CNC-DESIGN
В корзине пусто!
Настройка тока драйвера шагового двигателя
Драйвер шагового двигателя является достаточно важным компонентом любого ЧПУ устройства, управляя движением каждой из осей. Перед использованием необходимо убедиться, что они правильно установлены и настроены, чтобы не допустить перегорание шаговых моторов или платы контроллера Arduino Sheild.
Настройку тока драйвера необходимо сделать для решения нескольких достаточно важных моментов:
— уменьшить вероятность пропуска шагов при низком токе;
— снижение нагрева драйвера и шагового двигателя при высоком напряжении;
— снизить шум при высоких значениях тока;
Для настройки тока нам понадобится:
— контроллеры с установленными драйверами;
— драйвера А4988 или DRV8825 ;
— мультиметр;
— отвертка.
Для начала необходимо собрать и подключить всю систему в полношаговом режиме. После сборки «бутерброда» из контроллера Ардуино, ЧПУ шилда и драйверов шаговых двигателей необходимо подключить шаговые двигатели. В описании к выбранным моторам надо узнать значение максимального тока Imax (для примера у шагового двигателя 17HS8401 это значение 1,8А)
Затем надо рассчитать значение опорного напряжения Vref на переменном резисторе для каждого типа драйверов, у нас их два: А4988 или DRV8825.
Формула опорного напряжения Vref для драйверов отличается.
Расчет для драйвера типа А4988.
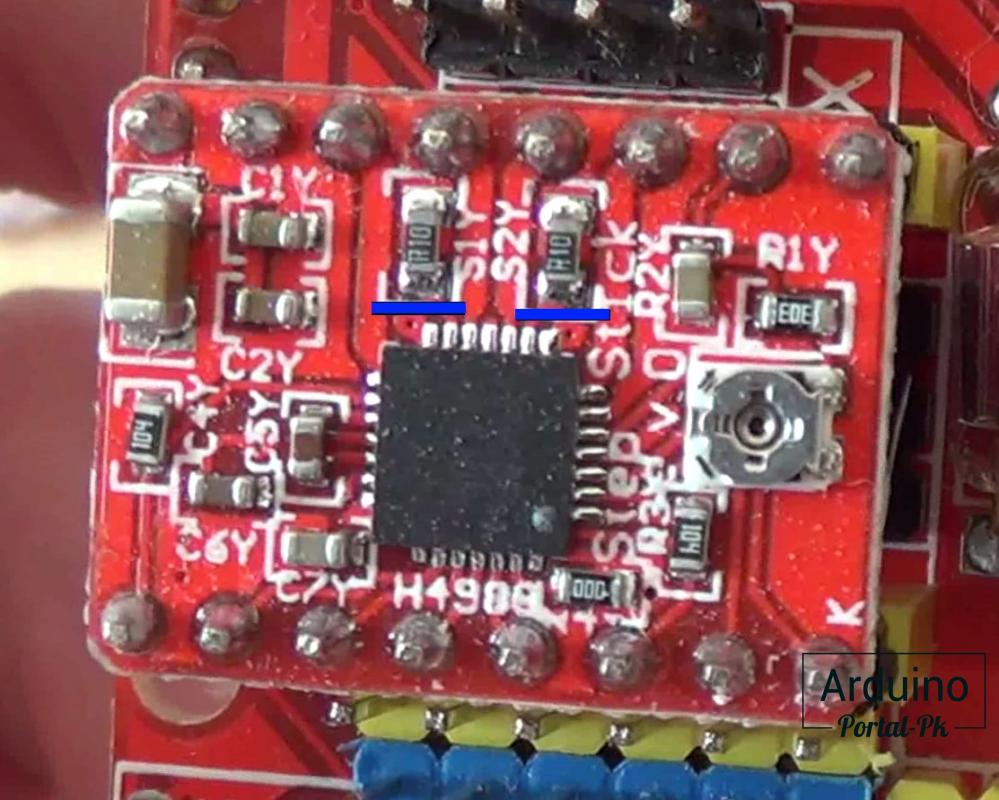
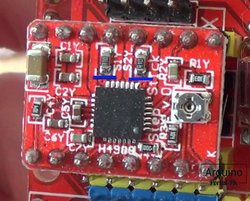
Для A4988 формула расчета зависит от номинала резисторов, которые распаяны на плате драйвера. Если присмотреться, то можно увидеть надписи R050 или R100. 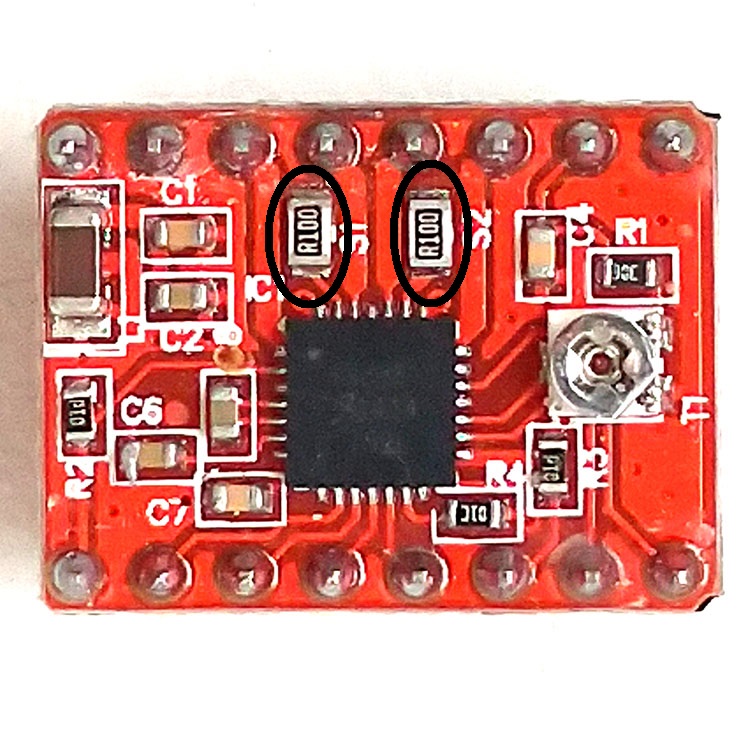
На приведенной фотографии они обведены черными кружками, их значение R100.
В общем виде формула выглядит как:
Vref = Imax * 8 * (RS)
Imax — максимальный ток на обмотках двигателя, из описания;
RS — сопротивление резистора, если резистор подписан R100, то RS=0,100, при R050 значение RS=0,05.
Для двигателя из нашего примера 17HS8401
Vref = 1,8 * 8 * 0,100 = 1,44 В.
Из-за того, что рабочий ток двигателя обычно рекомендуется ограничивать в 70% от максимального тока, для уменьшения перегрева двигателя, полученное значение необходимо умножить на 0,7.
Vref= 1,44*0,7 = 1,01 В.
Расчет для драйвера типа DRV8825.
Формула опорного напряжение для данного типа драйвера:
При рекомендованной работе на 70% от максимального тока двигателя, подставив значения для нашего примера, получим следующие значения:
Vref = 0.7*1,8 / 2 = 0.63V
Настройка тока драйвера на контроллере.
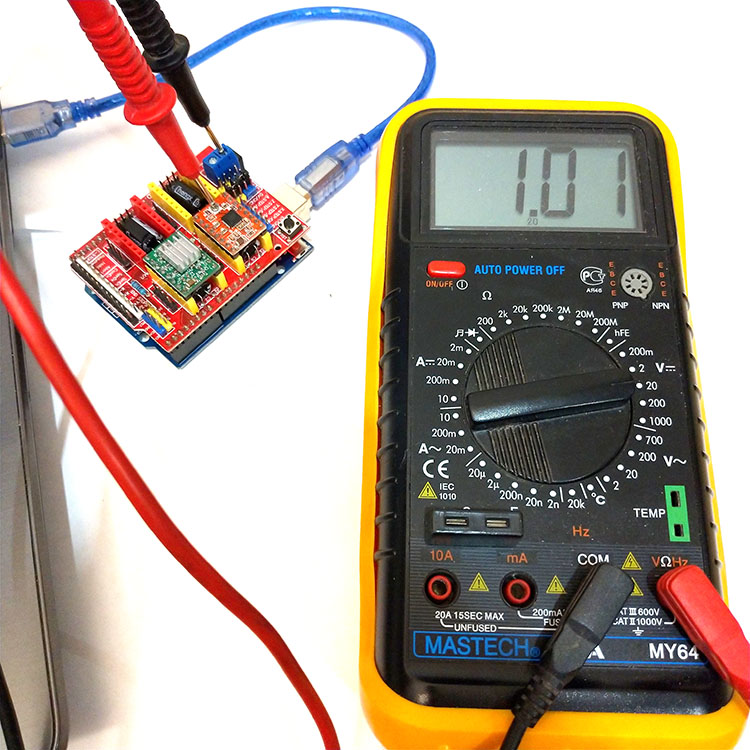
Для настройки необходимо подключить сборку плат к компьютеру,
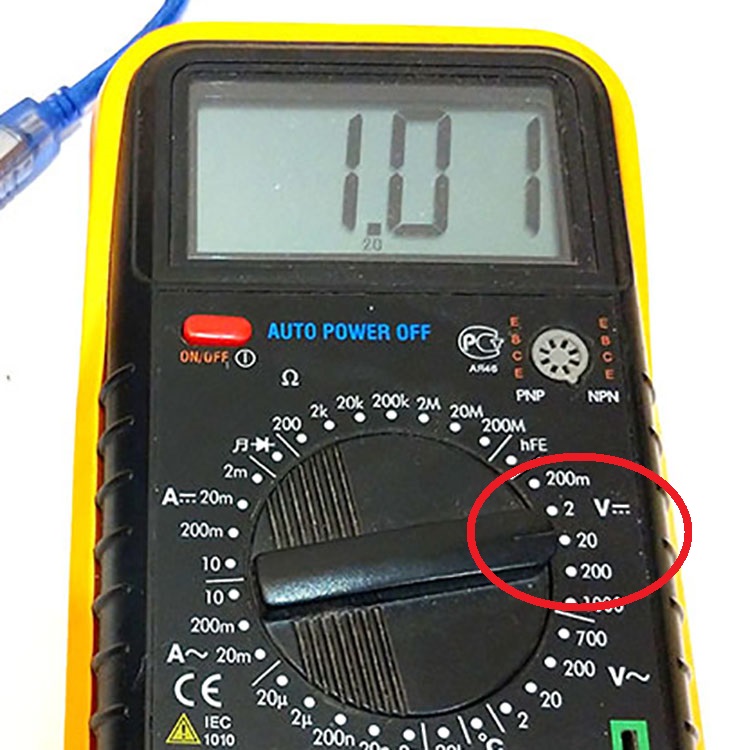
Включить на мультиметре измерение постоянного напряжения напротив положения «20».
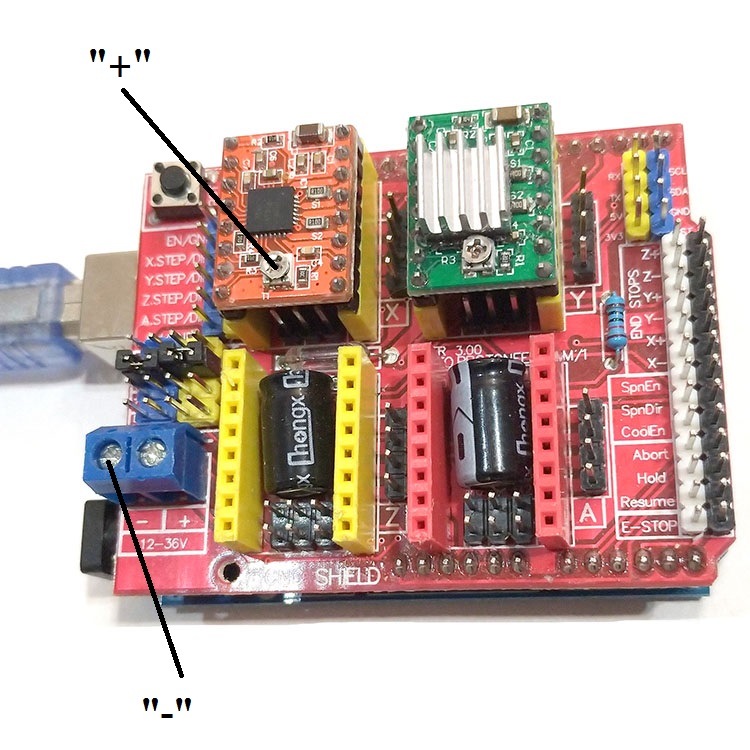
Для измерения напряжения необходимо минусовой щуп приложить к минусу на CNC Sheild, а положительный щуп замкнуть с подстроечным резистором, который по совместительству является «+» в данной схеме.
Необходимо вращать подстроечный резитор, пока мультиметр не покажет требуемое значение напряжения, при вращении по часовой стрелке, значения растут, против часовой стрелки — напряжение падает.
Настройку расчетных значений необходимо повторить это для всех активных драйверов в сборке.
Настройка драйвера A4988. Первый запуск шаговых двигателей

Продолжаю сборку станка ЧПУ. Шаговые двигателя я уже подобрал. Для проверки электроники, собрал тестовое подключение на столе.
Более подробное описание драйверов A4988 читайте на моем втором сайте ЧПУ технологии (CNC-tex.ru).
Сперва я подключил к CNC shield v3 шаговые двигателя:
- 17HS4401 — ток 1,7A
- EM-181 — ток 1,2A
- EM-142— значение максимального тока не нашел.
Двигателя выбраны сейчас нам нужно настроить рабочий ток драйверов A4988 для каждого шагового двигателя. Это можно сделать двумя способами:
1. Подключить двигатель в полношаговом режиме и замерить ток на одной обмотки. Он должен быть 70% от номинального тока двигателя. Т.е. для 17HS4401 1,7*0,7= 1,19 А
2. Рассчитать значение Vref — напряжение на переменном резисторе расположенном на драйвере А4988.
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов. Это два черных прямоугольника на плате драйвера. Обычно подписаны R050 или R100.
Vref = Imax * 8 * (RS)
Imax — ток двигателя;
RS — сопротивление резистора. В моем случае RS = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Аналогично рассчитываю значения для EM-181
Vref = 1,2 * 8 * 0,100 = 0,96 В
Vrefист. = ,96*0,7 = 0 ,672 В.
Так как я не смог найти datasheets для ЕМ-142. Для расчетов предложил, что ток на обмотку данного двигателя составляет 0,6 А. Если двигатель будит издавать гул сильнее обычного значит ток превышает максимальное значение. Его нужно понижать. Так как я взял ток обмотки. При расчете Vref ист. Не нужно умножать на 0,7, как я говорил выше ток одной обмотки составляет 70% от номинального. Расчет будет вот таким:
Vrefист. = 0,6 * 8 * 0,100 = 0,48 В.
По моим ощущениям я угадал с током двигателя ЕМ-142. Останется рассчитать сколько шагов он делает для совершения одного оборота. Об этом расскажу в следующей статье.
В видео подключил кнопки «Пауза», «Продолжить», «Аварийная остановка» . Подключил на пины шпинделя светодиод. И протестировал работу. Так же установил один конечный выключатель. Все работает. Если у вас возникли вопросу что куда подключается к CNC shield v3, читайте статью: Плата расширения для Arduino UNO, CNC shield v3 и драйверов A4988
Подписывайтесь на мой канал на Youtube и вступайте в группы в Вконтакте и Facebook.
Спасибо за внимание!
Понравилась статья? Поделитесь ею с друзьями:
Выбор и настройка драйвера шагового двигателя
Данный цикл статей относится к настройке шаговых двигателей — с данной задаче сталкивается любой ЧПУ-шник. Для базы мы будем брать настройку драйверов для 3D-принтера, но по факту правила подойдут к любому станку. Итак, поехали.
- Часть 1 — Вводная статья, выбор драйвера шагового двигателя
- Часть 2 — Подключения драйверов к различным платам:
- Часть 2.1 Установка перемычек на платы RAMPS и MKS GEN L в режиме DIR STEP
- Часть 2.2 Установка перемычек на платы MKS SGEN L, BIGTREETECH SKR в режиме DIR STEP
- Часть 2.3 Режимы SPI и UART (в процессе написания)
- Часть 3 — Настройка VRef (в процессе написания)
- Часть 4 — UART (в процессе написания)
- Часть 5 — обзор самых популярных драйверов (в процессе написания)
1. ВЫБОР ДРАЙВЕРА ШАГОВОГО ДВИГАТЕЛЯ
На что необходимо обратить внимание при выборе шагового двигателя:
- Режим его работы. Например, для осей X и Y степень вовлеченности шаговика будет максимальной (т.к. это основные координаты перемещений), а для оси Z — минимальной (в 3D принтерах единица движения по этой оси происходит только при смене слоя)
- Место использования. Тут всё просто — каковы ваши требования в части тишины. Если вы находитесь в производственном помещении, то требования к шуму будут небольшие. Если дома в отдельной комнате, то средние. Если в спальной — максимальные.
- Используемые двигатели. Данный пункт предполагает прямую зависимость по потреблению тока в ШД. Для мощных двигателей не подойдут слабые драйвера. И, конечно, слабым движкам нет никакой необходимости ставить «взрослые» драйвера.
- Точность позиционирования (или микрошаг). С одной стороны этот параметр показывает сколько необходимо сделать микрошагов на один полный шаг (1.8 градусов поворота вала или, иногда, 0.9) и по сути определяет точность. Кроме того, это понижает шум, снижает резонансы и увеличивает плавность движения. Но тут палка о двух концах — чем больше микрошагов, тем слабее момент удержания. Чтобы представить себе этот процесс, попробуйте зажать пальцами движок с режимом 1/16 и 1/256. В первом случае это сделать невозможно. Во втором достаточно легко (момент приблизительно = 1% от номинала). Кроме того, повышение микрошагов дает существенное повышение температуры, а значит мы постепенно приходим к необходимости усиления охлаждения драйверов. Ещё один интересный момент — увеличение количества микрошагов иногда является бессмысленным занятием. Для вала М6 при дроблении 1/16 мы получаем теоретическую точность позиционирования 300нм, что и так является некоторым маразмом для FDM принтеров. Т.е. на точность при выборе микрошага смотреть смысла нет.
Итак, наши варианты:
Ось Z: это самая редко используемая ось в части количества перемещений. А значит шума от неё в любом случае будет мало. Для этой оси всегда подойдет самый простой A4988. Более того, этот драйвер имеет достаточно большой запас по току — стабильные 2А, а значит подойдет не только для стандартного движка 17HS4401 (1.7А), но и для более мощного 17HS8401. Не переплачивайте за драйвера на эту ось! В крайнем случае возьмите DRV8825 в режиме 1/32.
Ось X и Y: Если вам не принципиальны шумы, то берите A4988 (1/16) или DRV8825 в режиме 1/32. Для остальных случаев наша рекомендация TMC2208 или TCM2209 (1/32). Оба движка с запасом по току, но отличаются удивительной тишиной.
Экструдер: самая сложная часть. С одной стороны двигатель по экструдеру используется очень часто, а с другой стороны в основном эти движения крайне плавные. Исключение — ретракты. Если у вас боуден, то ретракты происходят не только часто, но и на большие расстояния (4-7мм). Если директ — на меньшие расстояния. Наш выбор — либо A4988, либо TMC2208/TMC2209 в зависимости от доступного вам бюджета.
2. ПОДКЛЮЧЕНИЕ И НАСТРОЙКА
В вводной статье мы просто опишем основные этапы того, что необходимо сделать. В рамках одной статьи физически не собрать всю информацию. В дальнейшем мы будем описывать правила установки для каждой платы (или серии плат) отдельно.
ВАЖНО: соблюдайте правила подключения, т.к. в противном случае вы спалите управляющую плату!
Перед подключением для начала правильно установите джамперы для установки микрошага. Обратите внимание, что для каждого вида драйвера свой порядок установки джамперов. Например, для драйвера DRV8825 и платы BIGTREETECH SKR 1.3 необходимо использовать следующую таблицу:
Следующим пунктом после установки джамперов является собственно установка самих драйверов. Правило очень простое — необходимо совместить пины драйвера с пинами платы. Как узнать какие пины где находятся? Элементарно — наберите в гугле «НАЗВАНИЕ_ПЛАТЫ PINOUT», выпишите на листке распиновку (достаточно будет выписать пины DIR и EN). Потом наберите «НАЗВАНИЕ_ДРАЙВЕРА PINOUT» и совместите на плате эти пины. Кроме того, можно ориентироваться по направлению подстроечного резистора (расположен на драйвере, похож на головку винта), с помощью которого мы дальше будем регулировать VRef.
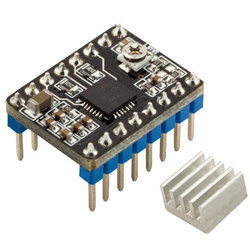
ВАЖНО: Не забудьте поставить на драйвер радиатор, т.к. драйвер — один из самых горячих модулей, а перегрев чреват пропусками шагов.
После установки драйвера необходимо правильно отрегулировать VRef. Это число зависит как от самого драйвера, так и от используемого мотора. Опять же — это отдельная статья. Мы также сделаем таблицу для различных драйверов и моторов. Ну, и последнее, что осталось сделать — при необходимости прописать выбранный драйвер в прошивке.
На сегодня всё, следите за обновлениями нашего блога.
С Уважением, Мастерская робототехники Human & Gears
ПОЛЕЗНО Шаговые двигатели, характеристики. Драйверы шаговых двигателей, разновидности, настройка.
Alsan
Alsan
МЕСТНЫЙ СТАРОЖИЛА
- 01.05.2019
- Последнее редактирование: 04.05.2019
На форуме периодически всплывают вопросы о драйверах шаговых двигателей и их настройке. Решил разобраться с этим делом для себя, возможно кому-нибудь также пригодится.
Для начала разновидности двигателей Nema17. 
17HS4401 ток 1,7A – обычные
17HS8401 ток 1,8А – более мощные
17HS4402 ток 1,3A – по некоторым сведениям менее шумные, чем 17HS4401
Nema17BH 42BHM(42BYG) — в архиве: Nema17 — (описание и параметры разновидностей ШД)
(здесь важен ток двигателя, для дальнейших расчетов).
А4988
Встречаются варианты разного цвета. 

Поэтому нужно обращать внимание не на цвет, а на микросхему драйвера.
Схема и распиновка: 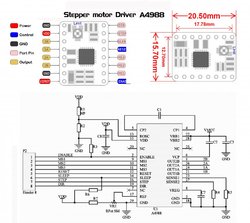
Характеристики А4988
Напряжения питания логической части: 3-5,5 В
Напряжения питания силовой части: 8-35 В
Максимальный ток без дополнительного охлаждения: 1 А
Максимальный ток с дополнительным охлаждением: 2 А
Дробление шага: 1, 1/2, 1/4, 1/8, 1/16
Защита от перегрузок и перегрева
Назначение контактов драйвера A4988
ENABLE – включение/выключение драйвера
MS1, MS2, MS3 – контакты для установки микрошага
RESET — cброс микросхемы
STEP — генерация импульсов для движения двигателей (каждый импульс – шаг), можно регулировать скорость двигателя
DIR – установка направление вращения
VMOT – питание для двигателя (8 – 35 В)
GND – общий
2B, 2A, 1A, 1B – для подключения обмоток двигателя
VDD – питание микросхемы (3.5 –5В)
Значение микрошага устанавливается комбинацией сигналов на входах MS1, MS2, и MS3. Есть пять вариантов дробления шага.
MS1 MS1 MS1 Дробление шага
0 0 0 1
1 0 0 1/2
0 1 0 1/4
1 1 0 1/8
1 1 1 1/16
Для работы в режиме микрошага необходим слабый ток. На модуле A4988 поддерживает тока можно ограничить находящимся на плате потенциометром. Драйвер очень чувствителен к скачкам напряжения по питанию двигателя, поэтому производитель рекомендует устанавливать электролитический конденсатор большой емкости по питанию VMOT для сглаживания скачков. Внимание ! — Подключение или отключение шагового двигателя при включённом драйвере может вывести двигателя и драйвер из строя.
Настройка Vref для A4988
Формула Vref для A4988 изменяется от номинала токочувствительных резисторов(Rs). Это два черных прямоугольника на плате драйвера. Обычно подписаны R050(номинал — 0.05 Ом) или R100 (номинал — 0.1 Ом).
Vref = Imax * 8 * (Rs)
Imax — ток двигателя;
Rs — сопротивление резистора. В моем случае Rs = 0,100.
Для 17HS4401 Vref = 1,7 * 8 * 0,100 = 1,36 В.
В связи с тем что рабочий ток двигателя равен 70% от тока удержания. Полученное значение нам нужно умножить на 0,7. В противном случае двигателя в режиме удержания будут сильно греться.
Для 17HS4401 Vref ист. = 1,36*0,7 = 0,952 В.
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Исходя из этого, при длительной работе, на практике можно использовать коэффициент 0,6
Получается для Для 17HS4401, с током 1,7А Vref = 1,7 * 8 * 0,100*0,6=0,816 (0,82)
DRV8825
Плата создана на базе микросхемы компании TI (Texas Instruments Inc.) DRV8825 — биполярном шаговом драйвере двигателя. Расположение выводов и интерфейс модуля почти совпадает с драйвером шагового двигателя Pololu на микросхеме A4988, поэтому DRV8825 может стать высокопроизводительной заменой этой платы во многих приложениях.
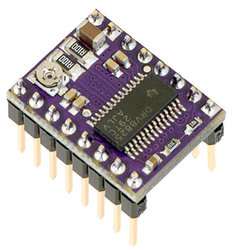
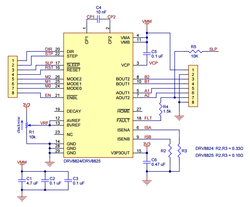
Схема:
Характеристики:
шаг:1, 1/2, 1/4, 1/8, 1/16, 1/32.
Регулировка тока на обмотках двигателя, переменным резистором опорного напряжения.
Источника питания для двигателей от 8,2 В до 45 В.
Встроенный регулятор напряжения для логических цепей. Возможность подключения к логике как 3,3 В, так и 5 В.
Защита от перегрева (отключение при нагреве драйвера 150 градусов).
Защита по превышению тока обмоток.
Защита по пониженному напряжению.
Защита от короткого замыкания на землю.
При токе до 1,5 А на обмотку способен работать без радиаторов и дополнительного охлаждения.
Регулировку тока двигателя следует производить выставив переменным резистором опорное наряжение (на выводах 12,13 микросхемы или на «среднем контакте резистора») из расчета 1 к 2, т.е 0,5В соответствует 1А, напряжению 1В соответствует 2А.
Обратите внимание, что переходное отверстие (золотистое) на плате, возле выводов 12,13 не является контактом для проверки опорного напряжения, это линия питания двигателей. 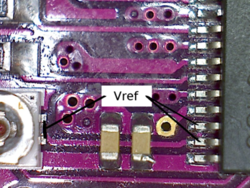
Режим микрошага устанавливается путем подачи «1» на контакты MODE0, MODE1, MODE2. (В случае установки драйвера на RAMPS это перемычки MS1, MS2, MS3)
M0 M1 M2 Режим микрошага
не стоит не стоит не стоит полный
стоит не стоит не стоит 1/2
не стоит стоит не стоит 1/4
стоит стоит не стоит 1/8
не стоит не стоит стоит 1/16
стоит не стоит стоит 1/32
не стоит стоит стоит 1/32
стоит стоит стоит 1/32
DRV8825 расчет Vref
Current Limit = Vref * 2
Vref = Current Limit / 2
Например для шагового двигателя 17HS4401: Vref = 1,7 / 2 = 0,85В
Обычно Vref ставят ниже, для снижения температуры нагрева шагового двигателя.
Детальное описание драйверов А4988 и DRV8825 в архиве А4988_DRV8825.rar
Встречалась информация ,что по умолчанию на драйверах DRV8825 выставлен максимальный ток, поэтому регулировка перед началом работы обязательна:
«По умолчанию у красных A4988 опора стоит в 0.8V это 1A ничего плохого не случится, но у DRV8825 опора выставлена в 1.6V -это максимальный ток, в теории 3.2А, по документации DRV8825 рассчитан максимум на 2.5A(2.2А с обдувом), это может повредить, как двигатель, так и драйвер.»