Виды, устройство и принцип работы дифференциала
Дифференциал – это механизм трансмиссии, распределяющий подводимый к нему крутящий момент между приводными валами и позволяющий колесам вращаться с разными угловыми скоростями. Особенно это заметно, когда машина проходит поворот. Дифференциал обеспечивает безопасное и комфортное вождение на сухой дороге с твердым покрытием. Однако если автомобиль покинет ее пределы и продолжит двигаться по пересеченной местности, а также в случае гололеда (и других тяжелых погодных условий) этот механизм может лишить автомобиль возможности передвигаться. О том, что такое дифференциал, как он устроен, в чем его вред для внедорожников и как с этим бороться – пойдет речь ниже.
Дифференциал как часть трансмиссии
Дифференциал в автомобиле — это механизм, распределяющий крутящий момент карданного вала трансмиссии между ведущими колесами передней или задней оси (в зависимости от типа привода), позволяя каждому из них вращаться без пробуксовки. В этом заключается основное назначение дифференциала.
 Ведуший мост с дифференциалом в разрезе
Ведуший мост с дифференциалом в разрезе
При прямолинейном движении, когда колеса нагружены одинаково и имеют равную угловую скорость вращения – механизм работает в качестве передаточного звена. Если условия движения изменяются (поворот, пробуксовка) – нагрузка становится неравномерной. У полуосей появляется необходимость вращаться с разными скоростями, и, как следствие, становится необходимым распределить полученный крутящий момент между ними в определенном соотношении. Тогда узел выполняет вторую важную функцию: обеспечение безопасного маневрирования автомобиля.
Схема расположения дифференциала зависит от типа привода автомобиля:
- Передний привод – картер коробки передач.
- Задний привод – корпус ведущего моста.
- Полный привод – корпусы переднего и заднего мостов (для передачи крутящего момента ведущим колесам) или раздаточная коробка (для передачи крутящего момента ведущим мостам).
Дифференциал на автомобилях появился не сразу. Конструкторы первых «самодвижущихся экипажей» были очень озадачены плохой маневренностью своих изобретений. Вращение колёс с одинаковой угловой скоростью во время прохождения поворота приводило к тому, что одно из них начинало буксовать или, наоборот, полностью теряло контакт с дорогой. Инженеры вспомнили, что на ранних прототипах первых автомобилей, снабжаемых паровыми двигателями, было устройство, позволявшее избежать потери управляемости.
Механизм распределения вращающего момента изобрёл француз Онесифор Пеккёр. В устройстве Пеккёра присутствовали валы и шестерни. Через них крутящий момент от мотора поступал к ведущим колёсам. Но даже после применения изобретения Пёккера проблема пробуксовки колёс на поворотах не решилась полностью. Выявились недостатки системы. Например, одно из колес в какой-то момент терял сцепление с дорогой. Сильнее всего это проявлялось на обледенелых участках.
Пробуксовка в таких условиях часто приводила к авариям, поэтому конструкторы надолго задумались над тем, как предотвратить занос машины. Решение было найдено Фердинандом Порше. Он стал изобретателем кулачкового механизма, который ограничивал проскальзывание колёс ведущего моста. Немецкое устройство дифференциала нашло применение в автомобилях Volkswagen.
Как устроен дифференциал
Узел работает как планетарный редуктор. Принципиальное устройство дифференциала: шестерни полуосей (5) и сателлитов (4) размещены в чашке (3). Чашка (корпус) жестко соединена с ведомой шестерней (2), которая принимает крутящий момент от ведущей шестерни главной передачи (1). Корпус передает вращение посредством сателлитов полуосям, вращающим ведущие колеса. Разные угловые скорости обеспечиваются благодаря работе сателлитов. Величина крутящего момента остается неизменной.
Применение дифференциалов в зависимости от их видов
Устройства используют для передачи крутящего момента ведущим колесам и ведущим мостам автомобиля .
Грузовики и легковые автомобили всех типов приводов имеют межколесный дифференциал, передающий вращение колесам. Межосевой дифференциал, распределяющий крутящий момент между мостами, применяют исключительно в полноприводных машинах.
По типу применяемой зубчатой передачи различают следующие виды механизмов:
По количеству зубьев шестерен полуосей:
Благодаря его свойству пропорционально распределять крутящий момент несимметричный дифференциал с цилиндрической передачей устанавливают между мостами полноприводных автомобилей.
Заднеприводные и переднеприводные автомобили оснащают коническим симметричным дифференциалом.
Червячная передача, являясь самой универсальной, используется во всех типах устройств со всеми приводами.
Схема работы дифференциала
Рассмотрим принцип, по которому работает симметричный межколесный конический дифференциал, распределяющий крутящий момент между колесами в трех различных условиях:
- прямолинейное движение;
- поворот;
- пробуксовка.
При прямолинейном движении
Прямолинейное движение характеризуется равномерным распределением нагрузки между колесами автомобиля. Они имеют одинаковую угловую скорость. Сателлиты, размещенные в корпусе, не вращаются вокруг своих осей. Они передают крутящий момент от ведомой шестерни главной передачи к полуосям через неподвижное зубчатое зацепление.
 Работа дифференциала при повороте и прямолинейном движении
Работа дифференциала при повороте и прямолинейном движении
При повороте
Когда транспортное средство поворачивает, силы сопротивления и нагрузки распределяются следующим образом:
- Внутреннее колесо, имеющее меньший радиус от центра поворота, испытывает сопротивление большей силы, чем наружное. Увеличенная нагрузка заставляет его снизить скорость вращения.
- Наружное колесо, двигаясь по большему радиусу (большей траектории), наоборот, должно увеличить угловую скорость, чтобы автомобиль мог повернуть плавно, без пробуксовки.
Таким образом, колеса должны иметь разные угловые скорости. Замедление вращения полуоси внутреннего колеса приводит сателлиты в движение. Они, в свою очередь, посредством конической зубчатой передачи увеличивают скорость вращения полуоси наружного колеса. Крутящий момент, получаемый от главной передачи, остается неизменным.
При пробуксовке
Колеса автомобиля, движущегося даже прямолинейно по скользкой дороге или бездорожью, могут испытывать различную нагрузку: одно из них пробуксовывает, теряя сцепление с дорогой; другое, становясь более нагруженным, замедляется. Повторяется схема поворота. Только теперь она приносит вред: буксующее колесо может получить 100% принятого дифференциалом крутящего момента, а нагруженное вообще перестанет вращаться. Движение автомобиля прекратится.
Эти недостатки работы узла решаются различными способами:
- ручной или автоматической блокировкой;
- внедрением системы курсовой устойчивости.
Блокировка дифференциала и система курсовой устойчивости
Чтобы крутящий момент полуосей снова стал одинаковым, нужно блокировать действие сателлитов или обеспечить его передачу от чашки на нагруженную полуось.
Это особенно актуально для машин повышенной проходимости, имеющих полный привод 4Х4. Не только потому что они предназначены для езды по местности с тяжелыми дорожными условиями. Стоит машине, оснащенной тремя дифференциалами (два межколесных, один межосевой), хотя бы в одной из четырех точек потерять сцепление – величина крутящего момента остальных колес устремится к нулевому значению, и машина откажется ехать.
Избежать неприятностей помогает блокировка, которая может быть либо частичной, либо полной (зависит от степени перераспределения усилий между полуосями), а также либо ручной, либо автоматической (зависит от степени контроля со стороны водителя).
Хорошо себя зарекомендовали самоблокирующиеся дифференциалы, распределяющие крутящий момент, учитывая его разность на полуосях или исходя из значений угловых скоростей.
Наиболее сложным совершенным способом устранить недостатки узла является электронная блокировка, реализуемая на базе системы курсовой устойчивости, датчики которой контролирует все необходимые параметры во время движения автомобиля. На основе полученных данных работа автомобиля корректируется автоматически.
Безопасность прежде всего
Дифференциал создан для обеспечения безопасного комфортного маневрирования на трассе. Описанные выше недостатки касаются езды в экстремальных условиях, а также по пересеченной местности. Поэтому если на автомобиле установлен привод ручной блокировки, использовать его нужно исключительно в соответствующих дорожных условиях. А шоссейные автомобили, которые сложно «уговорить» ехать медленнее 100 км/час, эксплуатировать без дифференциала вообще невозможно и даже опасно. Такой вот нехитрый, но бесконечно важный механизм в трансмиссии.
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
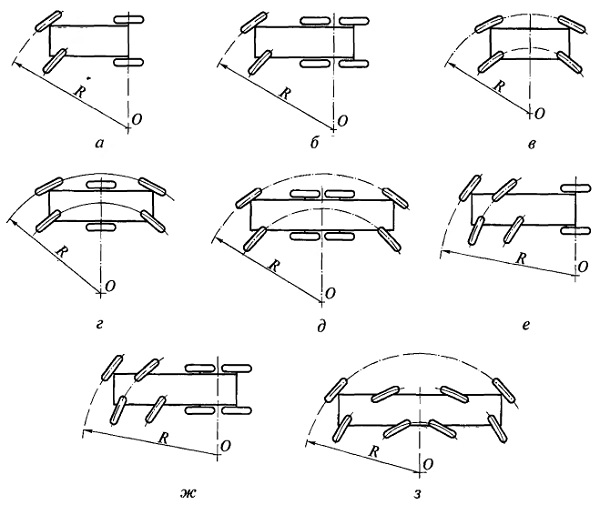
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
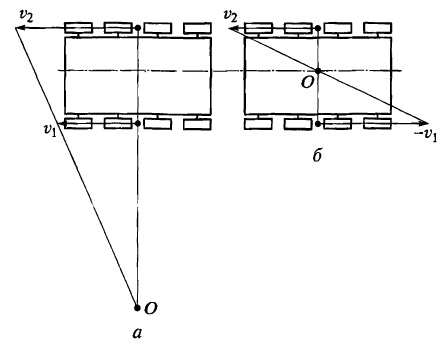
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Способы поворота и принцип работы рулевого управления тракторов и автомобилей
Управляемость машины это способность ее двигаться точно по задаваемой траектории при условии минимальных физических и психологических нагрузок на водителя. Понятие управляемости включает в себя свойства курсовой устойчивости (способность изменять направление движения по заданной траектории при соответствующем воздействии на орган управления).
Существуют следующие способы поворота колесных тракторов и автомобилей:
- поворот всех колес или только передних управляемых
- излом шарнирно-сочлененной рамы машины
- создание разности вращающих моментов на ведущих колесах
- бортовой способ поворота по принципу гусеничных машин
- комбинированный способ, сочетающий первый и третий способы поворота
Автомобили и большинство тракторов поворачивают, изменяя направление движения передних колес, а тракторы Т-150К, К-701 — в результате поворота одной части рамы относительно другой вокруг соединяющего их вертикального шарнира.
Рулевое управление классифицируют по следующим признакам:
- по расположению на машине — с левым или правым расположением
- по конструкции рулевого механизма — червячные, реечные, кривошипно-винтовые, комбинированные и др.
- по конструктивным особенностям рулевого привода — привод к управляемым колесам и управляемым осям или к складывающимся полурамам
Рулевое управление должно быть легким и удобным, для чего усилие на рулевом колесе и угол его поворота должны быть ограниченными. Кроме того, необходимо, чтобы рулевое управление обеспечивало правильную кинематику поворота и безопасность движения, а поворот колес происходил так, чтобы их качение не вызывало проскальзывания. Это обеспечивается соединением рулевого управления в форме трапеции.
К рулевому управлению предъявляют следующие требования:
- Обеспечение высокой маневренности, при которой возможны крутые и быстрые повороты на сравнительно ограниченных площадях.
- Легкость управления, оцениваемая усилием, прилагаемым к рулевому колесу.
- Высокая степень надежности действия, поскольку выход рулевого управления из строя в большинстве случаев заканчивается аварией или катастрофой.
- Правильная кинематика поворота, при которой колеса всех осей автомобиля катятся по концентрическим окружностям (невыполнение этого требования приводит к скольжению шин по дороге, интенсивному их изнашиванию, излишним расходам мощности двигателя и топлива).
- Умеренное ощущение толчков на рулевом колесе при езде по плохим дорогам, что снижает безопасность движения.
- Точность следящего действия, в первую очередь кинематического, при котором любому заданному положению рулевого колеса будет соответствовать вполне определенная заранее рассчитанная крутизна поворота.
- Отсутствие в рулевом управлении больших зазоров, приводящих к плохому держанию автомобилем дороги, к его вилянию.
Рулевое управление машины с передними управляемыми колесами состоит из переднего моста, трапеции управления, рулевого привода и рулевого механизма (рисунок а). Передние колеса устанавливают на цапфах 13, соединенных с передней осью шкворнями. Все это образует передний мост.
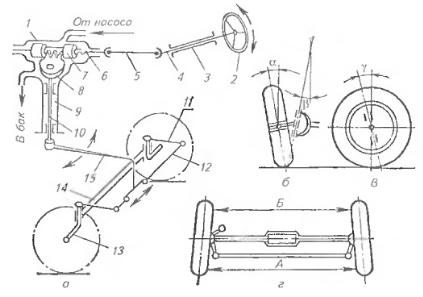
Рисунок. Схемы рулевого управления и установки передних колес: а — схема рулевого управления: 1 — гидроусилитель; 2 — рулевое колесо; 3 — рулевая колонка; 4 — вал рулевого механизма; 5 — карданная передача; 6 — винт гидроусилителя; 7 — поршень-рейка; 8 — зубчатый сектор; 9 — стойки; 10- вал сошки; 11 — поворотный рычаг; 12 — поперечная тяга; 13 — поворотная цапфа; 14 — передняя ось; 15 — рулевая сошка; б — развал колес и поперечный наклон шкворня; в — продольный наклон шкворня; г — схождение колес
На цапфах закреплены рычаги 11, связанные шарнирно с поперечными тягами 12, Рычаги 11 и поперечные тяги 12 с передней осью 14 составляют трапецию управления, предназначенную для поворота колес.
Тяги 22 соединены с рулевой сошкой 15, сидящей на валу 10 с закрепленным на нем зубчатым сектором 8. Рулевая сошка и вал 10 образуют рулевой привод, передающий усилие от сошки к поворотным цапфам.
Зубчатый сектор 8 находится в зацеплении с поршнем-рейкой 7, укрепленной на винте 6 гидроусилителя, и образует рулевой механизм. Действие рулевого механизма облегчается гидравлическим усилителем. Усилие к рулевому механизму передается от рулевого колеса 2, сидящего на валу 4, через карданную передачу 5 на винт 6.
В рулевых механизмах применяют передачи типа червяк ролик, червяк — сектор, червяк — червячная шестерня и др. Передачи первого типа наиболее распространены в рулевых механизмах тракторов и грузовых автомобилей.
На отечественных автомобилях принято левое (по ходу) рулевое управление, обеспечивающее лучший обзор. У тракторов рулевое управление расположено справа, благодаря чему создаются условия для лучшего наблюдения за работой агрегата и более точного его вождения при выполнении ряда технологических операций (пахота, косьба и т. д.).
С целью облегчения управления трактором или автомобилем применяют усилители рулевого управления преимущественно гидравлического типа (в тракторах К-701, Т-150К, МТЗ-80, ЛТЗ-55, в автомобиле ЗИЛ-130).
Управляемые (направляющие) колеса трактора (автомобиля) должны быть установлены правильно, чтобы износы шин и затраты мощности на качение были наименьшими, устойчивость — хорошей, а управление — легким. Установка управляемых (передних) колес характеризуется их развалом в вертикальной плоскости и схождением в горизонтальной, а также наклоном шкворней поворотных цапф в продольной и поперечной плоскостях.
Развал колес (рисунок б) определяется установкой цапф колес с наклоном их шипов вниз. Это позволяет уменьшить нагрузки на внешний подшипник и улучшить управляемость. Угол развала колес различных машин а