Способы изменения скорости и направления вращения якоря (ротора).
Для увеличения скорости вращения якоря в тяговых машинах постоянного тока необходимо увеличить силу тока. Из закона Ома понятно, что для увеличения силы тока нужно либо уменьшить сопротивление, либо увеличить напряжение.
I=U/R,
где I – сила тока,
U – напряжение,
R – сопротивление.
Изменение величины сопротивления производится с помощью реостатного контроллера. Так как напряжение контактной сети постоянно, то изменение напряжения можно производить с помощью переключения групп тяговых двигателей с последовательного соединения на параллельное.
При большой скорости вращения якоря в магнитном поле на его обмотках образуется противо-ЭДС, что приводит к уменьшению тока якоря, а следовательно и к уменьшению скорости его вращения. Для уменьшения противо-ЭДС необходимо уменьшить магнитный поток Ф полюсов двигателя. Для этого часть тока отводится от обмоток возбуждения по шунтирующей цепи и магнитное поле тяговых двигателей ослабляется.
Для изменения направления вращения якоря двигателя постоянного тока необходимо изменить направление движения тока в обмотках возбуждения или в обмотках якора. Тогда направление силы Ампера, определяемое по правилу левой руки, так же изменится на противоположное.
Наиболее распространенные способы регулирования скорости вращения ротора асинхронного двигателя: изменение напряжения, подводимого к обмотке статора, изменение частоты питающего напряжения, а также переключение числа пар полюсов.
Частота вращения ротора, выраженная через скольжение, определяется формулой:

Отсюда видно, что для увеличения частоты вращения ротора n2 нужно увеличить частоту вращения магнитного поля n1. Для увеличения частоты вращения поля нужно изменить частоту питающего напряжения на полюсах статора.
Направление вращения ротора асинхронного двигателя определяется направлением вращения его магнитного поля, а направление вращения магнитного поля обуславливается последовательностью фаз (А, В, С) трехфазной сети. Для изменения направления вращения двигателя достаточно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка поступления импульсов тока в отдельные обмотки.
Тяговый двигатель
Тяговый электродвигатель переменного тока — трехфазный, асинхронный с короткозамкнутым ротором, четырехполюсный с инверторным управлением (переменное напряжение и частота) предназначен для преобразования в тяговом режиме потребляемой из контактной сети электрической энергии в механическую энергию вращения ротора для обеспечения вращения колесных пар вагона и обратного преобразования в режимах реостатного и рекуперативного торможения вагона механической энергии в электрическую.
Электродвигатель относится к классу самовентилируемых, имеет вентилятор, устанавливаемый на валу ротора на стороне противоположной выходному валу.

В качестве подшипников применяется компактная подшипниковая система компании Hitachi, позволившая увеличить интервал времени между проведением текущего ремонта.
Поскольку управление двигателем осуществляется при помощи оборудова-ния инверторного управления VVVF, имеется возможность контроля вибрации и температуры.
Контроль частоты вращения двигателя обеспечивает датчик скорости, кото-рый установлен на боковой поверхности двигателя (противоположной ведущей шестерни).
Двигатель состоит из статора и ротора.
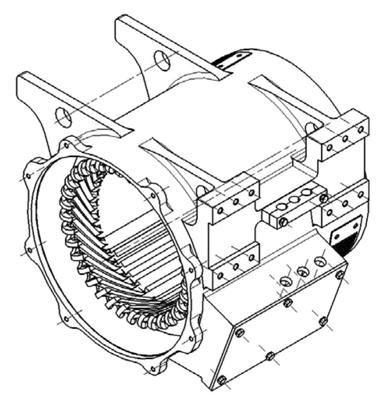
Корпус статора представляет собой механическую конструкцию с элементами крепления двигателя на тележке. В статоре намотана трехфазная обмотка с вакуумной пропиткой лаком, в которой использован изоляционный материал.
Ротор выполнен в виде короткозамкнутой обмотки. Стержни обмотки ротора изготовлены из медно-цинкового сплава. Валдвигателявыполненизхромиро-ванноймолибденовойстали.
| № | характеристика | ДК-108 | ДК-117 |
| 1 | Номинальное напряжение в тяговом режиме, В | 375 | 375 |
| 2 | Номинальное напряжение в генераторном режиме, В | 750 | 750 |
| 3 | Номинальная мощность, Вт | 66 | 110 |
| 4 | Расчетное ослабление поля, % | 35 | 28 |
| 5 | Используемое ослабление поля, % | 55 | 50 |
| 6 | Ток часового режима, А | 202 | 330 |
| 7 | Тип обмотки якоря | волновая | петлевая |
| 8 | Воздушный зазор между полюсом и якорем, мм | 3,25 | 2,5 |
| 9 | Масса, кг | 630 | 700 |
| 10 | Суммарная величина сопротивления обмоток при температуре 20 0 С, Ом | 0,13 | 0,07 |
| Режим | Часовой |
| Мощность (кВт) | 170 |
| Напряжение (В) | 530 |
| Скоростьвращения (об/мин) | 1269 |
| Частота (Гц) | 43 |
| Скольжение (%) | 1.6 |
| Максимальнаярабочаячастота | 3766 |
| вращения (об/мин) | |
| Максимальнодопустимыйток (А) | 321 |
| Вес (кг) | 720 |
Асинхронный тяговый двигатель в сравнении с двигателем постоянного тока имеет большую мощность при том же весе. Кроме того конструкция асинхронного двигателя проще и надежней. Преимуществом асинхронного двигателя перед коллекторным является отсутствие коллекторно-щеточного узла.
Недостатком асинхронного двигателя при эксплуатации в метрополитене является необходимость установки дополнительного оборудования (инверторов) для преобразования постоянного тока в переменный.
Токоприемники рельсовые
Токоприемник рельсовый предназначен для нижнего токосъема с контактного рельса при любых скоростях и любых атмосферных условиях.
Контактная пластина токоприемника скользит по нижней поверхности контактного рельса, обеспечивая надежный токосъем.
Токоприемник рельсовый ТР–3
Общий вид токоприемника представлен на рис.1

Рис.1 Токоприемник ТР-3
1- башмак; 2- контактная пластина; 3,4- левый и правый кронштейн; 5- башмакодержатель; 6- соединительная пластина; 7- две пружины; 8- два шунта; 9- палец для удочки; 10- валик ;11- узел крепления кабеля ТР
Токоприемник монтируется на деревянном брусе, который является изолятором. Брусья токоприемника крепятся болтами по два с каждой стороны вагона к приливам букс колесных пар. Всего на вагоне четыре токоприемника
Держатель башмака с левым и правым кронштейнами связан валиком. Поэтому держатель башмака может поворачиваться по валику.
Левый и правый кронштейны соединены друг с другом стальной соединительной пластиной, расположенной снизу. Поверхности соприкосновения держателя башмака с башмаком имеют гребенку для регулировки высоты подвески башмака над уровнем головки ходового рельса. В нижней части башмака имеются контрольные лунки для определения степени износа контактной пластины. Скосы контактной пластины обеспечивают плавность входа башмака ТР под контактный рельс.
В верхней части держателя башмака имеются приливы с гнездами для установки в них пружин, каждая из которых другим концом упирается в гнезда левого и правого кронштейна. Пружины токоприемника удерживают башмак в верхнем положении и создают необходимое контактное нажатие башмака на контактный рельс.
На правом кронштейне установлен контактный палец, на который надевается втулка подвижного кабеля электродепо «удочка», для подачи высокого напряжения на вагон в условиях депо. К левому кронштейну крепится силовой кабель ТР.
Держатель башмака соединен двумя гибкими медными шунтами с соединительной пластиной кронштейнов, чтобы ток не шел по осевому соединению.
Для отжатия башмака ТР от контактного рельса в левом кронштейне имеется отверстие, куда вставляется штырь, фиксирующий башмак в крайнем нижнем положении.
На новых вагонах установлен пневматический цилиндр для дистанционного отжатия башмаков.
Силовые кабели всех ТР соединены в соединительной коробке, поэтому при наличии напряжения хотя бы на одном токоприемнике, все остальные токоприемники вагона так же будут под напряжением.

Дата добавления: 2018-04-15 ; просмотров: 1313 ; Мы поможем в написании вашей работы!
Направление вращения электродвигателя
Подписка на рассылку
Чтобы механизмы на производстве или в быту, будь-то дерево или металлообрабатывающие станки, консольный насос, конвейерная лента, кран-балка, заточной станок, электрическая газонокосилка, кормоизмельчитель или другое устройство работали без поломок, необходимо, в первую очередь, чтобы вал электродвигателя вращался в правильную сторону.
Во избежание ошибок и не допуска вращения вала механизма в противоположную сторону согласно пункту 2.5.3 «Правил технической эксплуатации электроустановок потребителей» на корпусе самого механизма и приводном двигателе должны быть нанесены стрелки направления вращения электродвигателя.
Направление вращения вала электродвигателя
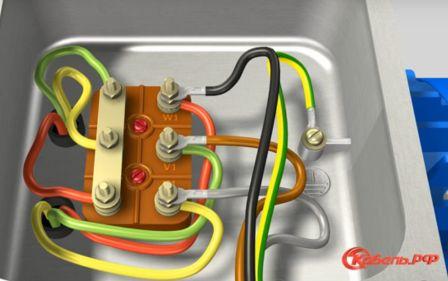 Определение направления вращения электродвигателя выполняется со стороны единственного конца вала. В том случае если двигатель имеет два конца вала, то вращение определяют со стороны вала, который имеет больший диаметр. Согласно ГОСТ 26772-85 правому направлению соответствует движение вала по часовой стрелке. У наиболее распространенных трехфазных двигателей с короткозамкнутым ротором вращение вала в правую сторону будет осуществляться, если последовательность фаз, по которым подается напряжение на концы обмоток статора, будет соответствовать алфавитной последовательности их маркировки – U1, V1, W1.
Определение направления вращения электродвигателя выполняется со стороны единственного конца вала. В том случае если двигатель имеет два конца вала, то вращение определяют со стороны вала, который имеет больший диаметр. Согласно ГОСТ 26772-85 правому направлению соответствует движение вала по часовой стрелке. У наиболее распространенных трехфазных двигателей с короткозамкнутым ротором вращение вала в правую сторону будет осуществляться, если последовательность фаз, по которым подается напряжение на концы обмоток статора, будет соответствовать алфавитной последовательности их маркировки – U1, V1, W1.
Правостороннее вращение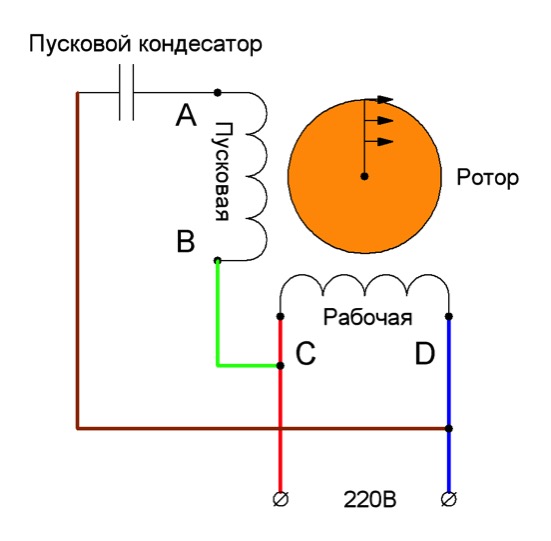
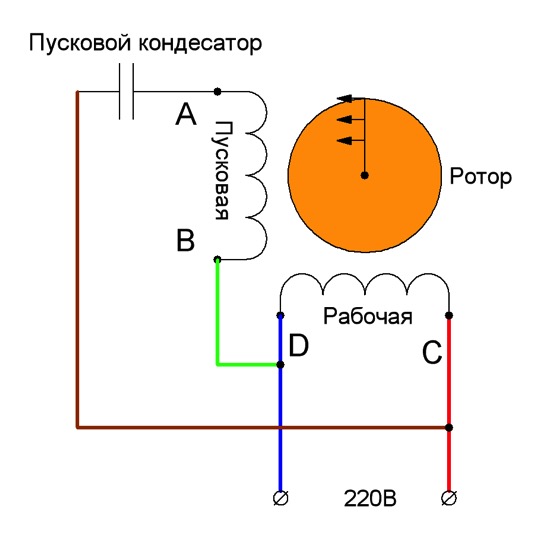
Для однофазных двигателей с короткозамкнутым ротором вращение вала по часовой стрелке будет выполняться при условии, когда фаза будет подаваться на конец рабочей обмотки.
Изменение направления вращения вала в трехфазных электродвигателях
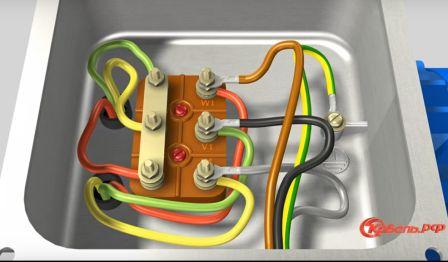
Эксплуатация некоторых механизмов требует левостороннего вращения вала. Зная, как изменить направление вращения электродвигателя, это можно сделать без какой-либо доработки или переделки самого приводного двигателя. Для смены направления движения нужно:
- обесточить электродвигатель;
- снять крышку клеммной коробки;
- переставить жилы силового кабеля в соответствие со схемой изображенной на рис. 3: жилу с изоляцией черного цвета (L3) переподключить на контакт V1 в клеммной коробке, а жилу коричневого цвета (L2) на контакт W1.
 Левостороннее вращение
Левостороннее вращение
Если эксплуатация двигателя требует постоянного переключения двигателя с правостороннего вращения на левостороннее, его подключение осуществляют по специальной схеме,
Реверс однофазного электродвигателя
Запустить вращение однофазного асинхронного электродвигателя можно переподключив фазу на начало рабочей обмотки.
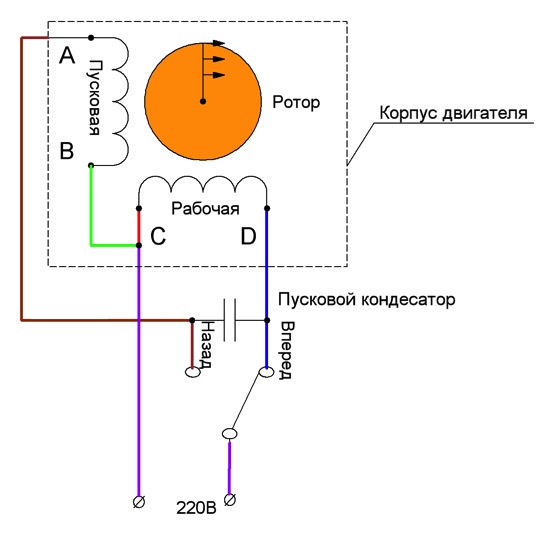 Зная, как поменять направление вращения электродвигателя, можно подключить однофазный электродвигатель с возможностью переключения правостороннего вращения на левостороннее с помощью трехконтактного переключателя.
Зная, как поменять направление вращения электродвигателя, можно подключить однофазный электродвигатель с возможностью переключения правостороннего вращения на левостороннее с помощью трехконтактного переключателя.
§36. Регулирование частоты вращения якоря электродвигателя
Из формулы (65) следует, что частота вращения якоря электродвигателя постоянного тока зависит от падения напряжения Iя?Rя в цепи обмотки якоря, питающего напряжения U и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
включением реостата с сопротивлением Rп в цепь обмотки якоря;
изменением питающего напряжения U;
изменением магнитного потока Ф.
Рассмотрим более подробно эти способы на примере двигателей с последовательным и параллельным возбуждением.
Включение реостата в цепь обмотки якоря. При включении реостата с сопротивлением Rп в цепь обмотки якоря, кроме естественной механической характеристики 1, получают и ряд реостатных характеристик 2, 3 и 4 (рис. 133). При этом заданному нагрузочному моменту Мвн соответствуют различные значения частоты вращения n1, n2, n3 и n4; чем больше сопротивление Rп тем меньше частота вращения якоря двигателя. Такой способ регулирования весьма прост и позволяет осуществлять плавное регулирование частоты вращения в широком диапазоне. (Однако при этом возникают большие потери энергии в регулирующем реостате, вследствие чего его практически применяют только при кратковременных режимах работы двигателя (например, при пуске). Другим недостатком рассматриваемого способа регулирования является то, что частоту вращения п можно только уменьшать от n1 до нуля.
Изменение питающего напряжения. При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
 Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
 Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
 Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
 Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
 Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.
Работа электродвигателя с ослабленным возбуждением при переходных процессах. При включении регулировочного реостата параллельно обмотке возбуждения (см. рис. 137, а) приходится применять специальные меры для сохранения требуемого распределения тока между нею и реостатом при переходных процессах, возникающих в случаях резкого изменения режима работы двигателя, изменения напряжения в контактной сети и пр.
При переходных процессах, когда токи Iя, Iв и Iрв изменяются, в обмотке возбуждения возникает значительная э. д. с. самоиндукции еL. В результате ее действия ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iрв возрастает, т. е. происходит значительно большее ослабление возбуждения. Наиболее опасным переходным процессом для тяговых двигателей, работающих с ослабленным возбуждением, является включение их на полное напряжение после кратковременного отключения от
 Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 139. Направление электромагнитного момента М при различном направлении тока в обмотке якоря и различной полярности полюсов
 Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
сети (при отрыве токоприемника от контактного провода). В этом случае из-за большой э. д. с. самоиндукции еL в первый момент после включения почти весь ток Iя пойдет по регулировочному реостату Rрв, а ток Iв в обмотке возбуждения будет мал. Это приведет к значительному возрастанию тока Iя в обмотке якоря из-за уменьшения э. д. с. Е, индуцированной в ней. Практически при этих условиях возникает резкий бросок тока Iя, сопровождающийся нарушением нормальной коммутации (искрением под щетками) и образованием кругового огня. Кроме того, из-за большой скорости изменения тока создаются большие коммутационные перенапряжения, которые могут вызвать пробой изоляции обмоток якоря и возбуждения.
Бросок тока Iя при включении двигателя под напряжение и скорость его изменения зависят от распределения токов Iв и Iрв между обмоткой возбуждения и регулировочным реостатом Rрв. Чтобы обеспечить при переходных процессах такое же распределение токов Iв и Iрв, как и при стационарном режиме, последовательно с реостатом Rрв включают индуктивный шунт ИШ, представляющий собой катушку с ферромагнитным сердечником. Индуктивность этой катушки подбирают так, чтобы отношение индуктивностей обмотки возбуждения и цепи реостата Rрв было приблизительно равно отношению их сопротивлений. При этом условии возникающие при переходных процессах э. д. с. самоиндукции eL в обмотке возбуждения и eL1 в индуктивном шунте не будут влиять на распределение токов Iв и Iрв и возрастание тока Iя будет небольшим.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Направление момента М определяется правилом левой руки (см. рис. 68,б). Изменить направление М можно двумя способами (рис. 139, а — в): 1) изменением направления тока Iя в обмотке якоря; 2) изменением полярности полюсов, т. е. направления магнитного потока Ф, путем изменения направления тока возбуждения Iв. Для этого переключают провода, подводящие ток к обмотке якоря или к обмотке возбуждения. Например, если при вращении электродвигателя в направлении Вперед ток Iя проходил от щетки А к щетке Б (рис. 140, а), а ток возбуждения Iв — от зажима В1 к зажиму В2, то для перевода двигателя в направление Назад необходимо переключить цепь обмотки якоря так, чтобы ток Iя проходил от щетки Б к щетке А, оставив неизменным направление тока Iв (рис. 140,б), или, оставив неизменным направление тока Iя от А к Б, переключить цепь возбуждения так, чтобы ток Iв проходил от зажима В2 к зажиму В1 (рис. 140, в).