Подключение шагового двигателя к Ардуино

Шаговый двигатель 28byj-48 Arduino ► предназначен для перемещения объекта на заданное количество шагов вала. Рассмотрим управление шаговым двигателем от Ардуино
Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).
Фото. Устройство шагового мотора в разрезе
Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.
Фото. Виды драйверов для управления шаговым двигателем
Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
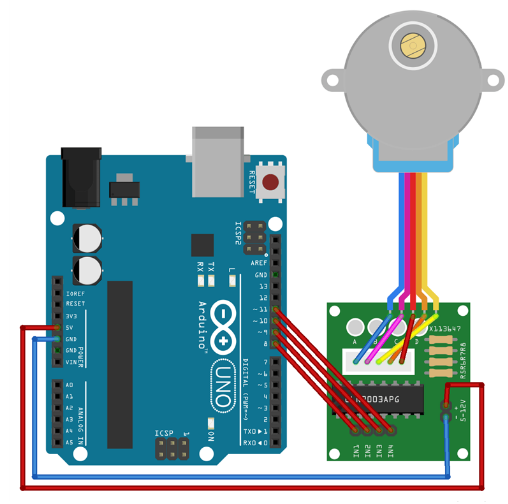
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия нам потребуется:
- плата Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».
Шаговые двигатели и моторы Ардуино 28BYJ-48 с драйвером ULN2003
В этой статье мы поговорим о шаговых двигателях в проектах Ардуино на примере очень популярной модели 28BYJ-48. Так же как и сервоприводы, шаговые моторы являются крайне важным элементом автоматизированных систем и робототехники. Их можно найти во многих устройствах рядом: от CD-привода до 3D-принтера или робота-манипулятора. В этой статье вы найдете описание схемы работы шаговых двигателей, пример подключения к Arduino с помощью драйверов на базе ULN2003 и примеры скетчей с использованием стандартной библиотеки Stepper.
Шаговый двигатель – принцип работы
Шаговый двигатель – это мотор, перемещающий свой вал в зависимости от заданных в программе микроконтроллера шагов и направления. Подобные устройства чаще всего используются в робототехнике, принтерах, манипуляторах, различных станках и прочих электронных приборах. Большим преимуществом шаговых двигателей над двигателями постоянного вращения является обеспечение точного углового позиционирования ротора. Также в шаговых двигателях имеется возможность быстрого старта, остановки, реверса.
Шаговый двигатель обеспечивает вращения ротора на заданный угол при соответствующем управляющем сигнале. Благодаря этому можно контролировать положение узлов механизмов и выходить в заданную позицию. Работа двигателя осуществляется следующим образом – в центральном вале имеется ряд магнитов и несколько катушек. При подаче питания создается магнитное поле, которое воздействует на магниты и заставляет вал вращаться. Такие параметры как угол поворота (шаги), направление движения задаются в программе для микроконтроллера.


 Упрощенные анимированные схемы работы шагового двигателя
Упрощенные анимированные схемы работы шагового двигателя
Основные виды шаговых моторов:
- Двигатели с переменными магнитами (применяются довольно редко);
- Двигатели с постоянными магнитами;
- Гибридные двигатели (более сложные в изготовлении, стоят дороже, но являются самым распространенным видом шаговых двигателей).
Где купить шаговый двигатель
Самые простые двигатели Варианты на сайте AliExpress:
Драйвер для управления шаговым двигателем
Драйвер – это устройство, которое связывает контроллер и шаговый двигатель. Для управления биполярным шаговым двигателем чаще всего используется драйверы L298N и ULN2003.
Работа двигателя в биполярном режиме имеет несколько преимуществ:
- Увеличение крутящего момента на 40% по сравнению с униполярными двигателями;
- Возможность применения двигателей с любой конфигурацией фазной обмотки.
Но существенным минусов в биполярном режиме является сложность самого драйвера. Драйвер униполярного привода требует всего 4 транзисторных ключа, для обеспечения работы драйвера биполярного привода требуется более сложная схема. С каждой обмоткой отдельно нужно проводить различные действия – подключение к источнику питания, отключение. Для такой коммутации используется схема-мост с четырьмя ключами.
Драйвер шагового двигателя на базе L298N
Этот мостовой драйвер управляет двигателем с током до 2 А и питанием до 46В. Модуль на основе драйвера L298N состоит из микросхемы L298N, системы охлаждения, клеммных колодок, разъемов для подключения сигналов, стабилизатора напряжения и защитных диодов.
 Драйвер двигателя L298N
Драйвер двигателя L298N
Драйвер шагового двигателя ULN2003
Шаговые двигателями с модулями драйверов на базе ULN2003 – частые гости в мастерских Ардуино благодаря своей дешевизне и доступности. Как правило, за это приходится платить не очень высокой надежностью и точностью.
Другие драйвера
Существует другой вид драйверов – STEP/DIR драйверы. Это аппаратные модули, которые работают по протоколу STEP/DIR для связи с микроконтроллером. STEP/DIR драйверы расширяют возможности:
- Они позволяют стабилизировать фазные токи;
- Возможность установки микрошагового режима;
- Обеспечение защиты ключа от замыкания;
- Защита от перегрева;
- Оптоизоляция сигнала управления, высокая защищенность от помех.
В STEP/DIR драйверах используется 3 сигнала:
- STEP – импульс, который инициирует поворот на шаг/часть шага в зависимости от режима. От частоты следования импульсов будет определяться скорость вращения двигателя.
- DIR – сигнал, который задает направление вращения. Обычно при подаче высокого сигнала производится вращение по часовой стрелке. Этот тип сигнала формируется перед импульсом STEP.
- ENABLE – разрешение/запрет работы драйвера. С помощью этого сигнала можно остановить работу двигателя в режиме без тока удержания.
Одним из самых недорогих STEP/DIR драйверов является модуль TB6560-V2. Этот драйвер обеспечивает все необходимые функции и режимы.
Подключение шагового двигателя к Ардуино
Подключение будет рассмотрено на примере униполярного двигателя 28BYj-48 и драйверов L298 и ULN2003. В качестве платы будет использоваться Arduino Uno.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Еще один вариант схемы с использованием L298:
 Подключение шагового двигателя к Ардуино на базе L298
Подключение шагового двигателя к Ардуино на базе L298
Схема подключения на базе ULN2003 изображена на рисунке ниже. Управляющие выходы с драйвера IN1-IN4 подключаются к любым цифровым контактам на Ардуино. В данном случае используются цифровые контакты 8-11. Питание подключается к 5В. Также для двигателя желательно использовать отдельный источник питания, чтобы не перегрелась плата Ардуино.
 Подключение шагового двигателя к Ардуино
Подключение шагового двигателя к Ардуино
Принципиальная схема подключения.
 Принципиальная схема подключения шагового двигателя
Принципиальная схема подключения шагового двигателя
Еще одна схема подключения биполярного шагового двигателя Nema17 через драйвер L298 выглядит следующим образом.

Обзор основных моделей шаговых двигателей для ардуино
Nema 17 – биполярный шаговый двигатель, который чаще всего используется в 3D принтерах и ЧПУ станках. Серия 170хHSхххА мотора является универсальной.

Основные характеристики двигателя:
- Угловой шаг 1,8°, то есть на 1 оборот приходится 200 шагов;
- Двигатель – двухфазный;
- Рабочие температуры от -20С до 85С;
- Номинальный ток 1,7А;
- Момент удержания 2,8 кг х см;
- Оснащен фланцем 42 мм для легкого и качественного монтажа;
- Высокий крутящий момент – 5,5 кг х см.
28BYJ-48 – униполярный шаговый двигатель. Используется в небольших проектах роботов, сервоприводных устройствах, радиоуправляемых приборах.

- Номинальное питание – 5В;
- 4-х фазный двигатель, 5 проводов;
- Число шагов: 64;
- Угол шага 5,625°;
- Скорость вращения: 15 оборотов в секунду
- Крутящий момент 450 г/сантиметр;
- Сопротивление постоянного тока 50Ω ± 7% (25 ℃).
Описание библиотеки для работы с шаговым двигателем
В среде разработки Ардуино IDE существует стандартная библиотека Strepper.h для написания программ шаговых двигателей. Основные функции в этой библиотеке:
- Stepper(количество шагов, номера контактов). Эта функция создает объект Stepper, которая соответствует подключенному к плате Ардуино двигателю. Аргумент – контакты на плате, к которым подключается двигатель, и количество шагов, которые совершаются для полного оборота вокруг своей оси. Информацию о количестве шагов можно посмотреть в документации к мотору. Вместо количества шагов может быть указан угол, который составляет один шаг. Для определения числа шагов, нужно разделить 360 градусов на это число.
- Set Speed(long rpms) – функция, в которой указывается скорость вращения. Аргументом является положительное целое число, в котором указано количество оборотов в минуту. Задается после функции Step().
- Step(Steps) –поворот на указанное количество шагов. Аргументом может быть либо положительное число – поворот двигателя по часовой стрелке, либо отрицательное – против часовой стрелки.
Пример скетча для управления
В наборе примеров библиотеки Stepper.h существует программа stepper_oneRevolution, в которой задаются все параметры для шагового двигателя – количество шагов, скорость, поворот.
Заключение
В этой статье мы с вами узнали, что такое шаговый двигатель, как можно его подключить к ардуино, что такое драйвер шагового двигателя. Мы также рассмотрели пример написания скетча, использующего встроенную библиотеку Stepper. Как видим, ничего особенно сложного в работе с шаговыми моторами нет и мы рекомендуем вам обязательно поэкспериментировать самостоятельно и попробовать включить его в своих проектах Arduino.
Как подключить шаговый двигатель к Arduino
Шаговые электромоторы и связанные с ними области техники находятся в поле зрения конструкторов-любителей уже долгое время. Интерес к ним не ослабевает благодаря программам и шаговым двигателям «Ардуино» для систем автоматики и робототехники.
.jpg)
Принцип работы шагового двигателя
На статор накручены электрические провода, формирующие обмотки. Если попеременно подавать на них напряжение, то ротор двигателя переместится на заранее указанный угол, например 3º или 0,9º. Его величина определяется конструкцией устройства. Таким образом, ротор движется не плавно, а скачками, иначе называемыми шагами. Если ротор сделал 6 скачков, то считают, что он переместился на 6 шагов.
Драйверы для мотора
Драйвер является связующим звеном контроллера и мотора. Работа с биполярным Arduino-двигателем требует механизма со сложной схемой, в то время как униполярные машины управляются сравнительно простым драйвером. Часто применяют вариант L298N, в его конструкцию входят:
- микросхема L298N;
- клеммные колодки;
- сигнальные штекеры;
- стабилизатор напряжения;
- диоды защиты;
- радиатор охлаждения.
Драйвер ULN2003 проще, он недорогой, но менее точен и надежен. Вариант на микросхеме L293D содержит 2 H-моста, поэтому способен управлять 2 моторами. Рабочий ток — 600 мА, максимальный ток в 2 раза больше, напряжение — до 36 В.
Процесс подключения
Сборка схемы сложностей не представляет, поэтому доступна любителю. Необходимы базовые знания в области электротехники, умение работать с ПК на пользовательском уровне и внимательность при написании скетчей. Макетная плата позволит обойтись без паяльника, припоя и канифоли.

Что понадобится
Для сборки схемы требуются следующие компоненты:
- Шаговый коллекторный двигатель.
- Плата Arduino. Начинающим подойдет модель UNO.
- Макетная плата.
- Диоды, транзисторы, резисторы, потенциометр.
- Перемычки и провода.
- «Мотор шилд» (Motor Shield) — дополнительная плата расширения для управления двигателем постоянного тока, она же регулятор оборотов.
- Вместо Motor Shield можно применить драйверы L298N, ULN2003 или L293D.
- Блок питания постоянного тока.
- Кабель USB для соединения с компьютером и загрузки скетчей.
На рынке предлагают готовые наборы (включают пп. 2-5).
Пошаговая инструкция
Драйвер и плата «Ардуино» могут выйти из строя при неправильной подаче электропитания, поэтому сначала требуется подключить минусовой провод. Выполнять действия нужно в приведенной последовательности:
- Подготовить скетч для управления мотором.
- Шилд управления двигателем или драйвер разместить сверху платы Arduino UNO.
- Проверить и при необходимости установить перемычки на плате расширения следующим образом: H1 соединяется с 4-м пином, E1 — с 5-м, E2 — с 6-м и H2 — с 7-м пином. Пины 5 и 6 должны поддерживать ШИМ (широтно-импульсную модуляцию).
- Подготовить блок для питания шилда постоянным током.
- Подать постоянный ток на контакты «+» и «-» платы расширения.
- Питание мотора подключить к контактам PWR на плате расширения.
- Соединить «Ардуино» кабелем USB с ПК и загрузить скетч.

Скетчи можно писать с применением библиотеки Stepper.h или AccelStepper.h. Плата Arduino UNO подходит для работы в режиме широтно-импульсной модуляции. В этом случае в блоке loop используют команды analogWrite и analogRead.

Описание библиотеки для работы
Пакет Arduino IDE содержит стандартную библиотеку Stepper.h. Она позволяет создать объект и затем управлять им с помощью 2 функций:
- Инструкция Stepper(steps, pin1, pin2, pin3, pin4) прописывает объект, где steps — число шагов за 1 полный оборот в 360º, pin1 — pin4 — контакты для подключения драйвера. Чтобы создать объект motorN, необходимо задать Stepper motorN(steps, pin1-4) с нужными числовыми значениями вместо символов в скобках.
- Скорость вращения вала двигателя задается как void setSpeed(long rpms), где rpms — об./мин, например, motorN.setSpeed(64).
- Поворот вала на заданное число шагов: void step(int steps), например, motorN.step(16).
Библиотека Stepper.h позволяет запрограммировать плату в тестовых или учебных целях. Гораздо больше функций содержит библиотека AccelStepper.h: она гибко управляет скоростью, работает с разными моделями двигателей, допускает присоединение к схеме более одной машины и содержит функции, показанные в таблице 2.
| Инструкции и аргументы | Комментарий |
|---|---|
| AccelStepper stepperQ(1, pinStep, pinDirection); | Объявление шагового двигателя с именем stepperQ. |
| AccelStepper stepperQ(2, pin1, pin2); | Описание 2-полярной машины под управлением H-моста. |
| AccelStepper stepperV(4, pin1-4); | Конфигурация 1-полярного движка stepperV, управляемого 4 транзисторными ключами. |
| stepperQ.setMaxSpeed(stepsPerSecond); | Поскольку по умолчанию скорость низкая, следует записать свою, в шагах/с. |
| stepperQ.setAcceleration(stepsPerSecondSquared); | Ускорение, шагов/с². |
| stepperQ.moveTo(targetPosition); | Перемещение вала в новую абсолютную позицию под управлением функции run(). |
| stepperQ.runSpeed(); | Апдейт — должен выполняться периодически, чтобы вал вращался. |

Скетчи для «Ардуино» Stepper h
Алгоритм управления представлен ниже.
Если необходимо переопределить режим функционирования пинов платы Arduino, то в стартовый блок добавляется инструкция setup pinMode.