Регулирование частоты вращения двигателей с параллельным возбуждением
 Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Частоту вращения двигателей постоянного тока можно изменять тремя способами: изменением сопротивления rя цепи якоря , изменением магнитного потока Ф , изменением подводимого к двигателю напряжения U.
Первый способ применяют редко, так как он неэкономичен, дает возможность вести регулирование частоты вращения только под нагрузкой и вынуждает использовать механические характеристики, имеющие различный наклон. При регулировании по этому способу вращающий предельно допустимый момент остается постоянным. Магнитный поток не меняется, и если приближенно считать, что сила тока, определяемая длительно допустимым нагревом двигателя, одинакова на всех частотах вращения, то предельно допустимый момент также должен быть одинаков на всех скоростях.
Регулирование скорости двигателей постоянного тока с параллельным возбуждением изменением магнитного потока получило значительное распространение. Величину потока можно изменять реостатом. При увеличении сопротивления этого реостата уменьшается сила тока возбуждения и магнитный поток и увеличивается частота вращения. Каждому уменьшенному значению магнитного потока Ф соответствуют увеличенные значения n0 и b.
Таким образом, при ослаблении магнитного потока механические характеристики представляют собой прямые линии, расположенные выше естественной характеристики, непараллельные ей и имеющие тем больший наклон, чем меньшим потокам они соответствуют. Число их зависит от числа контактов на реостате и может быть достаточно большим. Таким образом, регулирование частоты вращения ослаблением потока может быть сделано практически бесступенчатым.

Если по-прежнему приближенно считать предельно допустимую силу тока на всех скоростях одинаковой, то P = const
Таким образом, при регулировании частоты вращения изменением магнитного потока предельно допустимая мощность двигателя остается постоянной при всех скоростях. Предельно допустимый момент изменяется обратно пропорционально частоте вращения. При повышении частоты вращения двигателя ослаблением поля увеличивается искрение под щетками вследствие роста реактивной э. д. с, наводимой в коммутируемых секциях двигателя.
При работе двигателя с ослабленным потоком уменьшается устойчивость работы, особенно когда нагрузка на валу двигателя является переменной. При малом значении потока заметно размагничивающее действие реакции якоря. Так как размагничивающее действие определяется величиной силы тока якоря электродвигателя, то при изменениях нагрузки частота вращения двигателя резко меняется. Для повышения устойчивости работы регулируемые двигатели с параллельным возбуждением обычно снабжают слабой последовательной обмоткой возбуждения, поток которой частично компенсирует размагничивающее действие реакции якоря.
Двигатели, предназначенные для работы с повышенными частотами вращения, должны обладать повышенной механической прочностью. При высоких скоростях усиливаются вибрации двигателя и шум при работе. Эти причины ограничивают наибольшую частоту вращения электродвигателя. Низшая частота вращения также имеет определенный практический предел.
Номинальный момент определяет размеры и стоимость двигателей постоянного тока (так же как и асинхронных двигателей). При понижении наименьшей, в данном случае номинальной, частоты вращения двигателя определенной мощности номинальный момент его возрастет. Размеры двигателя при этом увеличатся.
На промышленных предприятиях наиболее часто применяют двигатели с диапазонами регулирования

Для расширения диапазона регулирования частоты вращения изменением магнитного потока иногда употребляют особую схему возбуждения двигателя, позволяющую улучшить коммутацию и снизить влияние реакции якоря на высоких частотах вращения двигателя. Питание катушек двух пар полюсов разделяют, образуя две независимые цепи: цепь катушек одной пары полюсов и цепь другой пары.
Одну из цепей включают на постоянное напряжение, в другой изменяют величину и направление тока. При таком включении общий магнитный поток, взаимодействующий с якорем, можно изменять от суммы наибольших значений потоков катушек двух цепей до их разности.
Катушки включены так, что через одну пару полюсов всегда проходит полный магнитный поток. Поэтому реакция якоря сказывается в меньшей степени, чем при ослаблении магнитного потока всех полюсов. Так можно регулировать все многополюсные двигатели постоянного тока с волновой обмоткой якоря. При этом достигается устойчивая работа двигателя в значительном диапазоне скоростей.
Регулирование частоты вращения двигателей постоянного тока посредством изменения подводимого напряжения требует применения специальных схем.
Двигатели постоянного тока по сравнению с асинхронными значительно тяжелее и в несколько раз дороже. К. п. д. этих двигателей ниже, а эксплуатация их более сложна.
Промышленные предприятия получают энергию трехфазного тока, и для получения постоянного тока требуются специальные преобразователи. Это связано с добавочными потерями энергии. Основной причиной применения для привода металлорежущих станков двигателей постоянного тока с параллельным возбуждением является возможность практически бесступенчатого и экономичного регулирования их частоты вращения.
В станкостроении применяют комплектные приводы с выпрямителями и двигателем постоянного тока с параллельным возбуждением (рис. 1). Посредством реостата PC изменяют силу тока возбуждения электродвигателя, обеспечивая практически бесступенчатое регулирование его частоты вращения в диапазоне 2:1. В комплект привода входит пусковой реостат РП, а также аппаратура защиты, на рис. 1 не показанная.
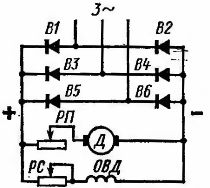
Рис. 1. Схема электропривода постоянного тока с выпрямителем
В ыпрямители (B1 — В6), погруженные в трансформаторное масло, и всю аппаратуру помещают в шкафу управления, а реостат PC устанавливают в месте, удобном для обслуживания.
§36. Регулирование частоты вращения якоря электродвигателя
Из формулы (65) следует, что частота вращения якоря электродвигателя постоянного тока зависит от падения напряжения Iя?Rя в цепи обмотки якоря, питающего напряжения U и магнитного потока Ф. Поэтому ее можно регулировать тремя способами:
включением реостата с сопротивлением Rп в цепь обмотки якоря;
изменением питающего напряжения U;
изменением магнитного потока Ф.
Рассмотрим более подробно эти способы на примере двигателей с последовательным и параллельным возбуждением.
Включение реостата в цепь обмотки якоря. При включении реостата с сопротивлением Rп в цепь обмотки якоря, кроме естественной механической характеристики 1, получают и ряд реостатных характеристик 2, 3 и 4 (рис. 133). При этом заданному нагрузочному моменту Мвн соответствуют различные значения частоты вращения n1, n2, n3 и n4; чем больше сопротивление Rп тем меньше частота вращения якоря двигателя. Такой способ регулирования весьма прост и позволяет осуществлять плавное регулирование частоты вращения в широком диапазоне. (Однако при этом возникают большие потери энергии в регулирующем реостате, вследствие чего его практически применяют только при кратковременных режимах работы двигателя (например, при пуске). Другим недостатком рассматриваемого способа регулирования является то, что частоту вращения п можно только уменьшать от n1 до нуля.
Изменение питающего напряжения. При изменении питающего напряжения частота вращения п изменяется пропорционально U. Следовательно, подавая на обмотку якоря различные напряжения U1, U2, U3, можно получить семейство механических характе-
 Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
Рис. 133. Механические характеристики электродвигателей с последовательным (а) и независимым или параллельным (б) возбуждением при регулировании частоты вращения включением реостата в цепь обмотки якоря
 Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
Рис. 134. Механические характеристики электродвигателя с последовательным (а) и независимым (б) возбуждением при регулировании частоты вращения путем изменения питающего напряжения
 Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
Рис. 135. Схемы питания электродвигателя с последовательным возбуждением от генератора (а) и выпрямителя (б)
ристик 1, 2 и 3, у которых при любой нагрузке n1:n2:n3 = U1:U2:U3 (рис. 134). При уменьшении питающего напряжения механические характеристики двигателя смещаются в область меньших частот вращения и располагаются параллельно. Для осуществления указанного способа регулирования частоты вращения двигатель должен быть подключен к источнику постоянного тока с регулируемым напряжением: к генератору Т с независимым возбуждением (рис. 135, а) или выпрямителю Вn (рис. 135,б). Питание тяговых двигателей от генератора осуществляется на тепловозах, а от выпрямителя — на электровозах и электропоездах переменного тока. На электровозах и электропоездах выпрямитель подключают к трансформатору, позволяющему изменять напряжение, подаваемое на вход выпрямителя, а следовательно, и его выходное напряжение U. На тепловозах в цепях управления имеется специальная электрическая аппаратура, позволяющая изменять ток возбуждения генератора, т. е. его выходное напряжение U, ручным способом или автоматически.
Несмотря на то, что рассмотренный способ требует довольно сложного оборудования, его широко применяют на современных локомотивах и электропоездах, так как он обеспечивает плавное и экономичное (без потерь энергии в реостатах) регулирование частоты вращения в очень широких пределах. Следует отметить, что для электродвигателей с параллельным возбуждением указанный способ регулирования применять нельзя, так как при уменьшении питающего напряжения соответственно уменьшался бы магнитный поток двигателя и увеличивался ток обмотки якоря. В этом случае двигатель должен быть переведен на независимое возбуждение.
На э. п. с. постоянного тока напряжение, подводимое от контактной сети к электровозу или моторному вагону, не может регулироваться, поэтому здесь для изменения подаваемого к двигателям напряжения применяют последовательно-параллельное переключение тяговых двигателей. При этом изменяется напряжение, приходящееся на каждый двигатель локомотива, и частота вращения.
При регулировании частоты вращения двигателей путем их последовательно-параллельного переключения число возможных схем соединений зависит от числа двигателей, установленных на данном локомотиве. Например, на четырехосных электровозах может быть использовано последовательное соединение тяговых двигателей (рис. 136, а); при этом напряжение, подводимое к двигателю, в 4 раза меньше напряжения U в контактной сети и двигатель имеет некоторую минимальную частоту вращения nmin при заданном моменте Мвн. При соединении двигателей в две параллельные группы (рис. 136, б), в каждую из которых включено по два последовательно соединенных двигателя, напряжение, подводимое к каждому двигателю, будет в 2 раза меньше напряжения U в контактной сети и частота его вращения будет составлять 2nmin. Характеристики двигателей при этом располагаются одна над другой (рис. 136, в).
Последовательно-параллельное переключение тяговых двигателей применяют также на тепловозах. Это позволяет ограничить диапазон регулирования напряжения генератора, от которого зависят его габаритные размеры и масса.
Изменение магнитного потока. Для того чтобы изменить магнитный поток Ф, регулируют ток возбуждения двигателя с помощью
 Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
Рис. 136. Схемы соединения тяговых двигателей на четырехосных электровозах или электропоездах (а и б) и механические характеристики двигателей при различных схемах соединения (в): 1 — последовательное соединение; 2— последовательно-параллельное соединение
 Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
Рис. 137. Схема включения регулировочного реостата параллельно обмотке возбуждения в двигателе с последовательным возбуждением (а) и механические характеристики (б) при различных сопротивлениях реостата
регулировочного реостата Rрв (рис. 137, а). В двигателях с после-довательньм возбуждением регулировочный реостат включают параллельно обмотке возбуждения, вследствие чего через обмотку возбуждения будет протекать только часть тока якоря (другая часть ответвляется в точке О в реостат Rрв). Обычно регулировочный реостат имеет несколько ступеней с сопротивлениями R1, R2, R3, которые позволяют получать несколько ступеней регулирования тока возбуждения двигателя.
Включение ступеней R1, R2, R3 осуществляется контакторами 1, 2 и 3; при этом механические характеристики двигателя 2 (при включении ступени R1), 3 (при включении R1 и R2 и 4 (при включении R1, R2 и R3) располагаются выше естественной характеристики 1 (рис. 137,б).
Степень регулирования тока возбуждения характеризуется коэффициентом регулирования возбуждения ?, который представляет собой отношение тока возбуждения Iв0 при ослабленном возбуждении (включен регулировочный реостат Rрв) к току возбуждения Iвн при нормальном возбуждении при одном и том же токе в обмотке якоря:
? = Iв0/Iвн = Rвн/(Rв+Rвн)
где Rв — сопротивление обмотки возбуждения.
Рассмотренный способ регулирования прост и экономичен, поэтому его широко применяют на локомотивах и электропоездах. Однако в этом случае регулирование частоты вращения можно осуществлять только в сравнительно небольшом диапазоне. Нижний предел nmin ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток, верхний предел nmax—условиями устойчивости (при сильном уменьшении Ф двигатель идет вразнос), а также тем, что при глубоком ослаблении возбуждения сильно увеличивается ток якоря Iя, что приводит к возрастанию реактивной э. д. с. и искажающего действия реакции якоря. При этом повышается опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, обязательно должны иметь компенсационную обмотку и пониженное значение реактивной э. д. с. при номинальном режиме. Обычно предельное значение коэффициента возбуждения ? для двигателей без компенсационной обмотки составляет 0,3—0,33, а при наличии компенсационной обмотки — 0,2.
В двигателях с независимым и параллельным возбуждением регулировочный реостат, посредством которого изменяют ток возбуждения Iв и магнитный поток Ф, включают последовательно с обмоткой возбуждения (см. рис. 125). В этом случае при изменении тока возбуждения частота вращения n при холостом ходе будет изменяться, т. е. механическая характеристика 2 при ослабленном возбуждении будет располагаться выше характеристики 1 при нормальном возбуждении (рис. 138). Однако характеристики 1 и 2 при различных значениях Ф не будут параллельны, так как согласно формуле (65) изменяется снижение частоты вращения, обусловленное падением напряжения Iя?Rя в цепи обмотки якоря.
Работа электродвигателя с ослабленным возбуждением при переходных процессах. При включении регулировочного реостата параллельно обмотке возбуждения (см. рис. 137, а) приходится применять специальные меры для сохранения требуемого распределения тока между нею и реостатом при переходных процессах, возникающих в случаях резкого изменения режима работы двигателя, изменения напряжения в контактной сети и пр.
При переходных процессах, когда токи Iя, Iв и Iрв изменяются, в обмотке возбуждения возникает значительная э. д. с. самоиндукции еL. В результате ее действия ток Iв уменьшается по сравнению с его значением при стационарном режиме, а ток Iрв возрастает, т. е. происходит значительно большее ослабление возбуждения. Наиболее опасным переходным процессом для тяговых двигателей, работающих с ослабленным возбуждением, является включение их на полное напряжение после кратковременного отключения от
 Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 138. Механические характеристики электродвигателя с независимым и параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
Рис. 139. Направление электромагнитного момента М при различном направлении тока в обмотке якоря и различной полярности полюсов
 Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
Рис. 140. Схемы переключений обмотки электродвигателя с последовательным возбуждением при изменении направления вращения
сети (при отрыве токоприемника от контактного провода). В этом случае из-за большой э. д. с. самоиндукции еL в первый момент после включения почти весь ток Iя пойдет по регулировочному реостату Rрв, а ток Iв в обмотке возбуждения будет мал. Это приведет к значительному возрастанию тока Iя в обмотке якоря из-за уменьшения э. д. с. Е, индуцированной в ней. Практически при этих условиях возникает резкий бросок тока Iя, сопровождающийся нарушением нормальной коммутации (искрением под щетками) и образованием кругового огня. Кроме того, из-за большой скорости изменения тока создаются большие коммутационные перенапряжения, которые могут вызвать пробой изоляции обмоток якоря и возбуждения.
Бросок тока Iя при включении двигателя под напряжение и скорость его изменения зависят от распределения токов Iв и Iрв между обмоткой возбуждения и регулировочным реостатом Rрв. Чтобы обеспечить при переходных процессах такое же распределение токов Iв и Iрв, как и при стационарном режиме, последовательно с реостатом Rрв включают индуктивный шунт ИШ, представляющий собой катушку с ферромагнитным сердечником. Индуктивность этой катушки подбирают так, чтобы отношение индуктивностей обмотки возбуждения и цепи реостата Rрв было приблизительно равно отношению их сопротивлений. При этом условии возникающие при переходных процессах э. д. с. самоиндукции eL в обмотке возбуждения и eL1 в индуктивном шунте не будут влиять на распределение токов Iв и Iрв и возрастание тока Iя будет небольшим.
Изменение направления вращения. Чтобы изменить направление вращения двигателя, необходимо изменить направление электромагнитного момента М, действующего на якорь. Направление момента М определяется правилом левой руки (см. рис. 68,б). Изменить направление М можно двумя способами (рис. 139, а — в): 1) изменением направления тока Iя в обмотке якоря; 2) изменением полярности полюсов, т. е. направления магнитного потока Ф, путем изменения направления тока возбуждения Iв. Для этого переключают провода, подводящие ток к обмотке якоря или к обмотке возбуждения. Например, если при вращении электродвигателя в направлении Вперед ток Iя проходил от щетки А к щетке Б (рис. 140, а), а ток возбуждения Iв — от зажима В1 к зажиму В2, то для перевода двигателя в направление Назад необходимо переключить цепь обмотки якоря так, чтобы ток Iя проходил от щетки Б к щетке А, оставив неизменным направление тока Iв (рис. 140,б), или, оставив неизменным направление тока Iя от А к Б, переключить цепь возбуждения так, чтобы ток Iв проходил от зажима В2 к зажиму В1 (рис. 140, в).