Назначение рулевого управления. Способы поворота автомобиля

Поскольку орган управления — рулевое колесо — постоянно находится в руках водителя, оно на современных автомобилях выполняет также информационную функцию — по усилиям, вибрациям на рулевом колесе происходит передача водителю информации о состоянии дорожного покрытия, нагруженности контакта колес с дорогой.
Рулевое управление автомобиля должно обеспечивать ощущаемую водителем связь между углом поворота рулевого колеса и направлением движения автомобиля, обладать высокой надежностью. Усилия, необходимые для управления, не должны приводить к повышенной утомляемости водителя и в тоже время должны информировать его о состоянии контакта управляемых колес с дорогой (обеспечивать «чувство дороги»). От рулевого управления зависит минимальный радиус поворота автомобиля на ограниченных площадях. Конструкция рулевого управления не должна передавать ударные нагрузки от неровностей дороги на руки водителя.
Все перечисленные выше требования учитываются при проектировании рулевого управления.
Изменить направление движения автомобиля можно двумя различными способами: за счет поворота колес или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счет создания на колесах правого и левого борта различных по величине или по направлению продольных сил (силовой способ) (г).
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путем: — поворота управляемой оси (а);
— поворота управляемых колес (б);
— поворота сочлененных звеньев (складывания рамы) (в).
Поворот управляемой оси — это наиболее старый из известных способов управления. Он применялся еще на двухосных гужевых повозках. При таком способе ось с колесами поворачивалась относительно шкворня, установленного в центре повозки. Система управления получалась очень простой, но требовала сильного сужения передней части кузова для перекатывания управляемых колес, не обеспечивала демпфирования ударов от неровностей дороги на органы управления и при предельных углах поворота оси возникала опасность бокового опрокидывания из-за уменьшения площади опоры автомобиля.
Для частичного устранения указанных недостатков пытались заменить управляемую ось одним колесом, установленным по центру автомобиля (например, автомобиль К. Бенца). В настоящее время такая схема поворота осталась на двух- и трехколесных транспортных средствах. Поворот управляемой оси сегодня применяется только на прицепах.
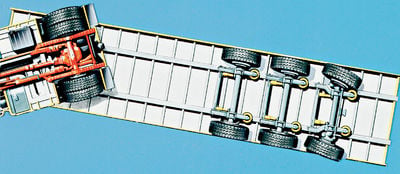
Принцип управления за счет поворота сочлененных звеньев применяется в случае, когда колеса транспортного средства имеют большие размеры и поворот каждого из них затруднен. Несущая система транспортного средства состоит из двух частей, к каждой из которой присоединена передняя и задняя оси. Обе части соединены друг с другом подвижно с помощью вертикального шкворня. Относительный поворот частей («складывание» рамы или иной несущей системы) происходит с помощью гидравлических цилиндров рулевого управления. К недостаткам данной схемы относится низкая точность управления при высокой скорости, трудность размещения кузовов или кабин на двух подвижных частях рамы, усложнение трансмиссии. В связи с этим данный способ рулевого управления на современных автомобилях применяется редко, основная сфера использования — тихоходные тракторы, дорожно-строительные машины, специальные вездеходы и т. п.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колесами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации поворота правого и левого колеса одной оси они связаны шарнирным механизмом — рулевой трапецией.
Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания.
Основные преимущества указанной схемы поворота: колеса занимают при поворотах небольшой объем внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля (двигатель, трансмиссию и т. д.); для поворота колес требуются незначительные усилия, близкое расположение колеса к оси его поворота уменьшает удары, передающиеся от дороги на рулевое управление.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колесами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колесами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высокой скорости. Поэтому на автотранспортных средствах с передними и задними управляемыми колесами при движении с высокими скоростями принудительное управление задними колесами отключают, а колеса фиксируются в нейтральном положении.
Для современных скоростных легковых автомобилей конструкция подвески задних неуправляемых колес и наличие упругих резинометаллических шарниров крепления рычагов к несущей системе (эластокинематика подвески) обеспечивает при движении на повороте незначительные углы поворота колес из-за крена кузова и действия на колеса боковых сил. Это явление называется «доворотом» неуправляемых колес и при правильно спроектированной подвеске позволяет улучшить управляемость в скоростных поворотах.
Одну ось с управляемыми колесами могут иметь и трехосные автомобили, но при условии, что вторая и третья неуправляемые оси сближены. Если эти оси разнесены или автомобиль имеет более трех осей, то для предотвращения бокового проскальзывания колес применяют несколько осей с управляемыми колесами.
При этом водитель непосредственно поворачивает колеса первой оси, колеса прочих осей связаны с первой осью с помощью механических, гидравлических или электрогидравлических передач, которые управляют их поворотом. Управляемые колеса полуприцепов могут поворачиваться в зависимости от угла складывания между автомобилем-тягачом и полуприцепом или двумя частями сочлененных автобусов.
Самоустанавливающаяся ось полуприцепа
В ряде случаев для упрощения конструкции рулевого управления задние поворотные колеса многоосных автомобилей и прицепов делаются самоустанавливающимися, т. е. колеса на повороте сами поворачиваются на углы, при которых на них не воздействуют боковые силы.
Силовой способ поворота автомобиля аналогичен способу поворотов гусеничных машин. При этом способе функции рулевого управления выполняет специальная трансмиссия. При воздействии водителя наорганы управления трансмиссия подтормаживает колеса одного борта с подачей тяговых сил на колеса другого, что вызывает появление момента сил правого и левого борта, который стремится повернуть машину относительно вертикальной оси. Такая схема управления обеспечивает поворот практически на месте. Но силовой способу правления на современных автомобилях почти не применяется, что связано с низкой точностью управления на большой скоростяи, высоким износом шин, необходимостью устанавливать двигатели повышенной мощности и сложные трансмиссии.
Вместе с тем силовой способ управления поворотом все же применяется в современных автомобилях, но не в качестве основного, а как основа функционирования электронной системы стабилизации траектории ESP.
Принцип поворота колесных машин
Одна из самых важных систем ТС с точки зрения безопасности движения — система рулевого управления, обеспечивающая его движение (поворот) в заданном направлении.
В зависимости от конструктивных особенностей колесных машин различают три способа поворота:
- при помощи поворота управляемых колес одной, нескольких или всех осей
- созданием разности скоростей неуправляемых колес правого и левого бортов машин (поворот «погусеничному»)
- взаимным принудительным поворотом звеньев щарнирно-сочлененного ТС
Много- или двухзвенные колесные ТС (автопоезда), состоящие из колесного тягача, прицепа (прицепов) или полуприцепа (полуприцепов), осуществляют поворот при помощи управляемых колес только тягача или тягача и прицепного (полуприцепного) звена.
Поворот машины при помощи поворота управляемых колес одной, нескольких или всех осей
Наиболее широкое распространение получили схемы колесных машин с поворотными (управляемыми) колесами.
При увеличении числа пар управляемых колес уменьшается минимально возможный радиус поворота машины, т.е, улучшаются маневренные качества ТС. Однако стремление улучшить маневренность за счет применения передних и задних управляемых колес существенно усложняет конструкцию привода управления ими. Максимальный угол повороту управляемых колес обычно не превышает 35 …40°.
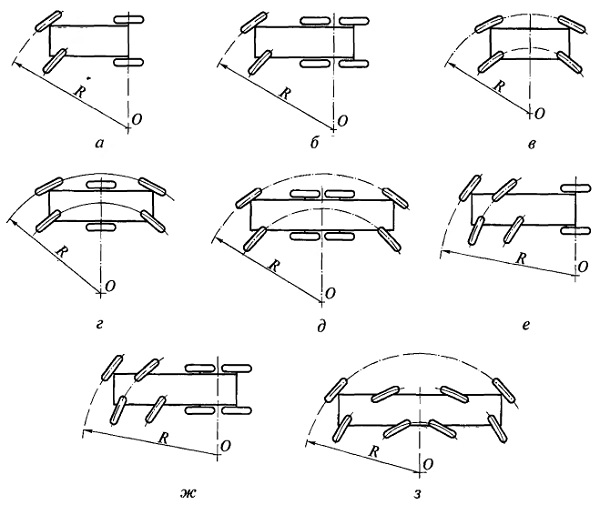
Рис. Схемы поворота двух-, трех- и четырехосных колесных машин с управляемыми колесами:
а, б — передними; в — передними и задними; е, ж — первой и второй осей; з — всех осей
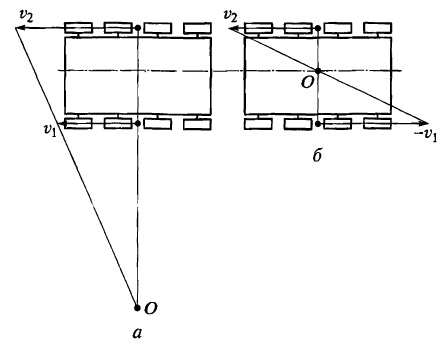
Рис. Схемы поворота колесной машины с неуправляемыми колесами:
а — с большим радиусом поворота; б — с нулевым радиусом; О — центр поворота; V1, V2 — скорости движения отстающего и забегающего бортов машины
Поворотом управляемых колес ТС водитель заставляет его передвигаться по траектории заданной кривизны в соответствии с углами поворота колес. Чем больше угол их поворота относительно продольной оси машины, тем меньше радиус поворота ТС.
Поворот ТС «по-гусеничному» принципу
Схема поворота «по-гусеничному» принципу используется сравнительно редко и в основном на специальных ТС. Примером может служить колесный тягач с неповоротными колесами и трансмиссией, обеспечивающей поворот тягача практически вокруг его геометрического центра. Такую же схему поворота имеет отечественный луноход, имеющий электромотор-колеса с формулой 8×8. Поворот подобных ТС осуществляется при неодинаковой скорости колес разных бортов машины. Такое управление поворотом наиболее просто обеспечить прекращением подачи вращающего момента на отстающий при повороте борт машины, скорость колес которого уменьшается вследствие их подтормаживания. Чем больше разность скоростей забегающего V2, т.е. внешнего по отношению к центру поворота (точка О), и отстающего V1 (внутреннего по отношению к центру поворота) бортов машины, тем меньше радиус ее криволинейного движения. В идеальном случае, если скорости всех колес обоих бортов будут равны, но направлены в противоположные стороны (V2 = -V1), мы получим нулевой радиус поворота, т. е. машина будет поворачиваться вокруг своего геометрического центра.
Основными недостатками ТС с неуправляемыми колесами являются повышенный расход мощности на совершение поворота и больший износ шин по сравнению с автомобилями, имеющими управляемые колеса.
Шарнирносочлененные схемы поворота ТС для инженерных тягачей
Инжирные тягачи обладают хорошей маневренностью (минимальный радиус поворота у них меньше, чем у обычных автомобилей с такой же базой и лучшей приспособляемостью к неровностям дороги (из-за наличия шарниров в сцепном устройстве тягача и прицепного звена), а также обеспечивают возможность использования колес большого диаметра, что улучшает проходимость этих ТС.
Как автомобиль поворачивает
Последнее обновление: 31.05.2020
Комментариев нет
В этой статье речь пойдет не о том, как устроено рулевое управление автомобиля, а о том, как автомобиль ведет себя на дороге во время поворота. О том, как в этот момент распределяются силы по колесам, и как весь этот процесс движения автомобиля на повороте, когда автомобиль поворачивает, влияет на безопасность его движения на дуге поворота.
Это необходимо знать в первую очередь для того, чтобы понять по каким причинам автомобиль может произвольно «уйти» с заданной траектории движения. Произвольно – это когда водитель этого не хотел, но так получилось, вопреки всем стараниям удержать автомобиль на дороге.
Что такое поворот автомобиля
Что такое поворот автомобиля (из области физических понятий). Поворот автомобиля – это изменение направления его движения отличного от прямолинейного. Что это означает?
Когда передние колеса находятся в положении «прямо», то автомобиль движется прямолинейно, т.е. по прямой. Если передние колеса повернуть на любой, самый незначительный угол, то автомобиль начнет поворачивать. Радиус поворота автомобиля зависит от величины угла поворота передних колес. Чем больше повернуты колеса, тем меньше радиус поворота.
Поскольку поворот колес осуществляется механизмом рулевого управления, то рассуждая о движении автомобиля в повороте, принято говорить не об углах поворота передних колес, а повороте рулевого колеса. Даже незначительный поворот руля «уведет» автомобиль с прямолинейной траектории.
Если повернуть руль, зафиксировать его в одном положении и приступить к движению, то автомобиль опишет окружность. Центр окружности, вдоль которой поворачивает автомобиль, всегда лежит на «продолжении» задней оси автомобиля, а радиус поворота автомобиля изменяется вращением рулевого колеса (углом поворота передних колес).

Итак, ответ на вопрос, что такое поворот автомобиля – это изменение направления его движения, осуществляемое путем вращения рулевого колеса на некоторый угол в определенную сторону (влево или вправо) в процессе движения. Это не официальное определение, но оно вполне понятно для осмысления процесса движения автомобиля на повороте.
Силы, действующие на автомобиль в повороте
Машина остается управляемой, когда колеса имеют контакт с дорогой достаточный для того, чтобы колеса, цепляясь за дорогу, катились, а не скользили. С увеличением скорости этот контакт несколько ослабевает, и в зависимости от качества (состояния) дорожного покрытия может исчезнуть совсем. Это свойство заметно проявляется на скользкой поверхности дороги (песок, мокрая глина, дождь, слякоть, снег, гололед).
Автомобиль опирается на дорогу четырьмя колесами (для упрощения понимания действия сил рассмотрим легковой автомобиль). Сложная система подвески помогает преодолевать неровности дороги и обеспечивает водителю и пассажирам определенный комфорт, но важно понять, что сцепление с дорожным покрытием автомобилю обеспечивают только четыре пятна контакта его колес.
В состоянии покоя, когда автомобиль стоит на месте, вес автомобиля равномерно распределен по всем его колесам. Можно сказать, что вес равномерно «давит» на все четыре колеса автомобиля.
В момент начала движения (старта) и набора скорости (разгона) вес автомобиля перемещается назад. В момент замедления автомобиля (торможения, в т.ч. используя двигатель, или сброс газа) и его остановки, вес перемещается вперед. Этот механизм загрузки-разгрузки по осям описан в статье Осторожно скользкая дорога.
Когда автомобиль наберет скорость и движется прямолинейно на постоянной тяге (число оборотов двигателя остается неизменным), вес автомобиля почти равномерно распределяется по всем колесам. И если полотно дороги более-менее ровное и сцепление колес с дорожным полотном хорошее, тогда автомобиль на дороге устойчив и управляем – он легко слушается руля.
Но реальность такова, что дорога не всегда прямолинейна и не без изъянов. Приходится все время корректировать линию движение поворотом руля, как на прямой дороге, так и на ее изгибах.
Поворачивать приходится и на перекрестках, и на дорожных развязках, которые могут оказаться достаточно крутыми, и на естественных изгибах дороги. Вращение руля приходится использовать везде и в разных условиях: хотя бы для того чтобы выехать из двора (прилегающей территории), повернуть на дорогу, объехать яму и пр.
Что происходит с автомобилем, когда он поворачивает? Поскольку любой автомобиль имеет вес и обладает инерцией, то когда автомобиль приступает к повороту, его вес как бы продолжает двигаться по прямой, т.е. центр массы автомобиля стремится за пределы окружности поворота с силой, которую дает ему ускорение (чтоб было понятнее — скорость). Вектор силы направлен перпендикулярно радиусу поворота.
Это стремление «вырваться» за пределы дуги поворота тем сильнее, чем меньше радиус поворота (чем больше выкручен руль) и чем выше скорость автомобиля в повороте. Именно по этой причине скорость необходимо снизить еще до входа в поворот, а непосредственно дугу поворота необходимо пройти на постоянной (неизменной) скорости (на ровной «тяге»).
Последствия перемещения веса в процессе поворота автомобиля неминуемо сказываются на качестве сцепления колес с дорожным покрытием. Во время движения автомобиля в повороте происходит перераспределение его веса на каждом! из его четырех колес. Что это значит?
Это значит, что при повороте автомобиля сцепление с дорогой у всех колес неравномерное. Самым нагруженным колесом становится «внешнее» переднее колесо относительно дуги поворота. На правом повороте этим колесом становится переднее левое, а на левом повороте – переднее правое.
Соответственно, у этих колес на повороте будет самое сильное сцепление с дорожным полотном. У остальных колес сцепление с дорогой на поворотах в разной степени ослабевает. Этот процесс изменения качества сцепления происходит непрерывно с каждым поворотом рулевого колеса!
Автомобиль остается управляемым и слушается поворота руля только благодаря хорошему сцеплению колес с дорожным покрытием. Хорошее сцепление – это когда колеса автомобиля катятся и цепляются за дорогу, а не скользят. Причем, не важно, автомобиль движется в повороте или он едет по прямой дороге, и неважно, действие происходит летом на сухой дороге или зимой, во время гололеда.
Решающий фактор – скорость. Если автомобиль начинает терять сцепление с дорогой, значит его скорость в данных дорожных условиях высокая. Следовательно, нужно снизить скорость и не доводить ситуацию до критических обстоятельств.
Разница между особенностями движения на летней и зимней дороге состоит лишь в том, что на зимней скользкой дороге автомобиль потеряет сцепление с дорогой (заскользит) на значительно меньшей скорости, чем на летней сухой дороге при прочих равных условиях движения!
На одном и том же полотне дороги во время движения автомобиля на повороте его колеса заскользят быстрее, чем на прямолинейном движении. Чем выше скорость на дуге поворота, тем выше вероятность срыва колес в скольжение (и как следствие, это снос или занос). Это правило необходимо учитывать во время движения на скользкой дороге.
Перераспределение веса по колесам автомобиля происходит при каждом повороте руля, в том числе и при корректировке движения на прямой дороге. Поэтому руль всегда необходимо поворачивать плавно. Быстро, но плавно, не делая резких движений.
В таких ситуациях хорошую помощь оказывают электронные системы стабилизации, но не стоит полностью полагаться только на автомобильную электронику.
Электронные помощники, коими оснащаются современные машины, безусловно, очень сильно облегчают вождение. Они способны исправить многие ошибки водителя в технике управления автомобилем, и способствуют выходу из критических ситуаций, но лучше эти ситуации не допускать. Есть пределы, за которыми электроника бессильна.
Главный за рулем – это водитель, а электронный помощник – это всего лишь умный помощник в умелых руках.
В дополнение изложенному материалу предлагаю ознакомиться с содержанием следующих статей:
Автор: Сергей Довженко
Последняя редакция: 31.05.2020
Если есть желание поделиться прочитанным, ниже кнопки на выбор. Жмем, не стесняемся.