однако вследствие резкого возрастания индуктируемой э. д. с. и пускового тока напряжение в цели в пусковой момент снижается, что отрицательно сказывается на работе приводного двигателя и других потребителей, питающихся от этой цепи.
В случае большого пускового тока для его уменьшения асинхронные двигатели с короткозамкнутым ротором обычно пускают двумя способами: переключением обмоток статора в момент пуска со звезды на треугольник, если обмотки статора при нормальной работе электродвигателя соединены треугольником, или включением электродвигателя через пусковой реостат (или автотрансформатор) в цепи статора.
Остановка электродвигателя производится выключением контактора. После остановки электродвигателя пусковой реостат или автотрансформатор полностью вводится. Частоту вращения асинхронных двигателей регулируют, изменяя сопротивление реостата, включенного в цепь ротора (у электродвигателей с фазным ротором), и переключая статорные обмотки для изменения числа пар полюсов (у электродвигателей с короткозамкнутым ротором).
Изменение направления вращения асинхронных электродвигателей достигается изменением направления вращающегося магнитного поля статора путем переключения любых двух из трех фаз обмотки статора (с помощью проводов, соединяющих зажимы статорной обмотки с цепью) при помощи обычного двухполюсного переключателя.
Асинхронные двигатели просты по конструкции, обладают по сравнению с двигателями постоянного тока меньшими размерами и массой, вследствие чего они значительно дешевле. Кроме того, они более надежны в эксплуатации, требуют меньшего внимания при обслуживании из-за отсутствия у них вращающегося коллектора и щеточного аппарата; они обладают более высоким к. п. д., аппаратура управления ими значительно проще и дешевле, чем у двигателей постоянного тока. Асинхронные двигатели работают без искрообразования, которое возможно в машинах постоянного тока с нарушенной коммутацией, поэтому они более безопасны в пожарном отношении.
Перечисленными основными преимуществами асинхронных двигателей объясняется современная тенденция повсеместного внедрения переменного тока на морских судах. Следует отметить, что в промышленности асинхронные двигатели давно завоевали господствующее положение по сравнению с другими типами электродвигателей.
Асинхронные двигатели строятся мощностью от долей киловатта до многих тысяч киловатт. На судах морского флота в основном применяются асинхронные двигатели с короткозамкнутым ротором, которые выпускаются в водозащищенном и брызгозащищенном исполнении и рассчитаны па напряжение 380/220 В.
Контрольные вопросы:
1. В чем заключается принцип действия генератора постоянного тока?
2. Из каких основных частей состоит электрическая машина постоянного тока и каково их назначение?
3. Как разделяются машины постоянного тока по исполнению?
4. Каков принцип действия двигателя постоянного тока?
5. Каковы основные правила обслуживания электрических машин постоянного тока?
6. Какие машины называются синхронными и каков принцип их действия?
7. Для чего служат трансформаторы, каковы их устройство и принцип действия?
8. Какие двигатели называются асинхронными и каков принцип их действия?
9. Как подразделяются асинхронные двигатели по конструкции ротора?
ЭЛЕКТРООБОРУДОВАНИЕ СУДОВ
Электрооборудование судна предназначено для обеспечения управления , радиосвязи , работы радиолокационных станций, условий обитаемости судна.
Электрооборудование — любого судна состоит из четырех обязательных элементов (рис. 1) — источников электроэнергии; распределительных устройств (распределительные щиты, управления электроустановками); электрических сетей; потребителей электроэнергии.
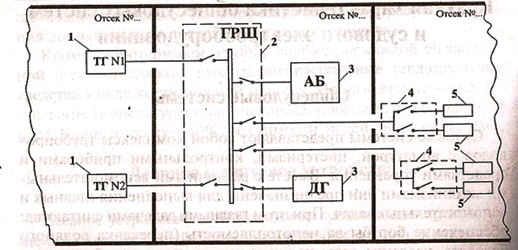
Рис. 1. Электроэнергетическая система судна (вариант): 1- основные (главные) турбогенераторы; 2- главный распределительный шит; 3 — резервные источники питания; 4 — групповые распределительные шиты; # 5 — потребители электроэнергии