Когда машина выполняет поворот колеса одной оси
Проскальзывание колёс автомобиля относительно дорожного полотна грозит потерей управления. Чтобы избежать этого, при повороте автомобиля углы поворота передних колёс в каждый момент должны быть согласованными — продолжения их осей должны пересекаться в точке на линии задней оси. Точка пересечения осевых линий колёс является мгновенным центром поворота автомобиля, т. е. точкой, вокруг которой катятся (а не скользят!) все четыре колеса, каждое — по своей окружности.
Первый механизм «согласования» поворотов передних колёс, основанный на использовании шарнирной равнобочной трапеции, придумал французский каретный мастер Шарль Жанто. Но его изобретение было забыто, поскольку с тягой в несколько лошадиных сил кареты двигались не быстро и проскальзывание колёс не было столь важным.
Лишь через три четверти века два отца автомобилестроения Готтлиб Даймлер и Карл Бенц, создавая свои автомобили, возвращаются к трапеции Жанто. В 1889 году Даймлер получает патент на «способ независимого управления передними колёсами с разновеликими радиусами поворота». А в 1893 году Бенц получает патент на «устройство управления экипажей с тангенциальными к колёсам окружностями управления». С тех пор трапеция «управляет» автомобилем.
Конечно, за это время техника усложнилась. У большинства современных машин колёса ходят по высоте относительно друг друга, поэтому для управления ими плоский шарнирный механизм (трапеция) уже не подходит. Однако и в наши дни механизм, поворачивающий передние колёса автомобиля, называется рулевой трапецией.
Современные конструкторы научились поворачивать и задние колёса автомобиля, эта возможность реализована в некоторых моделях. По сравнению с описанной классической схемой, у автомобиля с функцией согласованного поворота всех четырёх колёс существенно уменьшается минимальный радиус поворота.
Рассматривая поведение колёс автомобиля при повороте, нельзя не отметить ещё одну проблему геометрического толка.
При повороте колёса на одной оси катятся по дугам окружностей разных радиусов, поэтому должны отличаться и пройденные ими пути.
В изображённой на первом рисунке ситуации у автомобиля ведущая ось — задняя, передние колёса независимы и будут свободно крутиться, каждое со своей скоростью.
А вот задние колёса — колёса ведущей оси. Их обязанность — толкать автомобиль вперёд. И в то же время разность путей, пройденных ими при повороте, означает, что вращаться эти колёса должны с разными скоростями.
Сделать так, чтобы ведущие колёса могли подстраиваться под проходимый ими путь (как и их «свободные» коллеги — передние колёса), удаётся при помощи механизма, который называется дифференциал. Дифференциал, в полном соответствии со своим названием, раздаёт вращательное движение карданного вала на полуоси ведущей оси так, что они могут вращаться с разными скоростями!
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
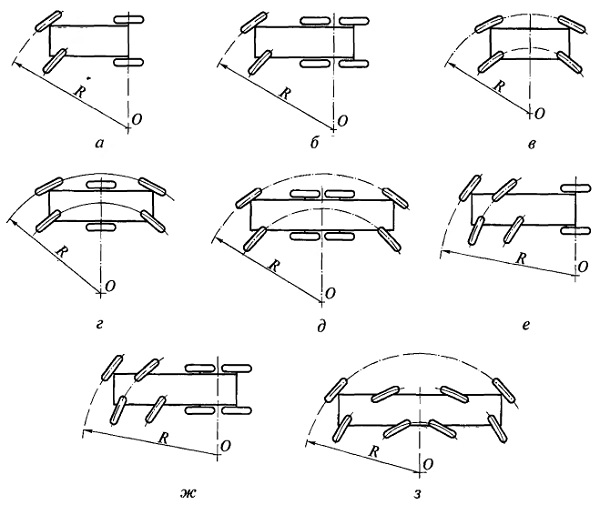
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
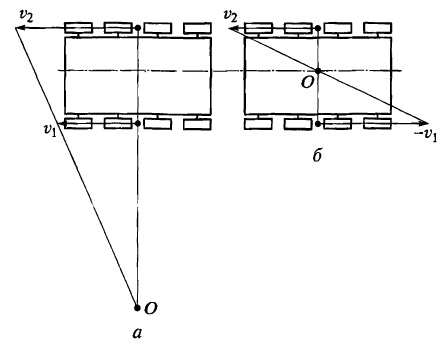
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
ОСТОРОЖНО, ПОВОРОТ!
Кандидат технических наук Д. ЗЫКОВ.
У каждой машины свой характер, порой очень капризный. Чаще всего он проявляется при прохождении поворотов на высокой скорости. Один автомобиль точно “слушается” руля, другой “сопротивляется”, третий стремится повернуть больше, чем надо. Характер автомобиля выражается еще и в том, как быстро он реагирует на управляющее воздействие — немедленно или с небольшим запаздыванием. Словом, ответная реакция автомобиля не всегда адекватна действиям водителя.
Если при повороте управляемых колес одно из них (или оба) начинает проскальзывать, автомобиль перестает “слушаться” руля и сходит с намеченной траектории. Чаще всего он продолжает двигаться по касательной к ней или попадает в занос (задняя ось как бы обгоняет переднюю). Может произойти и потеря курсовой устойчивости, тогда машина начинает “рыскать” на дороге, и ее приходится “ловить” (постоянно подруливать).
Для практической езды очень важен и такой фактор, как боковой увод шин. Если все колеса одинаковые, то траектория поворота при боковом уводе не меняется, хотя и смещается вперед. В том случае, если боковой увод задних колес больше, чем передних, радиус поворота уменьшается, а это при резких маневрах может привести к заносу и даже к потере управляемости. Если же боковой увод больше у передних колес, то радиус поворота увеличивается (рис. 1, 2). Это тоже опасно, но потеря контроля над машиной маловероятна. Чтобы избежать подобных неприятностей, нужно ставить на автомобиль одинаковые колеса. В крайнем случае разные колеса могут быть на передней и задней оси, но на одной оси оба колеса должны быть одинаковые. Кстати, радиальные шины, у которых в боковом направлении каркас жестче, чем у диагональных, менее склонны к боковому уводу. В любом случае увод будет тем меньше, чем выше давление воздуха в шинах, поэтому в задних колесах оно должно быть на 0,1-0,2 кг/см 2 больше, чем в передних.
Чтобы стабилизировать управляемые колеса, обеспечить их минимальное сопротивление качению и хорошую управляемость автомобиля, нужно их правильно установить. Установка управляемых колес задается углами поперечного и продольного наклона шкворневой оси (ее еще называют осью поворота), углом развала и величиной схождения. Увеличение углов наклона оси поворота заставляет автомобиль быстрее и четче реагировать на повороты рулевого колеса. Угол развала стабилизирует колеса в продольном направлении. Чем он больше, тем выше приподнимается передняя часть машины при повороте колес и тем быстрее она возвращается в исходное положение под действием собственного веса.
В переднеприводных автомобилях ведущие колеса при движении стремятся к схождению, а в автомобилях классической схемы — к расхождению, поэтому величины схождения у них разные: в переднеприводных (ВАЗ-2108,
-2109) — +1 мм, в заднеприводных (ВАЗ-2101 — ВАЗ-2107) — 2-4 мм. Правильная установка углов развала и схождения колес важна не только для улучшения управляемости автомобиля, но и для продления срока службы шин: если углы установлены неверно, шины быстрее и неравномерно изнашиваются.
Углы установки колес проверяют и регулируют не часто, в основном после замены резино-металлических шарниров рычагов и самих рычагов передней подвески, амортизаторных стоек, деталей рулевого механизма, включая рычаги, тяги и поворотные кулаки. После такого ремонта нужно отрегулировать все углы на станции техобслуживания.
Если же в дороге погнется рычаг подвески или рулевая тяга, придется проделать эту работу самостоятельно. Отрегулировать в полевых условиях углы наклона шкворневой оси практически невозможно. А углы развала и схождение колес поддаются проверке и установке и без стенда, правда, дело это трудоемкое. Прежде всего, нужно запастись тонкой, прочной веревкой длиной около 4 метров, грузиком, например гайкой, двумя стандартными спичечными коробками и двумя монетами достоинством 1 рубль (у них толщина 1,5 мм) — вот и все измерительные инструменты.
Для проверки угла развала колес привяжите гайку к веревке — получится отвес. Один спичечный коробок приоткройте и вставьте в отверстие вертикально две монеты, тогда он не закроется и станет на 3 мм длиннее. Перед началом работы постарайтесь поставить машину горизонтально. Приложите пустой коробок к середине боковой поверхности покрышки в верхней части колеса и прислоните к торцу коробка отвес. Другой коробок (с рублями) прижмите к покрышке в нижней части колеса. Если шнур отвеса касается нижнего коробка или проходит от него на расстоянии 2-3 мм (в ту или другую сторону), то регулировать угол развала не нужно (рис. 3). Если же шнур отходит от коробка дальше, угол развала следует установить, воспользовав шись руководством по эксплуатации.
Чтобы проконтролировать схождение колес, зацепите веревку за детали передней подвески и обведите ее спереди вокруг переднего колеса на уровне оси. Затем, туго натягивая, подведите веревку к заднему колесу, на котором также на уровне оси приложите плашмя два сложенных лицевыми поверхностями спичечных коробка (рис. 4). Если веревка одновременно коснется боковины передней покрышки и коробков на задней, то ехать можно. Если веревка, коснувшись боковины передней покрышки, к коробкам на заднем колесе не прилегает, то схождение нужно уменьшить, а если прилегает к коробкам, но не касается передней покрышки, колеса нужно свести. Работе могут помешать выпуклые декоративные колпаки, тогда снимите их или проводите измерения на 5-8 см выше либо ниже оси.
Такой приблизительный метод измерения поможет вовремя подкорректировать установку колес, чтобы не “сжевать” покрышки до конца пути. Точно отрегулировать углы развала и схождение управляемых колес можно только на станции техобслуживания.
Раймпель Й. Шасси автомобиля. Рулевое управление. М.: Машиностроение, 1987.
Цыбин В. С., Галашин В. А. Легковые автомобили . М.: Просвещение, 1996.
Колеса и шины. Краткий справочник. М.: За рулем, 1997.
Повороты автомобиля
Изменение направления движения автомобиля достигается поворачиванием передних колес влево или вправо при помощи рулевого управления.
Для того чтобы при движении автомобиля на повороте колеса его имели качение без скольжения, они должны катиться по окружностям, описанным из одного центра — центра поворота, лежащего в точке О, на линии задней оси автомобиля. В результате при повороте колеса автомобиля описывают окружности разного радиуса: передние колеса, описывают окружность большего радиуса, чем задние.
Безопасность движения на закруглениях пути (поворотах) определяется следующими условиями.
Когда автомобиль движется по окружности, возникает центростремительная сила, удерживающая автомобиль на окружности, и центробежная сила, стремящаяся отбросить автомобиль от центра вращения.
Величина центробежной силы непостоянна и зависит от массы автомобиля, радиуса поворота и скорости движения.
Чем больше масса автомобиля, тем больше его инерция, а следовательно, и центростремительная сила. Это, в свою очередь, вызывает увеличение центробежной силы, которая равна и противоположна центростремительной. Таким образом, между весом автомобиля (массой) и центробежной силой существует прямая пропорциональная зависимость. Это означает, что величина центробежной силы увеличивается во столько же раз, во сколько раз увеличивается масса. Если вес автомобиля возрастет в два раза, то и центробежная сила увеличится в два раза, и т. д.
Между центробежной силой и радиусом поворота зависимость обратно пропорциональная: при увеличении радиуса поворота величина центробежной силы уменьшается. И, наоборот, во сколько раз меньше угол поворота, во столько раз больше центробежная сила.
При увеличении скорости движения центробежная сила возрастает, но не в простой зависимости, а в квадратной, т. е. так же, как в зависимости от скорости движения возрастает тормозной путь автомобиля. Если скорость движения автомобиля возрастет в два раза, величина центробежной силы возрастет в четыре раза, при возрастании скорости в три раза центробежная сила увеличится в девять раз и т. д.
Опасность увеличения центробежной силы состоит в том, что, стремясь отбросить автомобиль с окружности, она может вызвать боковой занос на повороте. При всех возможных случаях бокового скольжения занос автомобиля на повороте является наиболее опасным по следующим причинам: занос на повороте, как правило, вызывает скольжение задней оси, что опаснее заноса передней оси; вывести автомобиль из заноса на повороте труднее из-за ограниченного пространства.

Рис. Схема поворота автомобиля передним ходом
Занос на повороте опасен еще и тем, что чаще всего вызывает опрокидывание автомобиля, особенно при высокорасположенном центре тяжести, например при высокой укладке груза. Достаточно колесу при боковом скольжении встретить препятствие — камень, колею, канаву, как центробежная сила, приложенная к центру тяжести автомобиля, опрокинет автомобиль через это колесо.
Из сказанного должно быть понятно, что вероятность бокового заноса на повороте тем больше, чем выше скорость движения, больше вес автомобиля, меньше (круче) угол поворота, хуже сцепление колес с дорогой (когда центробежная сила может превысить центростремительную силу — силу трения).
Наиболее верным средством предупреждения опасности бокового заноса при повороте является снижение скорости движения. Прибегать к торможению на повороте ии в коем случае нельзя, так как вследствие реакции торможения уменьшается сцепление колес с поверхностью дороги, что облегчает возникновение заноса (торможение на повороте ухудшает устойчивость автомобиля).
При возникновении бокового заноса на повороте надо иметь в виду следующее: если при боковом скольжении задней оси автомобиля на прямой дороге водитель прекращает занос поворотом руля в сторону заноса, то на повороте этим способом автомобиль может попасть в придорожную канаву. Поэтому, не теряя присугствия духа, надо попытаться вывести автомобиль из бокового заноса на повороте сильной подачей горючей смеси, направляя колеса по оси движения, т. е. в нужном направлении. Можно сказать с уверенностью, что, если это произойдет во второй половине поворота, когда колеса начинают поворачиваться на прямую дорогу, своевременная подача горючей смеси даст возможность вывести автомобиль из заноса.
Приближаясь к повороту, водитель должен рассчитать, с какой скоростью можно пройти поворот. Чем круче поворот, хуже сцепление колес с дорогой (мокрая, скользкая дорога), больше вес автомобиля, выше расположен центр тяжести машины, тем меньше должна быть скорость автомобиля.
Правила безопасности движения обязывают водителя при приближении к закруглениям дороги заблаговременно снижать скорость и на поворотах двигаться на пониженной скорости.
Приведенные положения водитель должен хорошо знать и твердо запомнить, чтобы, двигаясь на поворотах, не создавать опасности несчастного случая, аварии, поломки автомобиля.
При поворотах на большой угол надо помнить, что автомобиль при повороте занимает больше места, чем при движении в прямом направлении. Поэтому, особенно при поворотах в левую сторону, надо не затягивать поворот и не мешать проезду другого транспорта. Радиус поворота передних колес должен быть настолько большим, чтобы задние колеса, поворачивающиеся по дуге меньшего радиуса, не наехали на препятствие.
Поворот будет совершен технически правильно, если задние колеса при повороте в правую сторону пройдут на одинаковом расстоянии от закругления дороги, а при повороте в левую сторону — от центра поворота.
В целях безопасности движения нужно заблаговременно (за 100—120 м) предупреждать о повороте включением указателей поворота, а при отсутствии указателей — рукой или открыванием дверцы кабины.

Рис. Схема движения колес автомобиля при объезде препятствия передним ходом: А — правильно; Б — неправильно
Изучая технику изменения направления движения автомобиля, следует отличать повороты односторонние от поворотов двойных.
Односторонние повороты применяются во всех случаях, когда требуется изменить направление движения автомобиля. Двойной поворот служит лишь для объезда препятствия или движения между препятствиями, для объезда пешехода, идущего по дороге, и с изменением основного направления движения не связан.
Поворачивание рулевого колеса производится следующим образом.
Если необходимо повернуть автомобиль на большой угол (90°, 180″, 360°), водитель энергично перебирает рулевое колесо, пока не будет достигнуто требуемое направление. После этого, не давая автомобилю уклоняться в сторону, выравнивает руль по оси движения. Таким приемом водитель до-стигает плавности и равномерности поворота.

Рис. Схема двойного поворота рулевого колеса (влево-вправо): А — начало поворота; Б — окончание поворота
При поворотах на небольшой угол, а также при двойных поворотах водитель перемещает руки вместе с рулевым колесом, но при этом он должен избегать перекрещивания рук, что может затруднить управление и привести к аварии.

Рис. Перекрещивание рук на рулевом колесе при двойном повороте (неправильный прием)
Очень важно выработать привычку перед самым поворотом быстро осматриваться назад и в сторону поворота, а перед поворотом в левую сторону, пользуясь зеркалом заднего вида, просматривать дорогу позади автомобиля.
Ни в коем случае нельзя поворачивать передние колеса рулевым колесом при неподвижном автомобиле, так как это приводит к чрезмерным, вредным напряжениям в механизме рулевого управления.